EP:engineer and Program
一、托盘位姿的识别方法
叉车行进至目标托盘附近,插取动作非常关键。一般都要先识别一下托盘的摆放位置,再做插取动作。具体的识别方法有很多种,主要有基于相机、基于多线激光雷达和基于RFID等方法。此处尝试了一种,依靠叉臂头部的接近开关完成识别的方法。具体操作流程如下图1所示:
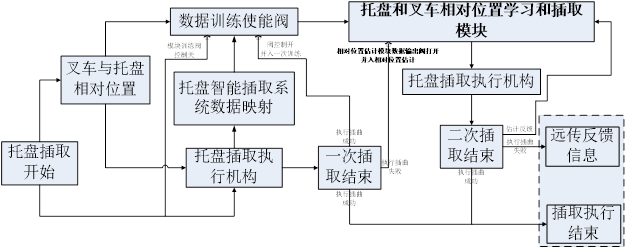
具体来说,叉车叉臂尾部会有接近开关(用于感知叉车插取对象时是否有障碍物),接近开关的识别障碍物的感知距离和灵敏度可调。
步骤一:
调节好合适的探测深度和灵敏度后,叉车到达待叉取位置,调整叉车位姿使叉臂对向托盘,如图2所示。
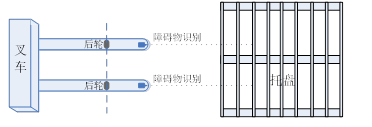
步骤二:
原地扭动叉车,同时记录两个叉臂接近开关的是否有障碍物,生成两个关于叉车摆动角(-85,+85)的障碍物障碍物分布带,如下图3所示。

步骤三:
得到叉臂叉尖接近开关的障碍物感知如上图,图中深色部分是接近开关感知到的障碍物分布图。顺带此时叉车旋转中心点到托盘中心点的距离,作为神经网络的输入,神经网络的输出为托盘相对叉车的位置和朝向。该神经网络为简单的向量机(BP神经网络),该神经网络的训练数据来自于实际叉车和托盘的采集和标注。
运行实况:
该方法能够较好的预测出托盘的朝向和相对位置,当托盘放置偏斜时,但是较近距离较大幅度的调整叉车的位置,插取成功率并不理想。