
一、适用场景
适用场景:红外遥控器解码(家电/小车/灯控)、菜单翻页与参数设置、低成本无线控制、学习红外通信协议(NEC / RC5 等)、嵌入式外部中断与定时器实战教学等。
二、器材清单
HX1838 红外接收头模块 ×1
红外遥控器(NEC 协议常见)×1
stm32f103开发板 ×1
若干杜邦线 ×1组
三、工作原理(要点)
HX1838 是一款 38kHz 调制红外信号接收头 , 输出的是 已解调的数字信号,MCU 无需再处理 38kHz 载波
NEC 协议是最常见的红外遥控协议之一,其时序特点:
引导码:
9ms 低电平 + 4.5ms 高电平
数据位(LSB 优先):
逻辑 0:560µs 低 + 560µs 高
逻辑 1:560µs 低 + 1.69ms 高
一帧数据共 32bit:
8bit 地址
8bit 地址反码
8bit 数据
8bit 数据反码

四、接线示意
GND → GND
VCC→ 5V/3.3V电源
标准库
S→ PB9
HAL库
S→ PA8
五、示例代码
标准库
cpp
#include "rmt.h"
//遥控器接收状态
//[7]:收到了引导码标志
//[6]:得到了一个按键的所有信息
//[5]:保留
//[4]:标记上升沿是否已经被捕获
//[3:0]:溢出计时器
u8 RmtSta=0;
u16 Dval; //下降沿时计数器的值
u32 RmtRec=0; //红外接收到的数据
u8 RmtCnt=0; //按键按下的次数
int mask=0,num_flag=0,cnt=0,cout=0;
u8 temp=0;
void Remote_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //使能PORTB时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE); //TIM4 时钟使能
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PB9 输入
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //上拉输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// GPIO_SetBits(GPIOB,GPIO_Pin_9); //初始化GPIOB.9
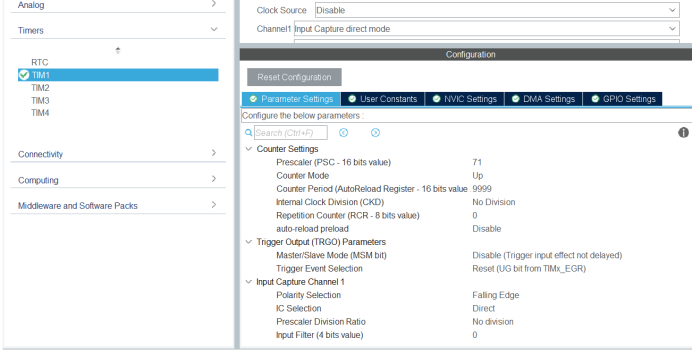
TIM_TimeBaseStructure.TIM_Period = 10000; //设定计数器自动重装值 最大10ms溢出
TIM_TimeBaseStructure.TIM_Prescaler =(72-1); //预分频器,1M的计数频率,1us加1.
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx
TIM_ICInitStructure.TIM_Channel = TIM_Channel_4; // 选择输入端 IC4映射到TI4上
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频
TIM_ICInitStructure.TIM_ICFilter = 0x03;//IC4F=0011 配置输入滤波器 8个定时器时钟周期滤波
TIM_ICInit(TIM4, &TIM_ICInitStructure);//初始化定时器输入捕获通道
TIM_Cmd(TIM4,ENABLE); //使能定时器4
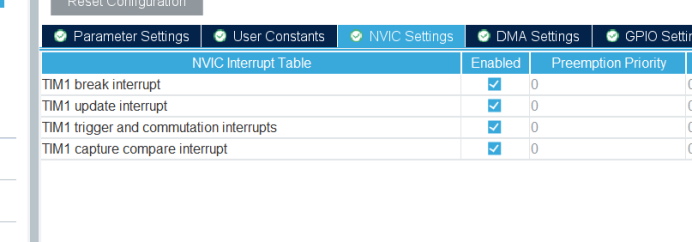
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
TIM_ITConfig( TIM4,TIM_IT_Update|TIM_IT_CC4,ENABLE);//允许更新中断 ,允许CC4IE捕获中断
}
u8 Remote_Scan(void)//获取键值
{
u8 sta=0;
u8 t1,t2;
if(RmtSta&(1<<6))//得到一个按键的所有信息了
{
t1=RmtRec>>24; //得到地址码
t2=(RmtRec>>16)&0xff; //得到地址反码
if(t1==((u8)~t2))//检验遥控地址
{
t1=RmtRec>>8;
t2=RmtRec;
if(t1==(u8)~t2)sta=t1;//键值正确
}
if((sta==0)||((RmtSta&0X80)==0))//遥控没有按下了/按键数据错误(没有引导码)
{
RmtSta&=~(1<<6);//清除接收到有效按键标识
// RmtCnt=0; //清除按键次数计数器,是为了重复码
}
}
return sta;
}
void init_ALL(void)
{
USART_Config();
SysTick_Init(); //初始化滴答计时器
Remote_Init(); //红外按键初始化
}
void TIM4_IRQHandler(void)
{
if(TIM_GetITStatus(TIM4,TIM_IT_Update)!=RESET)//计时器更新中断
{
cnt++;
if(cnt > 100)//超时就去获取键码值并打开显示标志位
{
cnt=0;
temp=Remote_Scan();
if(temp!=0)
num_flag=1;
}
if((RmtSta&0x40) != 0 ) //引导码不为空,表示上次有数据被接收到了,在空闲的情况下就需要将上次的数据位清除,如果有数据也是先执行完上面的显示函数才会到下面清除标记位,所以不用担心会其冲突
{
RmtSta&=~0X10; //取消上升沿已经被捕获标记
RmtSta&=~(1<<7); //清空引导标识
// RmtSta&=0XF0; //清空计数器,是为了重复码
}
}
if(TIM_GetITStatus(TIM4,TIM_IT_CC4)!=RESET)//捕获中断
{
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_9)==SET)//上升沿捕获
{
TIM_OC4PolarityConfig(TIM4,TIM_ICPolarity_Falling); //CC4P=1 设置为下降沿捕获
TIM_SetCounter(TIM4,0); //清空定时器值
RmtSta|=0x10; //标记上升沿已经被捕获
}
else //下降沿捕获
{
Dval=TIM_GetCapture4(TIM4); //读取CCR4也可以清CC4IF标志位,获取高电平的时间
TIM_OC4PolarityConfig(TIM4,TIM_ICPolarity_Rising); //CC4P=0 设置为上升沿捕获
if(RmtSta&0X10) //如果已经完成一次高电平捕获
{
if(RmtSta&0X80)//接收到了引导码
{
if(Dval>300&&Dval<800) //560为标准值,560us
{
RmtRec<<=1; //左移一位.
RmtRec|=0; //接收到0
}
else if(Dval>1400&&Dval<1800) //1680为标准值,1680us
{
RmtRec<<=1; //左移一位.
RmtRec|=1; //接收到1
}
// else if(Dval>2200&&Dval<2600) //得到按键键值增加的信息 2500为标准值2.5ms
// {
// RmtCnt++; //按键次数增加1次
// RmtSta&=0XF0; //清空计时器
// }
cout++;//统计目前获取多少位数据
if(cout>32)//获取到32位数据
{
cout=0;
RmtSta|=0x40;
Usart_SendString(USART1,"ok\n");
}
}
else if(Dval>4200&&Dval<4700) //4500为标准值4.5ms
{
RmtSta|=1<<7; //标记成功接收到了引导码
// RmtCnt=0; //清除按键次数计数器,是为了重复码
}
}
RmtSta&=~(1<<4);//取消上升沿已经被捕获标记
}
}
TIM_ClearITPendingBit(TIM4,TIM_IT_Update|TIM_IT_CC4);
}
#include "stm32f10x.h"
#include "stdio.h"
#include "rmt.h"
#include "bsp_SysTick.h"
#include "bsp_usart.h"
extern u8 RmtSta,temp;
extern int num_flag;
char show[20];
int main(void)
{
init_ALL();
while(1)
{
if(num_flag==1)//1s后显示数据
{
num_flag=0;
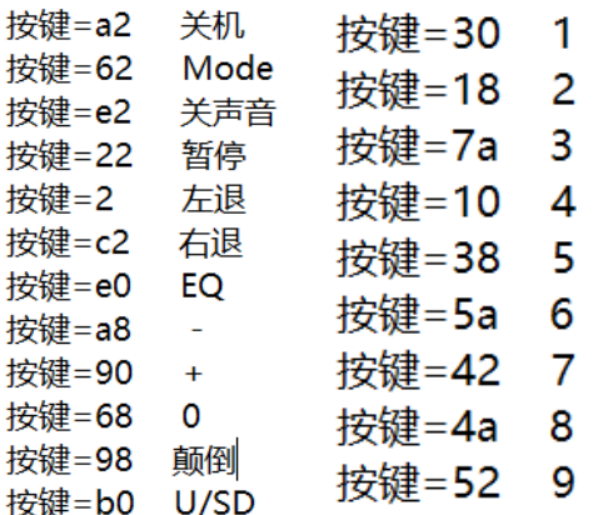
sprintf(show,"编码=%d,按键=%x\r\n",temp,temp);
Usart_SendString(USART1,show);
}
}
}HAL库
cpp
#include "HX1838.h"
#include "main.h"
#include "stm32f1xx_hal.h"
#include <string.h>
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
extern TIM_HandleTypeDef htim1;
#define RX_DBG_EN 0
#define RX_SEQ_NUM 33
#if RX_DBG_EN
#define RX_DBG(format, ...) printf(format, ##__VA_ARGS__)
#else
#define RX_DBG(format, ...) ;
#endif
static uint8_t tim_udt_cnt = 0;
static uint8_t cap_pol = 0;
static uint8_t cap_pulse_cnt = 0;
static uint8_t sta_idle = 1;
static uint8_t cap_frame = 0;
static uint16_t rx_frame[RX_SEQ_NUM*2] = {0};
struct {
uint16_t src_data[RX_SEQ_NUM*2];
uint16_t repet_cnt;
union{
uint32_t rev;
struct
{
uint32_t key_val_n:8;
uint32_t key_val :8;
uint32_t addr_n :8;
uint32_t addr :8;
}_rev;
}data;
}rx;
extern UART_HandleTypeDef huart2;
char show[65]={0};
uint8_t appro(int num1,int num2)
{
return (abs(num1-num2) < 300);
}
void rx_rcv_init(void)
{
cap_frame = 0; //未捕获到新数据
sta_idle = 0; //非空闲状态
tim_udt_cnt = 0; //定时器溢出清0
cap_pulse_cnt = 0; //捕获到的计数清0
memset(rx_frame,0x00,sizeof(rx_frame));
}
void hx1838_cap_start(void)
{
HAL_TIM_Base_Start_IT(&htim1);
HAL_TIM_IC_Start_IT(&htim1,TIM_CHANNEL_1);
}
void HX1838_demo(void)
{
hx1838_cap_start();//定时器1通道1,输入捕获启动
while(1)
{
if(cap_frame)//标记捕获到新的数据
{
hx1838_proc(hx1838_data_decode());//解析数据
cap_frame = 0;
}
}
}
//根据键码值显示
void hx1838_proc(uint8_t res)
{
if(res == 0)
{
return;
}
if(res == 2)
{
return;
}
switch(rx.data._rev.key_val)
{
case 162:
HAL_UART_Transmit(&huart2, "1\r\n", 3, HAL_MAX_DELAY);
break;
case 98:
HAL_UART_Transmit(&huart2, "2\r\n", 3, HAL_MAX_DELAY);
break;
case 226:
HAL_UART_Transmit(&huart2, "3\r\n", 3, HAL_MAX_DELAY);
break;
case 34:
HAL_UART_Transmit(&huart2, "4\r\n", 3, HAL_MAX_DELAY);
break;
case 2:
HAL_UART_Transmit(&huart2, "5\r\n", 3, HAL_MAX_DELAY);
break;
case 194:
HAL_UART_Transmit(&huart2, "6\r\n", 3, HAL_MAX_DELAY);
break;
case 224:
HAL_UART_Transmit(&huart2, "7\r\n", 3, HAL_MAX_DELAY);
break;
case 168:
HAL_UART_Transmit(&huart2, "8\r\n", 3, HAL_MAX_DELAY);
break;
case 144:
HAL_UART_Transmit(&huart2, "9\r\n", 3, HAL_MAX_DELAY);
break;
case 152:
HAL_UART_Transmit(&huart2, "0\r\n", 3, HAL_MAX_DELAY);
break;
case 104:
HAL_UART_Transmit(&huart2, "*\r\n", 3, HAL_MAX_DELAY);
break;
case 176:
HAL_UART_Transmit(&huart2, "#\r\n", 3, HAL_MAX_DELAY);
break;
case 24:
HAL_UART_Transmit(&huart2, "^\r\n", 3, HAL_MAX_DELAY);
break;
case 16:
HAL_UART_Transmit(&huart2, "<\r\n", 3, HAL_MAX_DELAY);
break;
case 74:
HAL_UART_Transmit(&huart2, "v\r\n", 3, HAL_MAX_DELAY);
break;
case 90:
HAL_UART_Transmit(&huart2, ">\r\n", 3, HAL_MAX_DELAY);
break;
case 56:
HAL_UART_Transmit(&huart2, "ok\r\n", 4, HAL_MAX_DELAY);
break;
default:
break;
}
}
/* 溢出中断回调函数 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(TIM1 == htim->Instance)
{
if(sta_idle) //空闲状态,不作任何处理
{
return;
}
tim_udt_cnt++; //溢出一次
if(tim_udt_cnt == 3) //溢出3次
{
tim_udt_cnt = 0; //溢出次数清零
sta_idle = 1; //这是为空闲状态
cap_frame = 1; //标记捕获到新的数据
}
}
}
/* 电平捕获中断回调 */
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
static uint16_t tmp_cnt_l,tmp_cnt_h;
if(TIM1 == htim->Instance)
{
switch(cap_pol) //根据极性标志位判断捕获是低电平还是高电平
{
/* 捕获到下降沿 */
case 0:
tmp_cnt_l = HAL_TIM_ReadCapturedValue(&htim1,TIM_CHANNEL_1); //记录当前时刻
TIM_RESET_CAPTUREPOLARITY(&htim1, TIM_CHANNEL_1); //复位极性配置
TIM_SET_CAPTUREPOLARITY(&htim1, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING); //改变极性
cap_pol = 1; //极性标志位改为上升沿
if(sta_idle) //如果当前为空闲状态,空闲捕获到的时序,为第一个下降沿
{
rx_rcv_init();
break; //返回
}
rx_frame[cap_pulse_cnt] = tim_udt_cnt * 10000 + tmp_cnt_l - tmp_cnt_h; //与上次捕获的计时作差,记录值
tim_udt_cnt = 0;
// sprintf(show,"(%2d)%4d us:H\r\n",cap_pulse_cnt,rx_frame[cap_pulse_cnt]);
// HAL_UART_Transmit(&huart2, show, strlen(show), HAL_MAX_DELAY);
//溢出次数清0
//DBG:打印捕获到的电平及其时长
cap_pulse_cnt++; //计数++
break;
/* 捕获到上升沿 */
case 1:
tmp_cnt_h = HAL_TIM_ReadCapturedValue(&htim1,TIM_CHANNEL_1);
TIM_RESET_CAPTUREPOLARITY(&htim1, TIM_CHANNEL_1);
TIM_SET_CAPTUREPOLARITY(&htim1, TIM_CHANNEL_1, TIM_ICPOLARITY_FALLING);
cap_pol = 0;
if(sta_idle)
{
rx_rcv_init();
break;
}
rx_frame[cap_pulse_cnt] = tim_udt_cnt * 10000 + tmp_cnt_h - tmp_cnt_l;
tim_udt_cnt = 0;
// sprintf(show,"(%2d)%4d us:L\r\n",cap_pulse_cnt,rx_frame[cap_pulse_cnt]);
// HAL_UART_Transmit(&huart2, show, strlen(show), HAL_MAX_DELAY);
cap_pulse_cnt++;
break;
default:
break;
}
}
}
//数据解码
uint8_t hx1838_data_decode(void)
{
memcpy(rx.src_data,rx_frame,RX_SEQ_NUM*4);
memset(rx_frame,0x00,RX_SEQ_NUM*4);
// HAL_UART_Transmit(&huart2, "========= rx.src[] =================\r\n", strlen("========= rx.src[] =================\r\n"), HAL_MAX_DELAY);
// for(uint8_t i = 0;i<=(RX_SEQ_NUM*2);i++)
// {
// sprintf(show,"[%d]%d\r\n",i,rx.src_data[i]);
// HAL_UART_Transmit(&huart2, show, strlen(show), HAL_MAX_DELAY);
// }
HAL_UART_Transmit(&huart2, "========= rx.rec =================\r\n", strlen("========= rx.rec =================\r\n"), HAL_MAX_DELAY);
if(appro(rx.src_data[0],9000) && appro(rx.src_data[1],4500)) //#1. 检测前导码,9ms,4.5ms
{
uint8_t tmp_idx = 0;
rx.repet_cnt = 0; //按键重复个数清0
for(uint8_t i = 2;i<(RX_SEQ_NUM*2);i++) //#2. 检测数据
{
if(!appro(rx.src_data[i],560))
{
sprintf(show,"%d,err:%d != 560\r\n",i,rx.src_data[i]);
HAL_UART_Transmit(&huart2, show, strlen(show), HAL_MAX_DELAY);
return 0;
}
i++;
if(appro(rx.src_data[i],1680))
{
rx.data.rev |= (0x80000000 >> tmp_idx); //第 tmp_idx 为置1
tmp_idx++;
}
else if(appro(rx.src_data[i],560))
{
rx.data.rev &= ~(0x80000000 >> tmp_idx); //第 tmp_idx 位清0
tmp_idx++;
}
else
{
sprintf(show,"%d,err:%d != 560||1680\r\n",i,rx.src_data[i+1]);
HAL_UART_Transmit(&huart2, show, strlen(show), HAL_MAX_DELAY);
return 0;
}
}
}
else if(appro(rx.src_data[0],9000) && appro(rx.src_data[1],2250) && appro(rx.src_data[2],560))
{
rx.repet_cnt++;
return 2;
}
else
{
HAL_UART_Transmit(&huart2, "前导码检测错误\r\n", strlen("前导码检测错误\r\n"), HAL_MAX_DELAY);
return 0;
}
return 1;
}
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM1_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
HX1838_demo();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
HX1838_demo();//调用红外接收并显示
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}六、讲解视频