多目标鲸鱼优化算法(Multi‑Objective Whale Optimization Algorithm, MOWOA )是基于单目标鲸鱼优化算法(WOA)扩展而来的多目标元启发式算法,核心是将座头鲸气泡网捕食行为与帕累托最优、非支配排序、外部存档等多目标优化机制融合,在平衡全局探索与局部开发的同时,高效逼近多目标优化问题(MOP)的帕累托最优前沿(PF)。其兼具WOA参数少、收敛快的优势,又适配多目标冲突场景,是工程与科学多目标优化的主流算法之一。
参考文献:
1I. R. Kumawat, S. J. Nanda and R. K. Maddila, "Multi-objective whale optimization," TENCON 2017 - 2017 IEEE Region 10 Conference, Penang, Malaysia, 2017, pp. 2747-2752, doi: 10.1109/TENCON.2017.8228329.
一、算法起源与生物学基础
1.1 单目标WOA核心原理
WOA由Mirjalili与Lewis于2016年提出,模拟座头鲸气泡网捕食的三类核心行为:
- 包围猎物:鲸鱼向当前最优解(猎物)收缩移动,通过收敛因子控制搜索范围。
- 气泡网攻击:以螺旋路径逼近猎物,同时收缩包围圈,实现局部精细搜索。
- 随机搜索:当探索需求大于开发时,随机选择个体引导搜索,避免局部最优。
1.2 MOWOA的扩展动机
单目标WOA仅优化单一目标,无法处理多目标冲突场景。MOWOA通过引入帕累托支配、非支配排序、外部存档、拥挤距离等机制,将单目标搜索逻辑升级为多目标协同优化,目标是获得一组均匀分布、收敛性强的帕累托最优解集。
二、MOP数学定义与核心概念
2.1 多目标优化问题(MOP)
minF(x)=(f1(x),f2(x),...,fM(x))Ts.t.x∈Ω⊆RD \begin{align*} \min \quad & \mathbf{F}(\mathbf{x}) = \left(f_1(\mathbf{x}), f_2(\mathbf{x}), \dots, f_M(\mathbf{x})\right)^T \\ \text{s.t.} \quad & \mathbf{x} \in \Omega \subseteq \mathbb{R}^D \end{align*} mins.t.F(x)=(f1(x),f2(x),...,fM(x))Tx∈Ω⊆RD
- x\mathbf{x}x:DDD维决策向量;Ω\OmegaΩ:决策空间;F(x)\mathbf{F}(\mathbf{x})F(x):MMM维目标向量(M≥2M\ge2M≥2),目标间通常冲突。
- 帕累托支配 :x1≺x2 ⟺ ∀i,fi(x1)≤fi(x2)∧∃j,fj(x1)<fj(x2)\mathbf{x}^1 \prec \mathbf{x}^2 \iff \forall i, f_i(\mathbf{x}^1) \le f_i(\mathbf{x}^2) \land \exists j, f_j(\mathbf{x}^1) < f_j(\mathbf{x}^2)x1≺x2⟺∀i,fi(x1)≤fi(x2)∧∃j,fj(x1)<fj(x2)。
- 帕累托最优解:不被任何解支配的解;其集合为帕累托最优集(PS),目标空间映射为PF。
2.2 MOWOA核心多目标机制
- 非支配排序:将种群按支配关系划分为不同层级,层级越高解质量越优。
- 拥挤距离:衡量目标空间中解的稀疏度,用于维持解集多样性。
- 外部存档(Archive):存储迭代中所有非支配解,作为全局最优引导集。
- 领导者选择:从外部存档中随机/按规则选取个体,替代单目标WOA的单一全局最优,引导多目标搜索。
三、MOWOA核心数学模型
3.1 基础参数定义
- 种群规模:NNN;迭代次数:ttt;最大迭代:TmaxT_{\text{max}}Tmax;决策维度:DDD;目标维度:MMM。
- 收敛因子:a=2−2t/Tmaxa = 2 - 2t/T_{\text{max}}a=2−2t/Tmax(随迭代从2线性降至0,控制探索‑开发平衡)。
- 随机向量:A=2ar1−a\mathbf{A} = 2a\mathbf{r}_1 - aA=2ar1−a(r1∈0,1\mathbf{r}_1 \in 0,1r1∈0,1,控制包围/随机搜索);C=2r2\mathbf{C} = 2\mathbf{r}_2C=2r2(r2∈0,1\mathbf{r}_2 \in 0,1r2∈0,1,权重系数)。
- 螺旋参数:bbb(常数,控制螺旋形状);l∈−1,1l \in -1,1l∈−1,1(随机数,控制螺旋步长);p∈0,1p \in 0,1p∈0,1(随机概率,选择气泡网攻击/包围策略)。
3.2 位置更新公式(核心)
MOWOA保留WOA的三类位置更新逻辑,但领导者从外部存档选取,而非单一全局最优:
-
包围猎物(p≤0.5p \le 0.5p≤0.5 且 ∣A∣≤1|\mathbf{A}| \le 1∣A∣≤1)
X(t+1)=X∗(t)−A⋅D \mathbf{X}(t+1) = \mathbf{X}^*(t) - \mathbf{A} \cdot \mathbf{D} X(t+1)=X∗(t)−A⋅D
D=∣C⋅X∗(t)−X(t)∣ \mathbf{D} = |\mathbf{C} \cdot \mathbf{X}^*(t) - \mathbf{X}(t)| D=∣C⋅X∗(t)−X(t)∣
X∗(t)\mathbf{X}^*(t)X∗(t):从外部存档随机选取的领导者解;D\mathbf{D}D:当前解与领导者的距离。 -
随机搜索(p≤0.5p \le 0.5p≤0.5 且 ∣A∣>1|\mathbf{A}| > 1∣A∣>1)
X(t+1)=Xr(t)−A⋅D \mathbf{X}(t+1) = \mathbf{X}_r(t) - \mathbf{A} \cdot \mathbf{D} X(t+1)=Xr(t)−A⋅D
D=∣C⋅Xr(t)−X(t)∣ \mathbf{D} = |\mathbf{C} \cdot \mathbf{X}_r(t) - \mathbf{X}(t)| D=∣C⋅Xr(t)−X(t)∣
Xr(t)\mathbf{X}_r(t)Xr(t):种群中随机选取的个体,增强全局探索。 -
气泡网螺旋攻击(p>0.5p > 0.5p>0.5)
X(t+1)=D′⋅ebl⋅cos(2πl)+X∗(t) \mathbf{X}(t+1) = \mathbf{D}' \cdot e^{bl} \cdot \cos(2\pi l) + \mathbf{X}^*(t) X(t+1)=D′⋅ebl⋅cos(2πl)+X∗(t)
D′=∣X∗(t)−X(t)∣ \mathbf{D}' = |\mathbf{X}^*(t) - \mathbf{X}(t)| D′=∣X∗(t)−X(t)∣
D′\mathbf{D}'D′:当前解与领导者的距离;螺旋路径实现局部精细开发。
四、标准MOWOA算法流程
步骤1:初始化
- 参数设置:N,Tmax,D,M,bN, T_{\text{max}}, D, M, bN,Tmax,D,M,b,决策变量上下界lb,ub\text{lb}, \text{ub}lb,ub。
- 种群初始化:随机生成NNN个初始解{Xi}i=1N\{\mathbf{X}i\}{i=1}^N{Xi}i=1N,计算目标向量F(Xi)\mathbf{F}(\mathbf{X}_i)F(Xi)。
- 外部存档初始化:筛选初始种群中的非支配解,存入外部存档Archive\text{Archive}Archive。
步骤2:迭代进化(循环至TmaxT_{\text{max}}Tmax)
- 参数更新 :计算a,A,C,l,pa, \mathbf{A}, \mathbf{C}, l, pa,A,C,l,p。
- 领导者选择 :从Archive\text{Archive}Archive中随机选取一个领导者X∗\mathbf{X}^*X∗。
- 位置更新 :对每个个体Xi\mathbf{X}_iXi,按p,∣A∣p, |\mathbf{A}|p,∣A∣选择包围/随机/螺旋策略更新位置,得到新解Xi′\mathbf{X}_i'Xi′,计算F(Xi′)\mathbf{F}(\mathbf{X}_i')F(Xi′)。
- 非支配排序与存档更新 :
- 合并原种群与新解,执行非支配排序,划分层级。
- 按层级+拥挤距离筛选非支配解,更新Archive\text{Archive}Archive(剔除被支配解,保留优质解)。
- 种群更新 :从Archive\text{Archive}Archive与新解中选取NNN个解,构成新一代种群。
步骤3:终止与输出
达到最大迭代次数后,输出外部存档Archive\text{Archive}Archive,作为MOP的帕累托最优近似解集。
五、关键技术模块解析
5.1 外部存档管理(核心)
- 存档维护 :每次迭代后,合并新旧解,执行非支配排序,仅保留非支配解;若存档溢出,按拥挤距离剔除密集区域解,维持多样性。
- 领导者选择策略 :
- 随机选择:简单高效,适配多数场景。
- 拥挤距离优先:选择拥挤距离大的解,提升解集均匀性。
- 分解引导:结合MOEA/D的权重向量,按偏好选择领导者,适配特定目标方向。
5.2 非支配排序与拥挤距离
- 非支配排序 :将解划分为F1,F2,...F_1, F_2, \dotsF1,F2,...层级,F1F_1F1为第一级非支配解(最优),后续层级依次被前一层级支配。
- 拥挤距离:计算每个解在目标空间中相邻解的目标差值之和,值越大表示解越稀疏,多样性越好;用于存档筛选与种群选择。
5.3 探索‑开发平衡机制
- 收敛因子aaa:迭代前期aaa大,A\mathbf{A}A易大于1,侧重随机搜索(探索);后期aaa小,A\mathbf{A}A易小于1,侧重包围与螺旋攻击(开发)。
- 概率ppp:控制气泡网攻击与包围的比例,默认p=0.5p=0.5p=0.5,可自适应调整以适配问题特性。
六、MOWOA应用
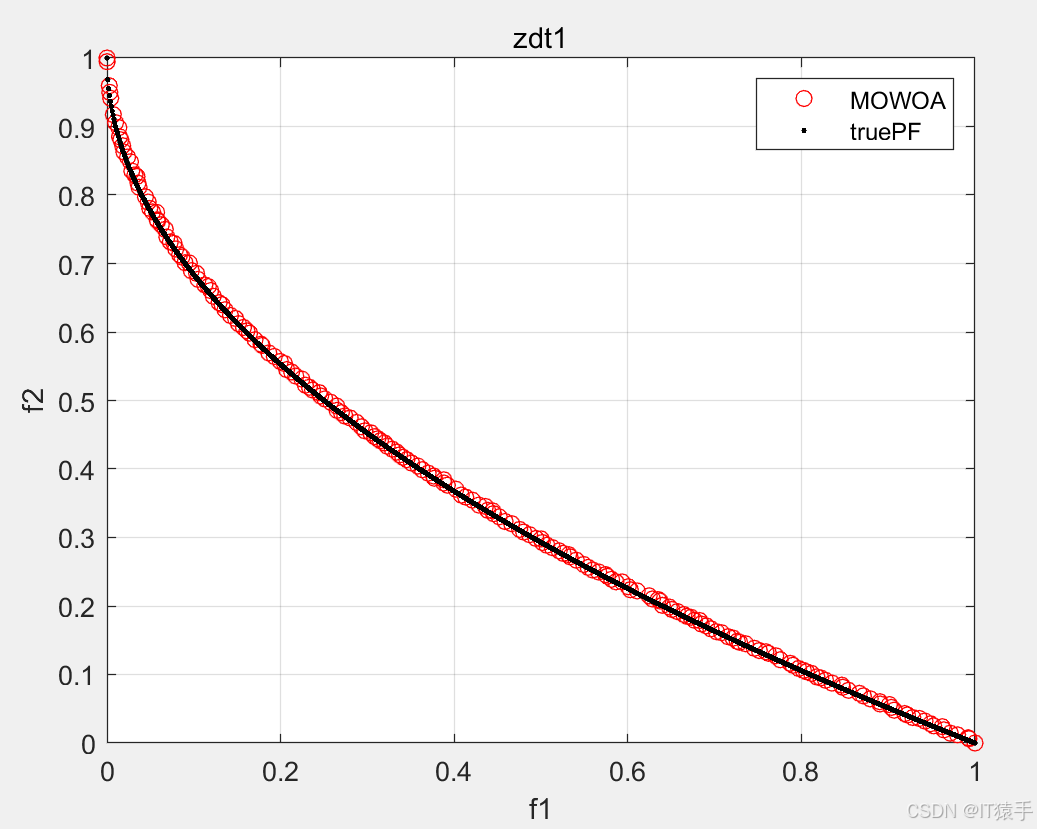
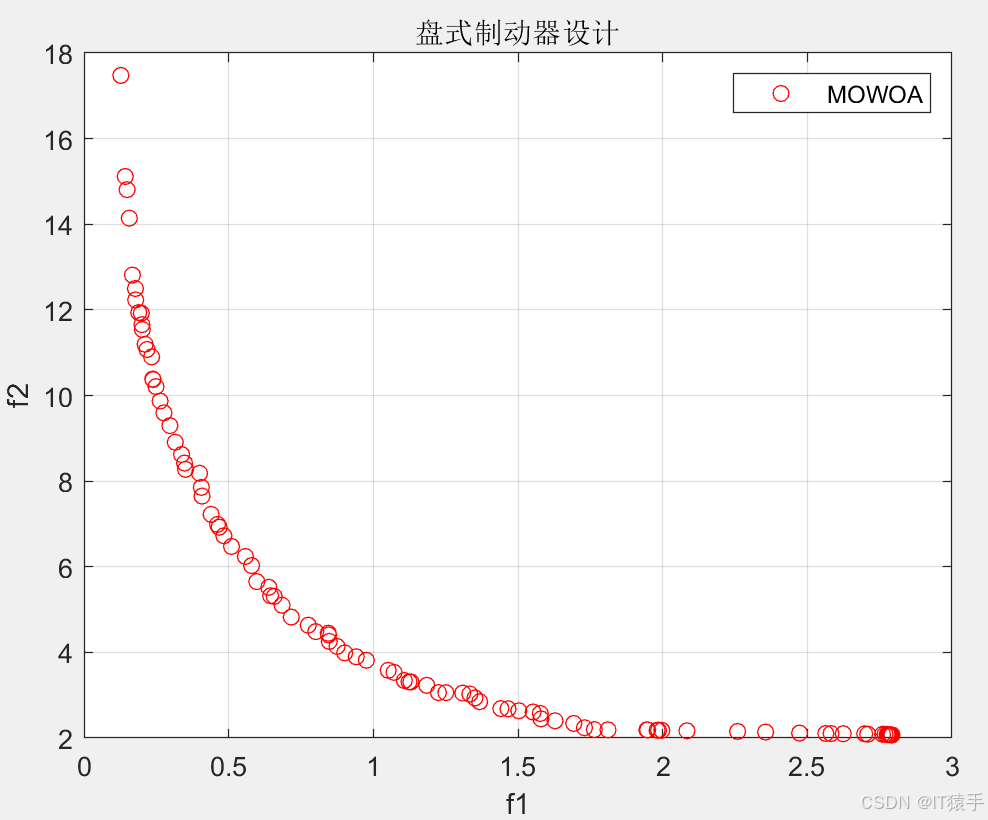
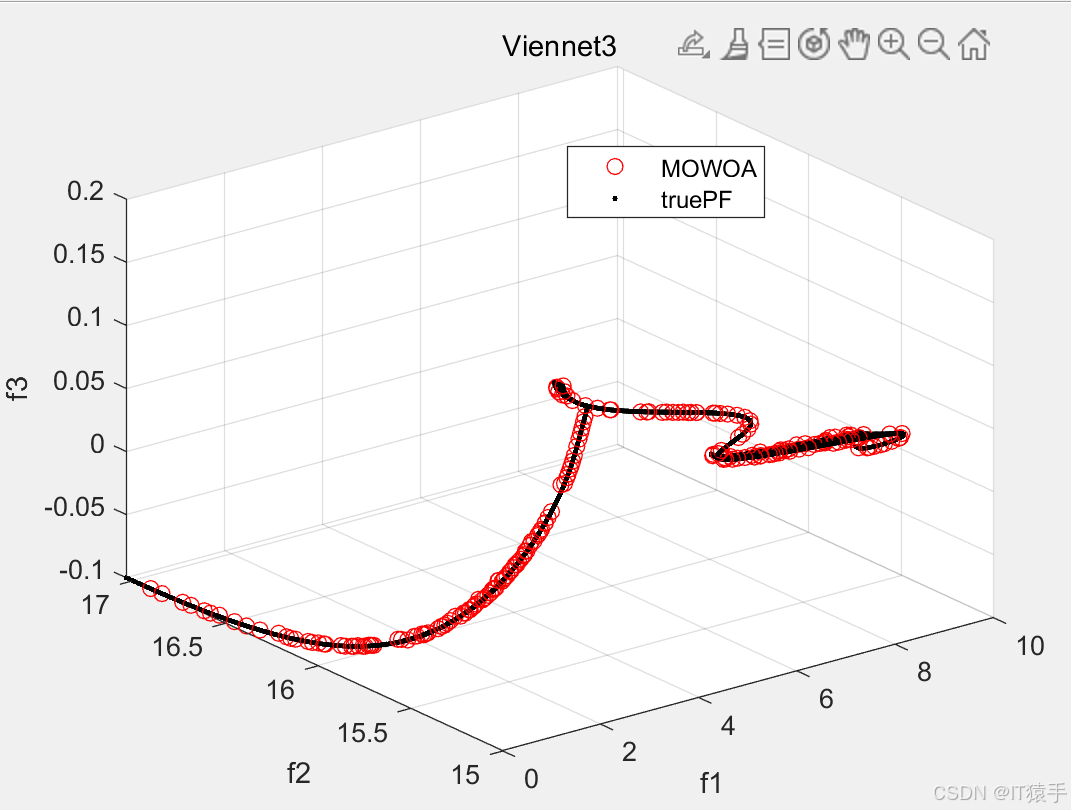
MOWOA用于求解46个多目标测试函数(ZDT1、ZDT2、ZDT3、ZDT4、ZDT6、DTLZ1-DTLZ7、WFG1-WFG10、UF1-UF10、CF1-CF10、Kursawe、Poloni、Viennet2、Viennet3)以及1个工程应用(盘式制动器设计),并采用IGD、GD、HV、SP进行评价。
6.1部分代码
bash
close all;
clear ;
clc;
%%
% TestProblem测试问题说明:
%一共46个多目标测试函数,详情如下:
%1-5:ZDT1、ZDT2、ZDT3、ZDT4、ZDT6
%6-12:DZDT1-DZDT7
%13-22:wfg1-wfg10
%23-32:uf1-uf10
%33-42:cf1-cf10
%43-46:Kursawe、Poloni、Viennet2、Viennet3
%47 盘式制动器设计 温泽宇,谢珺,谢刚,续欣莹.基于新型拥挤度距离的多目标麻雀搜索算法[J].计算机工程与应用,2021,57(22):102-109.
%%
TestProblem=47;%1-47
MultiObj = GetFunInfo(TestProblem);
MultiObjFnc=MultiObj.name;%问题名
% Parameters
params.Np = 100; % Population size
params.Nr = 100; % Repository size
params.maxgen =100; % Maximum number of generations
[x,f] = MOwoa(params,MultiObj);6.2部分结果