文章目录
例程简介
基于 快速随机树(Rapidly-exploring Random Tree, RRT) 的二维路径规划算法,模拟无人车或移动机器人在存在障碍物环境中的路径搜索与避障过程。障碍物坐标、起终点、最大迭代次数等均可自定义。带有路径可视化、收敛过程分析以及规划结果统计等功能。
完整代码,原创,可联系获取讲解、定制
运行结果
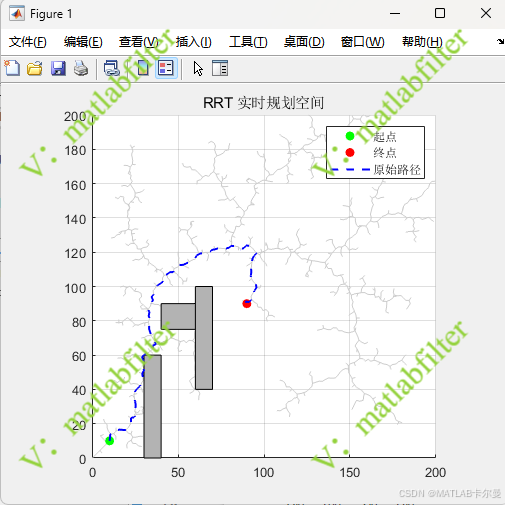
路径规划结果:
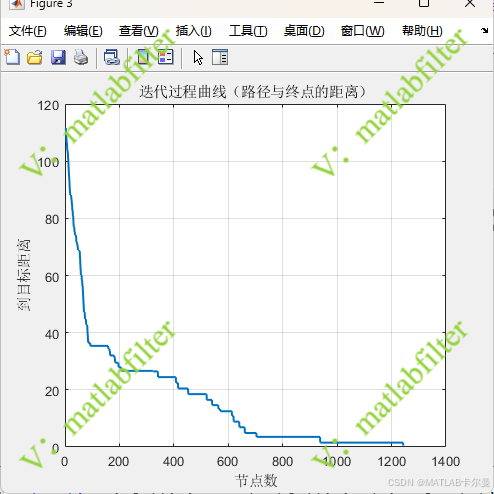
迭代过程曲线:
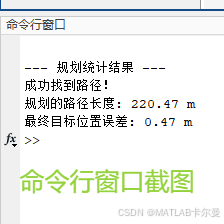
命令行窗口的截图:
MATLAB源代码
程序初始化部分的截图:
部分代码如下:
matlab
%% RRT路径规划,用于二维平面上的无人车路径规划与避障,含性能分析与可视化
% 作者:matlabfilter
% 2026-03-10/Ver1
clear; clc; close all;
rng(0);
% 参数设置
mapLimit = [0 200 0 200]; %地图大小,也是路径搜索的范围
startPos = [10, 10]; %起点坐标
goalPos = [90, 90]; %终点(目标)的坐标
stepSize = 2; %步长
goalThreshold = 1;% 到达目标的阈值
maxIter = 10000;% 最大迭代次数
goalProb = 0.1;% 采样点偏向目标的概率
obstacles = [
30, 0, 10, 60;
60, 40, 10, 60;
40, 75, 20, 15]; %此处可修改障碍物设置
% 数据记录变量
tree.pos = startPos; tree.parent = 0;
distToGoalIter = []; % 每步到目标的距离
nodeCountIter = []; % 节点增长情况
% 【图形布局】完整代码:https://download.csdn.net/download/callmeup/92733459
另有三维的文章可供参考:https://blog.csdn.net/callmeup/article/details/158923075?spm=1011.2415.3001.5331
如需一对一讲解、代码定制等,请点击下方卡片联系作者