STM32------FreeRTOS - 任务创建和删除*
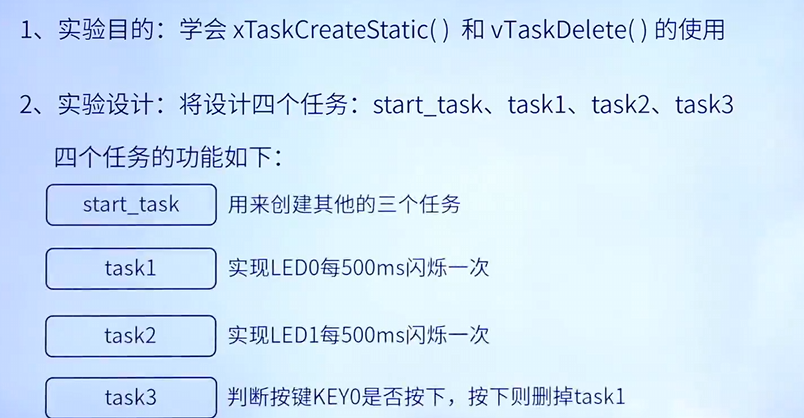
三、任务创建和删除(静态方法)
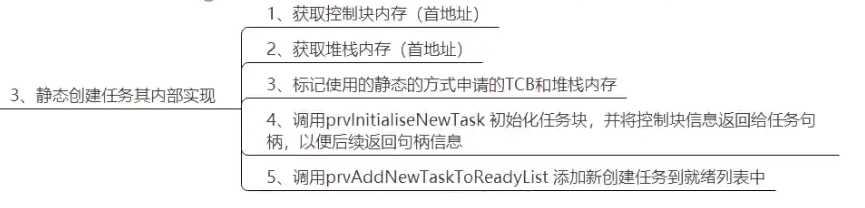
静态任务创建流程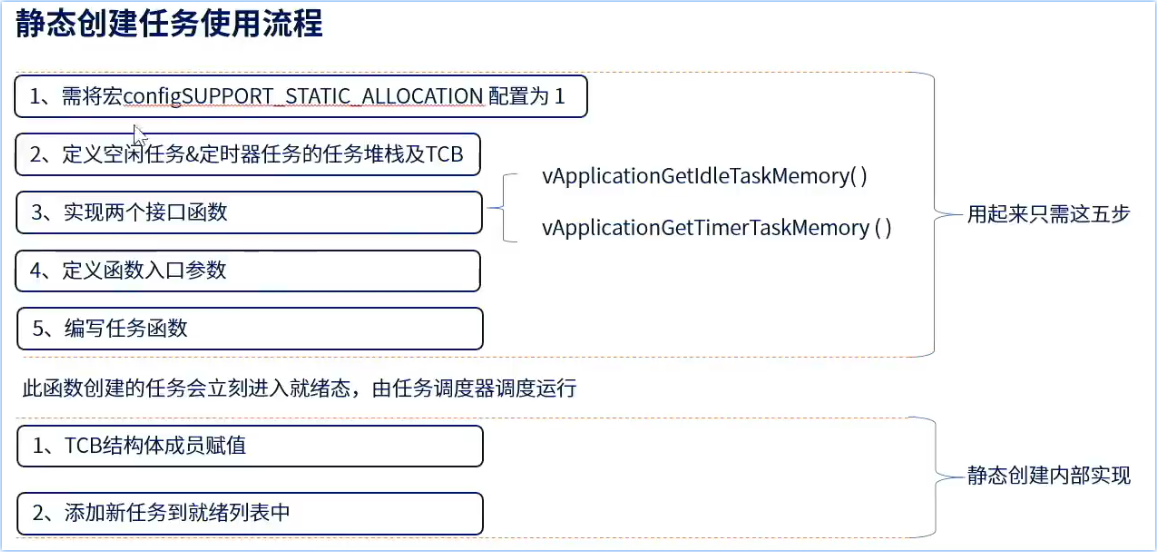
删除任务、prvAddNewTaskToReadyList、prvInitialiseNewTask 参考:
STM32------FreeRTOS - 任务创建和删除 ~ 动态方法-CSDN博客![]() https://blog.csdn.net/PinnsiR/article/details/159357638?sharetype=blogdetail&sharerId=159357638&sharerefer=PC&sharesource=PinnsiR&spm=1011.2480.3001.8118xTaskCreateStatic 与xTaskCreate 的差别主要在内存分配上,以及会返回一个 TCB任务控制块句柄,其余逻辑看源码即可。
https://blog.csdn.net/PinnsiR/article/details/159357638?sharetype=blogdetail&sharerId=159357638&sharerefer=PC&sharesource=PinnsiR&spm=1011.2480.3001.8118xTaskCreateStatic 与xTaskCreate 的差别主要在内存分配上,以及会返回一个 TCB任务控制块句柄,其余逻辑看源码即可。

静态配置运行分析
FreeRTOSConfig.h
cpp
FreeRTOSConfig.h
#define configSUPPORT_STATIC_ALLOCATION 1 /* 1: 支持静态申请内存, 默认: 0 */
#define configMINIMAL_STACK_SIZE 128 /* 定义空闲任务的栈空间大小, 单位: Word, 无默认需定义 */
#define configTIMER_TASK_STACK_DEPTH ( configMINIMAL_STACK_SIZE * 2) /* 定义软件定时器任务的栈空间大小, 无默认configUSE_TIMERS为1时需定义 */开启静态申请内存宏后,配置所有任务创建的函数会被宏编译调用。
那么,任务开启调度器(vTaskStartScheduler)里 自动 创建的 空闲任务(IdleTask)\定时器任务(TimerTask),需要
-
手动分配空闲任务内存空间(任务堆栈内存和大小)。
-
vApplicationGetIdleTaskMemory函数体实现
-
vApplicationGetTimerTaskMemory函数体实现
函数启动调简易图:
main() ->
vTaskStartScheduler -》
-> vApplicationGetIdleTaskMemory
-> xTaskCreateStatic( prvIdleTask,
-> xTimerCreateTimerTask
-> vApplicationGetTimerTaskMemory
-> xTaskCreateStatic( prvTimerTask
vTaskStartScheduler()
cpp
void vTaskStartScheduler( void )
{
BaseType_t xReturn;
/* Add the idle task at the lowest priority. */
#if ( configSUPPORT_STATIC_ALLOCATION == 1 )
{
StaticTask_t * pxIdleTaskTCBBuffer = NULL;
StackType_t * pxIdleTaskStackBuffer = NULL;
uint32_t ulIdleTaskStackSize;
/* The Idle task is created using user provided RAM - obtain the
* address of the RAM then create the idle task. */
vApplicationGetIdleTaskMemory( &pxIdleTaskTCBBuffer, &pxIdleTaskStackBuffer, &ulIdleTaskStackSize );
xIdleTaskHandle = xTaskCreateStatic( prvIdleTask,
configIDLE_TASK_NAME,
ulIdleTaskStackSize,
( void * ) NULL, /*lint !e961. The cast is not redundant for all compilers. */
portPRIVILEGE_BIT, /* In effect ( tskIDLE_PRIORITY | portPRIVILEGE_BIT ), but tskIDLE_PRIORITY is zero. */
pxIdleTaskStackBuffer,
pxIdleTaskTCBBuffer ); /*lint !e961 MISRA exception, justified as it is not a redundant explicit cast to all supported compilers. */
...... ......
#if ( configUSE_TIMERS == 1 )
{
if( xReturn == pdPASS )
{
xReturn = xTimerCreateTimerTask();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* configUSE_TIMERS */
#endif
}xTimerCreateTimerTask()
cpp
BaseType_t xTimerCreateTimerTask( void )
{
BaseType_t xReturn = pdFAIL;
/* This function is called when the scheduler is started if
* configUSE_TIMERS is set to 1. Check that the infrastructure used by the
* timer service task has been created/initialised. If timers have already
* been created then the initialisation will already have been performed. */
prvCheckForValidListAndQueue();
if( xTimerQueue != NULL )
{
#if ( configSUPPORT_STATIC_ALLOCATION == 1 )
{
StaticTask_t * pxTimerTaskTCBBuffer = NULL;
StackType_t * pxTimerTaskStackBuffer = NULL;
uint32_t ulTimerTaskStackSize;
vApplicationGetTimerTaskMemory( &pxTimerTaskTCBBuffer, &pxTimerTaskStackBuffer, &ulTimerTaskStackSize );
xTimerTaskHandle = xTaskCreateStatic( prvTimerTask,
configTIMER_SERVICE_TASK_NAME,
ulTimerTaskStackSize,
NULL,
( ( UBaseType_t ) configTIMER_TASK_PRIORITY ) | portPRIVILEGE_BIT,
pxTimerTaskStackBuffer,
pxTimerTaskTCBBuffer );
...... ......
return xReturn;
}
/*-----------------------------------------------------------*/vApplication xxx Memory()
cpp
static StackType_t IdleTaskStack[configMINIMAL_STACK_SIZE]; /* 空闲任务任务堆栈 */
static StaticTask_t IdleTaskTCB; /* 空闲任务控制块 */
static StackType_t TimerTaskStack[configTIMER_TASK_STACK_DEPTH]; /* 定时器服务任务堆栈 */
static StaticTask_t TimerTaskTCB; /* 定时器服务任务控制块 */
、/**
* @brief 获取空闲任务地任务堆栈和任务控制块内存,因为本例程使用的
静态内存,因此空闲任务的任务堆栈和任务控制块的内存就应该
有用户来提供,FreeRTOS提供了接口函数vApplicationGetIdleTaskMemory()
实现此函数即可。
* @param ppxIdleTaskTCBBuffer:任务控制块内存
ppxIdleTaskStackBuffer:任务堆栈内存
pulIdleTaskStackSize:任务堆栈大小
* @retval 无
*/
void vApplicationGetIdleTaskMemory(StaticTask_t **ppxIdleTaskTCBBuffer,
StackType_t **ppxIdleTaskStackBuffer,
uint32_t *pulIdleTaskStackSize)
{
*ppxIdleTaskTCBBuffer = &IdleTaskTCB;
*ppxIdleTaskStackBuffer = IdleTaskStack;
*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
}
/**
* @brief 获取定时器服务任务的任务堆栈和任务控制块内存
* @param ppxTimerTaskTCBBuffer:任务控制块内存
ppxTimerTaskStackBuffer:任务堆栈内存
pulTimerTaskStackSize:任务堆栈大小
* @retval 无
*/
void vApplicationGetTimerTaskMemory(StaticTask_t **ppxTimerTaskTCBBuffer,
StackType_t **ppxTimerTaskStackBuffer,
uint32_t *pulTimerTaskStackSize)
{
*ppxTimerTaskTCBBuffer = &TimerTaskTCB;
*ppxTimerTaskStackBuffer= TimerTaskStack;
*pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH;
}demo:
cpp
#include "freertos_demo.h"
#include "./BSP/LCD/lcd.h"
#include "./BSP/KEY/key.h"
/*FreeRTOS*********************************************************************************************/
#include "FreeRTOS.h"
#include "task.h"
/******************************************************************************************************/
/*FreeRTOS配置*/
static StackType_t IdleTaskStack[configMINIMAL_STACK_SIZE]; /* 空闲任务任务堆栈 */
static StaticTask_t IdleTaskTCB; /* 空闲任务控制块 */
static StackType_t TimerTaskStack[configTIMER_TASK_STACK_DEPTH]; /* 定时器服务任务堆栈 */
static StaticTask_t TimerTaskTCB; /* 定时器服务任务控制块 */
/**
* @brief 获取空闲任务地任务堆栈和任务控制块内存,因为本例程使用的
静态内存,因此空闲任务的任务堆栈和任务控制块的内存就应该
有用户来提供,FreeRTOS提供了接口函数vApplicationGetIdleTaskMemory()
实现此函数即可。
* @param ppxIdleTaskTCBBuffer:任务控制块内存
ppxIdleTaskStackBuffer:任务堆栈内存
pulIdleTaskStackSize:任务堆栈大小
* @retval 无
*/
void vApplicationGetIdleTaskMemory(StaticTask_t **ppxIdleTaskTCBBuffer,
StackType_t **ppxIdleTaskStackBuffer,
uint32_t *pulIdleTaskStackSize)
{
*ppxIdleTaskTCBBuffer = &IdleTaskTCB;
*ppxIdleTaskStackBuffer = IdleTaskStack;
*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
}
/**
* @brief 获取定时器服务任务的任务堆栈和任务控制块内存
* @param ppxTimerTaskTCBBuffer:任务控制块内存
ppxTimerTaskStackBuffer:任务堆栈内存
pulTimerTaskStackSize:任务堆栈大小
* @retval 无
*/
void vApplicationGetTimerTaskMemory(StaticTask_t **ppxTimerTaskTCBBuffer,
StackType_t **ppxTimerTaskStackBuffer,
uint32_t *pulTimerTaskStackSize)
{
*ppxTimerTaskTCBBuffer = &TimerTaskTCB;
*ppxTimerTaskStackBuffer= TimerTaskStack;
*pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH;
}
/* START_TASK 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define START_TASK_PRIO 1 /* 任务优先级 */
#define START_STK_SIZE 128 /* 任务堆栈大小 */
StackType_t StartTaskStack[START_STK_SIZE]; /* 任务堆栈 */
StaticTask_t StartTaskTCB; /* 任务控制块 */
TaskHandle_t StartTask_Handler; /* 任务句柄 */
void start_task(void *pvParameters); /* 任务函数 */
/* TASK1 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK1_PRIO 2 /* 任务优先级 */
#define TASK1_STK_SIZE 128 /* 任务堆栈大小 */
StackType_t Task1TaskStack[TASK1_STK_SIZE]; /* 任务堆栈 */
StaticTask_t Task1TaskTCB; /* 任务控制块 */
TaskHandle_t Task1Task_Handler; /* 任务句柄 */
void task1(void *pvParameters); /* 任务函数 */
/* TASK2 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK2_PRIO 3 /* 任务优先级 */
#define TASK2_STK_SIZE 128 /* 任务堆栈大小 */
StackType_t Task2TaskStack[TASK2_STK_SIZE]; /* 任务堆栈 */
StaticTask_t Task2TaskTCB; /* 任务控制块 */
TaskHandle_t Task2Task_Handler; /* 任务句柄 */
void task2(void *pvParameters); /* 任务函数 */
/* TASK3 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK3_PRIO 4 /* 任务优先级 */
#define TASK3_STK_SIZE 128 /* 任务堆栈大小 */
StackType_t Task3TaskStack[TASK3_STK_SIZE]; /* 任务堆栈 */
StaticTask_t Task3TaskTCB; /* 任务控制块 */
TaskHandle_t Task3Task_Handler; /* 任务句柄 */
void task3(void *pvParameters); /* 任务函数 */
/******************************************************************************************************/
/* LCD刷屏时使用的颜色 */
uint16_t lcd_discolor[11] = {WHITE, BLACK, BLUE, RED,
MAGENTA, GREEN, CYAN, YELLOW,
BROWN, BRRED, GRAY};
/**
* @brief FreeRTOS例程入口函数
* @param 无
* @retval 无
*/
void freertos_demo(void)
{
lcd_show_string(10, 10, 220, 32, 32, "STM32", RED);
lcd_show_string(10, 47, 220, 24, 24, "Task Create & Del", RED);
lcd_show_string(10, 76, 220, 16, 16, "ATOM@ALIENTEK", RED);
lcd_draw_rectangle(5, 110, 115, 314, BLACK);
lcd_draw_rectangle(125, 110, 234, 314, BLACK);
lcd_draw_line(5, 130, 115, 130, BLACK);
lcd_draw_line(125, 130, 234, 130, BLACK);
lcd_show_string(15, 111, 110, 16, 16, "Task1: 000", BLUE);
lcd_show_string(135, 111, 110, 16, 16, "Task2: 000", BLUE);
StartTask_Handler = xTaskCreateStatic((TaskFunction_t )start_task, /* 任务函数 */
(const char* )"start_task", /* 任务名称 */
(uint32_t )START_STK_SIZE, /* 任务堆栈大小 */
(void* )NULL, /* 传递给任务函数的参数 */
(UBaseType_t )START_TASK_PRIO, /* 任务优先级 */
(StackType_t* )StartTaskStack, /* 任务堆栈 */
(StaticTask_t* )&StartTaskTCB); /* 任务控制块 */
vTaskStartScheduler();
}
/**
* @brief start_task
* @param pvParameters : 传入参数(未用到)
* @retval 无
*/
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); /* 进入临界区 */
/* 创建任务1 */
Task1Task_Handler = xTaskCreateStatic((TaskFunction_t )task1, /* 任务函数 */
(const char* )"task1", /* 任务名称 */
(uint32_t )TASK1_STK_SIZE,/* 任务堆栈大小 */
(void* )NULL, /* 传递给任务函数的参数 */
(UBaseType_t )TASK1_PRIO, /* 任务优先级 */
(StackType_t* )Task1TaskStack,/* 任务堆栈 */
(StaticTask_t* )&Task1TaskTCB);/* 任务控制块 */
/* 创建任务2 */
Task2Task_Handler = xTaskCreateStatic((TaskFunction_t )task2, /* 任务函数 */
(const char* )"task2", /* 任务名称 */
(uint32_t )TASK2_STK_SIZE,/* 任务堆栈大小 */
(void* )NULL, /* 传递给任务函数的参数 */
(UBaseType_t )TASK2_PRIO, /* 任务优先级 */
(StackType_t* )Task2TaskStack,/* 任务堆栈 */
(StaticTask_t* )&Task2TaskTCB);/* 任务控制块 */
/* 创建任务3 */
Task3Task_Handler = xTaskCreateStatic((TaskFunction_t )task3, /* 任务函数 */
(const char* )"task3", /* 任务名称 */
(uint32_t )TASK3_STK_SIZE,/* 任务堆栈大小 */
(void* )NULL, /* 传递给任务函数的参数 */
(UBaseType_t )TASK3_PRIO, /* 任务优先级 */
(StackType_t* )Task3TaskStack,/* 任务堆栈 */
(StaticTask_t* )&Task3TaskTCB);/* 任务控制块 */
vTaskDelete(StartTask_Handler); /* 删除开始任务 */
taskEXIT_CRITICAL(); /* 退出临界区 */
}
/**
* @brief task1
* @param pvParameters : 传入参数(未用到)
* @retval 无
*/
void task1(void *pvParameters)
{
uint32_t task1_num = 0;
while (1)
{
lcd_fill(6, 131, 114, 313, lcd_discolor[++task1_num % 11]);
lcd_show_xnum(71, 111, task1_num, 3, 16, 0x80, BLUE);
vTaskDelay(500);
}
}
/**
* @brief task2
* @param pvParameters : 传入参数(未用到)
* @retval 无
*/
void task2(void *pvParameters)
{
uint32_t task2_num = 0;
while (1)
{
lcd_fill(126, 131, 233, 313, lcd_discolor[11 - (++task2_num % 11)]);
lcd_show_xnum(191, 111, task2_num, 3, 16, 0x80, BLUE);
vTaskDelay(500);
}
}
/**
* @brief task3
* @param pvParameters : 传入参数(未用到)
* @retval 无
*/
void task3(void *pvParameters)
{
uint8_t key = 0;
while (1)
{
key = key_scan(0);
switch (key)
{
case KEY0_PRES: /* 删除任务1 */
{
if (Task1Task_Handler != NULL)
{
vTaskDelete(Task1Task_Handler);
Task1Task_Handler = NULL;
}
break;
}
case KEY1_PRES: /* 删除任务2 */
{
if (Task2Task_Handler != NULL)
{
vTaskDelete(Task2Task_Handler);
Task2Task_Handler = NULL;
}
break;
}
default:
{
break;
}
}
vTaskDelay(10);
}
}"动态更方便,静态给高手极限压榨内存的"