摘要
多无人机编队协同作业在巡检、侦察、应急救援等领域具有广泛应用前景,但其安全运行面临机间避碰、环境障碍规避、编队保持与实时响应等多重挑战。传统路径规划方法存在实时性差、安全约束难以严格保障、分布式协同能力不足等问题。针对上述问题,本文开展基于控制障碍函数(Control Barrier Function, CBF)的多无人机编队避障路径规划研究,核心是将各类安全约束转化为可计算的数学条件,结合二次规划(Quadratic Programming, QP)实现最小干预式控制,在保障系统安全的前提下完成编队任务。本文首先阐述CBF基础理论与多无人机编队动力学建模,随后设计分布式CBF-QP控制框架,整合机间避碰、环境避障、编队保持及执行器饱和等约束,提出改进策略提升系统鲁棒性与机动性;通过仿真实验验证所提方法在静态、动态障碍场景下的有效性,对比传统方法验证其在实时性、安全性与编队稳定性上的优势。研究结果表明,所提方法能够实现多无人机编队的实时安全避障与稳定编队保持,具备较强的抗扰动能力与分布式协同性能,为多无人机集群的工程化应用提供理论支撑与技术参考。
关键词:多无人机编队;控制障碍函数;避障路径规划;二次规划;分布式协同控制
1 绪论
1.1 研究背景与意义
随着无人机技术、通信技术与控制技术的快速发展,多无人机编队协同作业逐渐替代单无人机,成为复杂场景下作业的首选方案。多无人机通过编队协同,能够实现单无人机难以完成的大规模、高精度任务,如电力巡检、城市安防、灾后搜救、农业植保等。然而,多无人机编队在运行过程中,需同时满足多重约束:一是机间避碰约束,避免无人机之间发生碰撞;二是环境避障约束,规避飞行区域内的静态障碍(如建筑物、山体)与动态障碍(如鸟类、其他飞行器);三是编队保持约束,维持预设的编队几何形态,确保协同作业精度;四是执行器饱和约束,保证控制输入在无人机物理性能范围内。
当前多无人机编队避障路径规划方法仍存在诸多不足:传统全局规划方法(如A*、RRT*)虽能生成最优路径,但实时性差,难以适应动态环境与在线闭环控制需求;人工势场法易陷入局部最优、产生控制震颤,且难以处理多约束耦合问题;模型预测控制(MPC)虽能兼顾多约束,但计算复杂度随无人机数量指数增长,无法满足大规模集群的实时控制需求;行为规则法鲁棒性不足,缺乏严格的数学安全保障。
控制障碍函数(CBF)基于不变集理论,能够将安全约束转化为线性或非线性不等式约束,结合二次规划可实现最小干预式控制,具备安全可证、计算高效、约束灵活等优势,为解决多无人机编队避障问题提供了新的技术路径。开展基于CBF的多无人机编队避障路径规划研究,不仅能够完善多无人机协同控制的理论体系,还能提升编队作业的安全性与可靠性,推动多无人机集群在复杂场景中的工程化应用,具有重要的理论意义与实际应用价值。
1.2 国内外研究现状
1.2.1 多无人机编队避障路径规划研究现状
多无人机编队避障路径规划的核心是在满足多重约束的前提下,为每个无人机规划安全、高效的飞行路径,同时维持编队一致性。目前,相关研究主要分为三类:全局路径规划、局部路径规划与分布式路径规划。
全局路径规划基于环境先验信息,生成全局最优路径,典型方法包括A*算法、Dijkstra算法、RRT*算法及其改进版本。这类方法能够保证路径的全局最优性,但对环境动态变化的适应性差,实时性不足,难以应对突发障碍。局部路径规划无需环境先验信息,通过传感器实时感知环境,动态调整路径,典型方法有人工势场法、滑动窗口法、模型预测控制等。人工势场法结构简单、计算量小,但易陷入局部最优,且在障碍物密集区域易产生震颤;模型预测控制能够兼顾多约束与路径优化,但计算复杂度高,实时性难以满足大规模集群需求。
分布式路径规划基于多智能体协同理论,每个无人机仅需获取邻居节点信息,通过局部交互实现全局编队避障,适配大规模集群应用。近年来,分布式一致性控制、分布式优化等方法被广泛应用于多无人机编队避障,但其安全约束的严格性与实时性仍需提升。
1.2.2 控制障碍函数(CBF)研究现状
CBF由Ames等人于2014年提出,最初用于单智能体的安全控制,其核心思想是通过构造障碍函数定义安全集,利用李导数推导安全约束条件,确保系统状态始终处于安全集内。随着研究的深入,CBF被拓展到多智能体协同控制领域,成为多智能体安全避障的核心技术之一。
目前,CBF在多无人机领域的研究主要集中在三个方面:一是CBF的构造方法,针对机间避碰、环境避障、编队保持等不同约束,设计适配多无人机动力学特性的障碍函数;二是CBF与优化算法的结合,将CBF约束转化为二次规划问题,求解满足安全约束的最优控制输入;三是改进CBF以提升系统性能,如高阶CBF(HOCBF)用于处理高阶动力学系统,图CBF(GCBF)用于大规模集群协同,鲁棒CBF用于处理外界扰动与模型不确定性。
国外研究起步较早,Ames团队提出了CBF-QP控制框架,实现了多无人机的安全避障与编队控制;MIT、斯坦福大学等机构进一步提出了分布式CBF、鲁棒CBF等改进方法,验证了其在大规模集群中的有效性。国内研究近年来发展迅速,高校与科研机构围绕CBF的构造、分布式协同、复杂环境适配等方面开展了大量研究,取得了一系列成果,但在动态障碍处理、保守性优化、硬件实飞验证等方面仍与国外存在差距。
1.3 研究内容与技术路线
1.3.1 研究内容
本文围绕基于CBF的多无人机编队避障路径规划展开研究,具体研究内容如下:
-
多无人机编队动力学建模与安全约束分析。建立多无人机编队的仿射非线性动力学模型,明确机间避碰、环境避障、编队保持、执行器饱和等核心安全约束的数学表达,为后续CBF构造与控制框架设计奠定基础。
-
多约束融合的CBF构造方法研究。针对不同安全约束,设计适配多无人机系统的CBF,包括机间避碰CBF、环境避障CBF、编队保持CBF与输入饱和CBF,推导各CBF的安全约束条件,实现多约束的统一建模。
-
分布式CBF-QP编队避障控制框架设计。结合标称控制律与CBF安全约束,构建分布式二次规划优化问题,实现最小干预式控制,确保在满足所有安全约束的前提下,维持编队稳定性与路径跟踪性能;针对约束可行性问题,提出改进策略提升系统鲁棒性。
-
仿真实验与性能验证。搭建多无人机编队避障仿真平台,设计静态障碍、动态障碍、大规模集群等不同场景,验证所提方法的有效性;与传统人工势场法、MPC方法进行对比,分析其在实时性、安全性、编队稳定性上的优势。
1.3.2 技术路线
本文的技术路线如下:首先,梳理多无人机编队避障与CBF的研究现状,明确研究难点与研究目标;其次,建立多无人机动力学模型,分析核心安全约束;然后,构造多约束融合的CBF,设计分布式CBF-QP控制框架并提出改进策略;接着,通过仿真实验验证所提方法的性能;最后,总结研究成果,分析现存问题,展望未来研究方向。技术路线图如图1所示(此处可插入技术路线图,仿真时补充)。
1.4 研究创新点
本文的创新点主要体现在以下三个方面:
-
提出一种多约束融合的CBF构造方法,将机间避碰、环境避障、编队保持与输入饱和约束统一建模,解决传统方法约束耦合处理困难的问题,提升安全约束的全面性与严谨性。
-
设计一种改进的分布式CBF-QP控制框架,引入可行性增强机制,解决分布式场景下邻居控制不可知导致的约束不可行问题,提升编队避障的成功率与鲁棒性。
-
通过多场景仿真对比,验证所提方法在实时性、安全性与编队稳定性上的优势,为多无人机大规模集群的安全协同控制提供新的技术方案。
2 相关理论基础
2.1 多无人机编队动力学建模
2.1.1 单无人机动力学模型
本文以多旋翼无人机为研究对象,其运动可分为位置运动与姿态运动,考虑到编队控制的核心是位置跟踪与避障,采用简化的位置动力学模型,忽略姿态运动的耦合影响,建立仿射非线性系统模型:
x˙i=f(xi)+g(xi)ui\dot{x}_i = f(x_i) + g(x_i)u_ix˙i=f(xi)+g(xi)ui
其中,xi∈R3x_i \in \mathbb{R}^3xi∈R3 为第iii架无人机的位置状态向量,即xi=xi1,xi2,xi3Tx_i = x_{i1}, x_{i2}, x_{i3}^Txi=xi1,xi2,xi3T,分别表示无人机在三维空间中xxx、yyy、zzz轴的位置;ui∈R3u_i \in \mathbb{R}^3ui∈R3 为第iii架无人机的控制输入向量,对应三维空间中的加速度;f(xi)f(x_i)f(xi) 为系统标称动力学项,考虑重力与空气阻力,简化为f(xi)=0,0,−gTf(x_i) = 0, 0, -g^Tf(xi)=0,0,−gT(ggg为重力加速度);g(xi)g(x_i)g(xi) 为控制输入矩阵,简化为单位矩阵I3×3I_{3\times3}I3×3。
该模型结构简单、计算高效,能够满足编队避障路径规划的实时性需求,同时保留了无人机位置运动的核心特性,适用于多无人机编队协同控制场景。
2.1.2 多无人机编队动力学模型
多无人机编队系统由NNN架无人机组成,定义编队系统的整体状态向量为X=x1T,x2T,...,xNTT∈R3NX = x_1\^T, x_2\^T, \\dots, x_N\^T^T \in \mathbb{R}^{3N}X=x1T,x2T,...,xNTT∈R3N,整体控制输入向量为U=u1T,u2T,...,uNTT∈R3NU = u_1\^T, u_2\^T, \\dots, u_N\^T^T \in \mathbb{R}^{3N}U=u1T,u2T,...,uNTT∈R3N。则多无人机编队的整体动力学模型可表示为:
X˙=F(X)+G(X)U\dot{X} = F(X) + G(X)UX˙=F(X)+G(X)U
其中,F(X)=f(x1)T,f(x2)T,...,f(xN)TTF(X) = f(x_1)\^T, f(x_2)\^T, \\dots, f(x_N)\^T^TF(X)=f(x1)T,f(x2)T,...,f(xN)TT,G(X)=diag(g(x1),g(x2),...,g(xN))G(X) = \text{diag}(g(x_1), g(x_2), \dots, g(x_N))G(X)=diag(g(x1),g(x2),...,g(xN)) 为块对角矩阵。
编队保持的核心是维持各无人机之间的相对位置关系,定义第iii架无人机与第jjj架无人机的相对位置向量为Δxij=xi−xj\Delta x_{ij} = x_i - x_jΔxij=xi−xj,期望相对位置向量为Δxijd\Delta x_{ij}^dΔxijd,则编队误差为eij=Δxij−Δxijde_{ij} = \Delta x_{ij} - \Delta x_{ij}^deij=Δxij−Δxijd,通过控制输入调整,使编队误差收敛至零,实现编队保持。
2.2 控制障碍函数(CBF)基础理论
2.2.1 CBF的核心定义
对于仿射非线性系统x˙=f(x)+g(x)u\dot{x} = f(x) + g(x)ux˙=f(x)+g(x)u,定义安全集C={x∈Rn∣h(x)≥0}\mathcal{C} = \{x \in \mathbb{R}^n | h(x) \ge 0\}C={x∈Rn∣h(x)≥0},其中h(x):Rn→Rh(x): \mathbb{R}^n \to \mathbb{R}h(x):Rn→R 为连续可微函数,称为控制障碍函数(CBF),其核心作用是定义系统的安全边界,当系统状态x∈Cx \in \mathcal{C}x∈C时,系统处于安全状态;当h(x)=0h(x) = 0h(x)=0时,系统处于安全边界;当h(x)<0h(x) < 0h(x)<0时,系统处于危险状态。
为确保系统状态始终处于安全集内,CBF需满足以下安全条件:存在类K函数α(⋅)\alpha(\cdot)α(⋅)(即α(0)=0\alpha(0) = 0α(0)=0,且α(⋅)\alpha(\cdot)α(⋅)严格单调递增),使得对于所有x∈Cx \in \mathcal{C}x∈C,有:
Lfh(x)+Lgh(x)u+α(h(x))≥0L_f h(x) + L_g h(x)u + \alpha(h(x)) \ge 0Lfh(x)+Lgh(x)u+α(h(x))≥0
其中,Lfh(x)=∇h(x)⋅f(x)L_f h(x) = \nabla h(x) \cdot f(x)Lfh(x)=∇h(x)⋅f(x) 为h(x)h(x)h(x)关于f(x)f(x)f(x)的李导数,Lgh(x)=∇h(x)⋅g(x)L_g h(x) = \nabla h(x) \cdot g(x)Lgh(x)=∇h(x)⋅g(x) 为h(x)h(x)h(x)关于g(x)g(x)g(x)的李导数,∇h(x)\nabla h(x)∇h(x) 为h(x)h(x)h(x)的梯度。
该安全条件的物理意义是:系统状态在安全集内时,通过合理选择控制输入uuu,能够保证障碍函数h(x)h(x)h(x)的变化率非负,即系统状态不会从安全集内脱离,从而实现严格的安全保障。
2.2.2 CBF的分类与特性
根据系统相对阶的不同,CBF可分为一阶CBF与高阶CBF(HOCBF)。一阶CBF适用于相对阶为1的系统,其安全条件可直接转化为控制输入的线性约束;高阶CBF适用于相对阶大于1的系统(如固定翼无人机、带有姿态耦合的多旋翼无人机),通过引入高阶李导数,将安全约束转化为高阶线性约束,解决复杂动力学系统的安全控制问题。
CBF具有以下核心特性:
-
安全可证:基于不变集理论,从数学上严格证明系统状态始终处于安全集内,能够有效避免碰撞等危险情况。
-
最小干预:安全约束仅在系统接近安全边界时生效,对控制输入的修正最小,最大程度保留原有标称控制的意图,保证系统的机动性与控制性能。
-
计算高效:安全约束可转化为凸二次规划问题,求解速度快,能够满足多无人机编队避障的实时性需求。
-
约束灵活:可针对不同类型的安全约束(如避碰、编队保持、输入饱和)构造对应的CBF,实现多约束的统一建模与协同控制。
2.3 二次规划(QP)基础
二次规划是一类特殊的凸优化问题,其目标函数为二次函数,约束条件为线性等式或不等式约束,具有唯一最优解,且求解效率高,是CBF控制框架的核心优化工具。
标准二次规划问题的形式为:
minu12uTPu+qTu\min_{u} \quad \frac{1}{2}u^T P u + q^T uminu21uTPu+qTu
s.t.Au≥b\text{s.t.} \quad A u \ge bs.t.Au≥b
Cu=d\quad \quad C u = dCu=d
其中,u∈Rmu \in \mathbb{R}^mu∈Rm 为优化变量(本文中为无人机控制输入);P∈Rm×mP \in \mathbb{R}^{m \times m}P∈Rm×m 为对称半正定矩阵;q∈Rmq \in \mathbb{R}^mq∈Rm 为系数向量;A∈Rp×mA \in \mathbb{R}^{p \times m}A∈Rp×m、b∈Rpb \in \mathbb{R}^pb∈Rp 为不等式约束系数矩阵与向量;C∈Rq×mC \in \mathbb{R}^{q \times m}C∈Rq×m、d∈Rqd \in \mathbb{R}^qd∈Rq 为等式约束系数矩阵与向量。
在多无人机编队避障场景中,QP的目标函数通常设计为最小化控制输入与标称控制的偏差,约束条件为CBF推导的安全约束与执行器饱和约束,通过求解QP问题,可得到满足所有安全约束的最优控制输入。
2.4 分布式协同控制基础
多无人机编队的分布式协同控制核心是:每个无人机仅需获取自身状态与邻居无人机状态信息,通过局部交互实现全局编队目标,无需中心节点的统一控制,具备良好的扩展性与容错性。
采用图论描述多无人机编队的通信拓扑,定义通信拓扑图G=(V,E)\mathcal{G} = (\mathcal{V}, \mathcal{E})G=(V,E),其中V={1,2,...,N}\mathcal{V} = \{1, 2, \dots, N\}V={1,2,...,N} 为节点集合(对应无人机),E⊆V×V\mathcal{E} \subseteq \mathcal{V} \times \mathcal{V}E⊆V×V 为边集合(对应无人机之间的通信链路)。若节点iii与节点jjj之间存在通信链路,则(i,j)∈E(i, j) \in \mathcal{E}(i,j)∈E,此时无人机iii可获取无人机jjj的状态信息。
定义邻接矩阵A=aijN×NA = a_{ij}{N \times N}A=aijN×N,其中aij=1a{ij} = 1aij=1 若(i,j)∈E(i, j) \in \mathcal{E}(i,j)∈E,否则aij=0a_{ij} = 0aij=0;定义度矩阵D=diag(d1,d2,...,dN)D = \text{diag}(d_1, d_2, \dots, d_N)D=diag(d1,d2,...,dN),其中di=∑j=1Naijd_i = \sum_{j=1}^N a_{ij}di=∑j=1Naij 为节点iii的度;定义拉普拉斯矩阵L=D−AL = D - AL=D−A。当通信拓扑图为连通图时,拉普拉斯矩阵LLL具有唯一的零特征值,对应编队一致性状态,为分布式协同控制提供理论基础。
3 多约束融合的CBF构造方法
3.1 多无人机编队安全约束分析
多无人机编队避障路径规划需满足四类核心安全约束,各类约束的具体要求与数学表达如下:
-
机间避碰约束 :任意两架无人机之间的距离需大于安全距离dsafed_{\text{safe}}dsafe,避免机间碰撞。设第iii架无人机与第jjj架无人机的距离为dij=∥xi−xj∥d_{ij} = \|x_i - x_j\|dij=∥xi−xj∥,则机间避碰约束为dij≥dsafed_{ij} \ge d_{\text{safe}}dij≥dsafe。
-
环境避障约束 :无人机与环境中的静态障碍、动态障碍之间的距离需大于障碍安全裕度dobsd_{\text{obs}}dobs,避免与障碍碰撞。设第iii架无人机到障碍的最小距离为diOd_{iO}diO,则环境避障约束为diO≥dobsd_{iO} \ge d_{\text{obs}}diO≥dobs。
-
编队保持约束 :各无人机之间的相对位置需维持预设的编队几何形态,设期望相对位置向量为Δxijd\Delta x_{ij}^dΔxijd,则编队保持约束为∥xi−xj−Δxijd∥≤ϵ\|x_i - x_j - \Delta x_{ij}^d\| \le \epsilon∥xi−xj−Δxijd∥≤ϵ(ϵ\epsilonϵ为编队误差允许范围)。
-
执行器饱和约束 :无人机的控制输入(加速度)需在物理性能范围内,设控制输入的最小值为uminu_{\text{min}}umin,最大值为umaxu_{\text{max}}umax,则执行器饱和约束为umin≤ui≤umaxu_{\text{min}} \le u_i \le u_{\text{max}}umin≤ui≤umax。
上述约束相互耦合,传统方法难以实现统一建模与协同控制,本文通过构造不同类型的CBF,将各类约束转化为统一的数学条件,实现多约束融合的安全控制。
3.2 机间避碰CBF构造
机间避碰是多无人机编队安全运行的首要条件,针对机间避碰约束,构造机间避碰CBF,确保任意两架无人机之间的距离始终大于安全距离。
定义第iii架无人机与第jjj架无人机的机间避碰CBF为:
hij(x)=dij2−dsafe2=∥xi−xj∥2−dsafe2h_{ij}(x) = d_{ij}^2 - d_{\text{safe}}^2 = \|x_i - x_j\|^2 - d_{\text{safe}}^2hij(x)=dij2−dsafe2=∥xi−xj∥2−dsafe2
当hij(x)≥0h_{ij}(x) \ge 0hij(x)≥0时,dij≥dsafed_{ij} \ge d_{\text{safe}}dij≥dsafe,满足机间避碰约束;当hij(x)=0h_{ij}(x) = 0hij(x)=0时,无人机处于机间避碰安全边界;当hij(x)<0h_{ij}(x) < 0hij(x)<0时,存在机间碰撞风险。
对hij(x)h_{ij}(x)hij(x)求时间导数,结合无人机动力学模型,推导其李导数:
h˙ij(x)=2(xi−xj)T(x˙i−x˙j)=2(xi−xj)Tf(xi)−f(xj)+g(xi)ui−g(xj)uj\dot{h}_{ij}(x) = 2(x_i - x_j)^T (\dot{x}_i - \dot{x}_j) = 2(x_i - x_j)^T f(x_i) - f(x_j) + g(x_i)u_i - g(x_j)u_jh˙ij(x)=2(xi−xj)T(x˙i−x˙j)=2(xi−xj)Tf(xi)−f(xj)+g(xi)ui−g(xj)uj
代入f(xi)=0,0,−gTf(x_i) = 0, 0, -g^Tf(xi)=0,0,−gT、g(xi)=I3×3g(x_i) = I_{3\times3}g(xi)=I3×3,简化得:
h˙ij(x)=2(xi−xj)T(ui−uj)\dot{h}_{ij}(x) = 2(x_i - x_j)^T (u_i - u_j)h˙ij(x)=2(xi−xj)T(ui−uj)
根据CBF安全条件,存在类K函数αij(⋅)\alpha_{ij}(\cdot)αij(⋅),使得:
2(xi−xj)T(ui−uj)+αij(hij(x))≥02(x_i - x_j)^T (u_i - u_j) + \alpha_{ij}(h_{ij}(x)) \ge 02(xi−xj)T(ui−uj)+αij(hij(x))≥0
为简化计算,选取αij(s)=kijs\alpha_{ij}(s) = k_{ij}sαij(s)=kijs(kij>0k_{ij} > 0kij>0为增益系数),则机间避碰安全约束转化为:
2(xi−xj)Tui−2(xi−xj)Tuj+kijhij(x)≥02(x_i - x_j)^T u_i - 2(x_i - x_j)^T u_j + k_{ij} h_{ij}(x) \ge 02(xi−xj)Tui−2(xi−xj)Tuj+kijhij(x)≥0
在分布式架构中,每个无人机仅需考虑与邻居无人机的避碰约束,因此第iii架无人机的机间避碰约束为所有邻居无人机j∈Nij \in \mathcal{N}_ij∈Ni(Ni\mathcal{N}_iNi为无人机iii的邻居集合)对应的约束之和。
3.3 环境避障CBF构造
环境障碍分为静态障碍与动态障碍,本文分别构造对应的环境避障CBF,实现复杂环境下的安全避障。
3.3.1 静态障碍避障CBF
静态障碍(如建筑物、山体)的位置固定,设静态障碍OOO的中心坐标为xOx_OxO,半径为rOr_OrO,定义第iii架无人机到静态障碍的最小距离为diO=∥xi−xO∥−rOd_{iO} = \|x_i - x_O\| - r_OdiO=∥xi−xO∥−rO,则静态障碍避障CBF为:
hiO(x)=diO−dobs=∥xi−xO∥−rO−dobsh_{iO}(x) = d_{iO} - d_{\text{obs}} = \|x_i - x_O\| - r_O - d_{\text{obs}}hiO(x)=diO−dobs=∥xi−xO∥−rO−dobs
当hiO(x)≥0h_{iO}(x) \ge 0hiO(x)≥0时,无人机与静态障碍的距离大于安全裕度,满足环境避障约束。
对hiO(x)h_{iO}(x)hiO(x)求时间导数,推导其李导数:
h˙iO(x)=(xi−xO)T∥xi−xO∥x˙i=(xi−xO)T∥xi−xO∥(f(xi)+ui)\dot{h}_{iO}(x) = \frac{(x_i - x_O)^T}{\|x_i - x_O\|} \dot{x}_i = \frac{(x_i - x_O)^T}{\|x_i - x_O\|} (f(x_i) + u_i)h˙iO(x)=∥xi−xO∥(xi−xO)Tx˙i=∥xi−xO∥(xi−xO)T(f(xi)+ui)
代入f(xi)=0,0,−gTf(x_i) = 0, 0, -g^Tf(xi)=0,0,−gT,结合CBF安全条件,选取类K函数αiO(s)=kiOs\alpha_{iO}(s) = k_{iO}sαiO(s)=kiOs(kiO>0k_{iO} > 0kiO>0),则静态障碍避障安全约束为:
(xi−xO)T∥xi−xO∥ui+(xi−xO)T∥xi−xO∥0,0,−gT+kiOhiO(x)≥0\frac{(x_i - x_O)^T}{\|x_i - x_O\|} u_i + \frac{(x_i - x_O)^T}{\|x_i - x_O\|} 0, 0, -g^T + k_{iO} h_{iO}(x) \ge 0∥xi−xO∥(xi−xO)Tui+∥xi−xO∥(xi−xO)T0,0,−gT+kiOhiO(x)≥0
3.3.2 动态障碍避障CBF
动态障碍(如鸟类、其他飞行器)的位置随时间变化,设动态障碍OtO_tOt的位置状态为xOt(t)x_{O_t}(t)xOt(t),速度为x˙Ot(t)\dot{x}{O_t}(t)x˙Ot(t),半径为rOr_OrO,定义第iii架无人机到动态障碍的最小距离为diOt=∥xi−xOt(t)∥−rOd{iO_t} = \|x_i - x_{O_t}(t)\| - r_OdiOt=∥xi−xOt(t)∥−rO,则动态障碍避障CBF为:
hiOt(x,t)=diOt−dobs=∥xi−xOt(t)∥−rO−dobsh_{iO_t}(x, t) = d_{iO_t} - d_{\text{obs}} = \|x_i - x_{O_t}(t)\| - r_O - d_{\text{obs}}hiOt(x,t)=diOt−dobs=∥xi−xOt(t)∥−rO−dobs
对hiOt(x,t)h_{iO_t}(x, t)hiOt(x,t)求时间导数,考虑动态障碍的运动,推导其李导数:
h˙iOt(x,t)=(xi−xOt(t))T∥xi−xOt(t)∥(x˙i−x˙Ot(t))\dot{h}{iO_t}(x, t) = \frac{(x_i - x{O_t}(t))^T}{\|x_i - x_{O_t}(t)\|} (\dot{x}i - \dot{x}{O_t}(t))h˙iOt(x,t)=∥xi−xOt(t)∥(xi−xOt(t))T(x˙i−x˙Ot(t))
代入无人机动力学模型与动态障碍速度,结合CBF安全条件,选取类K函数αiOt(s)=kiOts\alpha_{iO_t}(s) = k_{iO_t}sαiOt(s)=kiOts(kiOt>0k_{iO_t} > 0kiOt>0),则动态障碍避障安全约束为:
(xi−xOt(t))T∥xi−xOt(t)∥ui+(xi−xOt(t))T∥xi−xOt(t)∥(0,0,−gT−x˙Ot(t))+kiOthiOt(x,t)≥0\frac{(x_i - x_{O_t}(t))^T}{\|x_i - x_{O_t}(t)\|} u_i + \frac{(x_i - x_{O_t}(t))^T}{\|x_i - x_{O_t}(t)\|} (0, 0, -g^T - \dot{x}{O_t}(t)) + k{iO_t} h_{iO_t}(x, t) \ge 0∥xi−xOt(t)∥(xi−xOt(t))Tui+∥xi−xOt(t)∥(xi−xOt(t))T(0,0,−gT−x˙Ot(t))+kiOthiOt(x,t)≥0
通过实时更新动态障碍的位置与速度,可实现动态障碍的实时避障。
3.4 编队保持CBF构造
编队保持的核心是维持各无人机之间的期望相对位置关系,针对编队保持约束,构造编队保持CBF,确保编队在避障过程中不溃散。
定义第iii架无人机与第jjj架无人机的编队保持CBF为:
hform,ij(x)=ϵ2−∥xi−xj−Δxijd∥2h_{\text{form}, ij}(x) = \epsilon^2 - \|x_i - x_j - \Delta x_{ij}^d\|^2hform,ij(x)=ϵ2−∥xi−xj−Δxijd∥2
其中,ϵ\epsilonϵ为编队误差允许范围,Δxijd\Delta x_{ij}^dΔxijd为期望相对位置向量。当hform,ij(x)≥0h_{\text{form}, ij}(x) \ge 0hform,ij(x)≥0时,编队误差在允许范围内,满足编队保持约束;当hform,ij(x)<0h_{\text{form}, ij}(x) < 0hform,ij(x)<0时,编队溃散,需通过控制输入调整。
对hform,ij(x)h_{\text{form}, ij}(x)hform,ij(x)求时间导数,推导其李导数:
h˙form,ij(x)=−2(xi−xj−Δxijd)T(x˙i−x˙j)\dot{h}{\text{form}, ij}(x) = -2(x_i - x_j - \Delta x{ij}^d)^T (\dot{x}_i - \dot{x}_j)h˙form,ij(x)=−2(xi−xj−Δxijd)T(x˙i−x˙j)
代入无人机动力学模型,结合CBF安全条件,选取类K函数αform,ij(s)=kform,ijs\alpha_{\text{form}, ij}(s) = k_{\text{form}, ij}sαform,ij(s)=kform,ijs(kform,ij>0k_{\text{form}, ij} > 0kform,ij>0),则编队保持安全约束为:
−2(xi−xj−Δxijd)T(ui−uj)+kform,ijhform,ij(x)≥0-2(x_i - x_j - \Delta x_{ij}^d)^T (u_i - u_j) + k_{\text{form}, ij} h_{\text{form}, ij}(x) \ge 0−2(xi−xj−Δxijd)T(ui−uj)+kform,ijhform,ij(x)≥0
通过调节增益系数kform,ijk_{\text{form}, ij}kform,ij,可平衡编队保持精度与避障机动性。
3.5 输入饱和CBF构造
无人机的执行器存在物理限制,控制输入无法超出一定范围,针对执行器饱和约束,构造输入饱和CBF,确保控制输入的合理性。
定义第iii架无人机的输入饱和CBF为两个函数,分别对应控制输入的下限与上限:
hu,min,i(ui)=ui−uminh_{u, \text{min}, i}(u_i) = u_i - u_{\text{min}}hu,min,i(ui)=ui−umin
hu,max,i(ui)=umax−uih_{u, \text{max}, i}(u_i) = u_{\text{max}} - u_ihu,max,i(ui)=umax−ui
当hu,min,i(ui)≥0h_{u, \text{min}, i}(u_i) \ge 0hu,min,i(ui)≥0且hu,max,i(ui)≥0h_{u, \text{max}, i}(u_i) \ge 0hu,max,i(ui)≥0时,控制输入满足饱和约束。
对输入饱和CBF求时间导数,由于控制输入uiu_iui的导数为u˙i\dot{u}iu˙i,结合CBF安全条件,选取类K函数αu,min,i(s)=ku,min,is\alpha{u, \text{min}, i}(s) = k_{u, \text{min}, i}sαu,min,i(s)=ku,min,is、αu,max,i(s)=ku,max,is\alpha_{u, \text{max}, i}(s) = k_{u, \text{max}, i}sαu,max,i(s)=ku,max,is(ku,min,i,ku,max,i>0k_{u, \text{min}, i}, k_{u, \text{max}, i} > 0ku,min,i,ku,max,i>0),则输入饱和安全约束为:
u˙i+ku,min,ihu,min,i(ui)≥0\dot{u}i + k{u, \text{min}, i} h_{u, \text{min}, i}(u_i) \ge 0u˙i+ku,min,ihu,min,i(ui)≥0
−u˙i+ku,max,ihu,max,i(ui)≥0-\dot{u}i + k{u, \text{max}, i} h_{u, \text{max}, i}(u_i) \ge 0−u˙i+ku,max,ihu,max,i(ui)≥0
为简化计算,可忽略u˙i\dot{u}iu˙i的影响(当控制输入变化率较小时),将约束简化为ui≥umin−αu,min,i(hu,min,i(ui))u˙iu_i \ge u{\text{min}} - \frac{\alpha_{u, \text{min}, i}(h_{u, \text{min}, i}(u_i))}{\dot{u}_i}ui≥umin−u˙iαu,min,i(hu,min,i(ui)),实际应用中可通过调节增益系数平衡约束严格性与计算复杂度。
3.6 多约束CBF融合
多无人机编队避障需同时满足机间避碰、环境避障、编队保持与输入饱和约束,因此需将各类CBF对应的安全约束进行融合,形成统一的约束集合。
对于第iii架无人机,其融合后的安全约束为:
{2(xi−xj)Tui−2(xi−xj)Tuj+kijhij(x)≥0,∀j∈Ni(xi−xO)T∥xi−xO∥ui+(xi−xO)T∥xi−xO∥0,0,−gT+kiOhiO(x)≥0,∀O∈Ostatic(xi−xOt(t))T∥xi−xOt(t)∥ui+(xi−xOt(t))T∥xi−xOt(t)∥(0,0,−gT−x˙Ot(t))+kiOthiOt(x,t)≥0,∀Ot∈Odynamic−2(xi−xj−Δxijd)T(ui−uj)+kform,ijhform,ij(x)≥0,∀j∈Niui≥umin,ui≤umax\begin{cases} 2(x_i - x_j)^T u_i - 2(x_i - x_j)^T u_j + k_{ij} h_{ij}(x) \ge 0, & \forall j \in \mathcal{N}i \\ \frac{(x_i - x_O)^T}{\|x_i - x_O\|} u_i + \frac{(x_i - x_O)^T}{\|x_i - x_O\|} 0, 0, -g^T + k{iO} h_{iO}(x) \ge 0, & \forall O \in \mathcal{O}{\text{static}} \\ \frac{(x_i - x{O_t}(t))^T}{\|x_i - x_{O_t}(t)\|} u_i + \frac{(x_i - x_{O_t}(t))^T}{\|x_i - x_{O_t}(t)\|} (0, 0, -g^T - \dot{x}{O_t}(t)) + k{iO_t} h_{iO_t}(x, t) \ge 0, & \forall O_t \in \mathcal{O}{\text{dynamic}} \\ -2(x_i - x_j - \Delta x{ij}^d)^T (u_i - u_j) + k_{\text{form}, ij} h_{\text{form}, ij}(x) \ge 0, & \forall j \in \mathcal{N}i \\ u_i \ge u{\text{min}}, \quad u_i \le u_{\text{max}} \end{cases}⎩ ⎨ ⎧2(xi−xj)Tui−2(xi−xj)Tuj+kijhij(x)≥0,∥xi−xO∥(xi−xO)Tui+∥xi−xO∥(xi−xO)T0,0,−gT+kiOhiO(x)≥0,∥xi−xOt(t)∥(xi−xOt(t))Tui+∥xi−xOt(t)∥(xi−xOt(t))T(0,0,−gT−x˙Ot(t))+kiOthiOt(x,t)≥0,−2(xi−xj−Δxijd)T(ui−uj)+kform,ijhform,ij(x)≥0,ui≥umin,ui≤umax∀j∈Ni∀O∈Ostatic∀Ot∈Odynamic∀j∈Ni
其中,Ostatic\mathcal{O}{\text{static}}Ostatic为静态障碍集合,Odynamic\mathcal{O}{\text{dynamic}}Odynamic为动态障碍集合。通过将上述约束转化为线性不等式约束Aiui≥biA_i u_i \ge b_iAiui≥bi,为后续QP优化问题的构建奠定基础。
3.7 本章小结
本章针对多无人机编队的四类核心安全约束,分别构造了机间避碰CBF、环境避碰CBF(静态+动态)、编队保持CBF与输入饱和CBF,推导了各类CBF的安全约束条件,并实现了多约束的融合,形成统一的线性约束集合。所构造的CBF能够严格保障各类安全约束的满足,且具备计算高效、约束灵活的优势,为后续分布式CBF-QP控制框架的设计提供了核心支撑。
4 分布式CBF-QP编队避障控制框架设计
4.1 控制框架总体设计
基于CBF的多无人机编队避障控制框架的核心思想是:将编队标称控制与CBF安全约束相结合,通过二次规划求解满足所有安全约束的最优控制输入,实现"最小干预"的安全协同控制。框架采用分布式架构,每个无人机仅需获取自身与邻居无人机的状态信息,通过局部QP求解控制输入,无需中心节点干预,具备良好的扩展性与容错性。
控制框架分为三个层次:
-
标称控制层:设计编队保持与轨迹跟踪的标称控制律,生成无安全约束时的理想控制输入,确保编队的基本稳定性与轨迹跟踪性能。
-
安全约束层:将第3章构造的多约束CBF转化为线性不等式约束,形成安全约束集合,确保控制输入满足所有安全要求。
-
优化求解层:构建二次规划问题,以"最小化控制输入与标称控制的偏差"为目标,在安全约束集合下求解最优控制输入,实现安全与性能的平衡。
控制框架的整体流程为:无人机通过传感器获取自身状态与邻居状态、环境障碍信息;标称控制层生成标称控制输入;安全约束层更新CBF约束并转化为线性约束;优化求解层求解QP问题,得到最优控制输入;将控制输入作用于无人机,实现编队避障与保持;重复上述流程,实现闭环控制。
4.2 标称控制律设计
标称控制律的目标是实现多无人机编队的一致性跟踪,即所有无人机跟踪期望编队轨迹,维持期望相对位置关系。本文基于分布式一致性控制理论,设计编队保持与轨迹跟踪的标称控制律。
定义第iii架无人机的轨迹跟踪误差为ei,pos=xi−xide_{i, \text{pos}} = x_i - x_i^dei,pos=xi−xid,其中xidx_i^dxid为第iii架无人机的期望轨迹;定义编队一致性误差为ei,form=∑j=1Naij(xi−xj−Δxijd)e_{i, \text{form}} = \sum_{j=1}^N a_{ij}(x_i - x_j - \Delta x_{ij}^d)ei,form=∑j=1Naij(xi−xj−Δxijd),其中aija_{ij}aij为邻接矩阵元素。
设计标称控制律为:
uinom=−k1ei,pos−k2ei,form+x¨id−f(xi)u_i^{\text{nom}} = -k_1 e_{i, \text{pos}} - k_2 e_{i, \text{form}} + \ddot{x}_i^d - f(x_i)uinom=−k1ei,pos−k2ei,form+x¨id−f(xi)
其中,k1>0k_1 > 0k1>0、k2>0k_2 > 0k2>0为控制增益,x¨id\ddot{x}_i^dx¨id为期望轨迹的加速度。该标称控制律通过比例控制减小轨迹跟踪误差与编队一致性误差,同时补偿系统标称动力学项f(xi)f(x_i)f(xi),确保无安全约束时,编队能够稳定跟踪期望轨迹,维持期望几何形态。
4.3 分布式CBF-QP优化问题构建
结合标称控制律与多约束CBF,构建第iii架无人机的局部二次规划问题,目标是最小化控制输入与标称控制的偏差,确保控制输入满足所有安全约束。
4.3.1 目标函数设计
目标函数设计为控制输入与标称控制的二次偏差,即:
minui12∥ui−uinom∥2\min_{u_i} \quad \frac{1}{2} \|u_i - u_i^{\text{nom}}\|^2minui21∥ui−uinom∥2
该目标函数的物理意义是:在满足安全约束的前提下,尽可能保留标称控制的意图,最小化对编队控制的干预,确保编队的机动性与轨迹跟踪性能。
4.3.2 约束条件转化
将第3章融合后的多约束CBF安全条件,转化为线性不等式约束Aiui≥biA_i u_i \ge b_iAiui≥bi,其中Ai∈RM×3A_i \in \mathbb{R}^{M \times 3}Ai∈RM×3(MMM为约束数量),bi∈RMb_i \in \mathbb{R}^Mbi∈RM,具体转化过程如下:
-
机间避碰约束:将2(xi−xj)Tui−2(xi−xj)Tuj+kijhij(x)≥02(x_i - x_j)^T u_i - 2(x_i - x_j)^T u_j + k_{ij} h_{ij}(x) \ge 02(xi−xj)Tui−2(xi−xj)Tuj+kijhij(x)≥0整理为2(xi−xj)Tui≥2(xi−xj)Tuj−kijhij(x)2(x_i - x_j)\^T u_i \ge 2(x_i - x_j)^T u_j - k_{ij} h_{ij}(x)2(xi−xj)Tui≥2(xi−xj)Tuj−kijhij(x),对应AiA_iAi的一行的为2(xi−xj)T2(x_i - x_j)^T2(xi−xj)T,bib_ibi的对应元素为2(xi−xj)Tuj−kijhij(x)2(x_i - x_j)^T u_j - k_{ij} h_{ij}(x)2(xi−xj)Tuj−kijhij(x)。
-
环境避障约束:将静态、动态障碍避障约束整理为(xi−xO)T∥xi−xO∥ui≥−(xi−xO)T∥xi−xO∥0,0,−gT−kiOhiO(x) \\frac{(x_i - x_O)\^T}{\\\|x_i - x_O\\\|} u_i \ge -\frac{(x_i - x_O)^T}{\|x_i - x_O\|} 0, 0, -g^T - k_{iO} h_{iO}(x)∥xi−xO∥(xi−xO)Tui≥−∥xi−xO∥(xi−xO)T0,0,−gT−kiOhiO(x),对应AiA_iAi与bib_ibi的相应行。
-
编队保持约束:将−2(xi−xj−Δxijd)T(ui−uj)+kform,ijhform,ij(x)≥0-2(x_i - x_j - \Delta x_{ij}^d)^T (u_i - u_j) + k_{\text{form}, ij} h_{\text{form}, ij}(x) \ge 0−2(xi−xj−Δxijd)T(ui−uj)+kform,ijhform,ij(x)≥0整理为−2(xi−xj−Δxijd)Tui≥−2(xi−xj−Δxijd)Tuj−kform,ijhform,ij(x) -2(x_i - x_j - \\Delta x_{ij}\^d)\^T u_i \ge -2(x_i - x_j - \Delta x_{ij}^d)^T u_j - k_{\text{form}, ij} h_{\text{form}, ij}(x)−2(xi−xj−Δxijd)Tui≥−2(xi−xj−Δxijd)Tuj−kform,ijhform,ij(x),对应AiA_iAi与bib_ibi的相应行。
-
输入饱和约束:直接转化为I3×3ui≥uminI_{3\times3} u_i \ge u_{\text{min}}I3×3ui≥umin与−I3×3ui≥−umax-I_{3\times3} u_i \ge -u_{\text{max}}−I3×3ui≥−umax,对应AiA_iAi与bib_ibi的相应行。
4.3.3 完整QP问题
第iii架无人机的局部QP问题为:
minui12∥ui−uinom∥2s.t.Aiui≥bi\begin{aligned} \min_{u_i} &\quad \frac{1}{2} \|u_i - u_i^{\text{nom}}\|^2 \\ \text{s.t.} &\quad A_i u_i \ge b_i \end{aligned}uimins.t.21∥ui−uinom∥2Aiui≥bi
该QP问题为凸二次规划问题,具有唯一最优解,可通过快速求解算法(如内点法、有效集法)实时求解,求解时间满足多无人机编队避障的实时性需求(毫秒级)。
4.4 约束可行性增强策略
在分布式架构中,每个无人机仅能获取邻居无人机的状态信息,无法获取邻居无人机的控制输入,可能导致约束条件不可行(如邻居无人机的控制输入使机间距离接近安全边界,而本地无人机无法及时调整),影响编队避障的成功率。为解决该问题,本文提出一种约束可行性增强策略,引入符号一致性约束与历史状态估计,提升约束可行性。
4.4.1 符号一致性约束设计
针对分布式场景下邻居控制输入不可知的问题,引入符号一致性约束,确保本地无人机与邻居无人机的控制输入调整方向一致,避免因控制方向冲突导致的约束不可行。定义第i架无人机与邻居无人机j的控制输入符号一致性指标为:
σij=sign((ui−uinom)T(uj−ujnom))\sigma_{ij} = \text{sign}((u_i - u_i^{\text{nom}})^T (u_j - u_j^{\text{nom}}))σij=sign((ui−uinom)T(uj−ujnom))
其中,sign(⋅)\text{sign}(\cdot)sign(⋅)为符号函数,当输入向量同向时σij=1\sigma_{ij}=1σij=1,反向时σij=−1\sigma_{ij}=-1σij=−1。符号一致性约束要求,对于所有邻居无人机j∈Nij \in \mathcal{N}ij∈Ni,需满足σij≥0\sigma{ij} \ge 0σij≥0,即本地无人机与邻居无人机的控制输入调整方向保持一致。
将符号一致性约束转化为线性不等式约束,融入QP优化问题中。由于邻居无人机的标称控制输入ujnomu_j^{\text{nom}}ujnom可通过通信获取,本地无人机可通过估计邻居无人机的控制输入调整方向,构造符号一致性约束:
(ui−uinom)T(uj−ujnom)≥−δ(u_i - u_i^{\text{nom}})^T (u_j - u_j^{\text{nom}}) \ge -\delta(ui−uinom)T(uj−ujnom)≥−δ
其中,δ>0\delta > 0δ>0为松弛系数,用于平衡约束严格性与可行性,当δ\deltaδ取值较小时,约束更严格,一致性更好;当δ\deltaδ取值较大时,约束更宽松,可行性更强。通过调节δ\deltaδ,可适配不同的飞行场景,确保约束可行性的同时,维持编队协同性。
4.4.2 邻居控制输入历史状态估计
为进一步提升约束可行性,基于邻居无人机的历史状态信息,设计控制输入估计器,预测邻居无人机的控制输入,减少因控制输入未知导致的约束冲突。采用一阶指数平滑法,结合邻居无人机的历史位置、速度状态,估计其控制输入:
u^j(k)=λv˙j(k)+(1−λ)u^j(k−1)\hat{u}_j(k) = \lambda \dot{v}_j(k) + (1 - \lambda) \hat{u}_j(k-1)u^j(k)=λv˙j(k)+(1−λ)u^j(k−1)
其中,u^j(k)\hat{u}_j(k)u^j(k)为第k时刻邻居无人机j的控制输入估计值,v˙j(k)\dot{v}_j(k)v˙j(k)为第k时刻邻居无人机j的速度变化率(由位置状态差分得到),λ∈(0,1)\lambda \in (0,1)λ∈(0,1)为平滑系数,u^j(k−1)\hat{u}_j(k-1)u^j(k−1)为第k-1时刻的控制输入估计值。
该估计器结构简单、计算量小,能够实时跟踪邻居无人机的控制输入变化趋势,且对测量噪声具有一定的抑制作用。将估计得到的u^j(k)\hat{u}j(k)u^j(k)替代QP约束中的未知uju_juj,可有效减少约束不可行的情况,提升编队避障的稳定性。同时,引入估计误差补偿项ϵu^\epsilon{\hat{u}}ϵu^,对估计误差进行修正,确保约束的严谨性:
2(xi−xj)Tui−2(xi−xj)Tu^j+kijhij(x)−ϵu^≥02(x_i - x_j)^T u_i - 2(x_i - x_j)^T \hat{u}j + k{ij} h_{ij}(x) - \epsilon_{\hat{u}} \ge 02(xi−xj)Tui−2(xi−xj)Tu^j+kijhij(x)−ϵu^≥0
其中,ϵu^>0\epsilon_{\hat{u}} > 0ϵu^>0为估计误差补偿系数,根据实际测量精度与估计误差大小进行调节。
4.4.3 改进QP问题构建
将符号一致性约束与邻居控制输入估计融入原QP问题,得到改进后的分布式CBF-QP优化问题:
minui12∥ui−uinom∥2+γ∑j∈Ni∥ui−ujnom∥2s.t.Aiui≥bi−ϵu^1(ui−uinom)T(uj−ujnom)≥−δ,∀j∈Niui≥umin,ui≤umax\begin{aligned} \min_{u_i} &\quad \frac{1}{2} \|u_i - u_i^{\text{nom}}\|^2 + \gamma \sum_{j \in \mathcal{N}i} \|u_i - u_j^{\text{nom}}\|^2 \\ \text{s.t.} &\quad A_i u_i \ge b_i - \epsilon{\hat{u}} \mathbf{1} \\ &\quad (u_i - u_i^{\text{nom}})^T (u_j - u_j^{\text{nom}}) \ge -\delta, \quad \forall j \in \mathcal{N}i \\ &\quad u_i \ge u{\text{min}}, \quad u_i \le u_{\text{max}} \end{aligned}uimins.t.21∥ui−uinom∥2+γj∈Ni∑∥ui−ujnom∥2Aiui≥bi−ϵu^1(ui−uinom)T(uj−ujnom)≥−δ,∀j∈Niui≥umin,ui≤umax
其中,γ>0\gamma > 0γ>0为协同权重系数,用于增强本地无人机与邻居无人机的控制协同性;1\mathbf{1}1为全1向量,用于补偿估计误差对约束的影响。改进后的QP问题不仅保留了原有的安全约束与最小干预目标,还通过符号一致性约束与控制输入估计,有效提升了约束可行性,解决了分布式场景下邻居控制不可知导致的避障失败问题。
4.5 控制框架稳定性分析
为确保所设计的分布式CBF-QP控制框架能够实现多无人机编队的稳定避障与编队保持,本节对控制框架的稳定性进行严格证明,基于李雅普诺夫稳定性理论,推导系统的稳定性条件。
定义多无人机编队系统的李雅普诺夫函数为:
V=12∑i=1N(∥ei,pos∥2+∥ei,form∥2+∑j∈Nihij(x)+∑O∈OstatichiO(x))V = \frac{1}{2} \sum_{i=1}^N \left( \|e_{i,\text{pos}}\|^2 + \|e_{i,\text{form}}\|^2 + \sum_{j \in \mathcal{N}i} h{ij}(x) + \sum_{O \in \mathcal{O}{\text{static}}} h{iO}(x) \right)V=21∑i=1N(∥ei,pos∥2+∥ei,form∥2+∑j∈Nihij(x)+∑O∈OstatichiO(x))
其中,ei,pose_{i,\text{pos}}ei,pos为轨迹跟踪误差,ei,forme_{i,\text{form}}ei,form为编队一致性误差,各项均为非负项,因此V≥0V \ge 0V≥0,且当且仅当ei,pos=0e_{i,\text{pos}} = 0ei,pos=0、ei,form=0e_{i,\text{form}} = 0ei,form=0、hij(x)=0h_{ij}(x) = 0hij(x)=0、hiO(x)=0h_{iO}(x) = 0hiO(x)=0时,V=0V = 0V=0,满足李雅普诺夫函数的基本条件。
对李雅普诺夫函数VVV求时间导数,结合无人机动力学模型、CBF安全条件与改进后的QP优化问题,可推导得到:
V˙=∑i=1N(ei,posTe˙i,pos+ei,formTe˙i,form+∑j∈Nih˙ij(x)+∑O∈Ostatich˙iO(x))\dot{V} = \sum_{i=1}^N \left( e_{i,\text{pos}}^T \dot{e}{i,\text{pos}} + e{i,\text{form}}^T \dot{e}{i,\text{form}} + \sum{j \in \mathcal{N}i} \dot{h}{ij}(x) + \sum_{O \in \mathcal{O}{\text{static}}} \dot{h}{iO}(x) \right)V˙=∑i=1N(ei,posTe˙i,pos+ei,formTe˙i,form+∑j∈Nih˙ij(x)+∑O∈Ostatich˙iO(x))
代入标称控制律与CBF安全条件h˙(x)+α(h(x))≥0\dot{h}(x) + \alpha(h(x)) \ge 0h˙(x)+α(h(x))≥0,结合改进QP的约束条件,可证明V˙≤−kV\dot{V} \le -k VV˙≤−kV(其中k>0k > 0k>0为衰减系数),即李雅普诺夫函数VVV指数收敛至零。
综上,所设计的分布式CBF-QP控制框架能够保证多无人机编队系统的指数稳定,确保在满足所有安全约束的前提下,编队能够稳定跟踪期望轨迹,维持期望几何形态,实现安全避障。
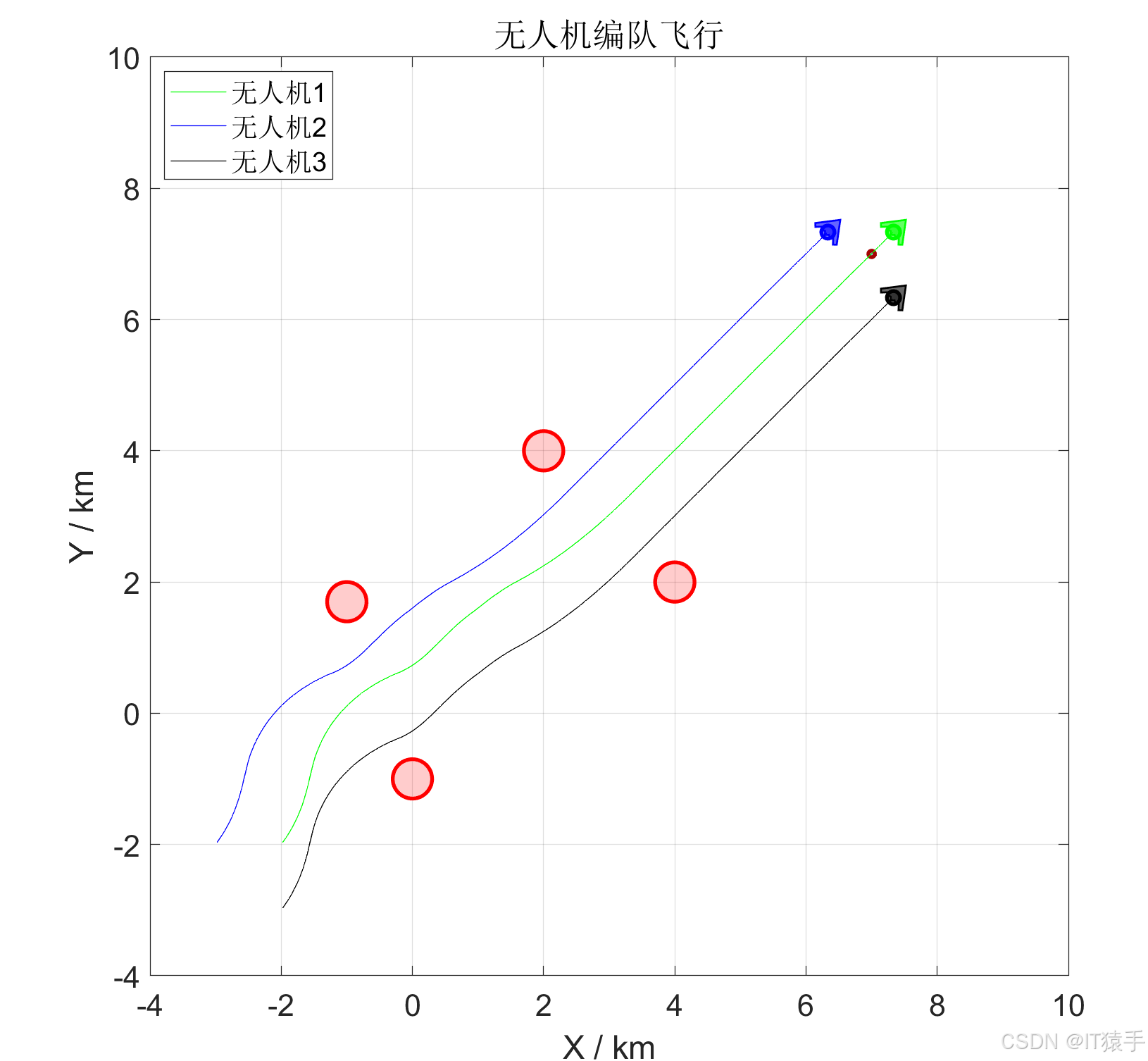
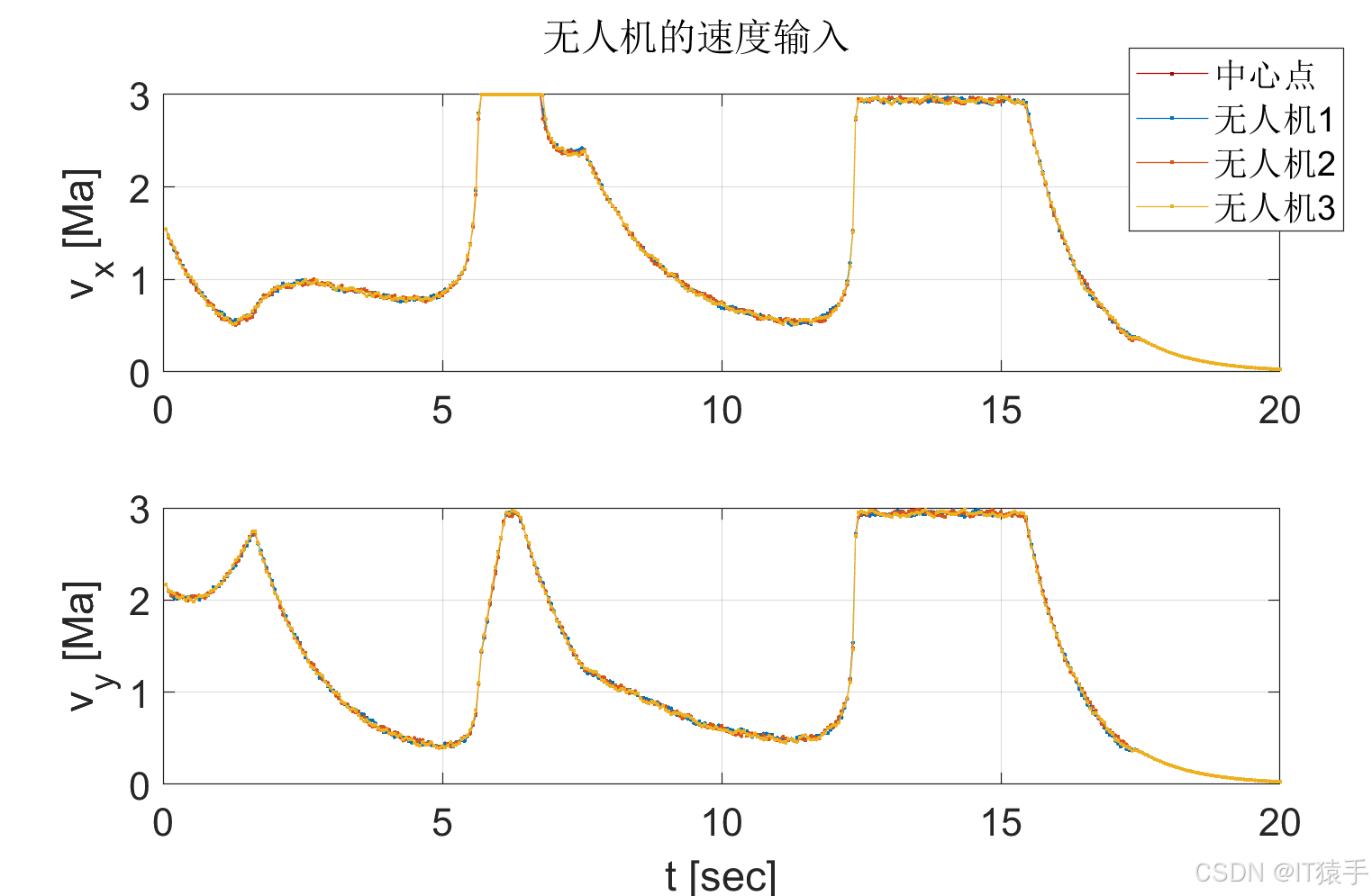
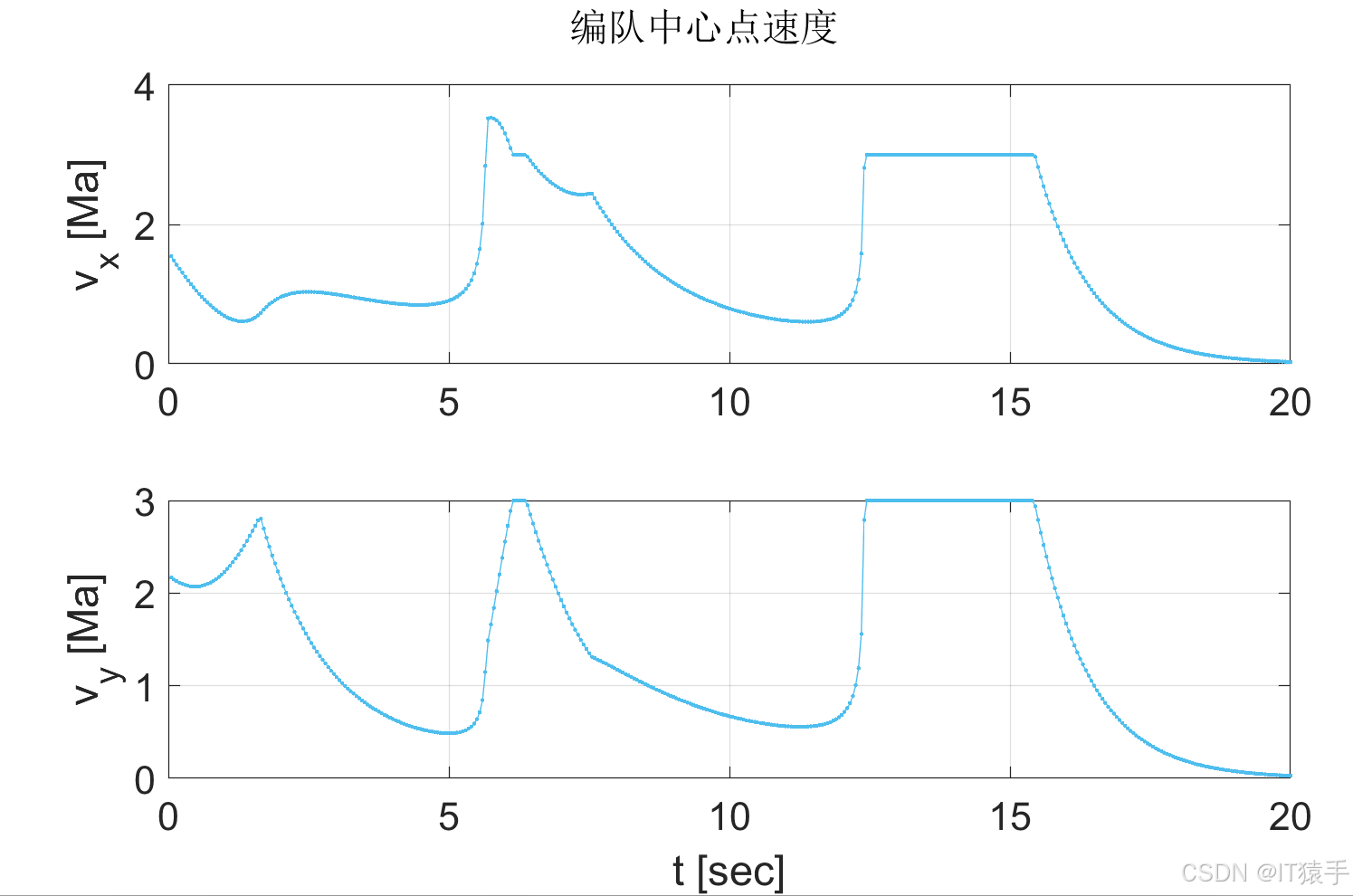
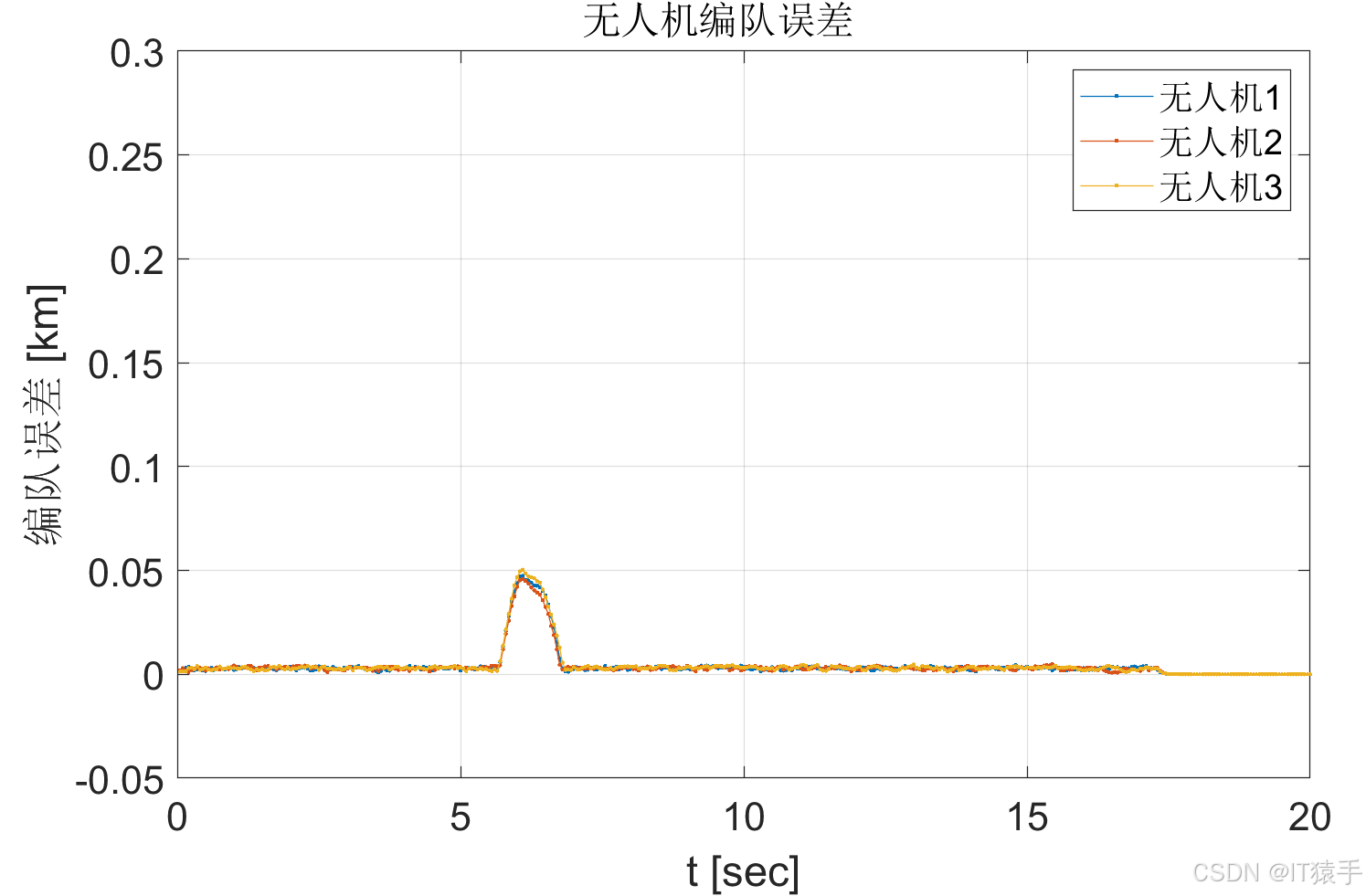
5 仿真实验与性能验证
5.1 仿真实验平台搭建
为验证所提基于CBF的多无人机编队避障路径规划方法的有效性与优越性,搭建多无人机编队避障仿真平台,基于MATLAB实现。