最后更新:2026年2月
适用系统:Ubuntu 22.04 LTS(Jammy) / Ubuntu 24.04 LTS(Noble)
适用架构:x86_64 / arm64(包括树莓派)
📌 一、版本选择原则(必读)
| 你的Ubuntu版本 | 必须安装的ROS2版本 | 支持截止 | 推荐度 |
|---|---|---|---|
| 22.04 LTS | ROS2 Humble Hawksbill | 2027年5月 | ⭐⭐⭐ 稳定成熟 |
| 24.04 LTS | ROS2 Jazzy Jalisco | 2029年5月 | ⭐⭐⭐⭐ 新项目首选 |
❗ 核心原则:Ubuntu版本与ROS2版本严格绑定,22.04不能装Jazzy,24.04不能装Humble。
❗ 架构说明:x86_64(普通PC)和arm64(树莓派4B/5、NVIDIA Jetson)均支持上述版本。
🚀 方案一:一键脚本安装(5分钟极速版)
推荐人群:新手、希望零坑位、网络环境一般、需要快速验证者
工具来源:鱼香ROS(国内开源社区维护,已稳定运行5年+)
1️⃣ 第一步:确认系统版本
lsb_release -a预期输出:包含 Ubuntu 22.04.5 LTS 或 Ubuntu 24.04.2 LTS
2️⃣ 第二步:执行一键安装脚本
wget http://fishros.com/install -O fishros && . fishros3️⃣ 第三步:交互式配置(严格按顺序)
⚠️ 第一次运行脚本:
- 输入数字:5 → 选择【一键配置系统源】
- 输入数字:2 → 选择【更换系统源并清理第三方源】(推荐中科大)
- 脚本自动执行,等待完成
⚠️ 第二次运行脚本(重新执行上述命令):
wget http://fishros.com/install -O fishros && . fishros- 输入数字:1 → 选择【添加ROS/ROS2官方源】
- 脚本自动执行,等待完成
⚠️ 第三次运行脚本(再次执行):
wget http://fishros.com/install -O fishros && . fishros-
输入数字:1 → 选择【不更换源安装】(因前两步已完成换源)
-
选择镜像源:推荐输入 1(中科大)
-
选择ROS2版本:
- Ubuntu 22.04 → 输入 humble
- Ubuntu 24.04 → 输入 jazzy
-
选择安装类型:输入 desktop(桌面完整版,包含RViz、Turtlesim等)
⏳ 等待约3-8分钟(取决于网速),无报错即安装完成。
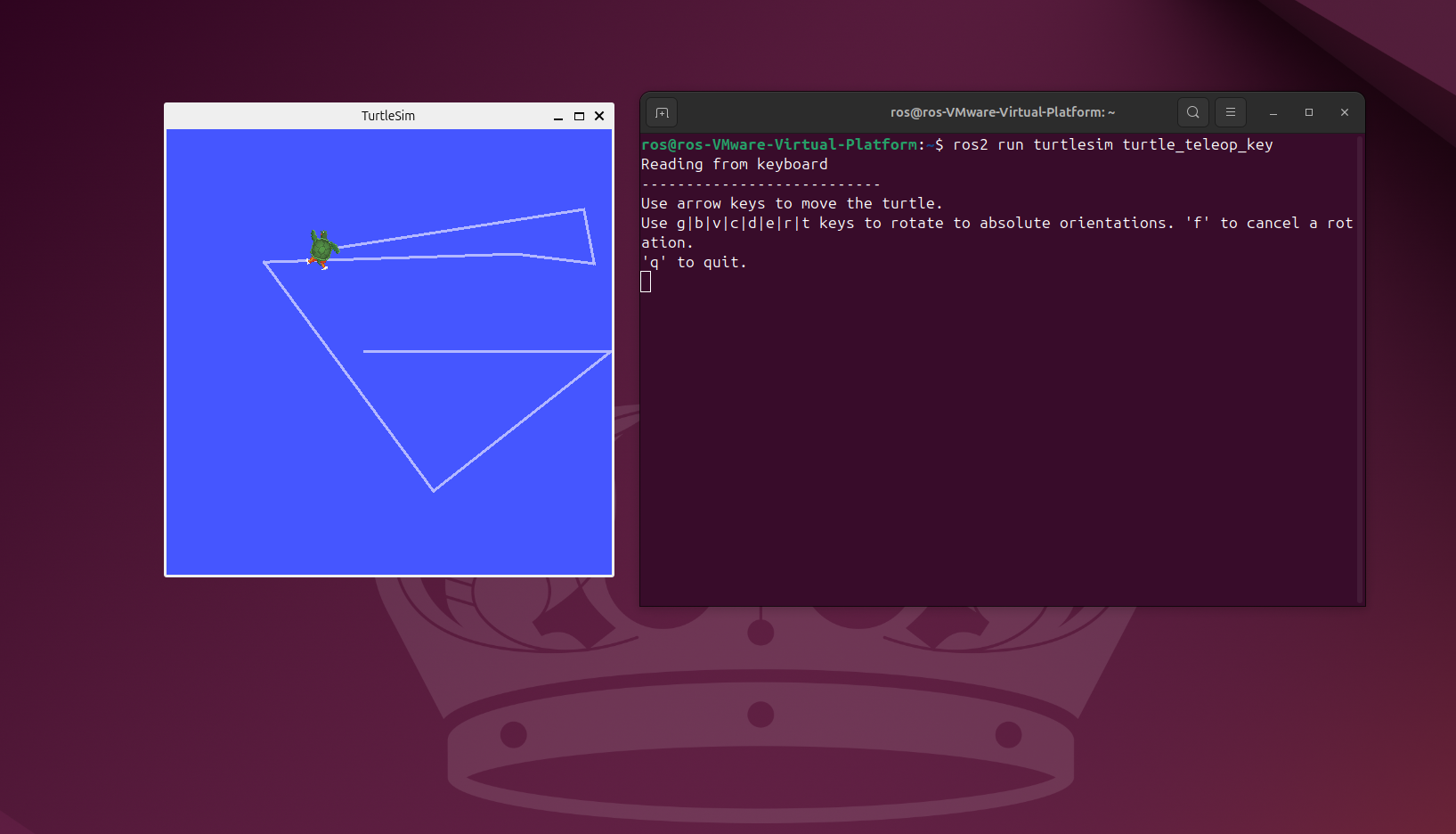
4️⃣ 第四步:验证安装(小乌龟测试)
打开终端A(Ctrl+Alt+T):
ros2 run turtlesim turtlesim_node打开终端B:
ros2 run turtlesim turtle_teleop_key预期效果:出现蓝色窗口和小乌龟,键盘↑↓←→可控制移动 → ✅ 安装成功
🔧 方案二:官方标准安装(完全可控)
推荐人群:开发者、需要纯净环境、网络稳定(海外/代理)、后期需深度定制者
第1步:设置语言环境(UTF-8)
sudo apt update
sudo apt install locales -y
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale确认输出:LANG=en_US.UTF-8 等环境变量正确
第2步:启用Ubuntu Universe仓库
sudo apt install software-properties-common -y
sudo add-apt-repository universe -y第3步:添加ROS2 GPG密钥及软件源
3.1 安装curl并下载密钥
sudo apt update
sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg3.2 添加ROS2 apt仓库(架构自动识别)
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null第4步:安装ROS2
4.1 更新软件包索引
sudo apt update
sudo apt upgrade -y4.2 根据Ubuntu版本执行对应命令
🔹 如果你的是 Ubuntu 22.04:
sudo apt install ros-humble-desktop -y可选精简版:sudo apt install ros-humble-ros-base -y(无GUI工具)
🔹 如果你的是 Ubuntu 24.04:
sudo apt install ros-jazzy-desktop -y可选精简版:sudo apt install ros-jazzy-ros-base -y(无GUI工具)
⏳ 安装大小:约1.5GB~2.5GB,耗时5-15分钟。
第5步:安装开发工具与依赖管理
5.1 安装ROS开发工具包
sudo apt install ros-dev-tools -y5.2 安装colcon构建工具(编译工作空间必备)
sudo apt install python3-colcon-common-extensions -y5.3 安装并初始化rosdep(依赖管理工具,可选但推荐)
sudo apt install python3-rosdep -y
sudo rosdep init
rosdep update⚠️ 常见报错:若sudo rosdep init提示"已存在",则跳过;若提示网络错误,可尝试sudo rm /etc/ros/rosdep/sources.list.d/20-default.list后重试。
第6步:配置环境变量(永久生效)
将ROS2环境加载脚本写入~/.bashrc,避免每次打开终端都要手动source。
🔹 Ubuntu 22.04 + Humble:
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc🔹 Ubuntu 24.04 + Jazzy:
echo "source /opt/ros/jazzy/setup.bash" >> ~/.bashrc
source ~/.bashrc验证环境:
echo $ROS_DISTRO预期输出:humble 或 jazzy
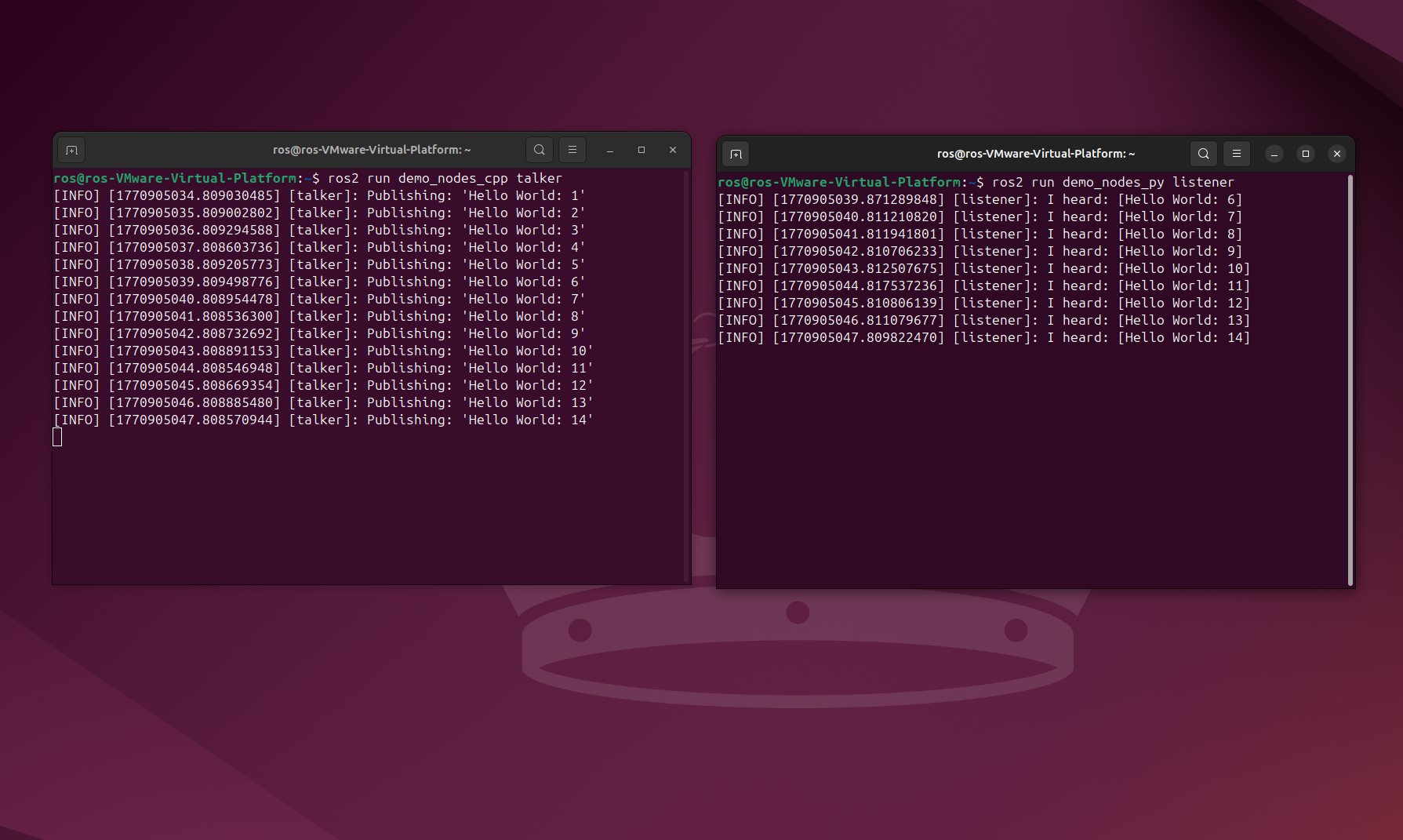
第7步:验证安装(Talker-Listener测试)
打开终端A:
ros2 run demo_nodes_cpp talker预期输出:INFO xxx talker: Publishing: 'Hello World: 1' 持续滚动
打开终端B:
ros2 run demo_nodes_py listener预期输出:INFO xxx listener: I heard: Hello World: 1 持续滚动
✅ 看到以上内容,恭喜!ROS2已完整、正确地安装在你的系统中。
🆘 三、常见问题急救包(FAQ)
| 问题现象 | 根本原因 | 解决方案 |
|---|---|---|
| E: Unable to locate package ros-humble-desktop | ROS2 apt源未添加成功 | 重做第3步,或换清华源/中科大源 |
| rosdep: command not found | 未安装python3-rosdep | sudo apt install python3-rosdep -y |
| 每次打开终端都要手动source | 未写入.bashrc | 执行第6步 |
| 安装卡在99% / 依赖冲突 | 网络波动/源不稳定 | Ctrl+C中断,重新sudo apt install |
| ros2: command not found | 环境未加载 | 先执行source /opt/ros/{humble/jazzy}/setup.bash |
| 虚拟机无法运行turtlesim | OpenGL渲染问题 | 虚拟机设置启用3D加速,或安装export LIBGL_ALWAYS_SOFTWARE=1 |
| 树莓派编译内存不足 | 源码编译时RAM不够 | 使用二进制安装(本教程均为二进制),或增加swap |
📁 四、进阶:国内镜像源加速(可选)
如果你在执行sudo apt update时速度极慢,或方案一换源失败,可手动更换apt源为国内镜像。
Ubuntu 22.04(中科大源):
sudo sed -i 's@//.*archive.ubuntu.com@//mirrors.ustc.edu.cn@g' /etc/apt/sources.list
sudo apt updateUbuntu 24.04(中科大源):
sudo sed -i 's@//.*archive.ubuntu.com@//mirrors.ustc.edu.cn@g' /etc/apt/sources.list
sudo apt updateROS2软件源换国内源(清华):
sudo sed -i 's@packages.ros.org@mirrors.tuna.tsinghua.edu.cn/ros2@g' /etc/apt/sources.list.d/ros2.list
sudo apt update📝 五、备注
本教程基于以下官方文档及社区实践编写:
- ROS2官方安装指南:https://docs.ros.org
- 鱼香ROS一键安装:http://fishros.com
- Ubuntu官方树莓派镜像:https://ubuntu.com/download/raspberry-pi