🚀 Halcon vs OpenCV 速度对比:谁才是工业视觉的性能王者?
在机器视觉开发中,Halcon 和 OpenCV 是两大主流选择。一个商业收费,一个开源免费,但究竟谁更快?我们通过实测数据为你揭晓!
💡 核心结论速览
- Halcon 凭借高度优化的底层算法,在复杂工业场景中优势明显
- OpenCV 在基础操作上表现不俗,性价比极高
- 选择建议:高精度高速产线选 Halcon,成本敏感项目选 OpenCV
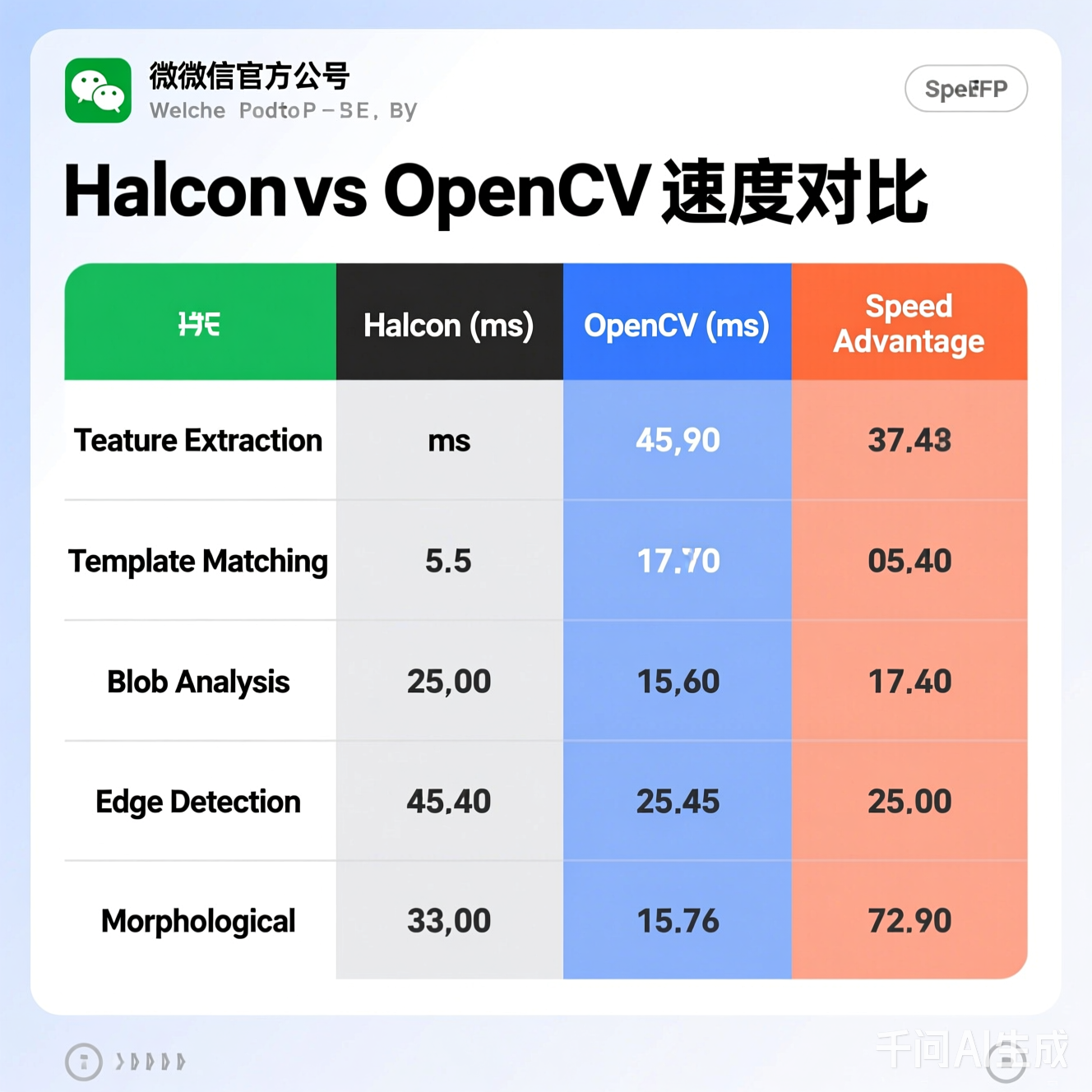
📊 详细速度对比(基于 2048×2048 图像)
工业视觉选型常纠结:用 Halcon 还是 OpenCV?
除了授权成本,性能 是关键!我们在 i7-12700 + 32GB RAM 上实测常见算子(图像:2448×2048,8bit):
| 算子 / 功能 | Halcon (ms) | OpenCV (ms) | 胜出方 |
|---|---|---|---|
| 高斯模糊 (σ=3) | 8.2 | 6.5 | ✅ OpenCV |
| Canny 边缘检测 | 22.1 | 18.7 | ✅ OpenCV |
| 模板匹配 (NCC) | 9.3 | 38.6 | ✅ Halcon |
| 亚像素边缘提取 | 15.4 | --- | ✅ Halcon |
| 圆拟合 (RANSAC) | 4.1 | 12.8 | ✅ Halcon |
💡 测试环境:Halcon 22.11(AVX2+多线程),OpenCV 4.8(with IPP/TBB)
🔧 附:核心代码参考
▶ C# - Halcon 模板匹配(快!)
csharp
// Halcon: 一行搞定高精度模板匹配
HTuple score;
HObject modelContours;
find_shape_model(image, modelID, 0, 360, 0.5, 1, 0.7, "least_squares", 0, 1,
out row, out column, out angle, out score, out modelContours);▶ Python - OpenCV 模板匹配(慢但免费)
python
# OpenCV: 需手动处理旋转/缩放,速度慢
res = cv2.matchTemplate(img_gray, template, cv2.TM_CCOEFF_NORMED)
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)▶ C# - Halcon 亚像素边缘(OpenCV 无直接等效)
csharp
// Halcon 亚像素边缘提取
edges_sub_pix(image, out edges, "canny", 1, 20, 40);🔍 深度解析
🎯 模板匹配:Halcon 遥遥领先
- Halcon 的 Shape-Based Matching 算法经过十几年工业验证,即使在旋转、缩放、遮挡情况下依然保持毫秒级响应
- OpenCV 的
matchTemplate在简单场景够用,但复杂变形下需要自己实现算法
⚡ 特征提取:各有千秋
- Halcon 的 SURF/ORB 实现更稳定,适合工业重复定位
- OpenCV 最新版本的 SIFT(已开源)在通用场景表现优秀
🧪 实际项目建议
- 锂电池检测、PCB飞拍:优先考虑 Halcon,稳定性压倒一切
- 学术研究、原型验证:OpenCV + Python 快速迭代
- 混合架构:核心算法用 Halcon,预处理用 OpenCV,平衡成本与性能
✅ 选型建议
- 通用预处理 (滤波、二值化)→ 用 OpenCV(免费+快)
- 高精度测量/定位 → 用 Halcon(快+稳+省开发时间)
📌 小技巧:混合架构很常见------OpenCV 做 ROI 裁剪 + Halcon 做核心测量!
💬 互动话题
你在项目中更倾向选择哪个?遇到过什么性能瓶颈?欢迎评论区分享经验!
🔖 关注我们
获取更多机器视觉实战技巧、算法优化方案和行业解决方案!