0 前言
在上一节中我们复现了一篇基于内模的改进型ESO无模型预测控制的论文。在进行探究的过程中,我们可以发现一个很有意思的点,就是整个模型将高频扰动模型引入了观测器模型,形成了一个单位增益无相位延迟的高频扰动抑制方法,我个人觉得是很新颖的。但是另一方面,其观测器参数设置形式涉及到带宽的四次方项,这与高阶ESO的思路非常一致。那么我们就一次性的把高阶的ESO都做了看看效果如何。
1 三阶ESO的设计原理
此时我们暂且认为三阶和四阶的提升原理类似,我们先复现3阶次ESO的谐波抑制效果。
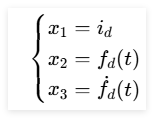
首先定义状态变量:
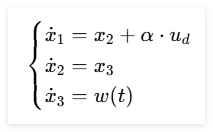
得到标准的状态空间方程:
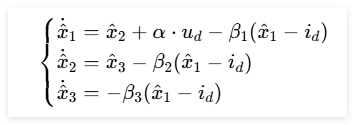
基于上述扩张模型,设计线性扩张状态观测器:
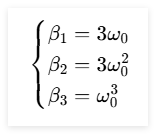
极点配置法增益设计:为保证观测器全局稳定且动态性能一致,将观测器的3 个闭环极点全部配置在。
观测器的特征方程:
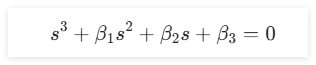
期望极点配置的特征方程:

系数对比得到三阶 LESO 标准增益公式
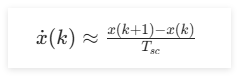
采用欧拉前向差分法离散化,离散化规则为:
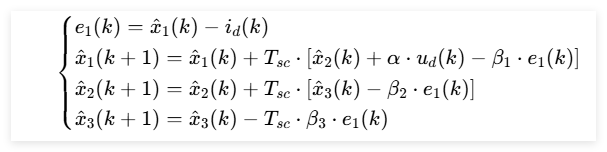
将观测器离散化,得到最终代码可直接实现的递推公式:(q轴与此同理)
2 仿真结果分析
2.1 标称参数仿真结果
A.阶跃电流跟踪快速性对比
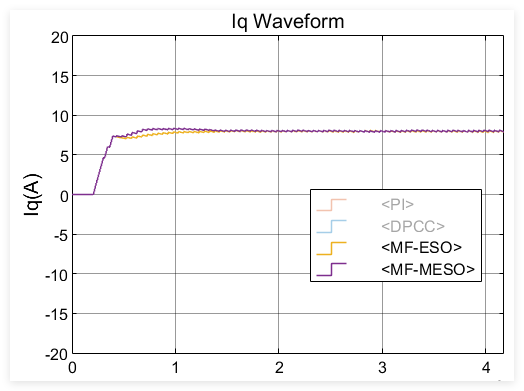
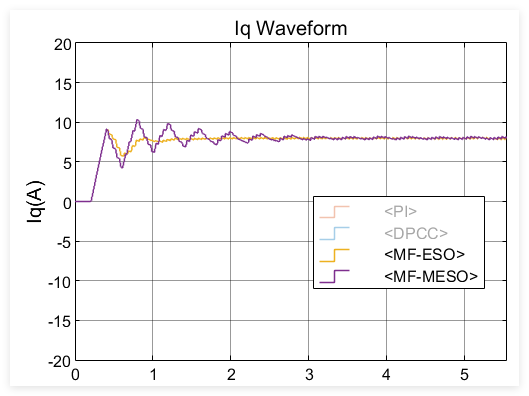
下图紫色为三阶ESO波形,橙色为二阶ESO波形;在带宽参数设置相同的情况下5000rad/s,三阶ESO具备更快的响应速度。
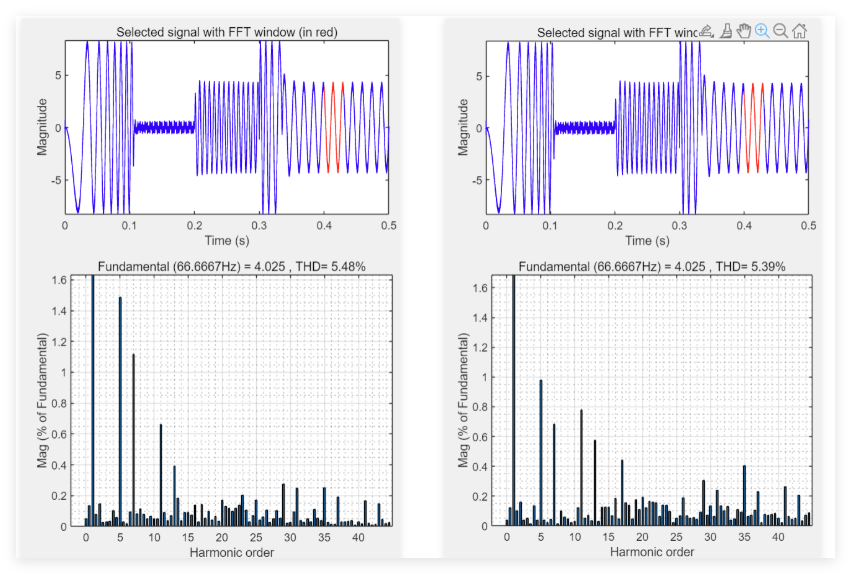
B. 电流THD对比
对1000rpm的额定负载工况相电流FFT进行分析,下图左图为二阶ESO,右图为三阶ESO,可以看到三阶ESO相对来说5次、7次谐波更低,但是11次、13次谐波幅值更高。整体来看电流谐波THD并没有降低多少,二阶ESO的THD为5.48%,而三阶ESO的THD为5.39%,仅仅只低了百分之0.09%。
2.2 非标称参数仿真结果
此时仿真中的电感参数调大为原来的1.3倍,再来观察两者之间的区别。
A.阶跃电流跟踪快速性对比
下图紫色为三阶ESO波形,橙色为二阶ESO波形;在带宽参数设置相同的情况下5000rad/s,三阶ESO具备更快的响应速度,但是同样也具备更大的振荡幅值,且其振荡过程所持续的时间明显长于二阶ESO。
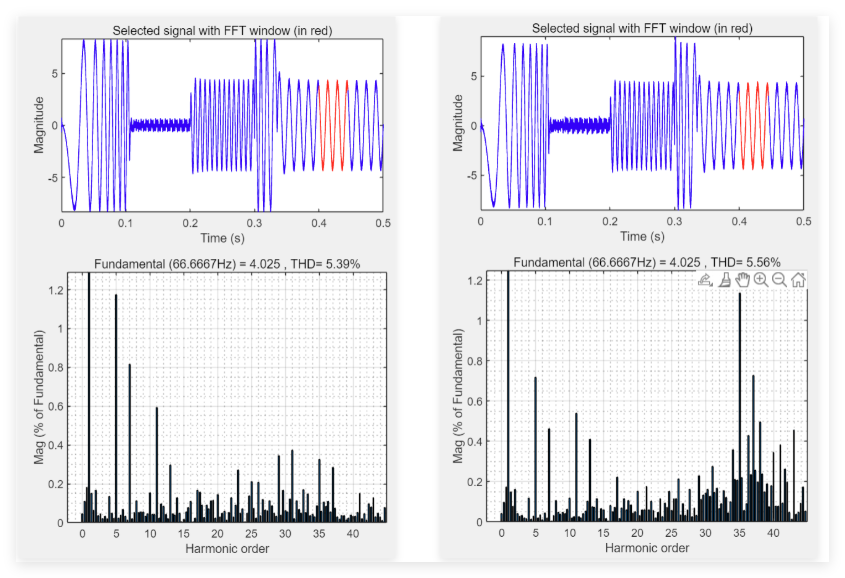
B.电流THD对比
对1000rpm的额定负载工况相电流FFT进行分析,下图左图为二阶ESO,右图为三阶ESO,可以看到三阶ESO相对来说5次、7次谐波更低,但是13次谐波幅值更高,更高频次的高频谐波幅值更高。整体来看电流谐波THD,二阶ESO的THD为5.39%,而三阶ESO的THD为5.56%,相对来说三阶ESO的THD更大。
总结:
(1)高阶ESO在标称参数情况下具备更快的电流响应速度以及更小的电流THD,具备更好的谐波抑制效果。
(2)高阶ESO的参数鲁棒性更差,在相同参数失配的情况下,电流跟踪过程出现明显振荡,且振荡幅值相对二阶ESO更大,振荡时间更长。且高阶ESO表现出更高的电流THD,20次以上的高频谐波明显增大。
存在一点疑惑的点:为什么相同带宽下,电流THD在参数存在偏差的时候反而更小了,5次和7次谐波幅值反而更低了?