基于STM32的罐装水泥成分实时检测系统设计与实现
一. 引言
在水泥生产流程中,罐装环节是成品出厂的最后一道关口。
目前,大多数企业仍采用"人工取样+实验室离线分析"的质量控制模式。这种模式存在显著的滞后性(通常滞后2-4小时)和间断性,导致当发现质量不合格时,已产生大量废品。
此外,罐装现场具有粉尘浓度高、设备振动强、物料流动连续等恶劣工况特点,这对检测设备的稳定性提出了极高要求。为了解决这一痛点,本文提出了一种基于STM32F103C8T6和电容传感技术的低成本、高稳定性实时检测方案。
二. 系统总体设计方案
1. 技术路线对比与选型
在工业成分检测中,常见的技术包括光谱、微波、射线和电容检测。经过综合对比,选定了电容检测法作为核心技术,理由如下表所示:
| 检测技术 | 优势 | 劣势 | 适配性 |
|---|---|---|---|
| 光谱检测 | 精度高,多成分 | 易受粉尘污染,成本极高 | ✘ 不适合高粉尘环境 |
| 微波检测 | 穿透力强 | 易受电磁干扰,调试难 | △ 需复杂屏蔽 |
| 射线检测 | 精度高 | 有辐射风险,审批难 | ✘ 安全性差 |
| 电容检测 | 成本低,抗振动,耐粉尘 | 易受温湿度影响(可算法补偿) | ✔ 最佳选择 |
2. 系统架构
系统采用"现场检测层-数据处理层-远程监控层"的三层架构:
- 感知层: 电容水分传感器 + 温湿度传感器。
- 控制层: STM32嵌入式开发板(负责采集、滤波、计算)。
- 传输层: RS485总线(抗干扰远距离传输)。
- 监控层: 上位机PC(数据显示、存储、报警)。
3. 硬件电路设计
(1). 核心器件选型
- 主控芯片: STM32F103C8T6。基于ARM Cortex-M3内核,主频72MHz,自带12位ADC,拥有丰富的UART接口,适合工业控制。
- 水分传感器: CSF10电容式传感器。输出4-20mA标准信号,探头采用耐磨陶瓷材质(IP67防护),专门针对粉体物料设计。
- 环境传感器: DHT22。用于采集现场温湿度,辅助进行环境补偿,数字信号输出,抗干扰能力强。
- 通信模块: MAX485。用于构建RS485总线网络,确保在电磁干扰严重的环境下数据传输稳定。
(2). 硬件抗干扰设计
针对罐装现场的恶劣环境,硬件设计采取了以下措施:
- 传感器防护: 探头加装耐磨陶瓷套管,连接处采用双层密封(硅胶+金属压环),彻底阻隔粉尘。
- 电路屏蔽: 控制柜采用金属屏蔽并接地(<4Ω),强弱电线分离布线(间距>15cm)。
- 信号调理: 使用PT100模块将传感器的4-20mA电流信号转换为STM32可采集的0-3.3V电压信号,并加入RC滤波电路。
4. 软件算法设计
软件部分是解决检测精度的核心,主要包含数据采集、预处理、补偿计算和异常判断四个环节。
(1). 数据采集(DMA模式)
为了避免CPU占用过高影响实时性,ADC采集配置为DMA模式。
- 频率: 10Hz(每100ms采集一次)。
- 通道: ADC1_Channel0。
(2). 数据预处理算法
原始数据包含大量由振动和电磁干扰引起的噪声,采用"三级处理法":
- 异常点剔除(3σ准则): 剔除由瞬间剧烈振动引起的极大或极小值(野点)。
- 滑动平均滤波: 设置窗口大小 N=5 ,对数据进行平滑处理,消除随机噪声。
- 数据归一化: 将不同量纲的数据映射到区间,消除量纲影响。
(3). 温湿度补偿模型
电容值受环境温湿度影响较大,直接测量误差大。系统引入DHT22数据,利用多元线性回归算法建立补偿模型,消除环境漂移。
(4). 水分含量计算与异常报警
建立电容值-水分含量线性模型:
W=kY+bW=kY+bW=kY+b
其中,W 为水分含量, Y 为补偿后的电容值。
防误报逻辑(趋势分析):
为了避免瞬时波动误触发报警,设计了逻辑:只有当连续5次采样中,有3次以上超过设定阈值(如5%)时,才判定为"水分超标"并触发声光报警。
(5). 实验测试与结果分析
在实验室搭建了模拟罐装工况的测试平台,模拟粉尘浓度800mg/m³,振动频率30Hz的恶劣环境。
主要性能指标测试结果:
| 测试项目 | 设计指标 | 实测结果 | v |
|---|---|---|---|
| 静态精度 | ≤ ±0.5% | ≤ 0.03% | 远超国标要求 |
| 动态响应 | ≤ 1s | 0.8s | 实时性好 |
| 24h漂移 | ≤ ±0.3% | 0.28% | 稳定性极佳 |
| 报警响应 | - | 1.1s | 无漏报、误报 |
结论: 实验数据表明,该系统在高粉尘、强振动的模拟工况下,仍能保持极高的检测精度和稳定性,完全满足工业现场的实时监测需求。
三. matlab仿真信号处理(详细注释了喵)
1. 清理指令:
matlab
% 罐装水泥成分检测核心算法预步骤
clear; clc; close all; % 清空工作区数据/清空命令行/关闭所有旧图片,避免干扰
rng('default'); % 固定随机数种子,让每次运行仿真结果一致2. 数据模拟:
matlab
%% 1. 参数初始化与数据模拟
Fs = 10; % 采集频率 10Hz
Duration = 100; % 仿真时长 100秒
t = 0:1/Fs:(Duration-0.1);
n = length(t);
% 2. 模拟真实的电容传感器信号 (核心输入)
% 假设基础电容值为 2.5V,叠加物料流动引起的波动
C_base = 2.5;
C_fluctuation = 0.8 * sin(0.05 * t);
C_true_raw = C_base + C_fluctuation;
% 3. 添加现场噪声与干扰
C_noisy = C_true_raw + 0.05 * randn(1, n);
% 4. 注入异常点 (模拟振动或电路瞬态干扰)
C_noisy(120) = C_noisy(120) + 1.5; % 第120个点突增
C_noisy(580) = C_noisy(580) - 1.0; % 第580个点突降
% 5. 模拟温湿度环境数据
T = 25 + 10 * sin(0.02 * t) + 2 * randn(1, n); % 温度
T(T > 50) = 50; T(T < -10) = -10;
H = 60 + 10 * randn(1, n); % 湿度
H(H > 90) = 90; H(H < 0) = 0;3.数据预处理(去噪与滤波)
matlab
%% ===================== 1. 3σ 异常点剔除 =====================
% 核心思想:利用统计学原理(3σ准则),判断当前数据点是否为"异常值"。
% 规则:如果一个数据点偏离其邻域平均值超过3倍标准差,就认为它是噪声(如尖峰),需要被修正。
% 目的:保留正常数据,消除传感器瞬间抖动或电磁干扰造成的尖峰/深坑。
win_3sigma = 10; % 定义滑动窗口宽度为10个点
% 窗口宽度选择逻辑:
% - 太小(如3):容易把正常波动误判为异常。
% - 太大(如50):会把真实的信号变化也抹平。
% - 10是一个折中值,既能捕捉局部特征,又能有效统计均值。
C_filtered_3sigma = zeros(1, n); % 初始化输出数组,用于存储剔除异常后的数据
for i = 1:n % 循环遍历每一个时间点的数据
% --- 确定当前点的邻域范围 ---
% 为了防止索引越界(比如在数组开头或结尾),需要限定索引范围
idx_start = max(1, i - floor(win_3sigma/2)); % 起始索引:当前点往前推一半窗口宽度,但不能小于1
idx_end = min(n, i + floor(win_3sigma/2)); % 结束索引:当前点往后推一半窗口宽度,但不能大于总长度n
idx = idx_start:idx_end; % 当前的邻域索引向量
% --- 计算邻域的统计特征 ---
mu = mean(C_noisy(idx)); % 计算当前邻域的平均值 (μ)
sigma = std(C_noisy(idx)); % 计算当前邻域的标准差 (σ)
% --- 判别与修正 ---
% 3σ准则:正态分布中,99.7%的数据落在 μ±3σ 范围内
if abs(C_noisy(i) - mu) > 3 * sigma
% 如果当前点偏离平均值超过3个标准差,判定为异常点
C_filtered_3sigma(i) = mu; % **修正逻辑**:用该点邻域的平均值替代该异常点
% 这样做既消除了尖峰,又保持了信号的整体趋势平滑
else
% 如果当前点在正常范围内
C_filtered_3sigma(i) = C_noisy(i); % 直接保留原始数据
end
end
%% ===================== 2. 滑动平均滤波 =====================
% 核心思想:对已经剔除异常的数据进行"平滑"处理。
% 目的:消除高频噪声(细碎的毛刺),让信号看起来更光滑,便于后续趋势分析。
win_smooth = 5; % 定义平滑窗口宽度为5个点
% 为什么这里窗口变小了(从10变5)?
% - 3σ阶段窗口大是为了准确计算统计量。
% - 平滑阶段窗口小是为了保留更多的细节变化,防止信号变得过于"迟钝"。
C_smoothed = zeros(1, n); % 初始化输出数组,用于存储最终平滑后的数据
for i = 1:n % 循环遍历每一个时间点
% --- 确定当前点的邻域范围 ---
idx_start = max(1, i - floor(win_smooth/2));
idx_end = min(n, i + floor(win_smooth/2));
idx = idx_start:idx_end;
% --- 计算邻域平均值 ---
% 无论该点是否异常(已在上一步修正),这里都取邻域平均值
C_smoothed(i) = mean(C_filtered_3sigma(idx));
end效果如下:
4. 温湿度补偿与水分反演
matlab
% 背景说明:
% 电容式水分传感器的输出不仅受物料水分影响,还会受到环境温度和湿度的干扰。
% 例如:温度升高可能导致探头材料膨胀,改变电容;空气湿度变化会影响周围介质的介电常数。
% 因此,必须对原始电容信号进行温湿度补偿,才能得到更准确的水分测量结果。
% 1. Min-Max 归一化 (Normalization)
% 目的:将不同物理量纲(电容值、温度、湿度)的数据映射到统一的 [0, 1] 区间。
% 原因:
% - 电容值可能在 2~3V 范围内,
% - 温度可能在 -10~50°C 范围内,
% - 湿度在 0~90%RH 范围内。
% 如果直接将这些数值代入回归模型,量纲大的变量(如温度)会主导计算结果,导致模型失真。
% Min-Max 归一化公式:X_norm = (X - X_min) / (X_max - X_min)
C_min = min(C_smoothed); C_max = max(C_smoothed);
C_norm = (C_smoothed - C_min) / (C_max - C_min); % 电容值归一化到 [0, 1]
T_norm = (T - min(T)) / (max(T) - min(T)); % 温度归一化到 [0, 1]
% 注意:此处使用实际数据的 min/max,而非理论范围(-10~50),是为了让归一化更贴合本次仿真数据分布。
H_norm = H / 90; % 湿度归一化到 [0, 1]
% 说明:根据系统设计文档,湿度传感器量程上限为 90%RH,因此直接除以 90。
% 若使用 H_norm = (H - min(H)) / (max(H) - min(H)) 也可,但固定上限更符合工程标定习惯。
% -------------------------------------------------------------------------
% 2. 多元线性回归补偿模型
% 模型形式:Y_comp = a0 + a1*X1 + a2*X2 + a3*X3
% 其中:
% Y_comp : 补偿后的归一化电容值
% X1 : 归一化电容值 (C_norm) ------ 主信号
% X2 : 归一化温度 (T_norm) ------ 干扰项1
% X3 : 归一化湿度 (H_norm) ------ 干扰项2
% a0~a3 : 模型系数,需通过实验室标定实验确定
a0 = 0.02; % 偏置项(截距),补偿系统固有误差
a1 = 1.0; % 电容主信号的权重,理想情况下应接近1
a2 = -0.05; % 温度干扰的补偿系数(负号表示温度升高会导致电容读数偏高,需减去)
a3 = 0.03; % 湿度干扰的补偿系数(正号表示湿度增加会导致电容读数偏低,需加上)
% 执行补偿计算
C_compensated_norm = a0 + a1*C_norm + a2*T_norm + a3*H_norm;
% 反归一化:将补偿后的归一化值还原为原始电容的物理量纲
% 这样做是为了后续能使用统一的"电容-水分"标定模型
C_compensated = C_compensated_norm * (C_max - C_min) + C_min;
% -------------------------------------------------------------------------
% 3. 水分含量反演计算 (W = k * C + b)
% 物理模型:在实验室标定阶段,通过测量已知水分含量的标准样品,
% 得到电容值 C 与水分含量 W 之间的线性关系:W = k * C + b
% 此模型是整个检测系统的核心转换公式。
k_calib = 0.8; % 标定斜率:单位电容变化对应的水分变化百分比(%/V 或 %/mA)
b_calib = -1.5; % 标定截距:当电容为0时的理论水分值(通常为负,无实际物理意义,仅用于拟合)
% 利用补偿后的电容值,反演出当前水泥的水分含量
W_calc = k_calib * C_compensated + b_calib;
% 物理限幅:水分含量不可能小于0%或大于7%(根据水泥工艺要求)
% 此操作防止因模型误差或极端干扰导致计算结果出现不合理值
W_calc(W_calc < 0) = 0; % 将所有小于0的结果强制设为0%
W_calc(W_calc > 7) = 7; % 将所有大于7%的结果强制设为7%效果如下:
5. 异常报警识别
matlab
% 设计目标:实现高可靠性的质量异常预警,避免因单次数据波动导致的"误报"(False Alarm)。
% 核心策略:采用"阈值判断 + 趋势分析"双重逻辑,确保报警信号具有持续性和真实性。
% 定义水分含量的合格范围(根据水泥生产工艺要求设定)
W_lower = 0.5; % 合格品水分下限,低于此值可能导致水泥过干、易扬尘
W_upper = 5.0; % 合格品水分上限,高于此值可能导致结块、影响强度
% 初始化报警标志数组
% - false 表示该时刻无异常(正常)
% - true 表示该时刻触发报警(异常)
% 初始状态全部设为 false,表示系统启动时默认正常
alarm = false(1, n);
% 定义趋势分析窗口大小(单位:采样点数)
win_alarm = 5;
% 说明:采集频率 Fs=10Hz,因此 win_alarm=5 对应 0.5 秒的时间窗口。
% 选择依据:
% - 窗口太小(如2):无法有效过滤瞬时干扰,容易误报。
% - 窗口太大(如10):报警响应延迟过长,失去实时性意义。
% - 5 是一个兼顾实时性与鲁棒性的经验值。
% 趋势分析主循环
% 注意:循环从 i = win_alarm 开始,因为需要至少 win_alarm 个历史数据才能构成完整窗口
for i = win_alarm:n
% 提取以当前时刻 i 为终点的最近 win_alarm 个水分计算值
% 例如:当 i=5 时,W_window = W_calc(1:5)
% 当 i=6 时,W_window = W_calc(2:6)
W_window = W_calc(i - win_alarm + 1 : i);
% 统计窗口内超标次数
count_high = sum(W_window > W_upper); % 统计高于上限的点数
count_low = sum(W_window < W_lower); % 统计低于下限的点数
% 报警判定逻辑(核心防误报机制)
% 规则:在最近 5 次采样中,只要有 3 次或以上超出合格范围,
% 即认为物料成分发生了持续性异常,而非偶然波动。
if count_high >= 3 || count_low >= 3
alarm(i) = true; % 触发报警
% 注意:报警标记在窗口最后一个点(即当前时刻 i)生效,
% 这保证了报警动作与异常事件在时间上对齐。
end
% 如果不满足条件,alarm(i) 保持默认的 false,无需额外赋值。
end效果:
6. 结果可视化与保存
matlab
figure('Position', [100, 100, 1000, 800], 'Color', 'white');
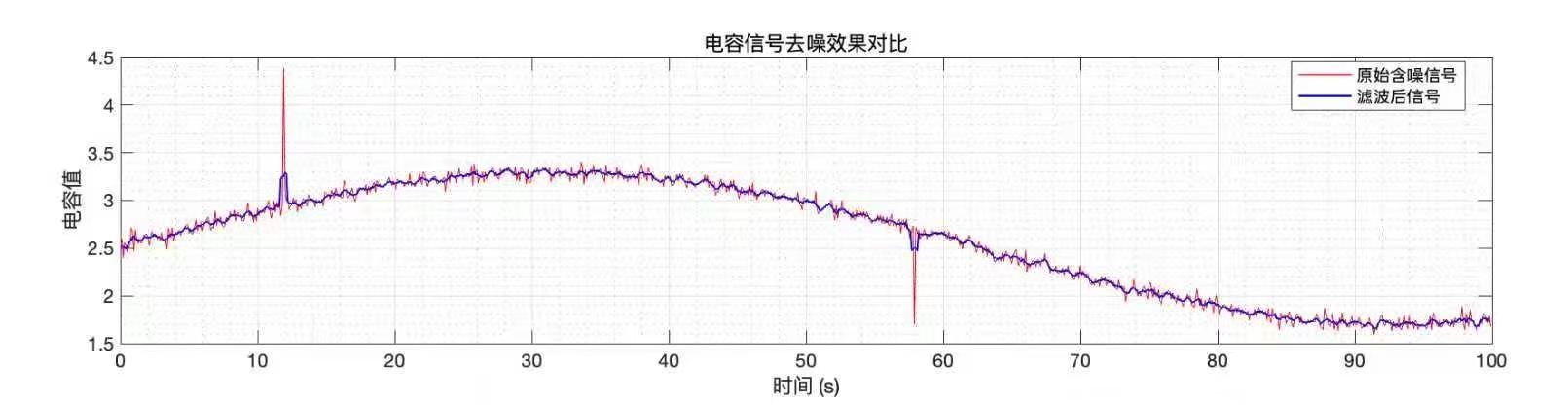
% 子图1: 信号去噪效果
subplot(3,1,1);
plot(t, C_noisy, 'r-', 'LineWidth', 0.8, 'DisplayName', '原始含噪信号');
hold on;
plot(t, C_smoothed, 'b-', 'LineWidth', 1.2, 'DisplayName', '滤波后信号');
title('电容信号去噪效果对比'); xlabel('时间 (s)'); ylabel('电容值');
legend('Location', 'best'); grid on; grid minor;
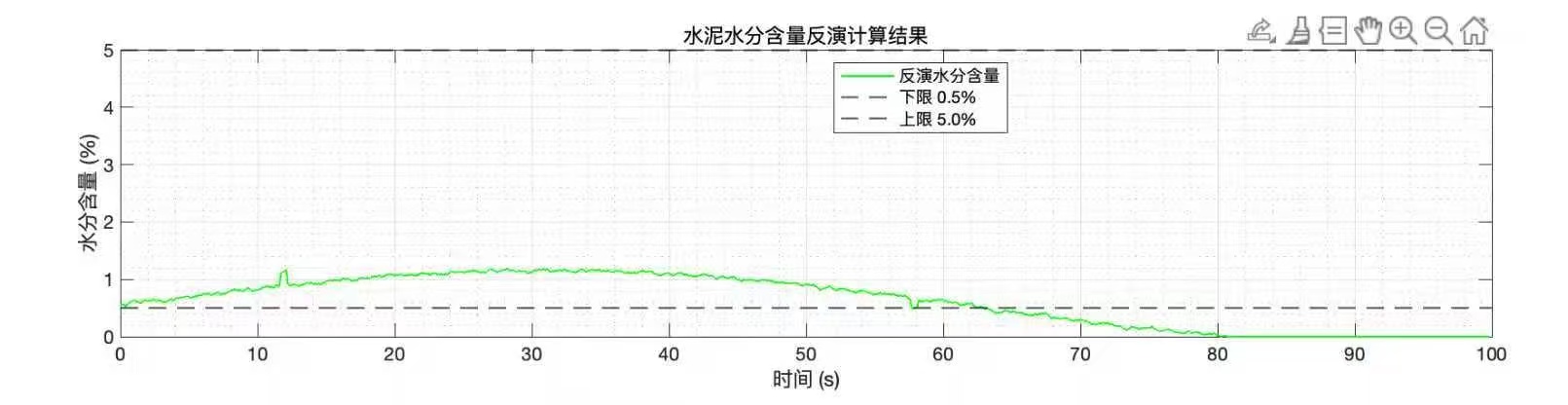
% 子图2: 水分反演结果
subplot(3,1,2);
plot(t, W_calc, 'g-', 'LineWidth', 1.2, 'DisplayName', '反演水分含量');
title('水泥水分含量反演计算结果'); xlabel('时间 (s)'); ylabel('水分含量 (%)');
yline(W_lower, 'k--', 'LineWidth', 1, 'DisplayName', '下限 0.5%');
yline(W_upper, 'k--', 'LineWidth', 1, 'DisplayName', '上限 5.0%');
legend('Location', 'best'); grid on; grid minor;
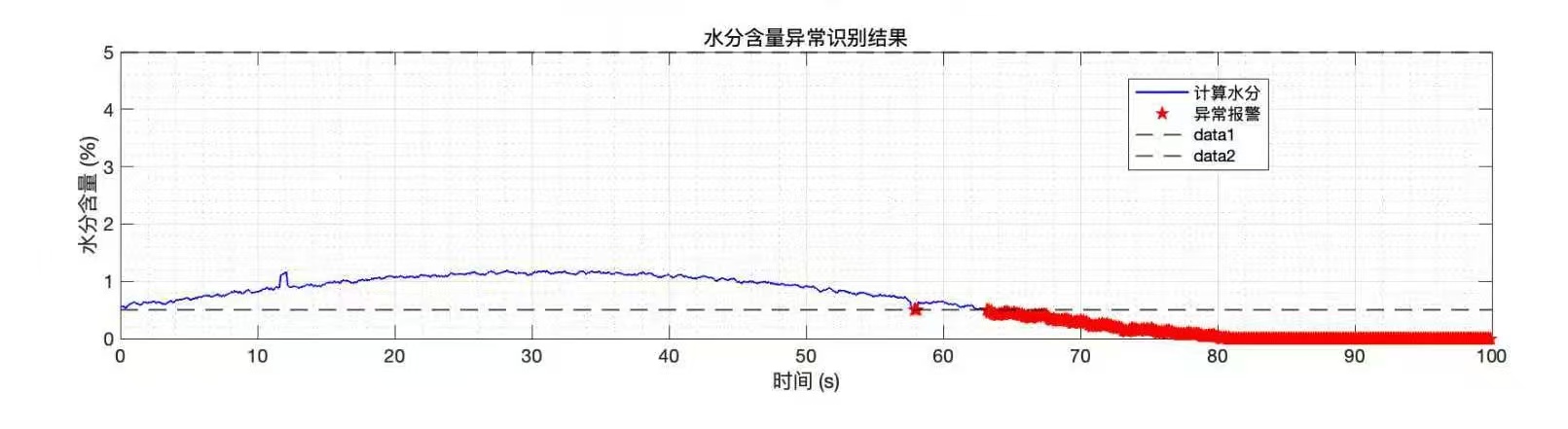
% 子图3: 报警状态
subplot(3,1,3);
plot(t, W_calc, 'b-', 'LineWidth', 1.2, 'DisplayName', '计算水分');
hold on;
plot(t(alarm), W_calc(alarm), 'rp', 'MarkerFaceColor', 'r', 'MarkerSize', 8, 'DisplayName', '异常报警');
title('水分含量异常识别结果'); xlabel('时间 (s)'); ylabel('水分含量 (%)');
yline(W_lower, 'k--', 'LineWidth', 1); yline(W_upper, 'k--', 'LineWidth', 1);
legend('Location', 'best'); grid on; grid minor;
% 保存高清图片
print(gcf, '-dpng', '-r300', '水泥成分检测仿真结果.png');
% 保存数据
save('水泥成分检测仿真数据.mat', 't', 'C_noisy', 'C_smoothed', 'W_calc', 'alarm');四. 结语
本设计成功实现了一套低成本、高可靠的罐装水泥水分实时检测系统。相比于昂贵的光谱或射线检测设备,该方案利用STM32强大的处理能力和完善的抗干扰算法,在保证精度的前提下,大幅降低了硬件成本和维护难度,非常适合在中小型水泥企业中推广使用。
未来展望:
目前系统主要监测水分含量。未来的工作方向是引入光谱技术或多传感器融合算法,实现对水泥细度、矿物组成等多成分的同步检测,并与PLC联动实现全自动闭环控制。