OpenMV官方机械臂第六期视频教程来啦!今天我们解锁"按键示教"及"TXT控制"的新玩法,无需复杂编程即可掌握更灵活、更具交互性的逻辑控制方案!
*具体教程和源码可在星瞳科技OpenMV官网[OpenMV.cc](http://openmv.cc/ "OpenMV.cc")查看哦!
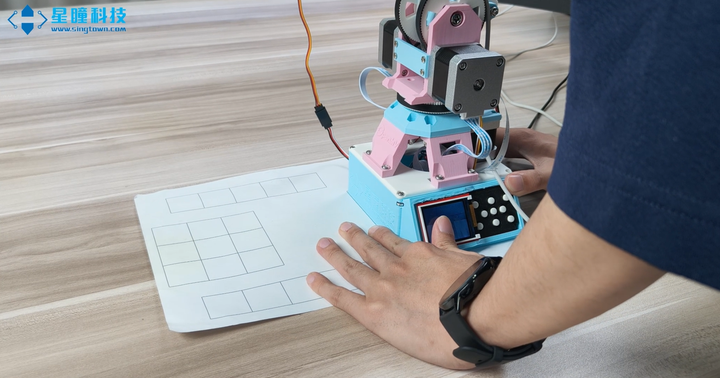
机械臂连接12V电源并将OpenMV通过数据线连接PC端后,将机械臂底座与地图方框对齐。
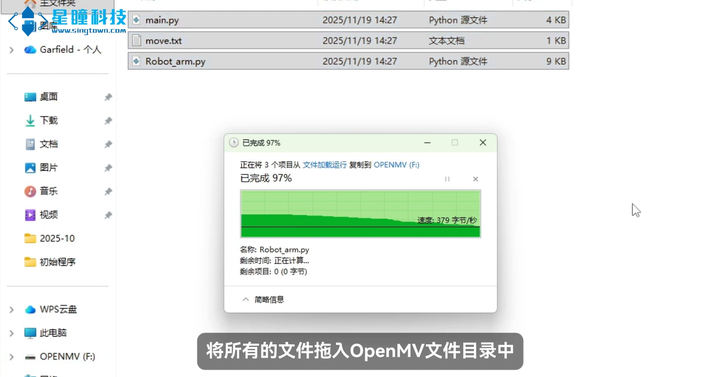
将本实战所需要的文件与代码拖入OpenMV文件目录中。
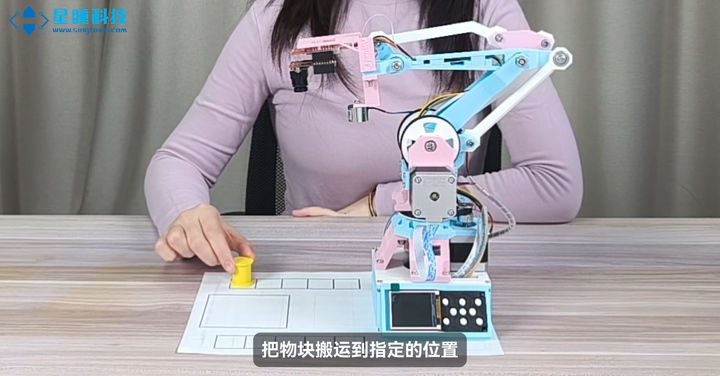
如图是物块的摆放位置,后续会使用按键示教的功能,控制机械臂抓取物块,并放置到指定位置
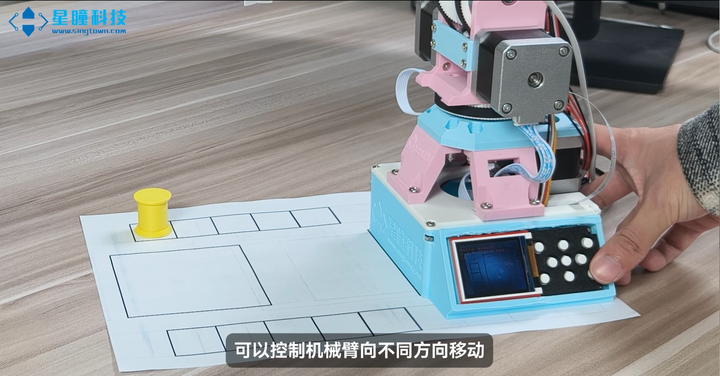
运行代码,按下不同的按键可以控制机械臂向不同方向移动
按键编号如图,功能如下:按键8-右转,按键2-左转,按键4-前移,按键6-后移,按键3-下移,按键9-上移,按键7-打开夹爪,按键1-闭合夹爪,按键5-单击保存、双击运行。

使用按键控制机械臂到达空间中一坐标点时,按下5号按键保存当前坐标

使用按键控制机械臂完成物块的搬运工作,并使用5号按键记录过程中的坐标点。 完成搬运后,手动将物块放回原位,按下两次5号按键开始示教回放。

move.txt中写有坐标信息: XYZ三轴的坐标,E滑轨的坐标,F为轴运行速度,S为舵机的角度。 运行代码,机械臂会按照move.txt文件中的内容进行运动。
修改move.txt中的内容,再运行代码,机械臂会按照move.txt文件中的新内容进行运动。
OpenMV Robot Arm机械臂的按键示教和利用txt文件控制机械臂的教程到此就结束啦。 结合OpenMV的智能图像识别,你可以实现更酷炫的项目。 源码和更多内容可在星瞳科技OpenMV官网OpenMV.cc查看,感谢观看!