非线性磁链观测器
论文参考:Sensorless Control of Surface-Mount Permanent-Magnet Synchronous Motors Based on a Nonlinear Observer
该观测器可不通过开环强托实现电机全速域运行
一、实现过程推导
表贴式PMSM两相静止坐标系下电压方程:
{ u α = R s i α + L s d i α d t + e α u β = R s i β + L s d i β d t + e β \left\{ \begin{aligned} u_{\alpha} &= R_s i_{\alpha} + L_s \frac{di_{\alpha}}{dt} + e_{\alpha} \\ u_{\beta} &= R_s i_{\beta} + L_s \frac{di_{\beta}}{dt} + e_{\beta} \end{aligned} \right. ⎩ ⎨ ⎧uαuβ=Rsiα+Lsdtdiα+eα=Rsiβ+Lsdtdiβ+eβ
其中,反电动势为:
{ e α = − ω r ψ f sin ( θ r ) e β = ω r ψ f cos ( θ r ) \left\{ \begin{aligned} e_{\alpha} = -\omega_{r} \psi_{f} \sin \left( \theta_{r} \right) \\ e_{\beta} = \omega_{r} \psi_{f} \cos \left( \theta_{r} \right) \end{aligned} \right. {eα=−ωrψfsin(θr)eβ=ωrψfcos(θr)
其中, ω r \ \omega_{r} ωr为电角度、 θ r \ \theta_{r} θr为转子位置、 ψ f \ \psi_{f} ψf为永磁体磁链,将反电势带入得到:
{ u α = R s i α + L s d i α d t − ω r ψ f sin ( θ r ) u β = R s i β + L s d i β d t + ω r ψ f cos ( θ r ) \left\{ \begin{aligned} u_{\alpha} &= R_s i_{\alpha} + L_s \frac{di_{\alpha}}{dt} -\omega_{r} \psi_{f} \sin \left( \theta_{r} \right) \\ u_{\beta} &= R_s i_{\beta} + L_s \frac{di_{\beta}}{dt} + \omega_{r} \psi_{f} \cos \left( \theta_{r} \right) \end{aligned} \right. ⎩ ⎨ ⎧uαuβ=Rsiα+Lsdtdiα−ωrψfsin(θr)=Rsiβ+Lsdtdiβ+ωrψfcos(θr)
更改顺序:
{ u α − R s i α = L s d i α d t − ω r ψ f sin ( θ r ) u β − R s i β = L s d i β d t + ω r ψ f cos ( θ r ) \left\{ \begin{aligned} u_{\alpha} &- R_s i_{\alpha} = L_s \frac{di_{\alpha}}{dt} -\omega_{r} \psi_{f} \sin \left( \theta_{r} \right) \\ u_{\beta} &- R_s i_{\beta} = L_s \frac{di_{\beta}}{dt} + \omega_{r} \psi_{f} \cos \left( \theta_{r} \right) \end{aligned} \right. ⎩ ⎨ ⎧uαuβ−Rsiα=Lsdtdiα−ωrψfsin(θr)−Rsiβ=Lsdtdiβ+ωrψfcos(θr)
令: { y 1 = u α − R s i α y 2 = u β − R s i β (式 1 − 1 ) \left\{ \begin{aligned} y_1= u_{\alpha} &- R_s i_{\alpha}\\ y_2= u_{\beta} &- R_s i_{\beta} \end{aligned} \right.(式1-1) {y1=uαy2=uβ−Rsiα−Rsiβ(式1−1)
则:
{ x 1 ˙ = L s d i α d t − ω r ψ f sin ( θ r ) = y 1 x 2 ˙ = L s d i β d t + ω r ψ f cos ( θ r ) = y 2 (式 1 − 2 ) \left\{ \begin{aligned} \dot{x_1}= L_s \frac{di_{\alpha}}{dt} -\omega_{r} \psi_{f} \sin \left( \theta_{r} \right) =y_1\\ \dot{x_2}= L_s \frac{di_{\beta}}{dt} + \omega_{r} \psi_{f} \cos \left( \theta_{r} \right)=y_2\end{aligned} \right.(式1-2) ⎩ ⎨ ⎧x1˙=Lsdtdiα−ωrψfsin(θr)=y1x2˙=Lsdtdiβ+ωrψfcos(θr)=y2(式1−2)
上式中, x x x为未知的需要观测的变量, y y y为可检测的常量
ω r \ \omega_{r} ωr为电角度、 θ r \ \theta_{r} θr为转子位置,这两个满足 : θ r = ω r t \theta_{r}= \omega_{r}t θr=ωrt,则存在关系: ( sin θ r ) ′ = ( sin w t ) ′ = w cos w t , ( cos θ r ) ′ = ( cos w t ) ′ = − w sin w t (\sin\theta_{r})^{\prime}=(\sin wt)^{\prime}=w\cos wt , (\cos\theta_{r})^{\prime}=(\cos wt)^{\prime}=-w\sin wt (sinθr)′=(sinwt)′=wcoswt,(cosθr)′=(coswt)′=−wsinwt
对 x 1 ˙ \dot{x_1} x1˙和 x 2 ˙ \dot{x_2} x2˙进行积分,则 满足关系:
x 1 x 2 = L i α i β + φ m cos θ sin θ (式 2 ) \left\\begin{array}{l} x1\\\\ x2 \\end{array}\\right=L\left\\begin{array}{l} i_{\\alpha}\\\\ i_{\\beta} \\end{array}\\right+\varphi_{m}\left\\begin{array}{l} \\cos\\theta\\\\ \\sin\\theta \\end{array}\\right(式2) x1x2=Liαiβ+φmcosθsinθ(式2)
上式中, φ m \varphi_m φm为电机永磁体磁链,为固定值,定义
η = η 1 η 2 = φ m cos θ sin θ = x 1 x 2 − L i α i β (式 3 ) \eta=\left\\begin{array}{l} \\eta_1\\\\ \\eta_2 \\end{array}\\right=\varphi_{m}\left\\begin{array}{l} \\cos\\theta\\\\ \\sin\\theta \\end{array}\\right= \left\\begin{array}{l} {x}1\\\\ {x2} \\end{array}\\right-L\left\\begin{array}{l} i_{\\alpha}\\\\ i_{\\beta} \\end{array}\\right(式3) η=η1η2=φmcosθsinθ=x1x2−Liαiβ(式3)
η \eta η满足范数: ∣ ∣ η ∣ ∣ 2 = ∣ φ 1 c o s θ ∣ 2 + ∣ φ 2 s i n θ ∣ 2 = φ m 2 {||\eta||}^2={|\varphi_{1}cos\theta|^2+|\varphi_{2}sin\theta|^2}=\varphi_{m}^2 ∣∣η∣∣2=∣φ1cosθ∣2+∣φ2sinθ∣2=φm2,根据式3定义 η \eta η的观测器:
η ^ = η 1 \^ η 2 \^ = x \^ 1 x 2 \^ − L i α i β (式 4 ) \hat{\eta}=\left\\begin{array}{l} \\hat{\\eta_1}\\\\ \\hat{\\eta_2} \\end{array}\\right= \left\\begin{array}{l} \\hat{x}1\\\\ \\hat{x2} \\end{array}\\right-L\left\\begin{array}{l} i_{\\alpha}\\\\ i_{\\beta} \\end{array}\\right(式4) η^=η1\^η2\^=x\^1x2\^−Liαiβ(式4)
我们需要构建一个对x的观测器观测x的状态,构建观测器如下:
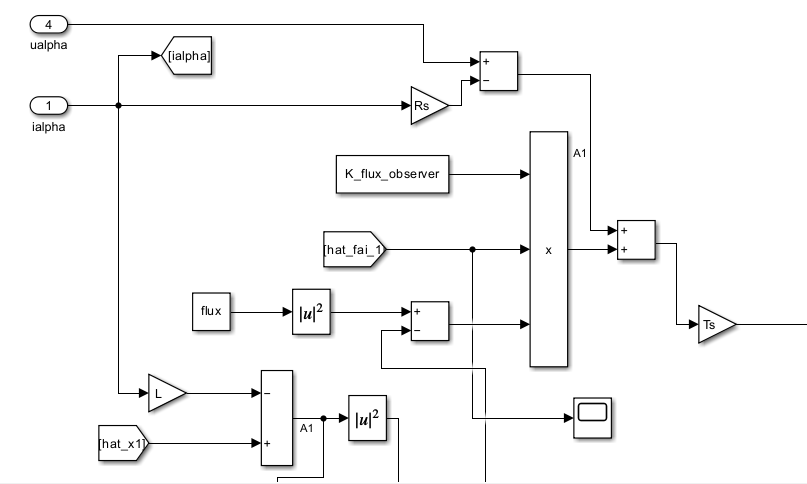
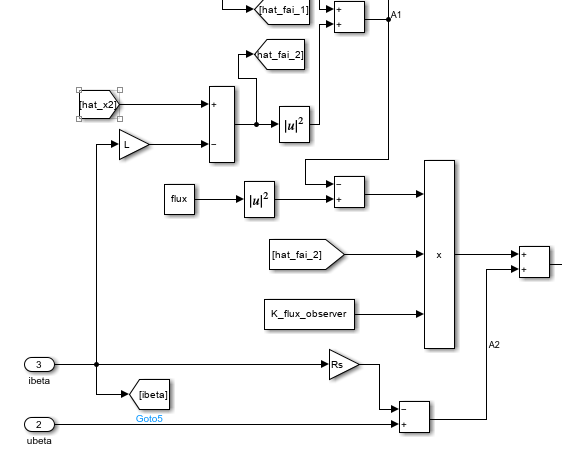
x ^ ˙ = y + K ∗ η ^ ψ m 2 − ∥ η \^ ∥ 2 (式 5 ) \dot{\hat{x}}=y+K*\hat{\eta}\left\\psi_{m}\^{2}-\\\|\\hat{\\eta}\\\|\^{2}\\right(式5) x^˙=y+K∗η^ψm2−∥η\^∥2(式5)
其中, y y y由(式1-1)给出, K K K为观测器增益, [ ψ m 2 − ∥ η ( x ^ ) ∥ 2 [\psi_{m}^{2}-\|\eta(\hat{x})\|^{2} [ψm2−∥η(x^)∥2为观测器驱动项, η ^ \hat{\eta} η^由(式4)给出,当 η ^ \hat{\eta} η^收敛时,满足上面的黄色范数公式,此时 x ^ \hat{x} x^也收敛,满足开始的x的定义(式1-1)
因为此时 η ^ \hat{\eta} η^收敛,即 η ^ = η \hat{\eta}=\eta η^=η,根据(式3)的定义关系,可以得到角度的观测:
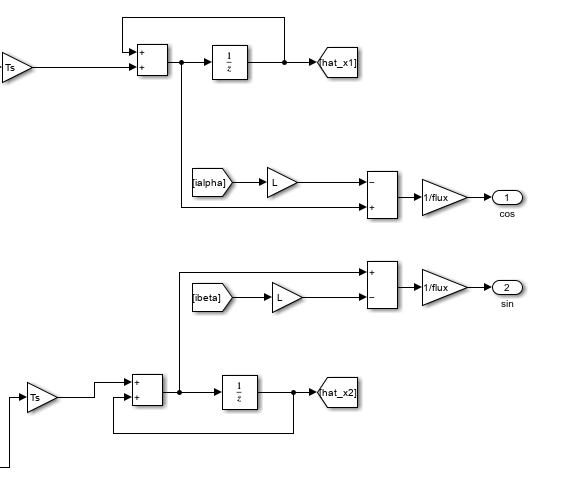
cos θ \^ sin θ \^ = 1 φ m ( x \^ 1 x 2 \^ − L i α i β ) (式 6 ) \left\\begin{array}{l} \\cos\\hat\\theta\\\\ \\sin\\hat\\theta \\end{array}\\right=\frac{1}{\varphi_{m}}({ \left\\begin{array}{l} \\hat{x}1\\\\ \\hat{x2} \\end{array}\\right-L\left\\begin{array}{l} i_{\\alpha}\\\\ i_{\\beta} \\end{array}\\right})(式6) cosθ\^sinθ\^=φm1(x\^1x2\^−Liαiβ)(式6)
总结: 构建观测器 (式4)得到中间变量 η {\eta} η的观测,再通过观测器(式5)实现x的观测,最后通过(式6)计算得到转子角度
二、仿真
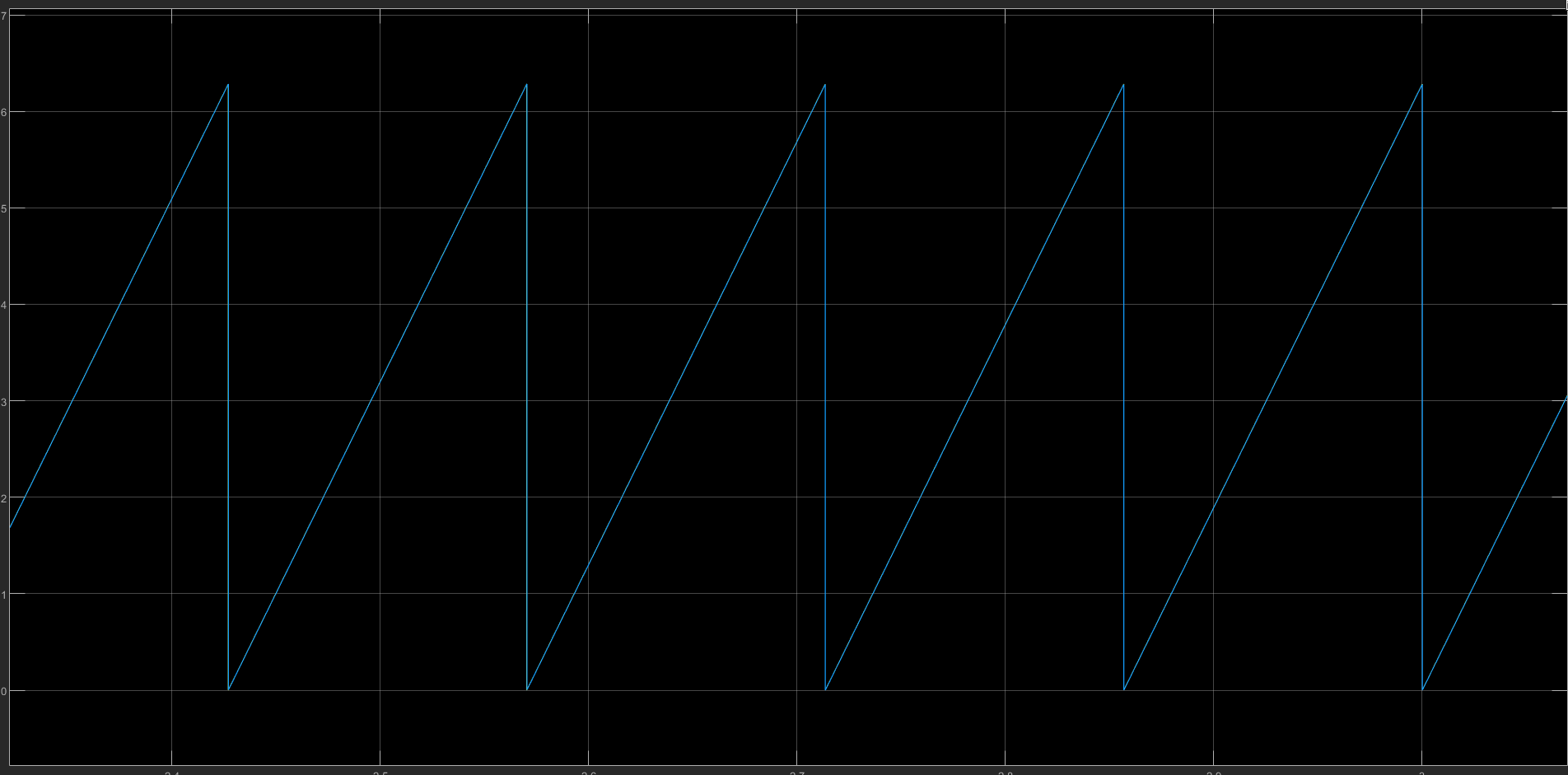
锁相环: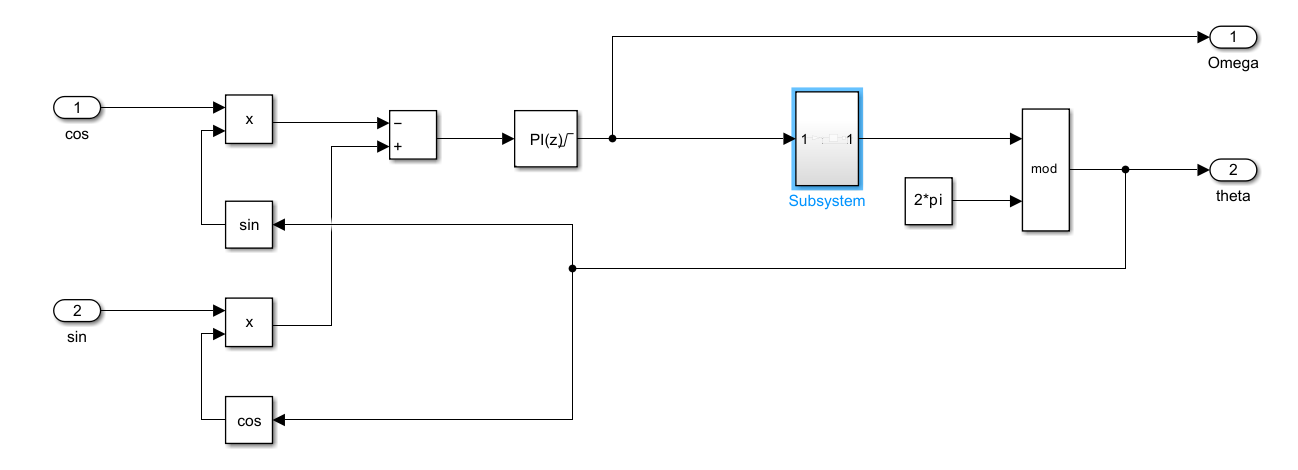
效果:正负200转翻转: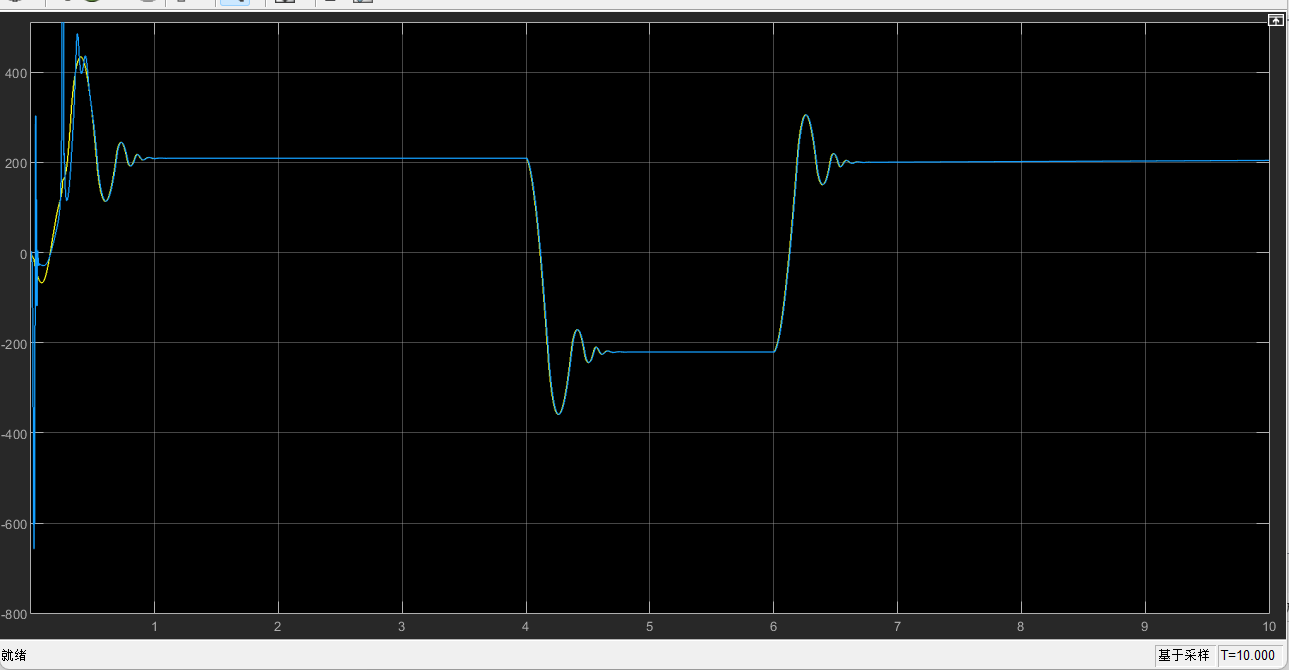
效果很好