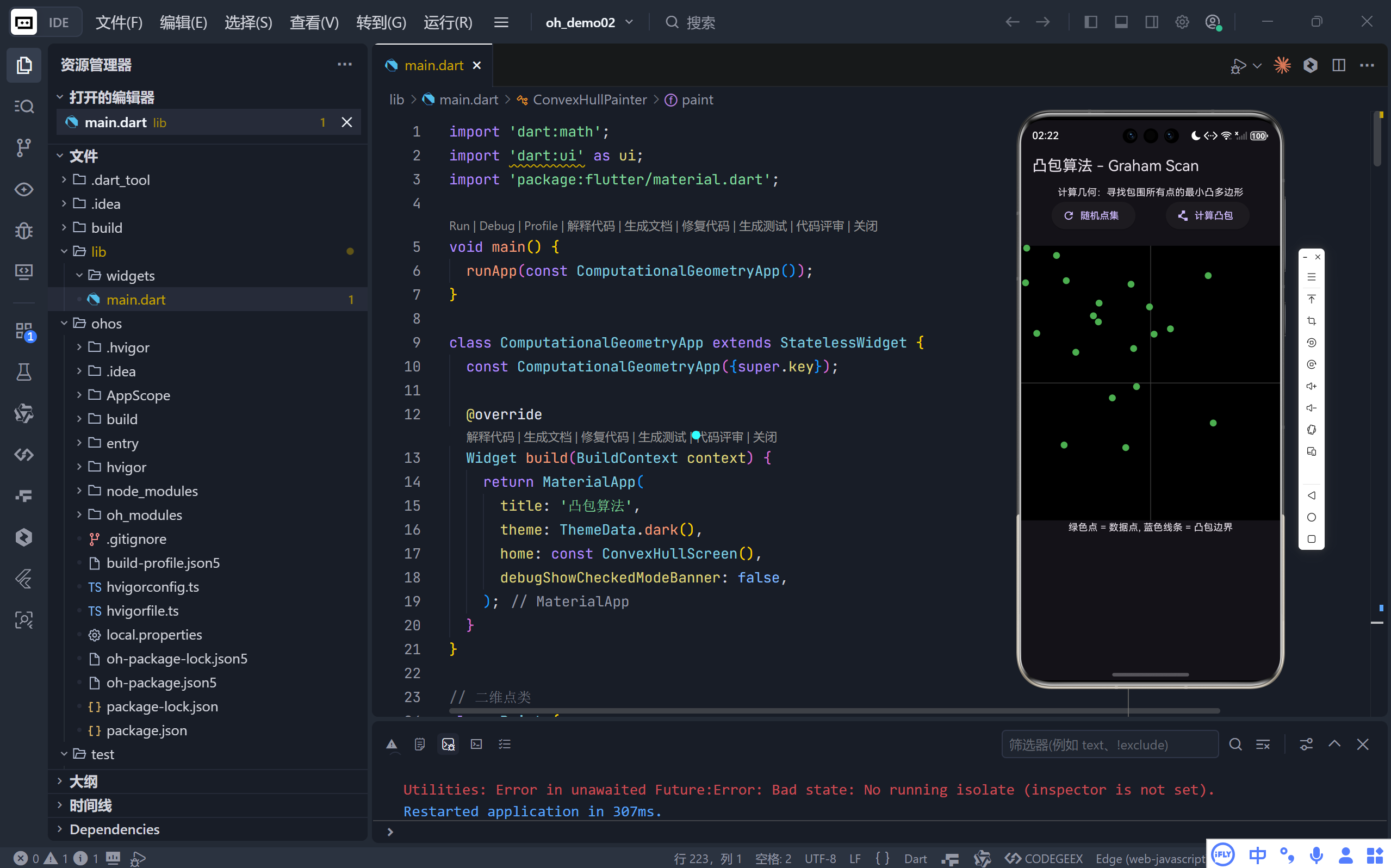
Flutter for OpenHarmony 实现计算几何:Graham Scan 凸包算法的可视化演示
在计算几何学中,凸包问题是一个基础且重要的研究领域。它不仅具有理论意义,在计算机图形学、地理信息系统(GIS)、机器人路径规划等领域也有广泛应用。本文将通过一段完整的 Flutter 代码示例,展示如何利用 Graham Scan 算法实现二维点集的凸包计算,并以直观的 UI 展示其形成过程。
🌐 加入社区 欢迎加入 开源鸿蒙跨平台开发者社区 ,获取最新资源与技术支持: 👉 开源鸿蒙跨平台开发者社区
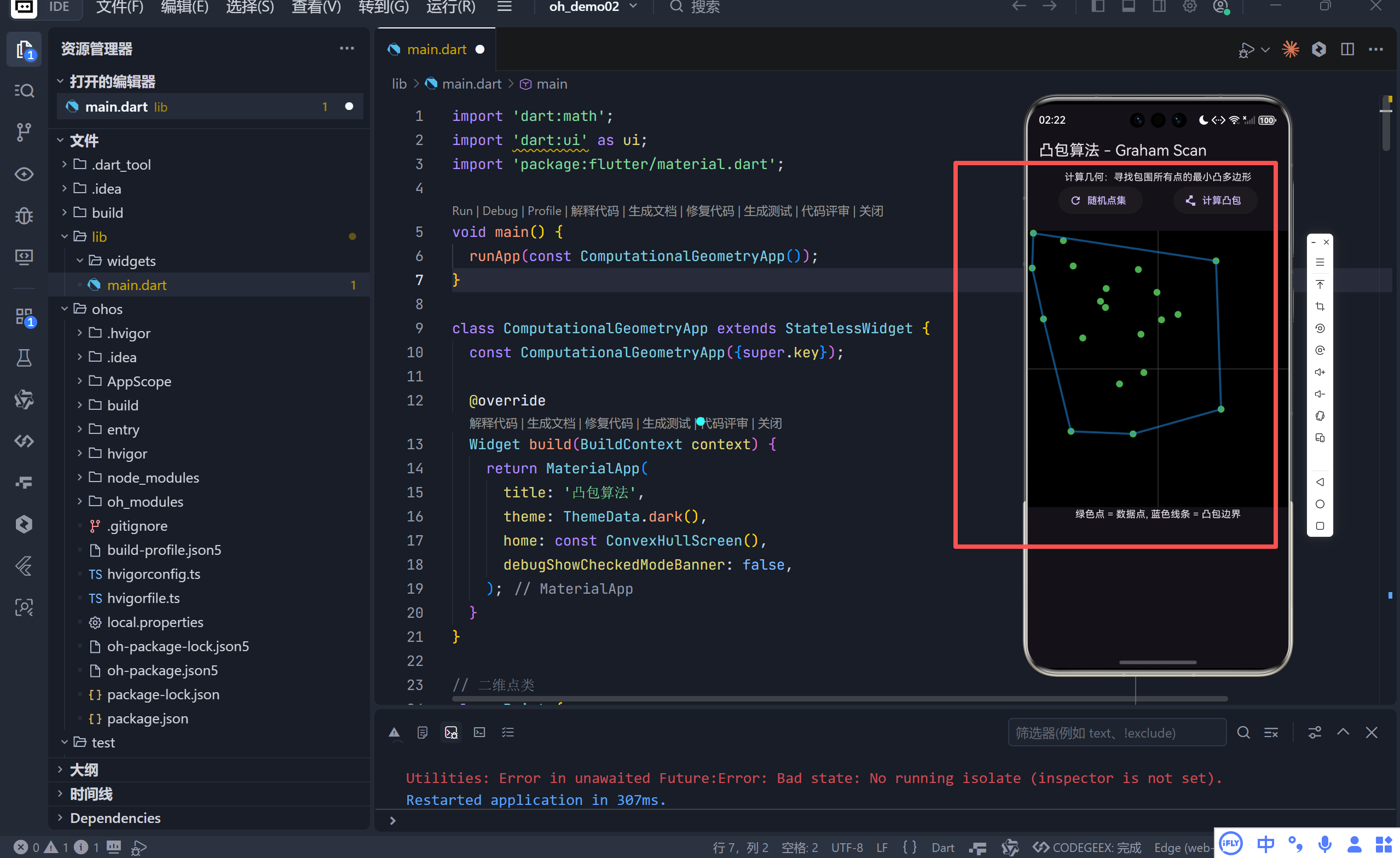
完整效果
一、项目概述
应用功能
该应用主要实现了以下功能:
- 自动生成随机分布的二维点集;
- 使用 Graham Scan 算法计算并显示这些点的最小凸多边形(即凸包);
- 动态展示凸包构建的过程,增强用户对算法的理解。
核心技术
- Dart:Flutter 的编程语言,用于编写逻辑和界面。
- Graham Scan 算法:一种高效计算平面点集凸包的经典算法,时间复杂度为 O(n log n)。
- CustomPaint 组件:Flutter 中绘制自定义图形的关键组件。
二、Graham Scan 算法详解
1. 基本思想
Graham Scan 通过如下步骤找到点集的凸包:
- 选择基准点:通常选取 y 坐标最小的点作为起点(如果存在多个这样的点,则选 x 坐标最小者)。
- 排序剩余点:基于与基准点的极角大小对其他点进行排序;若角度相同,则距离近者优先。
- 构造栈结构:遍历排序后的点集,使用栈维护当前凸包边界上的点,确保每增加一个新点时,形成的转向均为左转(逆时针方向),否则移除栈顶元素直至满足条件。
2. 关键函数解释
dart
// 计算叉积 (判断转向)
double _crossProduct(Point o, Point a, Point b) {
return (a.x - o.x) * (b.y - o.y) - (a.y - o.y) * (b.x - o.x);
}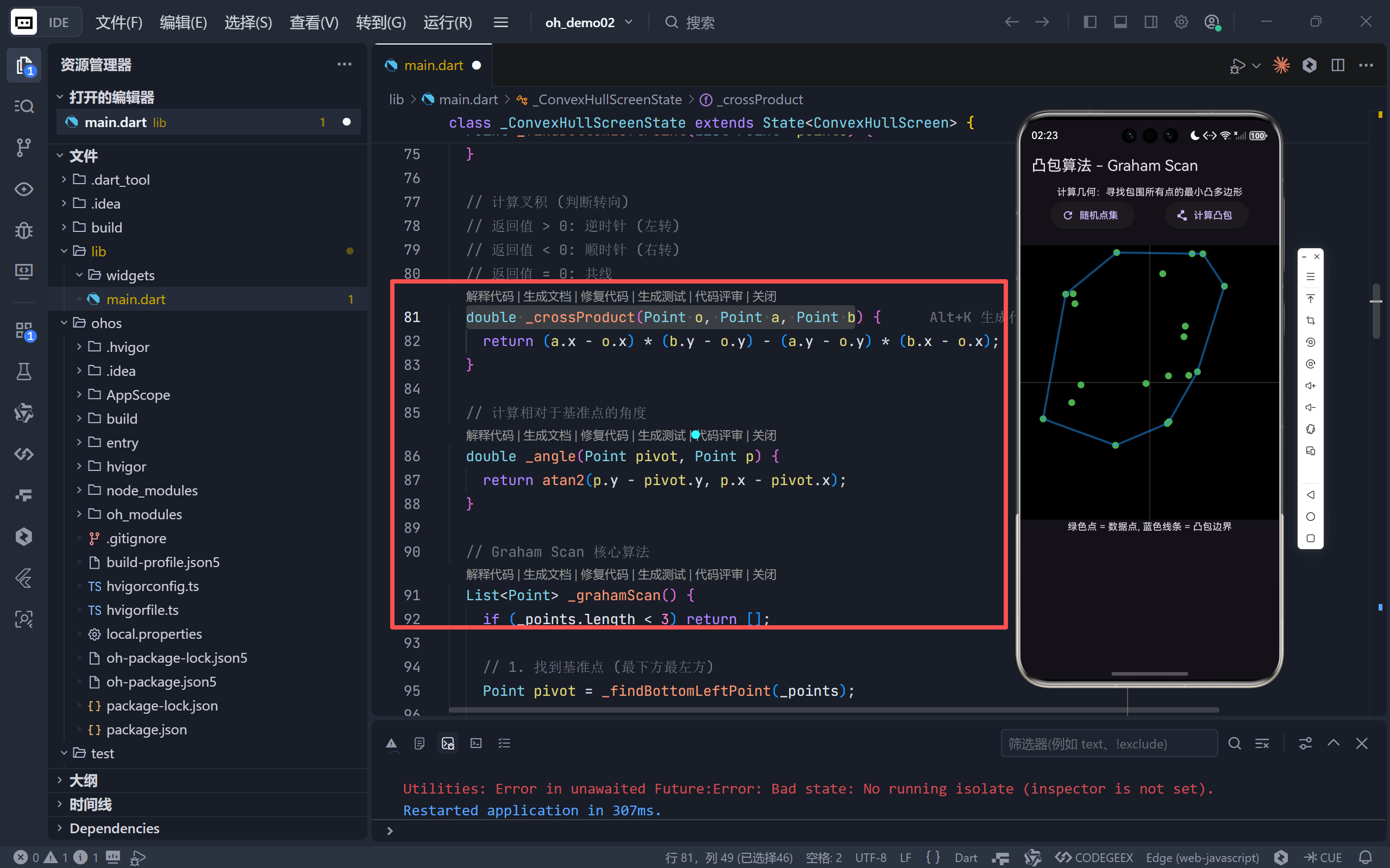
此函数用于判断三个点
o,a,b形成的方向。正数表示左转,负数表示右转,零则代表三点共线。
dart
// 按照相对于基准点的角度进行排序
List<Point> sortedPoints = List.from(_points);
sortedPoints.sort((a, b) {
double angleA = _angle(pivot, a);
double angleB = _angle(pivot, b);
if (angleA == angleB) {
// 如果角度相同,距离近的排在前面
return pivot.distanceTo(a).compareTo(pivot.distanceTo(b));
}
return angleA.compareTo(angleB);
});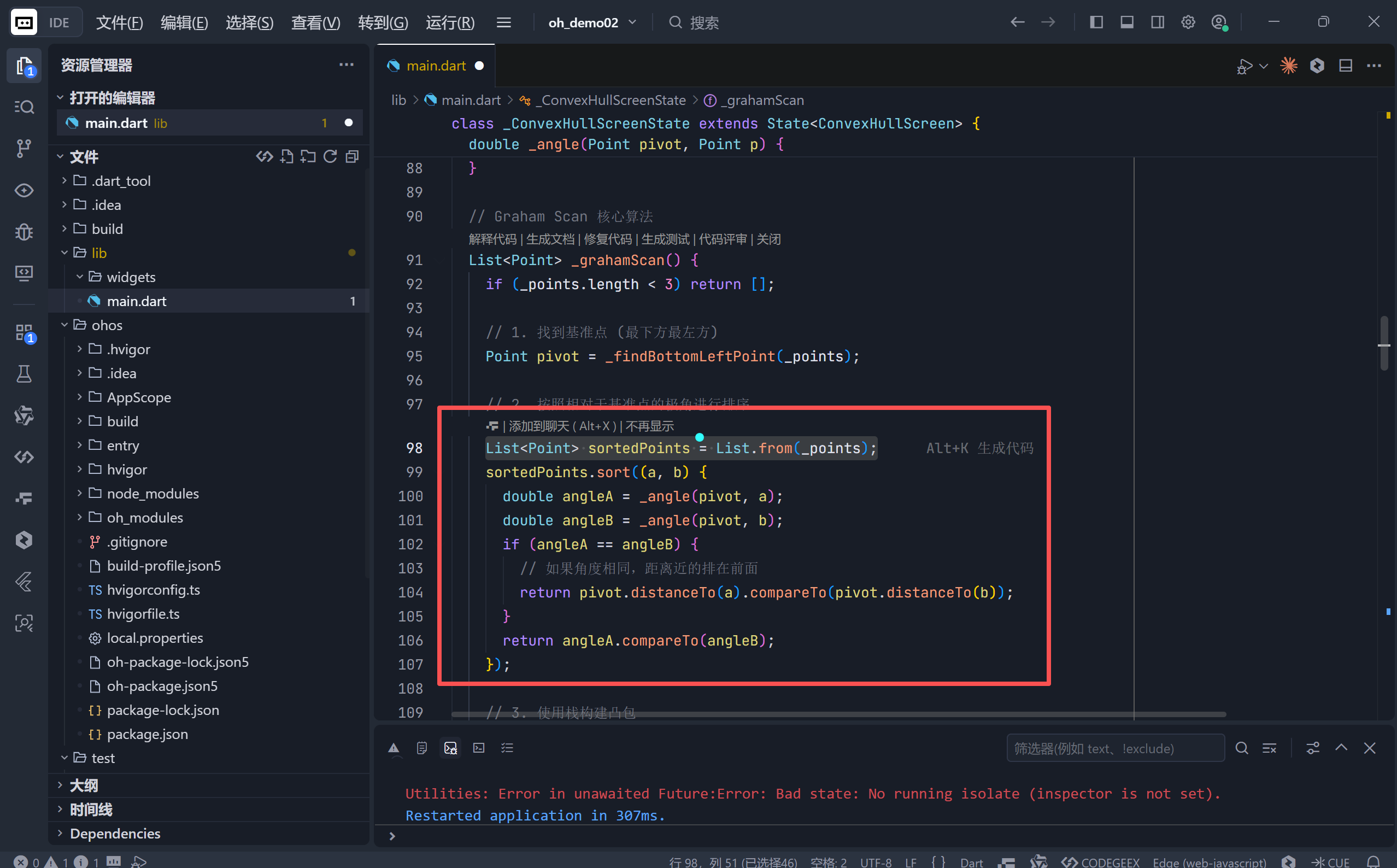
这里首先计算每个点相对于基准点的角度,然后根据角度大小排序,处理特殊情况(如角度相同时按距离排序)。
三、UI 设计与交互体验
1. 主界面布局
- 顶部操作区:包含两个按钮------"随机点集"用于重新生成点,"计算凸包"触发 Graham Scan 算法执行。
- 绘图区域 :采用
CustomPaint组件动态绘制点集及其凸包边界。绿色圆点代表原始数据点,蓝色线条描绘最终形成的凸包轮廓。 - 提示信息:简要说明各颜色标记的意义,帮助用户理解界面元素。
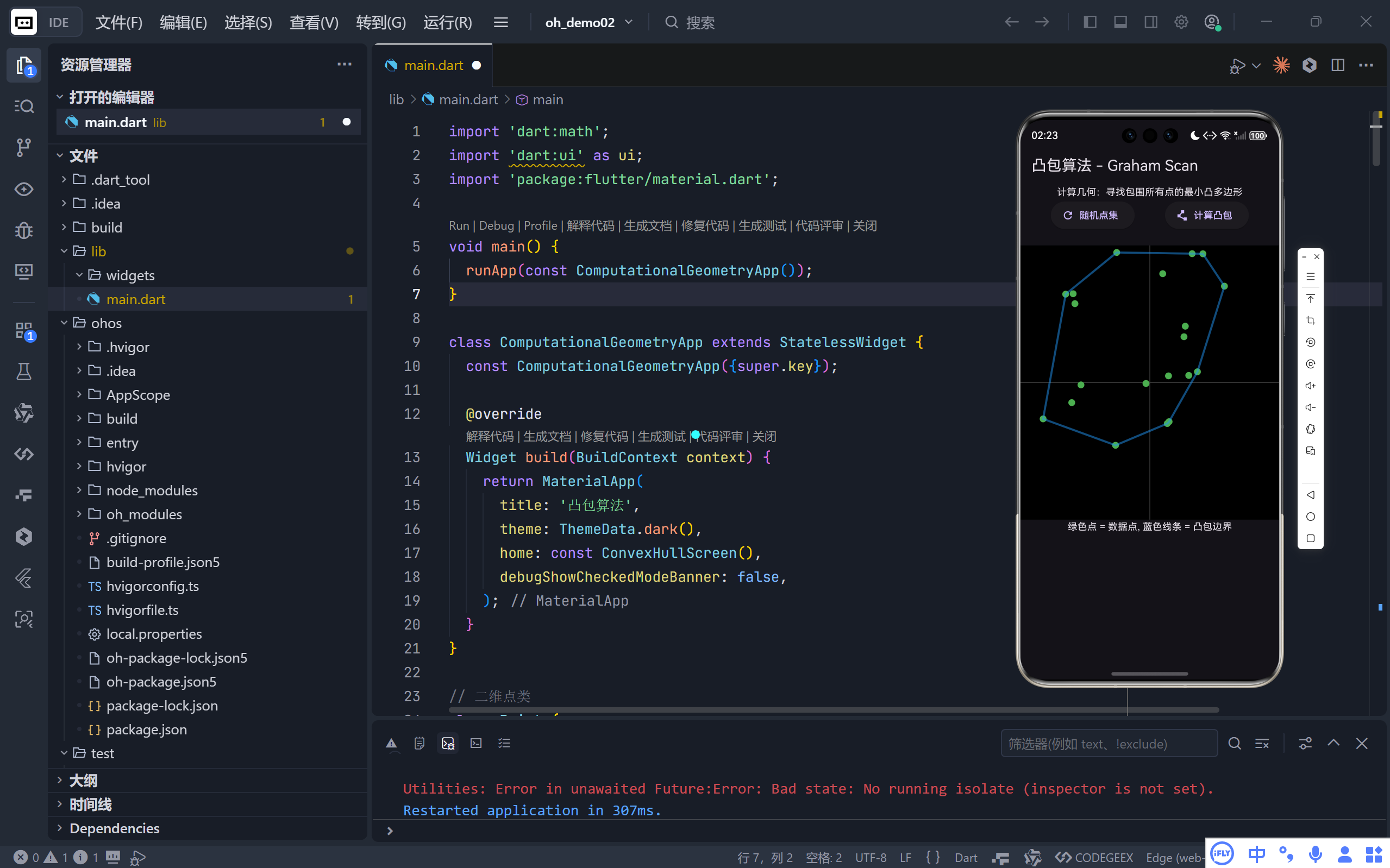
2. 动态效果
为了增强教学效果,每当点击"计算凸包"按钮后,程序会模拟一定延迟,逐步显示出凸包构建的全过程。这不仅让抽象的数学运算变得生动具体,也加深了对算法流程的认识。
四、代码亮点分析
1. 数据结构设计
dart
class Point {
final double x, y;
Point(this.x, this.y);
double distanceTo(Point other) {
return sqrt(pow(x - other.x, 2) + pow(y - other.y, 2));
}
}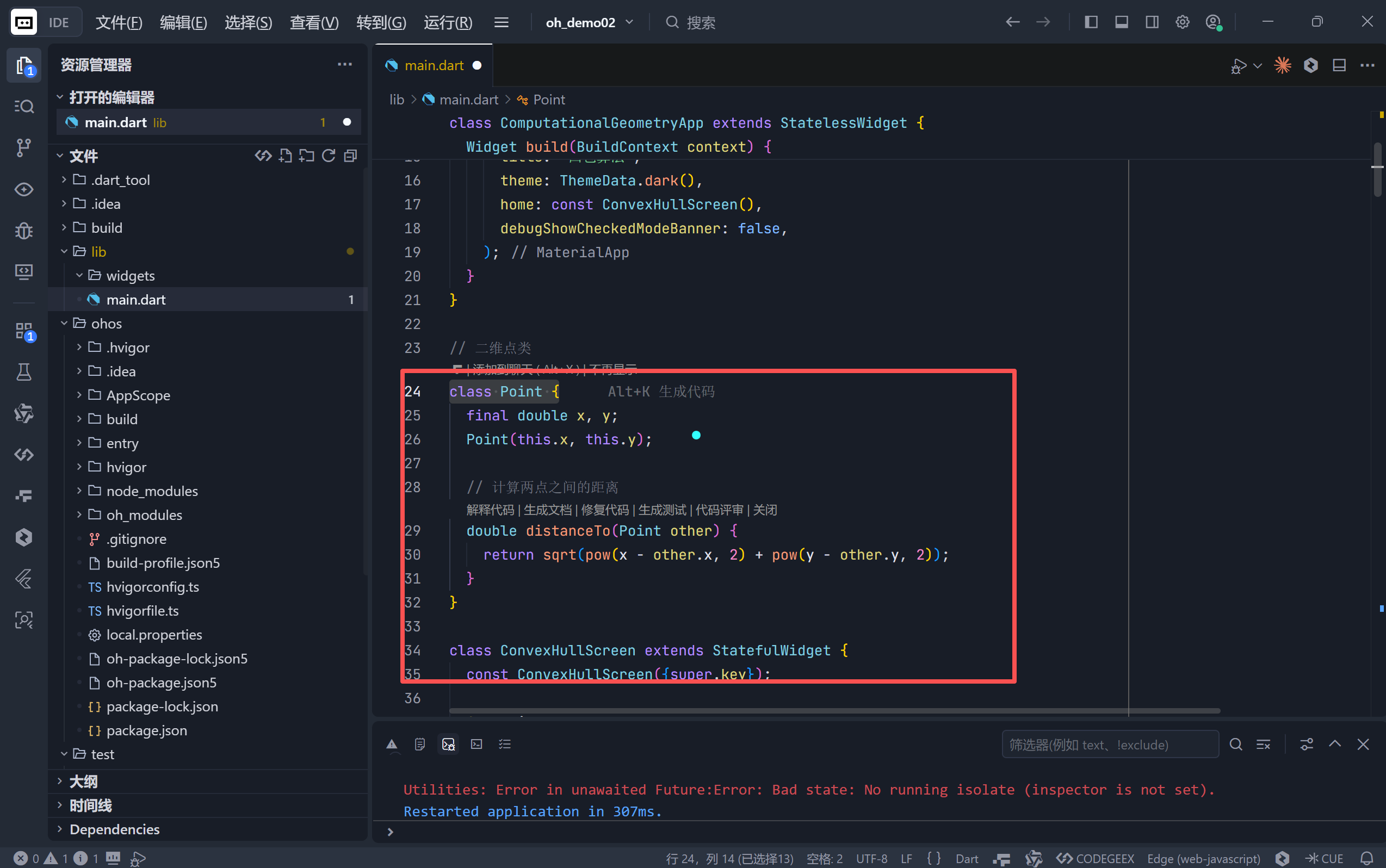
简洁明了地定义了二维点类,内含坐标属性及两点间距离计算方法,便于后续调用。
2. 异步处理
dart
void _computeHull() async {
...
await Future.delayed(const Duration(milliseconds: 500));
...
for (int i = 0; i <= hull.length; i++) {
...
await Future.delayed(const Duration(milliseconds: 300));
}
}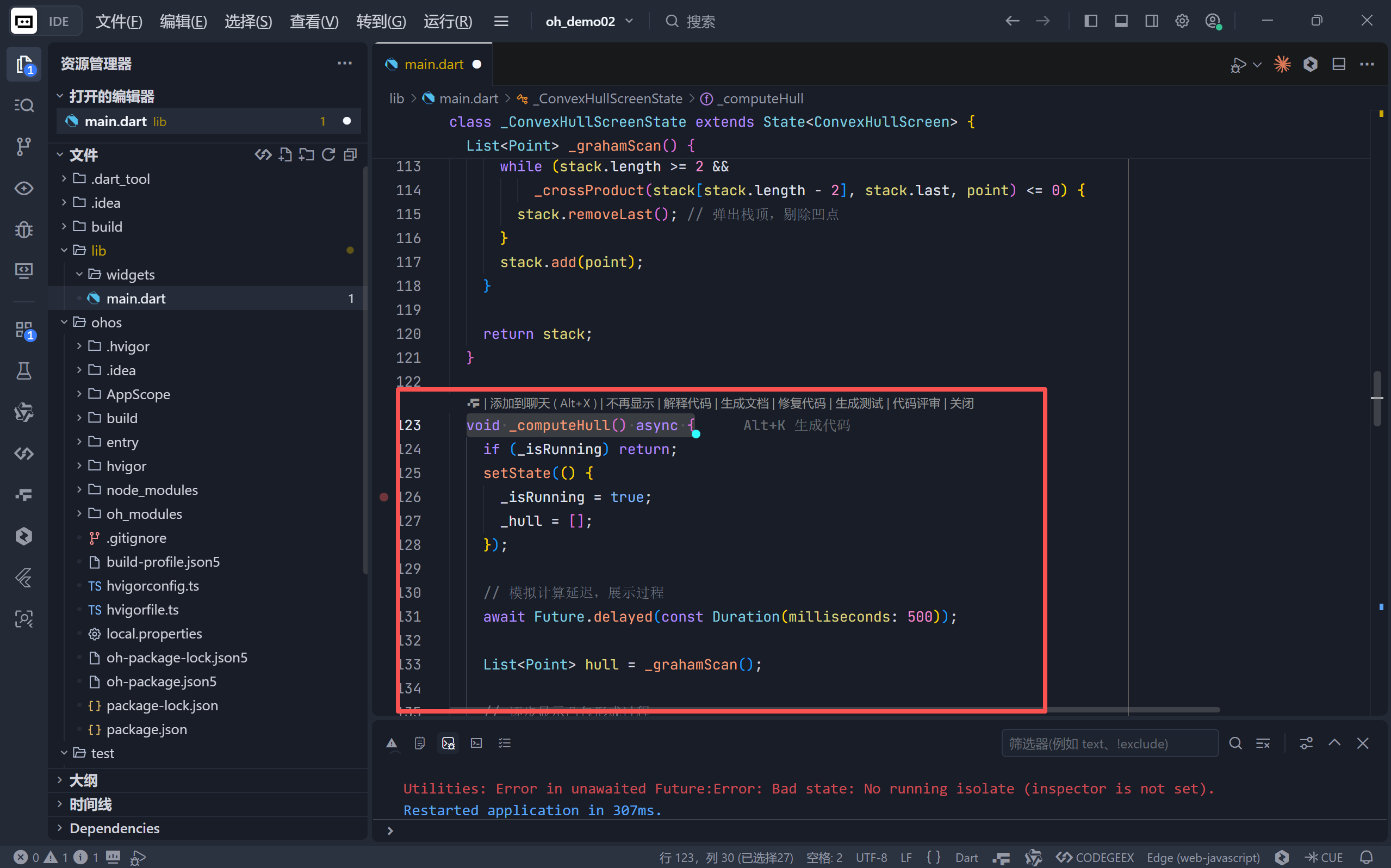
通过异步函数结合延时器,巧妙实现了动画效果,使凸包形成过程得以分步呈现。
五、结论与展望
通过这段 Flutter 应用,我们不仅能深入理解 Graham Scan 算法的工作原理,还能领略到计算几何的魅力所在。尽管这里的实现针对的是简单的二维空间,但其所蕴含的思想同样适用于更高维度的问题求解。未来可以考虑加入更多类型的计算几何算法,进一步丰富学习资源,或集成实际应用场景的数据集,提升实用性。
完整代码
bash
import 'dart:math';
import 'dart:ui' as ui;
import 'package:flutter/material.dart';
void main() {
runApp(const ComputationalGeometryApp());
}
class ComputationalGeometryApp extends StatelessWidget {
const ComputationalGeometryApp({super.key});
@override
Widget build(BuildContext context) {
return MaterialApp(
title: '凸包算法',
theme: ThemeData.dark(),
home: const ConvexHullScreen(),
debugShowCheckedModeBanner: false,
);
}
}
// 二维点类
class Point {
final double x, y;
Point(this.x, this.y);
// 计算两点之间的距离
double distanceTo(Point other) {
return sqrt(pow(x - other.x, 2) + pow(y - other.y, 2));
}
}
class ConvexHullScreen extends StatefulWidget {
const ConvexHullScreen({super.key});
@override
State<ConvexHullScreen> createState() => _ConvexHullScreenState();
}
class _ConvexHullScreenState extends State<ConvexHullScreen> {
List<Point> _points = [];
List<Point> _hull = [];
bool _isRunning = false;
@override
void initState() {
super.initState();
_generateRandomPoints();
}
// 生成随机点
void _generateRandomPoints() {
final random = Random();
setState(() {
_points = List.generate(20, (index) {
return Point(
random.nextDouble() * 300,
random.nextDouble() * 300,
);
});
_hull = [];
});
}
// 寻找最下方(最左方)的点作为基准点
Point _findBottomLeftPoint(List<Point> points) {
Point bottomLeft = points[0];
for (Point p in points) {
if (p.y < bottomLeft.y || (p.y == bottomLeft.y && p.x < bottomLeft.x)) {
bottomLeft = p;
}
}
return bottomLeft;
}
// 计算叉积 (判断转向)
// 返回值 > 0: 逆时针 (左转)
// 返回值 < 0: 顺时针 (右转)
// 返回值 = 0: 共线
double _crossProduct(Point o, Point a, Point b) {
return (a.x - o.x) * (b.y - o.y) - (a.y - o.y) * (b.x - o.x);
}
// 计算相对于基准点的角度
double _angle(Point pivot, Point p) {
return atan2(p.y - pivot.y, p.x - pivot.x);
}
// Graham Scan 核心算法
List<Point> _grahamScan() {
if (_points.length < 3) return [];
// 1. 找到基准点 (最下方最左方)
Point pivot = _findBottomLeftPoint(_points);
// 2. 按照相对于基准点的极角进行排序
List<Point> sortedPoints = List.from(_points);
sortedPoints.sort((a, b) {
double angleA = _angle(pivot, a);
double angleB = _angle(pivot, b);
if (angleA == angleB) {
// 如果角度相同,距离近的排在前面
return pivot.distanceTo(a).compareTo(pivot.distanceTo(b));
}
return angleA.compareTo(angleB);
});
// 3. 使用栈构建凸包
List<Point> stack = [];
for (Point point in sortedPoints) {
// 如果栈中至少有两个点,检查是否为右转
while (stack.length >= 2 &&
_crossProduct(stack[stack.length - 2], stack.last, point) <= 0) {
stack.removeLast(); // 弹出栈顶,剔除凹点
}
stack.add(point);
}
return stack;
}
void _computeHull() async {
if (_isRunning) return;
setState(() {
_isRunning = true;
_hull = [];
});
// 模拟计算延迟,展示过程
await Future.delayed(const Duration(milliseconds: 500));
List<Point> hull = _grahamScan();
// 逐步显示凸包形成过程
for (int i = 0; i <= hull.length; i++) {
if (!_isRunning) break;
setState(() {
_hull = hull.sublist(0, i);
});
await Future.delayed(const Duration(milliseconds: 300));
}
setState(() {
_isRunning = false;
});
}
@override
Widget build(BuildContext context) {
return Scaffold(
appBar: AppBar(
title: const Text('凸包算法 - Graham Scan'),
),
body: Column(
children: [
const Text('计算几何:寻找包围所有点的最小凸多边形'),
Row(
mainAxisAlignment: MainAxisAlignment.spaceEvenly,
children: [
ElevatedButton.icon(
onPressed: _generateRandomPoints,
icon: const Icon(Icons.refresh),
label: const Text('随机点集'),
),
ElevatedButton.icon(
onPressed: _computeHull,
icon: const Icon(Icons.polyline),
label: Text(_isRunning ? '计算中...' : '计算凸包'),
),
],
),
const SizedBox(height: 20),
CustomPaint(
size: const Size(400, 400),
painter: ConvexHullPainter(_points, _hull),
),
const Text('绿色点 = 数据点, 蓝色线条 = 凸包边界'),
],
),
);
}
}
class ConvexHullPainter extends CustomPainter {
final List<Point> points;
final List<Point> hull;
ConvexHullPainter(this.points, this.hull);
@override
void paint(Canvas canvas, Size size) {
final bgPaint = Paint()..color = Colors.black;
canvas.drawRect(Rect.fromLTWH(0, 0, size.width, size.height), bgPaint);
// 绘制坐标系背景 (可选)
final axisPaint = Paint()
..color = Colors.grey[800]!
..strokeWidth = 1;
canvas.drawLine(Offset(0, size.height / 2),
Offset(size.width, size.height / 2), axisPaint);
canvas.drawLine(Offset(size.width / 2, 0),
Offset(size.width / 2, size.height), axisPaint);
// 绘制所有数据点
final pointPaint = Paint()
..color = Colors.green
..style = PaintingStyle.fill;
for (var point in points) {
canvas.drawCircle(Offset(point.x, point.y), 5, pointPaint);
}
// 绘制凸包连线
if (hull.isNotEmpty) {
final hullPaint = Paint()
..color = Colors.blue.withOpacity(0.5)
..style = PaintingStyle.stroke
..strokeWidth = 3
..strokeCap = StrokeCap.round;
Path path = Path();
path.moveTo(hull[0].x, hull[0].y);
for (int i = 1; i < hull.length; i++) {
path.lineTo(hull[i].x, hull[i].y);
}
// 如果凸包闭合,画回起点
if (hull.length > 2) {
path.close();
}
canvas.drawPath(path, hullPaint);
}
}
@override
bool shouldRepaint(covariant CustomPainter oldDelegate) => true;
}