目录
本文研究了基于遗传优化(GA)算法的无刷直流电机PI控制器参数优化方法。GA算法设计了基于ITAE误差积分指标的适应度函数,综合评估系统动态和稳态性能。Matlab仿真结果表明,该方法能有效优化Kp、Ki参数,实现电机调速控制的多目标优化。完整工程文件可通过指定关键词获取,为相关领域研究提供了实用参考。
1.课题概述
无刷直流电机(BLDCM)具有高效率、高功率密度、无换向火花等优点,广泛用于伺服与调速系统。传统PI控制依赖人工整定参数,在负载扰动、参数摄动、转速突变时难以保持最优动态性能。遗传算法(GA)是模拟生物进化的全局优化算法,可在解空间中自动搜索最优PI参数组合,使系统响应超调小、响应快、稳态误差小、抗扰能力强,最终实现GA‑PI最优闭环控制。
2.系统仿真结果
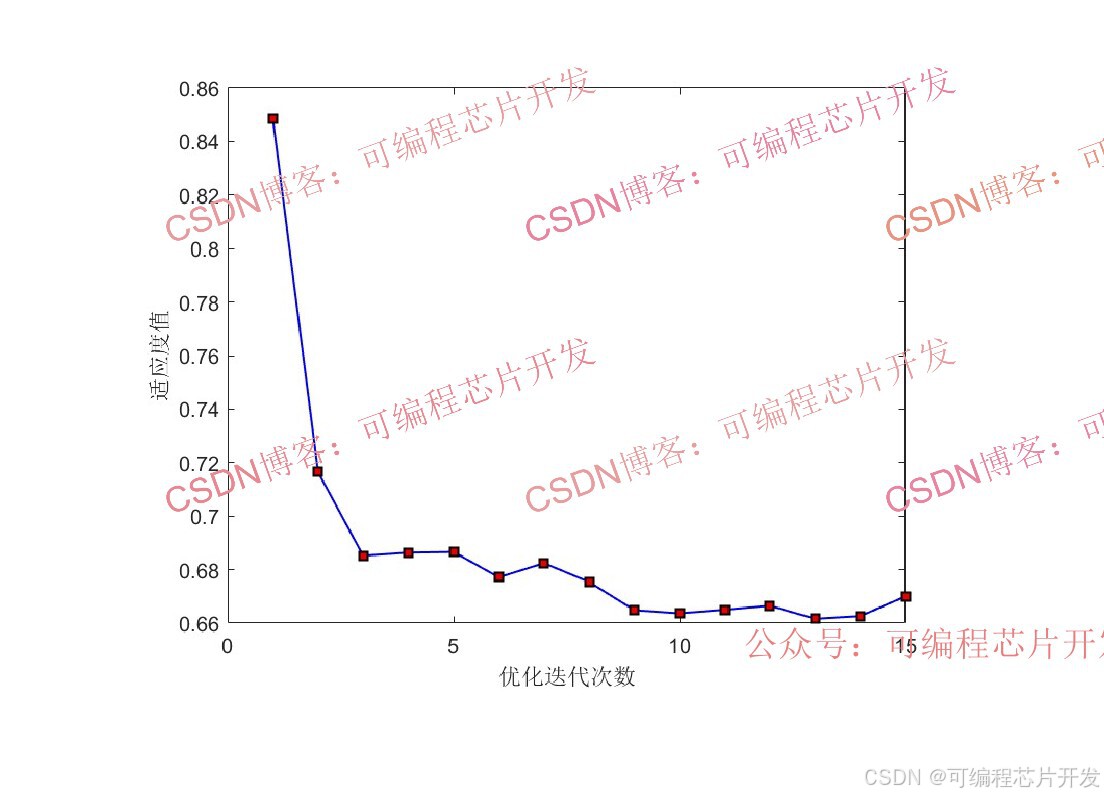
遗传算法的收敛过程:
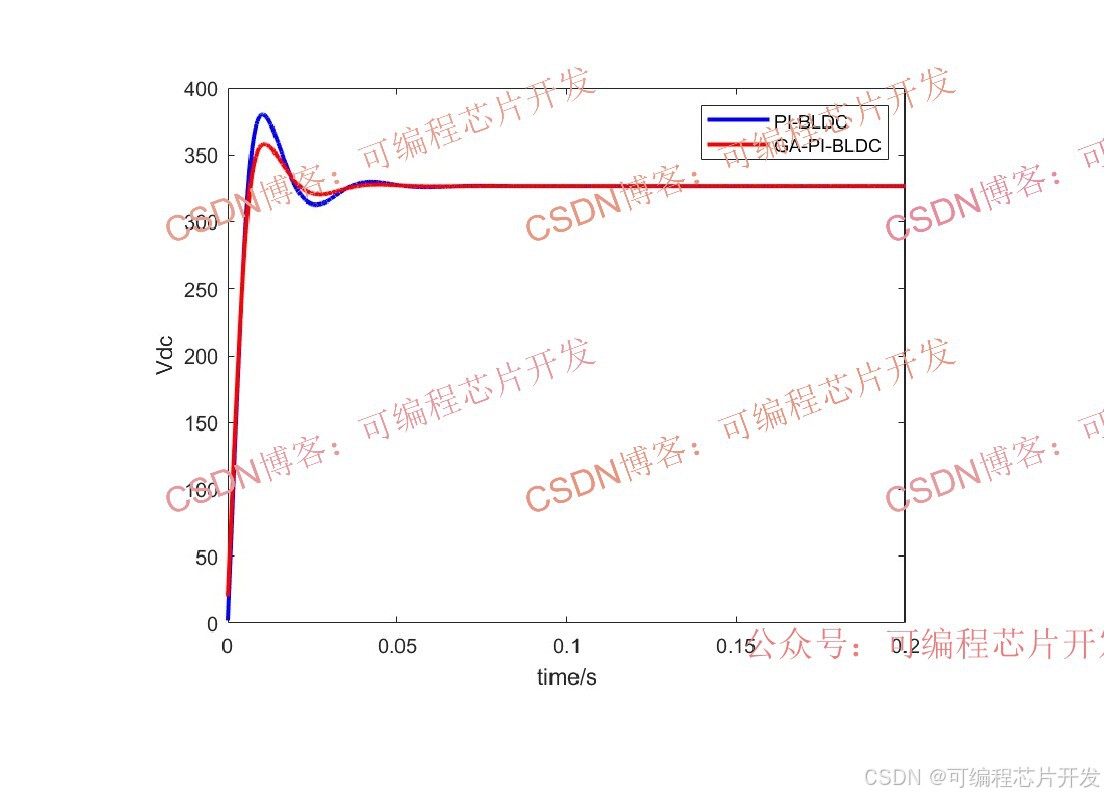
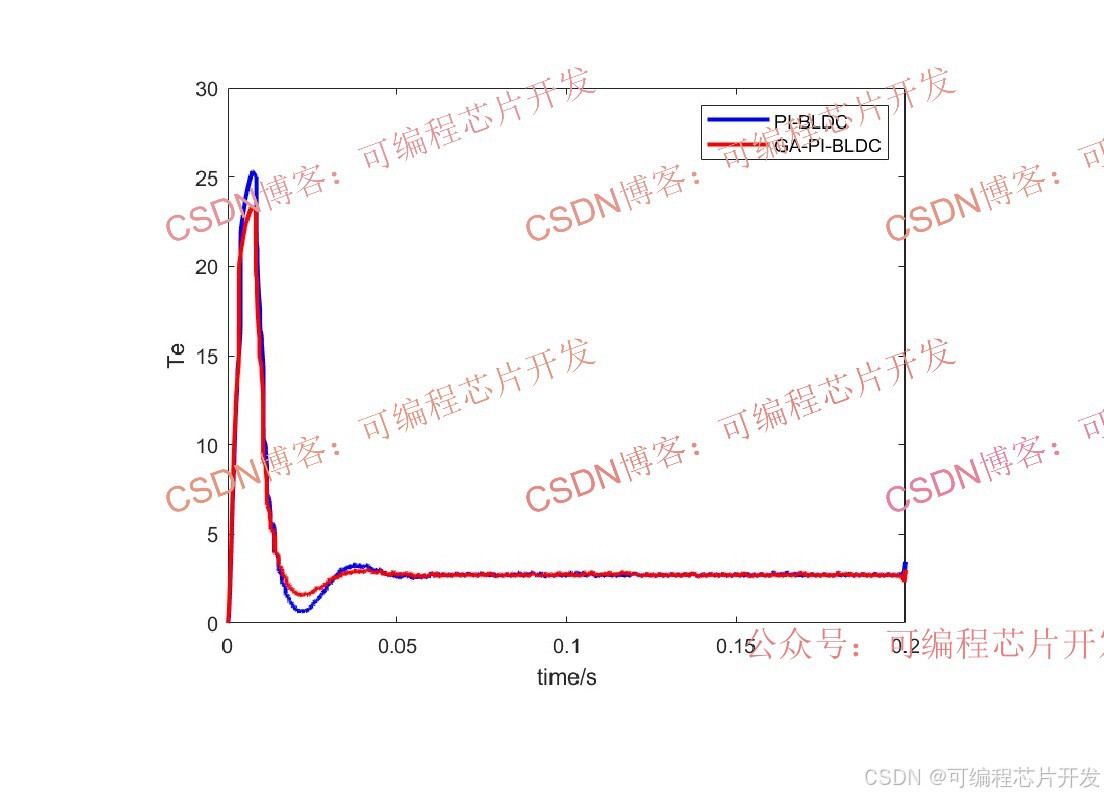
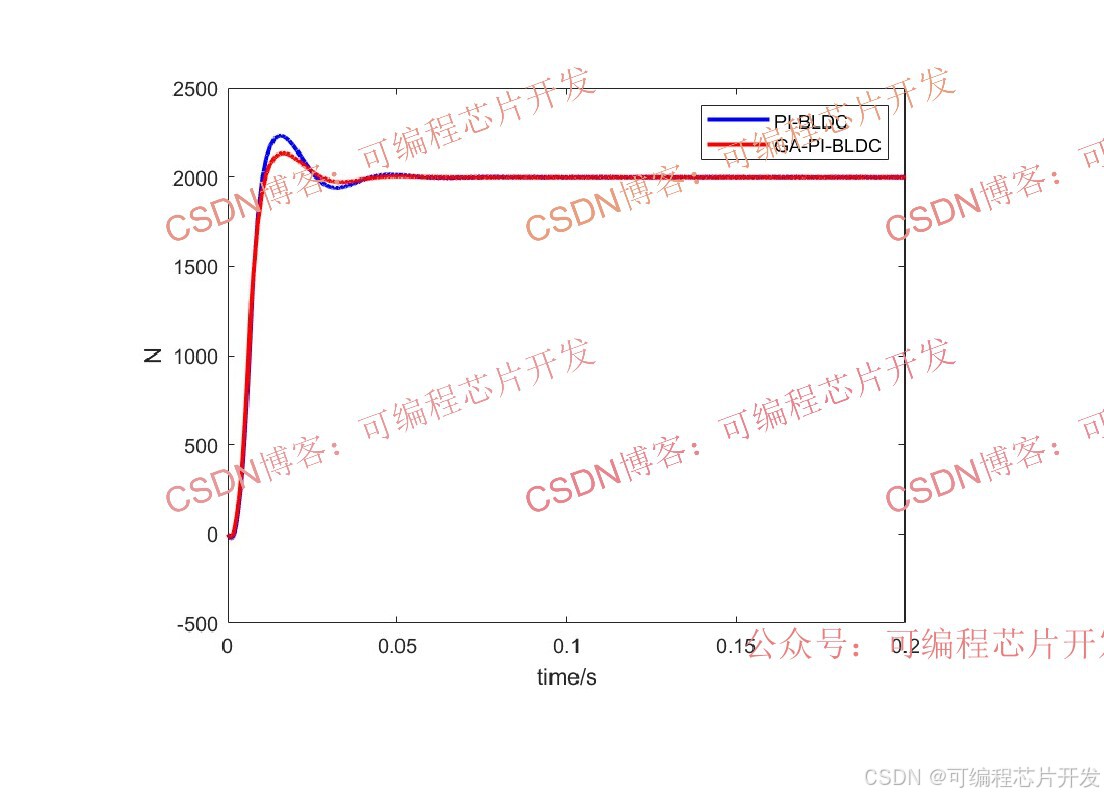
对比结果如下:
3.核心程序或模型
版本:Matlab2024b
for a=1:1:NIND
X = phen1(a,:);
%将变量导入到simulink模型中
Kp = X(i,1);
Ki = X(i,2);
sim('tops1_fit.slx');
%导入simulink仿真输出,计算适应度值
load Ref2.mat
Ref = ans.Data;
load N2.mat
Yout = ans.Data;
%计算对应的目标值
E = mean((Ref-Yout).^2);
JJ(a,1) = E/200000;
end
Objvsel=(JJ);
Chrom,Objv=reins(Chrom,Selch,1,1,Objv,Objvsel);
gen=gen+1;
Error2(gen) = mean(JJ);
end
figure;
plot(Error2,'-bs',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',0.9,0.0,0.0);
xlabel('优化迭代次数');
ylabel('适应度值');
%提取GA的优化结果
V,I = min(JJ);
X = phen1(I,:);
%将变量导入到simulink模型中
Kp=X(1);
Ki=X(2);
sim('tops1_pso.slx');
145
4.系统原理简介
本课题中,以BLDCM数学模型为被控对象,以PI为闭环控制器。
然后将PI参数优化转化为全局寻优问题。适应度函数是PSO寻优的评价标准,需综合衡量控制系统动态性能、稳态性能、抗扰性能,无刷直流电机调速控制常用误差积分型指标,最常用ITAE(时间乘绝对误差积分),兼顾响应速度、超调与稳态误差,表达式:

优化目标:最小化适应度函数值,对应控制系统性能最优。
GA通过编码、初始种群、适应度、选择、交叉、变异迭代得到最优Kp,Ki。
将最优参数用于数字控制,实现无刷直流电机快速、平稳、高精度、强抗扰的最优调速系统。
5.完整工程文件
v v
关注后,GZH回复关键词:a27
或回复关键词:GAPI