0 前言
在前一节我们讨论了基于ESO的无模型电流预测控制的原理与仿真实现。从动态性能、稳态性能以及谐波性能的角度考虑,这种方案都是一个值得被考虑和值得被探索的方案。虽然目前工业界仍然以PI为主要电流控制器,但是仍然具备研究价值。DPCC这种纯开环的可能不太行,DPCC+ESO,DPCC+参数辨识也有许多解决方案,但是目前来看无模型预测电流控制从参数鲁棒性和快速性的角度都取得了较好的效果。
1 比例增益对控制性能的影响
我们按照控制变量法来观察影响,标称值的比例增益为电感的倒数,设定此时为最优值αo\alpha_oαo,观测器带宽控制不变为 6000 rad/srad/srad/s。仿真分别测试0.25αo\alpha_oαo,0.5αo\alpha_oαo,0.75αo\alpha_oαo,1αo\alpha_oαo,1.5αo\alpha_oαo,2αo\alpha_oαo,4αo\alpha_oαo控制效果。从三个角度评价控制性能:
- 第一个角度仍然是跟随特性(电流超调、调节时间)
- 第二个角度是1000rpm额定负载工况稳态跟踪性能(稳态误差,电流idiq峰峰值),
- 第三个是1000rpm额定负载工况谐波性能(电流THD)
第一个:0.25αo\alpha_oαo
系统不稳定,控制振荡,转速无法跟踪,电流剧烈振荡,无法观察跟随趋势;相电流谐波含量巨大;
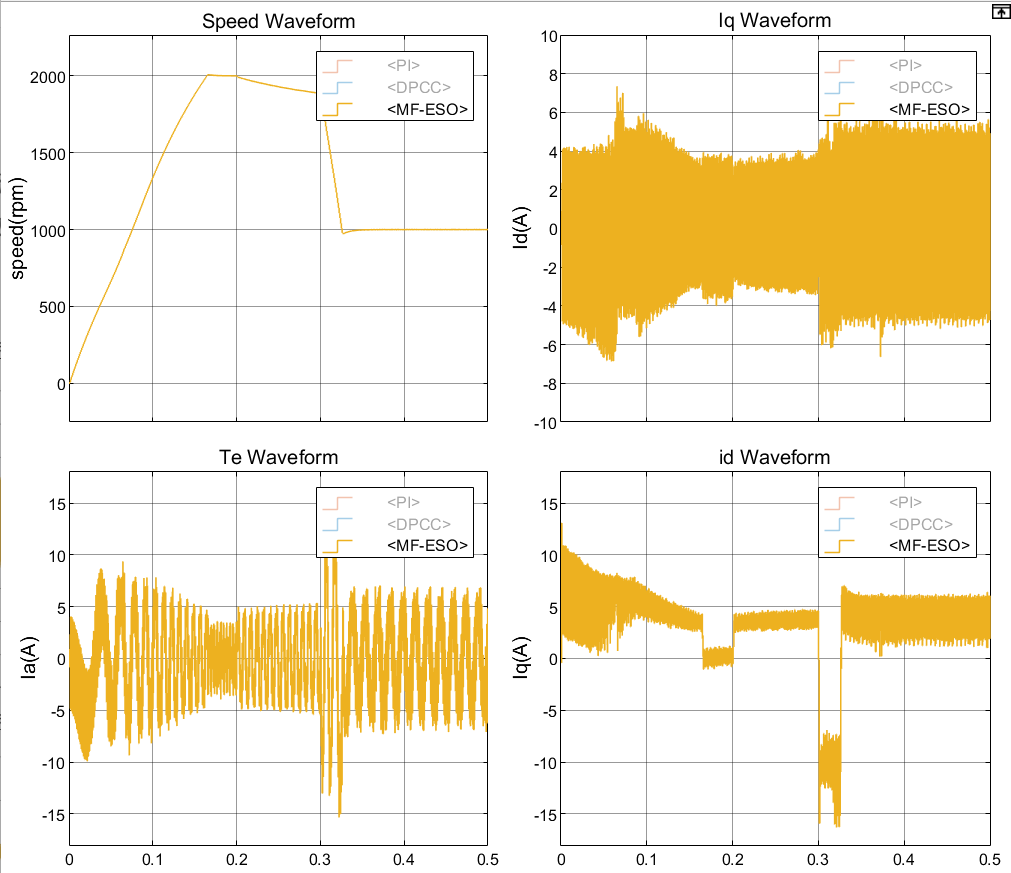
第二个:0.5αo\alpha_oαo
系统不稳定,振荡严重,非直接发散;转速可以跟踪,电流剧烈振荡,无法观察超调等指标;相电流谐波含量巨大;d轴波动未见改善,q轴电流波动改善明显。
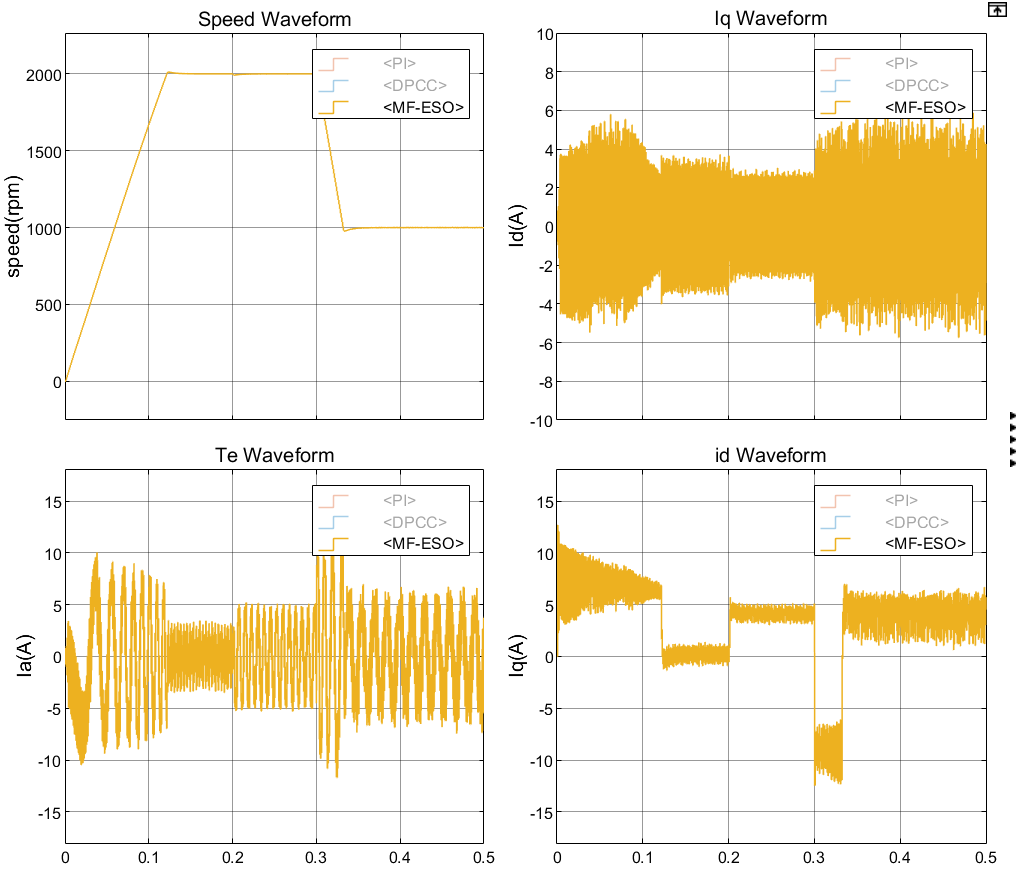
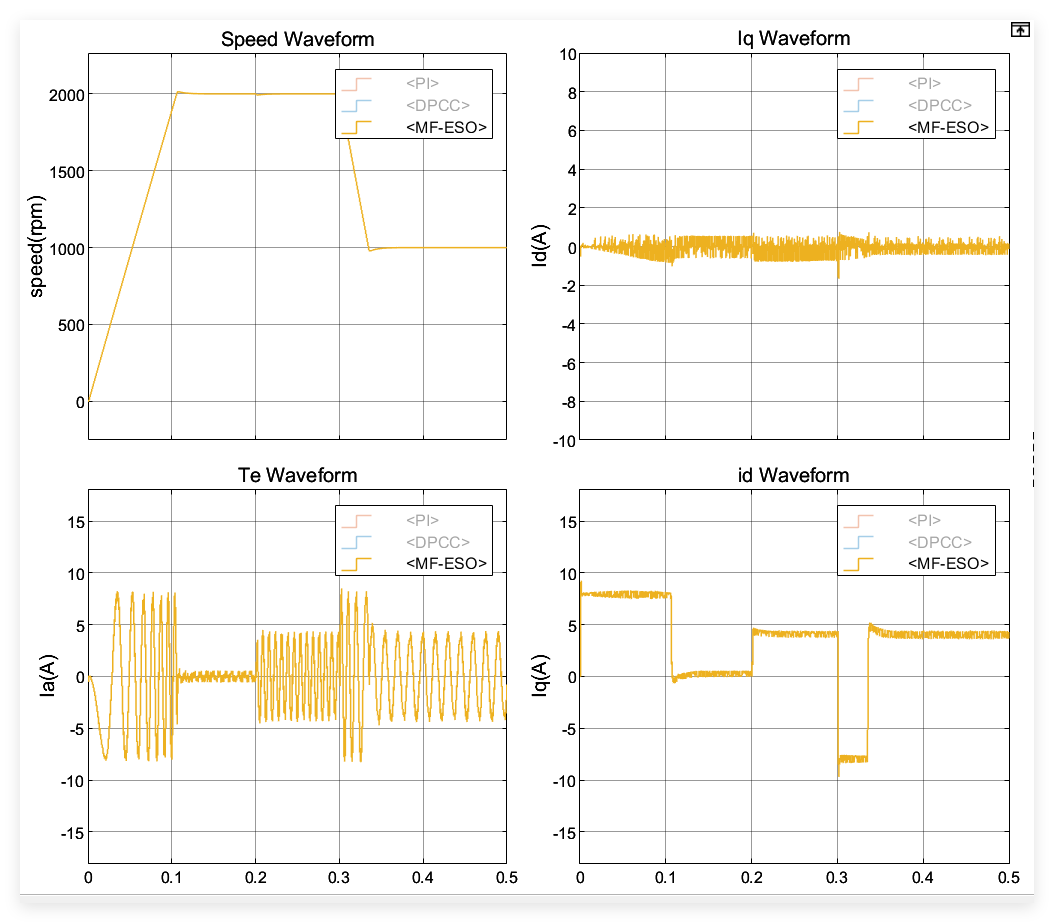
第三个:0.75αo\alpha_oαo
系统稳定,振荡明显减小;转速可以跟踪,电流无剧烈振荡,可观察电流超调与调节时间;相电流谐波含量中等;d轴波动明显改善,q轴电流波动改善明显。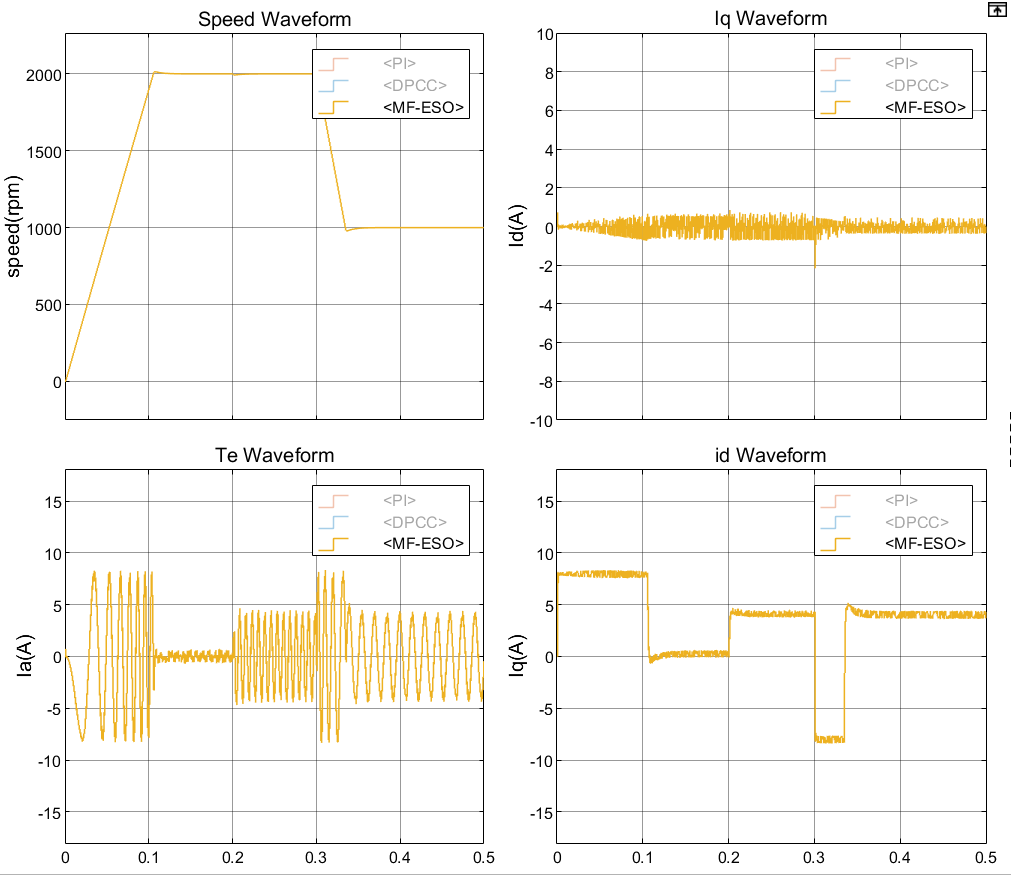
第三个:αo\alpha_oαo
系统稳定,振荡开始增大;转速可以跟踪,电流无剧烈振荡,可观察电流超调与调节时间;相电流谐波含量较低;d轴波动明显改善,q轴电流波动改善明显。
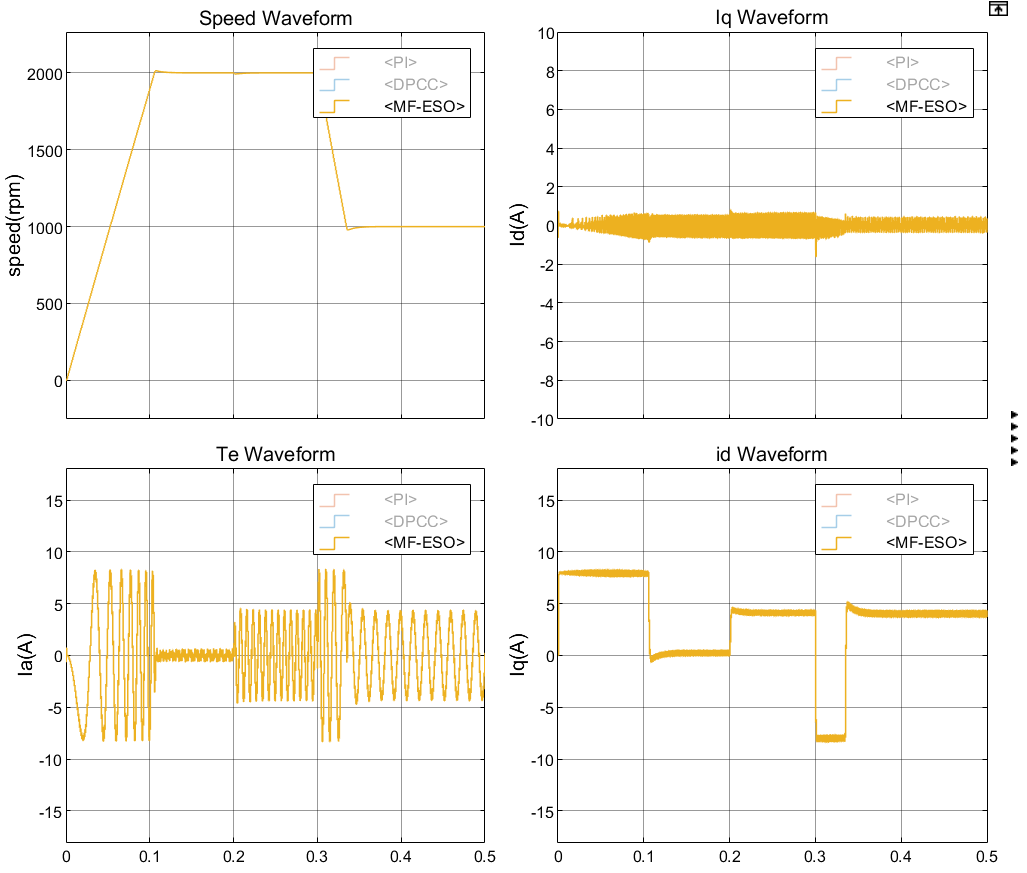
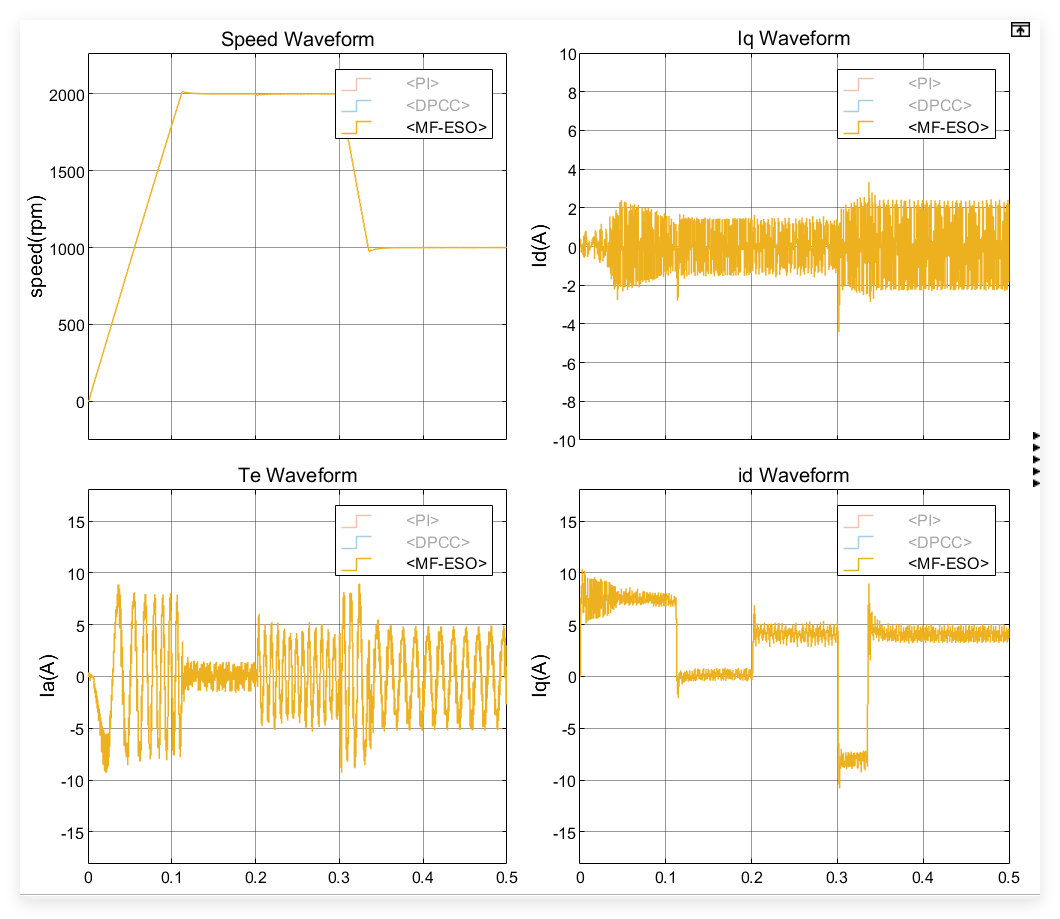
第四个:1.5αo\alpha_oαo
系统稳定,振荡增大;转速可以跟踪,电流无剧烈振荡,可观察电流超调与调节时间;相电流谐波含量较低;d轴波动略微增大,q轴电流波动开始增大。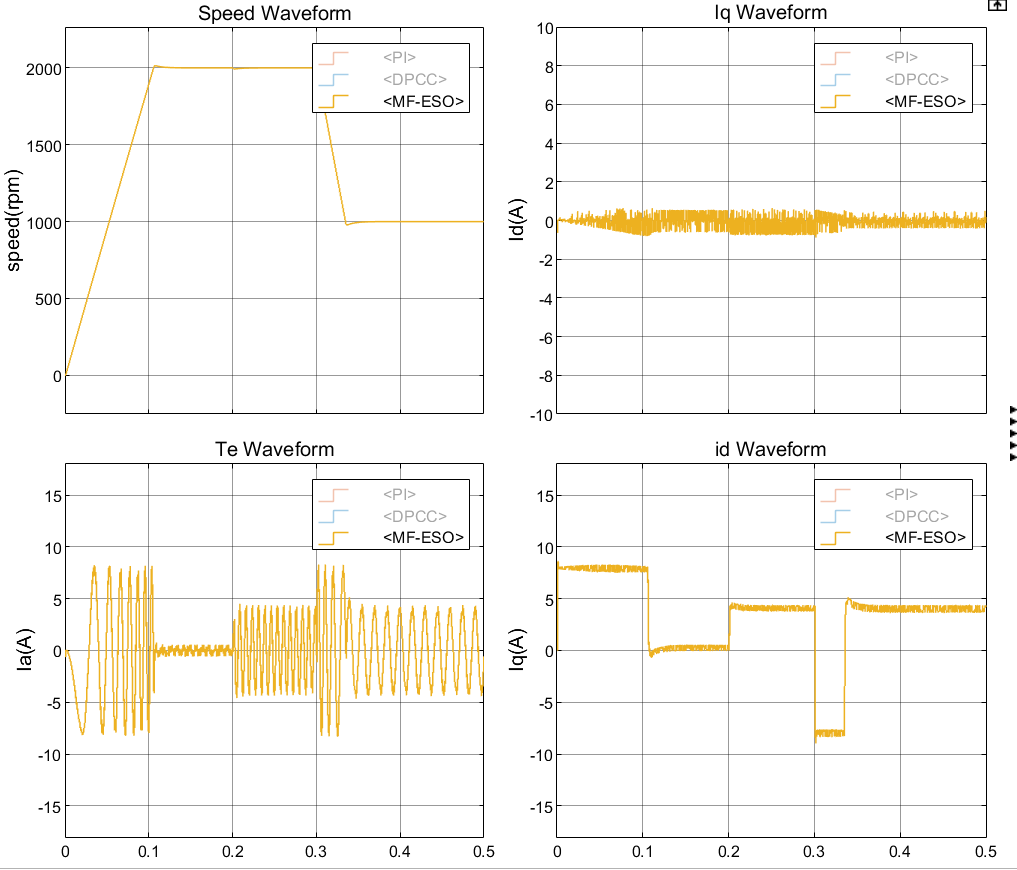
第五个:2αo\alpha_oαo
系统稳定,振荡明显增大;转速可以跟踪,电流开始出现振荡,可观察电流超调与调节时间;相电流谐波含量中等;d轴波动较为明显,q轴电流波动明显。
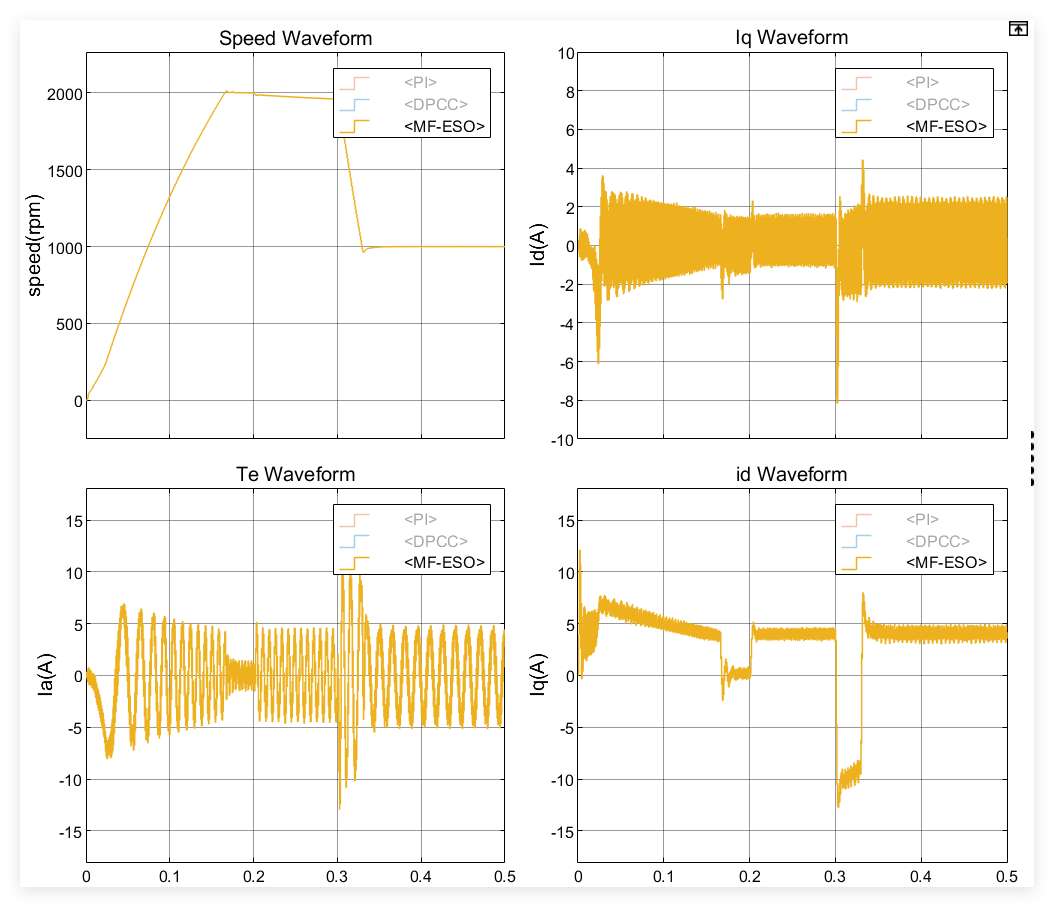
第六个:4αo\alpha_oαo
系统趋近不稳定,振荡明显增大;转速可以跟踪,电流剧烈振荡,不可观察电流超调与调节时间;相电流谐波含量中等;d轴波动明显改善,q轴电流波动明显。
第七个:8αo\alpha_oαo
系统趋近不稳定,振荡明显;转速无法跟踪,电流剧烈振荡,不可观察电流超调与调节时间;相电流谐波含量巨大;d轴波动明显,q轴电流波动明显。
整体整理为如下表格:
| 标称增益α (%) | 跟随时间(ms) | 电流超调(A) | id静态误差(A) | iq静态误差(A) | id峰峰值(A) | iq峰峰值(A) | 电流THD(%) |
|---|---|---|---|---|---|---|---|
| 0.25 | × | × | 0.25 | 3.5 | 12.53 | 5.25 | 77.89% |
| 0.5 | × | × | 0.2 | 2.1 | 11.67 | 5.39 | 68.36% |
| 0.75 | 1.738 ms | 1.09 A | 0 | 0 | 0.897 | 0.8195 | 5.35% |
| 1 | 0.81 ms | 0 A | 0 | 0 | 0.856 | 0.7937 | 5.41% |
| 1.5 | 1.574 ms | 0.68 A | 0 | 0 | 0.91 | 0.839 | 5.75% |
| 2 | 2.035 ms | 1.18 A | 0 | 0 | 0.99 | 1.21 | 6.23% |
| 4 | × | × | 0.2 | 1.2 | 4.777 | 2.017 | 32.41% |
| 8 | × | × | 0.3 | 2.8 | 4.76 | 1.96 | 32.25% |
基于以上分析,可知确实alpha在保持为电感倒数的时候,其综合性能最优。