本文深入探讨了多智能体强化学习(MARL)的核心概念,详细介绍了环境建模方法,并实现了多种MARL算法。内容涵盖了MARL与单智能体RL的区别、面临的挑战(如环境非平稳性、信用分配问题等),以及不同类型的MARL问题(协作型、竞争型、混合型)。文章还通过实例展示了如何构建多智能体环境,并实现了独立学习和QMIX算法。最后,本文提出了应对MARL挑战的解决方案,并提供了算法选择指南,帮助读者更好地理解和应用MARL技术。
课程目标
- 理解多智能体强化学习的基本概念
- 掌握多智能体环境建模方法
- 实现多智能体强化学习算法
多智能体强化学习概述
与单智能体RL的区别
多智能体强化学习(MARL)相比单智能体强化学习面临以下挑战:
- 环境非平稳性:其他智能体的学习导致环境动态变化
- 信用分配问题:难以确定哪个智能体对团队奖励贡献最大
- 状态空间爆炸:联合状态空间随智能体数量指数增长
- 通信约束:智能体间通信可能受限
MARL问题分类
- 协作型:所有智能体有共同目标
- 竞争型:智能体有冲突目标
- 混合型:包含协作和竞争元素
多智能体环境建模
部分可观测马尔可夫决策过程(POMDP)
code-snippet__js
import numpy as np
import random
import gym
from gym import spaces
from typing import List, Dict, Any, Tuple, Optional
import matplotlib.pyplot as plt
class MultiAgentEnvironment:
"""多智能体环境基类"""
def __init__(self, n_agents: int, state_dim: int, action_dim: int,
observation_dim: int, max_steps: int = 100):
self.n_agents = n_agents
self.state_dim = state_dim
self.action_dim = action_dim
self.observation_dim = observation_dim
self.max_steps = max_steps
self.step_count = 0
# 状态和观测空间
self.state_space = spaces.Box(low=-np.inf, high=np.inf, shape=(state_dim,))
self.observation_spaces = [spaces.Box(low=-np.inf, high=np.inf, shape=(observation_dim,))
for _ in range(n_agents)]
self.action_spaces = [spaces.Discrete(action_dim) for _ in range(n_agents)]
# 当前状态
self.state = None
self.observations = [None] * n_agents
self.rewards = [0.0] * n_agents
self.dones = [False] * n_agents
def reset(self) -> List[np.ndarray]:
"""重置环境"""
self.state = self.sample_initial_state()
self.observations = [self.get_observation(agent_id) for agent_id in range(self.n_agents)]
self.rewards = [0.0] * self.n_agents
self.dones = [False] * self.n_agents
self.step_count = 0
return self.observations
def step(self, actions: List[int]) -> Tuple[List[np.ndarray], List[float], List[bool], Dict]:
"""执行一步"""
if len(actions) != self.n_agents:
raise ValueError(f"需要 {self.n_agents} 个动作,但只提供了 {len(actions)} 个")
# 更新状态
next_state = self.transition(self.state, actions)
# 计算奖励
rewards = self.compute_rewards(next_state, actions)
# 检查终止条件
dones = [self.is_done() for _ in range(self.n_agents)]
# 更新观测
observations = [self.get_observation(agent_id) for agent_id in range(self.n_agents)]
self.state = next_state
self.observations = observations
self.rewards = rewards
self.dones = dones
self.step_count += 1
info = {'step': self.step_count}
return observations, rewards, dones, info
def sample_initial_state(self) -> np.ndarray:
"""采样初始状态"""
return np.random.rand(self.state_dim)
def transition(self, state: np.ndarray, actions: List[int]) -> np.ndarray:
"""状态转移函数"""
# 子类需要实现
raise NotImplementedError
def compute_rewards(self, state: np.ndarray, actions: List[int]) -> List[float]:
"""计算奖励"""
# 子类需要实现
raise NotImplementedError
def get_observation(self, agent_id: int) -> np.ndarray:
"""获取智能体观测"""
# 子类需要实现
raise NotImplementedError
def is_done(self) -> bool:
"""检查是否终止"""
return self.step_count >= self.max_steps
class SimpleCooperativeEnv(MultiAgentEnvironment):
"""简单协作环境:智能体需要协作到达目标"""
def __init__(self, n_agents: int = 2, grid_size: int = 5):
self.grid_size = grid_size
self.n_agents = n_agents
self.action_dim = 5 # 0:不动, 1:上, 2:下, 3:左, 4:右
# 状态:[agent1_x, agent1_y, agent2_x, agent2_y, target_x, target_y]
state_dim = 2 * n_agents + 2
observation_dim = 2 * n_agents + 2 # 每个智能体观测所有位置
super().__init__(n_agents, state_dim, self.action_dim, observation_dim)
# 目标位置
self.target_pos = np.array([grid_size - 1, grid_size - 1])
def sample_initial_state(self) -> np.ndarray:
"""采样初始状态:智能体随机位置,目标固定"""
state = np.zeros(self.state_dim)
# 智能体位置
for i in range(self.n_agents):
agent_x = random.randint(0, self.grid_size - 2) # 避免直接在目标位置
agent_y = random.randint(0, self.grid_size - 2)
state[2*i] = agent_x
state[2*i + 1] = agent_y
# 目标位置
state[-2] = self.target_pos[0]
state[-1] = self.target_pos[1]
return state
def transition(self, state: np.ndarray, actions: List[int]) -> np.ndarray:
"""状态转移:根据动作移动智能体"""
new_state = state.copy()
for i, action in enumerate(actions):
agent_x_idx = 2 * i
agent_y_idx = 2 * i + 1
agent_x = int(new_state[agent_x_idx])
agent_y = int(new_state[agent_y_idx])
# 执行动作
if action == 1: # 上
agent_y = max(0, agent_y - 1)
elif action == 2: # 下
agent_y = min(self.grid_size - 1, agent_y + 1)
elif action == 3: # 左
agent_x = max(0, agent_x - 1)
elif action == 4: # 右
agent_x = min(self.grid_size - 1, agent_x + 1)
# action == 0 时不动
new_state[agent_x_idx] = agent_x
new_state[agent_y_idx] = agent_y
return new_state
def compute_rewards(self, state: np.ndarray, actions: List[int]) -> List[float]:
"""计算奖励:协作到达目标"""
rewards = []
# 计算每个智能体到目标的距离
agent_positions = []
for i in range(self.n_agents):
x = state[2 * i]
y = state[2 * i + 1]
agent_positions.append(np.array([x, y]))
target_pos = np.array([state[-2], state[-1]])
# 奖励基于所有智能体到目标的平均距离的倒数
distances = [np.linalg.norm(pos - target_pos) for pos in agent_positions]
avg_distance = np.mean(distances)
# 如果有智能体到达目标,给予团队奖励
team_reward = 0
for pos in agent_positions:
if np.array_equal(pos, target_pos):
team_reward += 1.0 # 到达目标的智能体
# 个人奖励:靠近目标
individual_rewards = [max(0, 1 - dist/self.grid_size) for dist in distances]
# 组合奖励
for i in range(self.n_agents):
rewards.append(individual_rewards[i] + team_reward * 0.5)
return rewards
def get_observation(self, agent_id: int) -> np.ndarray:
"""获取智能体观测:可以看到所有智能体和目标的位置"""
obs = np.zeros(self.observation_dim)
# 每个智能体的位置
for i in range(self.n_agents):
obs[2 * i] = self.state[2 * i] / self.grid_size # 归一化
obs[2 * i + 1] = self.state[2 * i + 1] / self.grid_size
# 目标位置
obs[-2] = self.state[-2] / self.grid_size
obs[-1] = self.state[-1] / self.grid_size
return obs
def render(self):
"""渲染环境状态"""
grid = np.zeros((self.grid_size, self.grid_size))
# 标记目标位置
target_x, target_y = int(self.state[-2]), int(self.state[-1])
grid[target_x, target_y] = 2 # 目标用2表示
# 标记智能体位置
for i in range(self.n_agents):
agent_x, agent_y = int(self.state[2 * i]), int(self.state[2 * i + 1])
if grid[agent_x, agent_y] == 0: # 如果当前位置没有其他标记
grid[agent_x, agent_y] = 1 # 智能体用1表示
else:
grid[agent_x, agent_y] = 3 # 重叠位置用3表示
print("环境状态 (0=空, 1=智能体, 2=目标, 3=重叠):")
print(grid)
# 测试简单协作环境
def test_simple_cooperative_env():
print("=== 测试简单协作环境 ===")
env = SimpleCooperativeEnv(n_agents=2, grid_size=5)
obs = env.reset()
print(f"初始观测: {obs}")
env.render()
# 执行几个随机步骤
for step in range(5):
actions = [random.randint(0, 4) for _ in range(env.n_agents)]
next_obs, rewards, dones, info = env.step(actions)
print(f"步骤 {step + 1}: 动作={actions}, 奖励={rewards}")
env.render()
if any(dones):
print("环境终止")
break多智能体强化学习算法
独立学习(Independent Learning)
code-snippet__js
class QTableAgent:
"""Q表智能体(用于独立学习)"""
def __init__(self, agent_id: int, action_space: int, observation_dim: int,
learning_rate: float = 0.1, discount_factor: float = 0.9,
epsilon: float = 0.1):
self.agent_id = agent_id
self.action_space = action_space
self.observation_dim = observation_dim
self.learning_rate = learning_rate
self.discount_factor = discount_factor
self.epsilon = epsilon
# Q表:使用观测的离散化作为键
self.q_table = {}
def discretize_observation(self, obs: np.ndarray) -> str:
"""将连续观测离散化"""
# 简单的离散化:将每个维度分成10个区间
discrete_values = []
for val in obs:
discrete_val = int(val * 10) # 假设观测值在[0,1]区间
discrete_values.append(discrete_val)
return str(discrete_values)
def get_action(self, obs: np.ndarray, training: bool = True) -> int:
"""根据观测选择动作"""
obs_key = self.discretize_observation(obs)
# 初始化Q值
if obs_key not in self.q_table:
self.q_table[obs_key] = [0.0] * self.action_space
# ε-贪婪策略
if training and random.random() < self.epsilon:
return random.randint(0, self.action_space - 1)
else:
return np.argmax(self.q_table[obs_key])
def update(self, obs: np.ndarray, action: int, reward: float,
next_obs: np.ndarray, done: bool):
"""更新Q表"""
obs_key = self.discretize_observation(obs)
next_obs_key = self.discretize_observation(next_obs)
# 初始化
if obs_key not in self.q_table:
self.q_table[obs_key] = [0.0] * self.action_space
if next_obs_key not in self.q_table:
self.q_table[next_obs_key] = [0.0] * self.action_space
# Q学习更新
current_q = self.q_table[obs_key][action]
if done:
target_q = reward
else:
target_q = reward + self.discount_factor * max(self.q_table[next_obs_key])
new_q = current_q + self.learning_rate * (target_q - current_q)
self.q_table[obs_key][action] = new_q
class IndependentLearningTrainer:
"""独立学习训练器"""
def __init__(self, env: MultiAgentEnvironment):
self.env = env
self.agents = []
# 为每个智能体创建Q表智能体
for i in range(env.n_agents):
agent = QTableAgent(
agent_id=i,
action_space=env.action_spaces[i].n,
observation_dim=env.observation_dim,
learning_rate=0.1,
discount_factor=0.9,
epsilon=0.1
)
self.agents.append(agent)
def train_episode(self) -> List[float]:
"""训练一个episode"""
obs_list = self.env.reset()
total_rewards = [0.0] * self.env.n_agents
step_count = 0
while step_count < self.env.max_steps:
# 每个智能体独立选择动作
actions = []
for i, agent in enumerate(self.agents):
action = agent.get_action(obs_list[i], training=True)
actions.append(action)
# 执行动作
next_obs_list, rewards, dones, info = self.env.step(actions)
# 每个智能体独立更新Q表
for i, agent in enumerate(self.agents):
agent.update(
obs_list[i],
actions[i],
rewards[i],
next_obs_list[i],
dones[i]
)
# 累积奖励
for i in range(self.env.n_agents):
total_rewards[i] += rewards[i]
obs_list = next_obs_list
step_count += 1
if any(dones):
break
return total_rewards
def test_independent_learning():
print("\n=== 独立学习测试 ===")
env = SimpleCooperativeEnv(n_agents=2, grid_size=5)
trainer = IndependentLearningTrainer(env)
# 训练几个episode
for episode in range(10):
rewards = trainer.train_episode()
print(f"Episode {episode + 1}, Rewards: {rewards}")价值分解方法(QMIX)
code-snippet__js
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
class IndividualRNN(nn.Module):
"""单智能体RNN网络"""
def __init__(self, obs_dim: int, action_dim: int, rnn_hidden_dim: int = 64):
super(IndividualRNN, self).__init__()
self.fc1 = nn.Linear(obs_dim, rnn_hidden_dim)
self.rnn = nn.GRUCell(rnn_hidden_dim, rnn_hidden_dim)
self.fc2 = nn.Linear(rnn_hidden_dim, action_dim)
def forward(self, obs, hidden_state):
x = F.relu(self.fc1(obs))
h = self.rnn(x, hidden_state)
q = self.fc2(h)
return q, h
class MixingNetwork(nn.Module):
"""混合网络(QMIX的核心)"""
def __init__(self, n_agents: int, state_dim: int, embed_dim: int = 32):
super(MixingNetwork, self).__init__()
self.n_agents = n_agents
self.embed_dim = embed_dim
# 状态编码器
self.state_encoder = nn.Sequential(
nn.Linear(state_dim, embed_dim),
nn.ReLU(),
nn.Linear(embed_dim, embed_dim),
nn.ReLU()
)
# 第一层:agent_i -> hypernet_w1_i, hypernet_b1_i
self.hyper_w1 = nn.Sequential(
nn.Linear(embed_dim, embed_dim),
nn.ReLU(),
nn.Linear(embed_dim, self.n_agents * embed_dim)
)
self.hyper_b1 = nn.Sequential(
nn.Linear(embed_dim, embed_dim),
nn.ReLU(),
nn.Linear(embed_dim, embed_dim)
)
# 第二层:hypernet_w2, hypernet_b2
self.hyper_w2 = nn.Sequential(
nn.Linear(embed_dim, embed_dim),
nn.ReLU(),
nn.Linear(embed_dim, embed_dim)
)
self.hyper_b2 = nn.Sequential(
nn.Linear(embed_dim, embed_dim),
nn.ReLU(),
nn.Linear(embed_dim, 1)
)
def forward(self, agent_qs, states):
"""
Args:
agent_qs: (batch_size, n_agents) - 每个智能体的Q值
states: (batch_size, state_dim) - 全局状态
"""
bs = agent_qs.size(0)
# 编码全局状态
state_encoded = self.state_encoder(states) # (batch_size, embed_dim)
# 计算第一层权重和偏置
w1 = self.hyper_w1(state_encoded) # (batch_size, n_agents * embed_dim)
w1 = w1.view(-1, self.n_agents, self.embed_dim) # (batch_size, n_agents, embed_dim)
b1 = self.hyper_b1(state_encoded) # (batch_size, embed_dim)
b1 = b1.view(-1, 1, self.embed_dim) # (batch_size, 1, embed_dim)
# 应用第一层混合
# agent_qs.unsqueeze(-1): (batch_size, n_agents, 1)
# w1: (batch_size, n_agents, embed_dim)
# y1: (batch_size, n_agents, embed_dim)
y1 = torch.bmm(agent_qs.unsqueeze(-1).expand(-1, -1, self.embed_dim), w1) + b1
# 激活函数
y1 = F.elu(y1) # (batch_size, n_agents, embed_dim)
# 第二层权重和偏置
w2 = self.hyper_w2(state_encoded) # (batch_size, embed_dim)
w2 = w2.view(-1, self.embed_dim, 1) # (batch_size, embed_dim, 1)
b2 = self.hyper_b2(state_encoded) # (batch_size, 1)
b2 = b2.view(-1, 1, 1) # (batch_size, 1, 1)
# 应用第二层混合
# y1: (batch_size, n_agents, embed_dim)
# w2: (batch_size, embed_dim, 1)
# q_tot: (batch_size, n_agents, 1) -> (batch_size, n_agents)
y2 = torch.bmm(y1, w2) + b2
q_tot = y2.squeeze(-1).sum(dim=1, keepdim=True).squeeze(-1) # (batch_size,)
return q_tot
class QMixAgent:
"""QMIX智能体"""
def __init__(self, n_agents: int, obs_dim: int, action_dim: int, state_dim: int):
self.n_agents = n_agents
self.obs_dim = obs_dim
self.action_dim = action_dim
self.state_dim = state_dim
# 为每个智能体创建RNN网络
self.individual_rnns = [IndividualRNN(obs_dim, action_dim) for _ in range(n_agents)]
# 混合网络
self.mixer = MixingNetwork(n_agents, state_dim)
# 目标网络
self.target_individual_rnns = [IndividualRNN(obs_dim, action_dim) for _ in range(n_agents)]
self.target_mixer = MixingNetwork(n_agents, state_dim)
# 优化器
self.params = []
for rnn in self.individual_rnns:
self.params.extend(rnn.parameters())
self.params.extend(self.mixer.parameters())
self.optimizer = optim.Adam(self.params, lr=0.001)
# 更新目标网络
self.update_target_networks()
def update_target_networks(self):
"""更新目标网络"""
for i in range(self.n_agents):
self.target_individual_rnns[i].load_state_dict(
self.individual_rnns[i].state_dict()
)
self.target_mixer.load_state_dict(self.mixer.state_dict())
def get_actions(self, obs_list: List[np.ndarray], hidden_states: List[torch.Tensor],
training: bool = True, epsilon: float = 0.1) -> Tuple[List[int], List[torch.Tensor]]:
"""获取动作"""
actions = []
new_hidden_states = []
with torch.no_grad():
for i in range(self.n_agents):
obs_tensor = torch.FloatTensor(obs_list[i]).unsqueeze(0) # (1, obs_dim)
hidden_tensor = hidden_states[i] # (1, rnn_hidden_dim)
q_values, new_hidden = self.individual_rnns[i](obs_tensor, hidden_tensor)
if training and random.random() < epsilon:
action = random.randint(0, self.action_dim - 1)
else:
action = q_values.argmax().item()
actions.append(action)
new_hidden_states.append(new_hidden)
return actions, new_hidden_states
def train(self, batch_data: Dict[str, torch.Tensor]):
"""训练"""
# 提取批次数据
obs_batch = batch_data['obs'] # (batch_size, max_episode_len, n_agents, obs_dim)
actions_batch = batch_data['actions'] # (batch_size, max_episode_len, n_agents)
rewards_batch = batch_data['rewards'] # (batch_size, max_episode_len, 1)
states_batch = batch_data['states'] # (batch_size, max_episode_len, state_dim)
dones_batch = batch_data['dones'] # (batch_size, max_episode_len, 1)
batch_size, max_len = obs_batch.shape[0], obs_batch.shape[1]
# 初始化隐藏状态
hidden_states = [torch.zeros(batch_size, 64) for _ in range(self.n_agents)]
target_hidden_states = [torch.zeros(batch_size, 64) for _ in range(self.n_agents)]
loss = 0
for t in range(max_len - 1):
# 计算当前时间步的Q值
agent_qs = []
for i in range(self.n_agents):
obs_t = obs_batch[:, t, i, :] # (batch_size, obs_dim)
h_t = hidden_states[i] # (batch_size, rnn_hidden_dim)
q_t, h_next = self.individual_rnns[i](obs_t, h_t)
agent_qs.append(q_t.gather(1, actions_batch[:, t, i].unsqueeze(1)).squeeze(1)) # (batch_size,)
hidden_states[i] = h_next
agent_qs = torch.stack(agent_qs, dim=1) # (batch_size, n_agents)
state_t = states_batch[:, t, :] # (batch_size, state_dim)
# 混合Q值
q_tot = self.mixer(agent_qs, state_t) # (batch_size,)
# 计算目标Q值
with torch.no_grad():
next_agent_qs = []
for i in range(self.n_agents):
obs_next = obs_batch[:, t + 1, i, :]
h_next = target_hidden_states[i]
q_next, h_next2 = self.target_individual_rnns[i](obs_next, h_next)
next_agent_qs.append(q_next.max(1)[0]) # 取最大Q值
target_hidden_states[i] = h_next2
next_agent_qs = torch.stack(next_agent_qs, dim=1) # (batch_size, n_agents)
next_state = states_batch[:, t + 1, :]
next_q_tot = self.target_mixer(next_agent_qs, next_state) # (batch_size,)
target_q = rewards_batch[:, t, 0] + \
(1 - dones_batch[:, t, 0]) * 0.9 * next_q_tot # (batch_size,)
# 计算损失
td_error = (q_tot - target_q.detach()) ** 2
loss += td_error.mean()
# 反向传播
self.optimizer.zero_grad()
loss.backward()
self.optimizer.step()
return loss.item()
class QMixTrainer:
"""QMIX训练器"""
def __init__(self, env: MultiAgentEnvironment, max_episodes: int = 1000):
self.env = env
self.max_episodes = max_episodes
self.agent = QMixAgent(
n_agents=env.n_agents,
obs_dim=env.observation_dim,
action_dim=env.action_spaces[0].n,
state_dim=env.state_dim
)
def train(self):
"""训练"""
episode_rewards = []
for episode in range(self.max_episodes):
obs_list = self.env.reset()
total_reward = 0
step_count = 0
# 存储轨迹
trajectory = {
'obs': [],
'actions': [],
'rewards': [],
'states': [],
'dones': []
}
hidden_states = [torch.zeros(1, 64) for _ in range(self.env.n_agents)]
while step_count < self.env.max_steps:
# 获取动作
actions, hidden_states = self.agent.get_actions(
obs_list, hidden_states,
training=True, epsilon=max(0.05, 1.0 - episode / 200)
)
# 执行动作
next_obs_list, rewards, dones, info = self.env.step(actions)
# 存储经验
trajectory['obs'].append([obs.copy() for obs in obs_list])
trajectory['actions'].append(actions.copy())
trajectory['rewards'].append([sum(rewards)]) # 团队奖励
trajectory['states'].append(self.env.state.copy())
trajectory['dones'].append([any(dones)])
obs_list = next_obs_list
total_reward += sum(rewards)
step_count += 1
if any(dones):
break
episode_rewards.append(total_reward)
# 训练(这里简化,实际应该存储更多经验再训练)
if len(trajectory['obs']) > 1:
# 将轨迹转换为张量并训练
obs_tensor = torch.FloatTensor(np.array(trajectory['obs']))
actions_tensor = torch.LongTensor(np.array(trajectory['actions']))
rewards_tensor = torch.FloatTensor(np.array(trajectory['rewards'])).unsqueeze(-1)
states_tensor = torch.FloatTensor(np.array(trajectory['states']))
dones_tensor = torch.FloatTensor(np.array(trajectory['dones'])).unsqueeze(-1)
batch_data = {
'obs': obs_tensor,
'actions': actions_tensor,
'rewards': rewards_tensor,
'states': states_tensor,
'dones': dones_tensor
}
loss = self.agent.train(batch_data)
# 定期更新目标网络
if episode % 100 == 0:
self.agent.update_target_networks()
if episode % 100 == 0:
avg_reward = np.mean(episode_rewards[-100:]) if len(episode_rewards) >= 100 else np.mean(episode_rewards)
print(f"Episode {episode}, Avg Reward: {avg_reward:.2f}")
def test_qmix():
print("\n=== QMIX测试(简化版)===")
# 由于QMIX实现复杂,这里展示概念
print("QMIX概念说明:")
print("- 使用独立的RNN为每个智能体计算Q值")
print("- 使用单调混合网络将个体Q值合并为全局Q值")
print("- 通过反向单调性保证训练稳定性")
print("- 适用于协作型多智能体任务")协作与竞争场景
竞争环境:捕食者-猎物
code-snippet__js
class PredatorPreyEnv(MultiAgentEnvironment):
"""捕食者-猎物环境"""
def __init__(self, n_predators: int = 2, n_prey: int = 1, grid_size: int = 10):
self.n_predators = n_predators
self.n_prey = n_prey
self.n_agents = n_predators + n_prey
self.grid_size = grid_size
self.action_dim = 5 # 不动、上下左右
# 状态:所有智能体的位置 [pred1_x, pred1_y, ..., prey1_x, prey1_y]
state_dim = 2 * self.n_agents
observation_dim = 2 * self.n_agents # 每个智能体看到所有位置
super().__init__(self.n_agents, state_dim, self.action_dim, observation_dim)
# 捕获半径
self.capture_radius = 1.0
def sample_initial_state(self) -> np.ndarray:
"""采样初始状态"""
state = np.zeros(self.state_dim)
# 随机放置捕食者
for i in range(self.n_predators):
state[2 * i] = random.randint(0, self.grid_size - 1)
state[2 * i + 1] = random.randint(0, self.grid_size - 1)
# 随机放置猎物(远离捕食者)
for i in range(self.n_prey):
prey_idx = self.n_predators + i
while True:
x = random.randint(0, self.grid_size - 1)
y = random.randint(0, self.grid_size - 1)
# 检查是否远离所有捕食者
min_dist = float('inf')
for j in range(self.n_predators):
dist = np.sqrt((x - state[2*j])**2 + (y - state[2*j + 1])**2)
min_dist = min(min_dist, dist)
if min_dist > 3: # 确保猎物开始时远离捕食者
state[2 * prey_idx] = x
state[2 * prey_idx + 1] = y
break
return state
def transition(self, state: np.ndarray, actions: List[int]) -> np.ndarray:
"""状态转移"""
new_state = state.copy()
for i, action in enumerate(actions):
x_idx = 2 * i
y_idx = 2 * i + 1
x = int(new_state[x_idx])
y = int(new_state[y_idx])
# 执行动作
if action == 1: # 上
y = max(0, y - 1)
elif action == 2: # 下
y = min(self.grid_size - 1, y + 1)
elif action == 3: # 左
x = max(0, x - 1)
elif action == 4: # 右
x = min(self.grid_size - 1, x + 1)
new_state[x_idx] = x
new_state[y_idx] = y
return new_state
def compute_rewards(self, state: np.ndarray, actions: List[int]) -> List[float]:
"""计算奖励"""
rewards = [0.0] * self.n_agents
# 捕食者奖励
prey_positions = []
for i in range(self.n_prey):
prey_idx = self.n_predators + i
prey_positions.append(np.array([state[2 * prey_idx], state[2 * prey_idx + 1]]))
predator_positions = []
for i in range(self.n_predators):
predator_positions.append(np.array([state[2 * i], state[2 * i + 1]]))
# 检查捕获
captured = [False] * self.n_prey
for prey_idx, prey_pos in enumerate(prey_positions):
for pred_pos in predator_positions:
dist = np.linalg.norm(pred_pos - prey_pos)
if dist <= self.capture_radius:
captured[prey_idx] = True
break
# 分配奖励
for prey_idx in range(self.n_prey):
if captured[prey_idx]:
# 猎物被捕捉:捕食者获得正奖励,猎物获得负奖励
prey_abs_idx = self.n_predators + prey_idx
rewards[prey_abs_idx] = -10.0 # 猎物惩罚
# 所有捕食者共享奖励
shared_reward = 5.0
for pred_idx in range(self.n_predators):
rewards[pred_idx] += shared_reward / self.n_predators
# 捕食者额外奖励:接近猎物
for pred_idx in range(self.n_predators):
pred_pos = predator_positions[pred_idx]
min_dist_to_prey = min([np.linalg.norm(pred_pos - prey_pos)
for prey_pos in prey_positions])
# 距离越近奖励越高
rewards[pred_idx] += max(0, (10 - min_dist_to_prey) / 10)
# 猎物奖励:远离捕食者
for prey_idx in range(self.n_prey):
if not captured[prey_idx]:
prey_abs_idx = self.n_predators + prey_idx
prey_pos = prey_positions[prey_idx]
# 计算到最近捕食者的距离
min_dist_to_pred = min([np.linalg.norm(prey_pos - pred_pos)
for pred_pos in predator_positions])
rewards[prey_abs_idx] += min_dist_to_pred / 10
return rewards
def get_observation(self, agent_id: int) -> np.ndarray:
"""获取观测"""
obs = np.zeros(self.observation_dim)
# 所有智能体的位置(归一化)
for i in range(self.n_agents):
obs[2 * i] = self.state[2 * i] / self.grid_size
obs[2 * i + 1] = self.state[2 * i + 1] / self.grid_size
return obs
def render(self):
"""渲染"""
grid = np.zeros((self.grid_size, self.grid_size))
# 标记猎物位置(用2)
for i in range(self.n_prey):
idx = self.n_predators + i
x, y = int(self.state[2 * idx]), int(self.state[2 * idx + 1])
grid[x, y] = 2
# 标记捕食者位置(用1)
for i in range(self.n_predators):
x, y = int(self.state[2 * i]), int(self.state[2 * i + 1])
if grid[x, y] == 0:
grid[x, y] = 1
else:
grid[x, y] = 3 # 重叠
print("捕食者-猎物环境 (1=捕食者, 2=猎物, 3=重叠):")
print(grid)
def test_predator_prey():
print("\n=== 捕食者-猎物环境测试 ===")
env = PredatorPreyEnv(n_predators=2, n_prey=1, grid_size=8)
obs = env.reset()
print(f"初始观测形状: {[o.shape for o in obs]}")
env.render()
# 执行几个随机步骤
for step in range(3):
actions = [random.randint(0, 4) for _ in range(env.n_agents)]
next_obs, rewards, dones, info = env.step(actions)
print(f"步骤 {step + 1}: 动作={actions}, 奖励={rewards}")
env.render()
if any(dones):
print("环境终止")
break多智能体学习的挑战与解决方案
信用分配问题
code-snippet__js
class CreditAssignmentModule:
"""信用分配模块"""
def __init__(self, n_agents: int):
self.n_agents = n_agents
self.contribution_history = {} # 记录各智能体的贡献
def compute_contributions(self, joint_action: List[int],
joint_observation: List[np.ndarray],
team_reward: float,
individual_rewards: List[float]) -> List[float]:
"""计算每个智能体的贡献"""
contributions = []
# 方法1: 基于动作差异的贡献计算
for i in range(self.n_agents):
# 计算如果没有智能体i的动作,团队表现会如何
hypothetical_team_reward = self.estimate_hypothetical_reward(joint_action, i)
# 智能体i的贡献 = 实际奖励 - 假设奖励
contribution = team_reward - hypothetical_team_reward
contributions.append(contribution)
# 方法2: 基于观测影响的贡献计算
# 这里可以实现更复杂的贡献计算方法
return contributions
def estimate_hypothetical_reward(self, joint_action: List[int], agent_idx: int) -> float:
"""估计缺少某个智能体时的奖励"""
# 简化:随机替换该智能体的动作
hypothetical_actions = joint_action.copy()
hypothetical_actions[agent_idx] = random.randint(0, 4) # 假设动作空间为5
# 返回基于假设动作的预期奖励(这里简化)
return random.uniform(0, 1)非平稳环境处理
code-snippet__js
class OpponentModelingAgent:
"""具有对手建模能力的智能体"""
def __init__(self, agent_id: int, own_action_space: int, opponent_action_space: int):
self.agent_id = agent_id
self.own_action_space = own_action_space
self.opponent_action_space = opponent_action_space
# 对手模型:记录对手行为模式
self.opponent_models = {} # agent_id -> model
self.action_frequency = {} # 记录对手动作频率
def update_opponent_model(self, opponent_id: str, opponent_action: int):
"""更新对手模型"""
if opponent_id not in self.action_frequency:
self.action_frequency[opponent_id] = [0] * self.opponent_action_space
self.action_frequency[opponent_id][opponent_action] += 1
def predict_opponent_action(self, opponent_id: str) -> int:
"""预测对手动作"""
if opponent_id not in self.action_frequency:
return random.randint(0, self.opponent_action_space - 1)
# 使用频率最高的动作作为预测
freq = self.action_frequency[opponent_id]
return freq.index(max(freq))
def adapt_strategy(self, opponent_predictions: List[int]) -> int:
"""根据对手预测调整策略"""
# 这里可以实现对抗性策略
# 比如在石头剪刀布中,如果预测对手出石头,则出布
pass
def demonstrate_challenges():
print("\n=== 多智能体学习挑战演示 ===")
print("1. 信用分配问题:")
print(" - 问题: 如何将团队奖励分配给各个智能体")
print(" - 解决: 使用贡献度分析、注意力机制等")
print("\n2. 非平稳环境:")
print(" - 问题: 其他智能体学习导致环境动态变化")
print(" - 解决: 对手建模、策略稳定性技术")
print("\n3. 通信约束:")
print(" - 问题: 智能体间通信可能受限")
print(" - 解决: 通信学习、注意力机制")
print("\n4. 探索困境:")
print(" - 问题: 个体探索可能损害团队利益")
print(" - 解决: 集中训练分散执行、内在动机")
if __name__ == "__main__":
test_simple_cooperative_env()
test_independent_learning()
test_qmix()
test_predator_prey()
demonstrate_challenges()MARL算法选择指南
算法适用场景
| 算法类型 | 适用场景 | 优点 | 缺点 |
| 独立Q学习 | 简单协作任务 | 实现简单,计算效率高 | 可能收敛到次优解 |
| QMIX | 协作任务 | 全局最优保证 | 实现复杂,需要全局状态 |
| MADDPG | 连续动作空间 | 处理连续动作 | 样本效率低 |
| COMA | 部分可观测环境 | 解决信用分配 | 方差较大 |
选择原则
- 任务性质:协作vs竞争vs混合
- 观测类型:完全可观测vs部分可观测
- 动作空间:离散vs连续
- 通信需求:是否需要显式通信
实践练习
-
实现一个MADDPG算法应用于连续动作空间的多智能体环境。
-
扩展捕食者-猎物环境,增加障碍物和更复杂的地形。
-
创建一个MARL算法比较框架,评估不同算法在不同环境下的性能。
总结
本节课详细介绍了多智能体强化学习的基本概念、环境建模方法和主要算法。MARL是一个活跃的研究领域,面临着许多独特的挑战,但也为解决复杂的多智能体协作和竞争问题提供了强大工具。
假如你从2026年开始学大模型,按这个步骤走准能稳步进阶。
接下来告诉你一条最快的邪修路线,
3个月即可成为模型大师,薪资直接起飞。
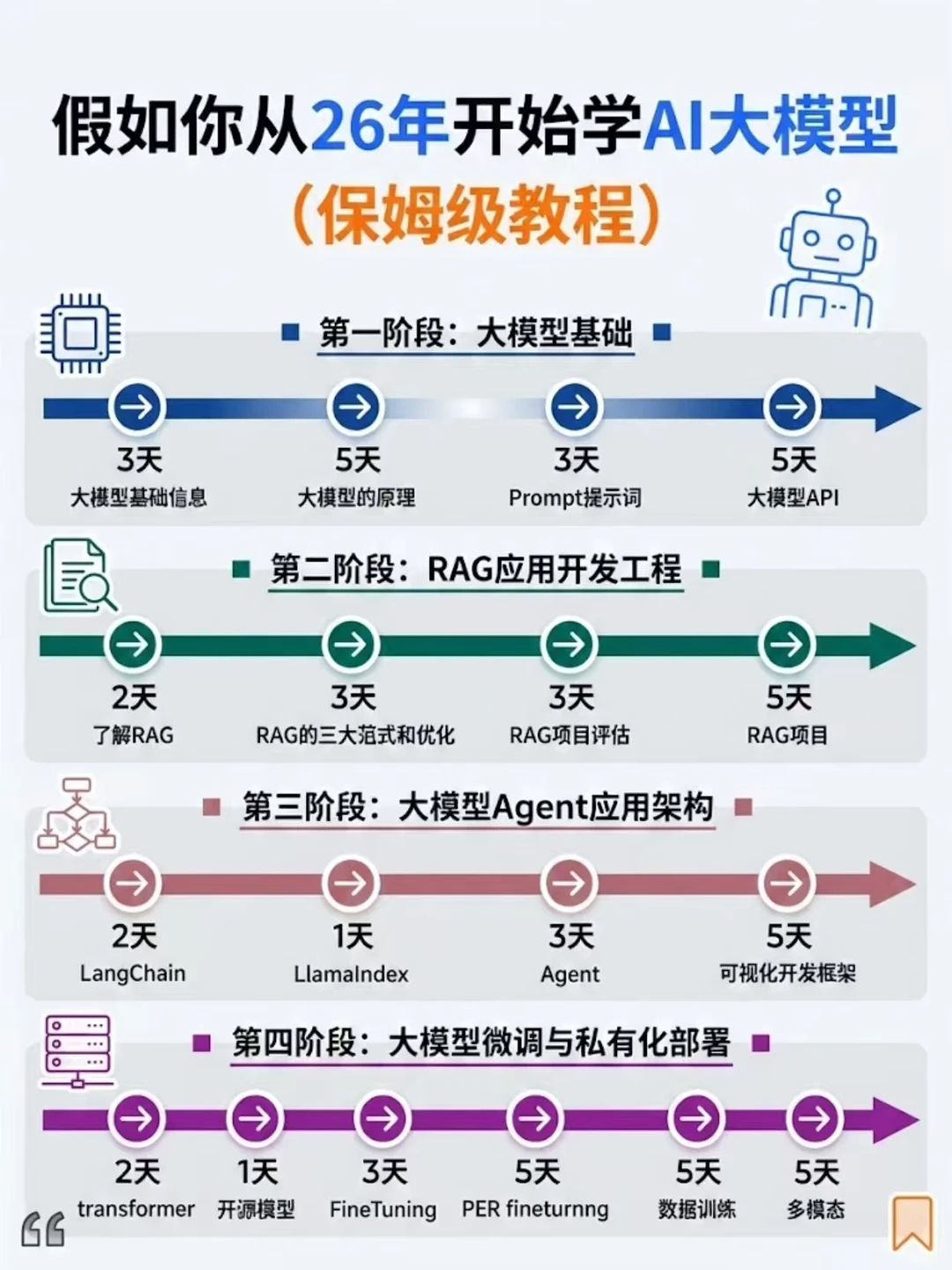
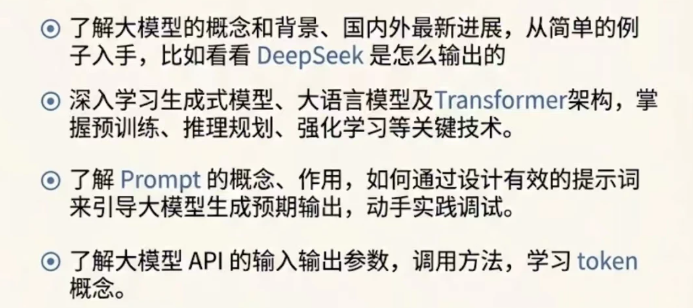
阶段1:大模型基础
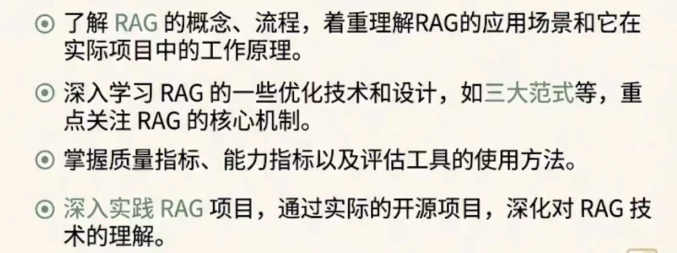
阶段2:RAG应用开发工程
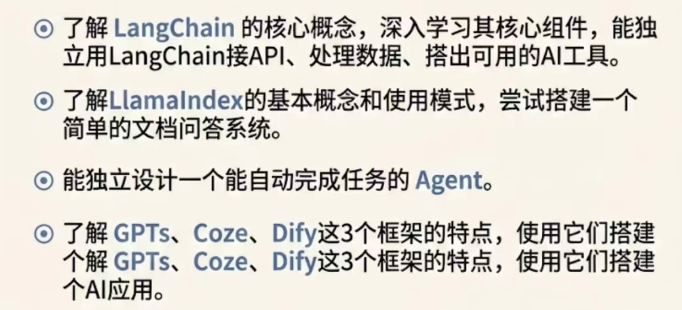
阶段3:大模型Agent应用架构
阶段4:大模型微调与私有化部署
配套文档资源+全套AI 大模型 学习资料,朋友们如果需要可以微信扫描下方二维码免费领取【保证100%免费】👇👇


配套文档资源+全套AI 大模型 学习资料,朋友们如果需要可以微信扫描下方二维码免费领取【保证100%免费】👇👇
