随着服务机器人逐步进入家庭场景,人机交互(HRI)的安全性成为影响机器人普及的关键因素。相较于工业环境,家庭空间布局多变、人员活动随机,对机械臂的感知、规划与控制提出了更高要求。
本文以7自由度Kinova Gen3机械臂为实验平台,结合红外传感与快速扩展随机树(RRT)算法,设计一套适用于动态家庭环境的人机交互安全方案,并通过仿真验证其在安全距离保持、避障响应与计算效率等方面的表现,为家用协作机械臂的安全设计提供参考。
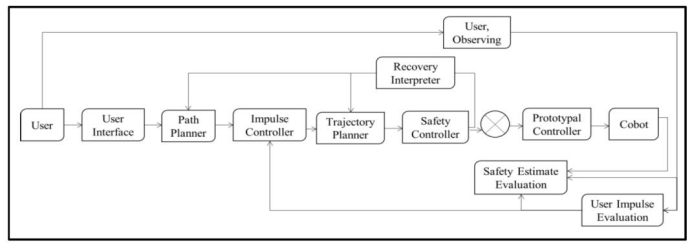
图1 人机交互系统总体架构
基于Kinova Gen 3的安全系统设计
(一)仿真平台与硬件配置
研究采用Gazebo 开源 3D机器人仿真器搭建家庭环境,模拟客厅等典型场景,设置移动人员、家具等动态与静态障碍。
虚拟Kinova Gen3机械臂搭载红外(IR)距离传感器,采用飞行时间(ToF)原理,通过发射与接收红外脉冲计算障碍物距离,获取范围与视场信息,将人体视为 "虚拟障碍" 进行实时监测。系统分为全局路径规划与本地轨迹修正两层,全局负责任务路径生成,本地根据传感信息动态调整。
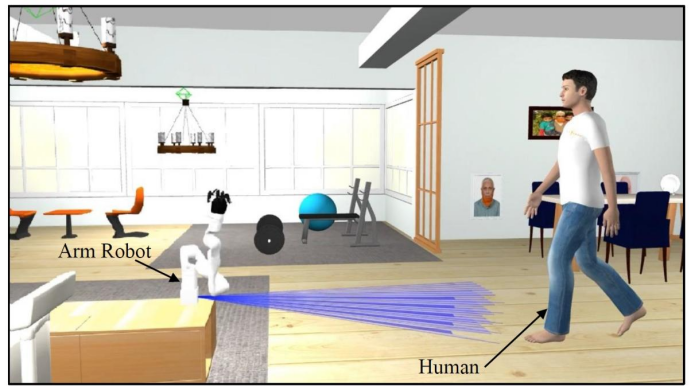
图2 Gazebo 仿真环境搭建
(二)安全算法框架
算法以实时危险检测与轨迹自适应为核心,流程包括:
-
初始化:设定安全阈值、机械臂最大运行速度等参数;
-
障碍检测:红外传感器采集距离数据,识别人体与障碍物位置;
-
动态规划:基于开放运动规划库(OMPL)调用RRT算法,在满足运动学约束下随机采样扩展路径,绕开障碍;
-
速度调节:依据人机距离实时调整关节速度,距离低于阈值时减速直至停机;
-
状态确认:完成安全评估后继续执行或保持停机状态。
-
该框架充分利用Kinova Gen3冗余自由度特性,在避障时保持任务连续性,提升家庭场景的适配性。
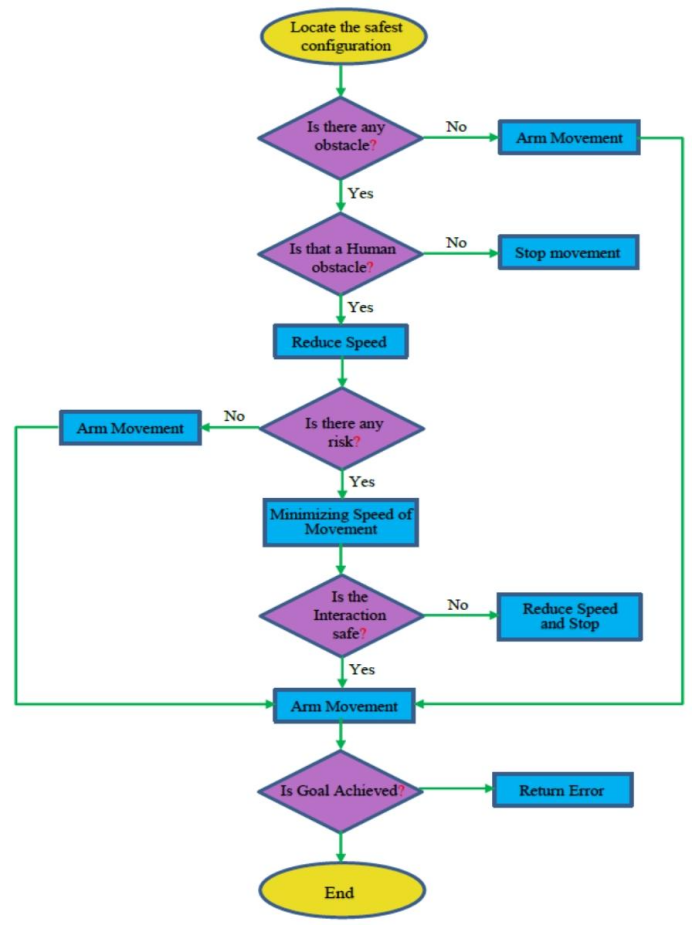
图3 所提出安全算法的流程
(三)传感与规划协同机制
红外传感器提供近距离距离反馈,RRT算法负责高维空间的动态路径生成。机械臂根据距离分级控制:安全范围内正常运行;接近阈值时平滑减速;低于阈值立即停止,兼顾安全与作业流畅度。这种传感 --- 规划 --- 执行闭环,可应对家庭中人员突然靠近、位置变动等不确定情况。
Kinova Gen 3仿真实验与结果分析
(一)评价指标
实验选取三项指标评估系统性能:安全距离保持能力、避障成功率、轨迹重规划计算效率,并与Sacchi避障算法对比,验证改进效果。
(二)实验结果
在多组动态场景下,Kinova Gen3机械臂的测试数据显示:
-
安全距离保持均值约0.75米,高于对比算法;
-
避障成功率约98%,可有效应对人员移动场景;
-
轨迹重规划耗时约0.2 秒,具备实时响应能力;
-
仿真中碰撞次数较少,姿态稳定,俯仰、滚转与偏航角变化平稳。
-
结果表明,该安全算法可帮助Kinova Gen3 在家庭动态环境中稳定保持安全距离,对人员突发靠近有较快响应,轨迹调整平滑,符合非结构化场景的交互需求。
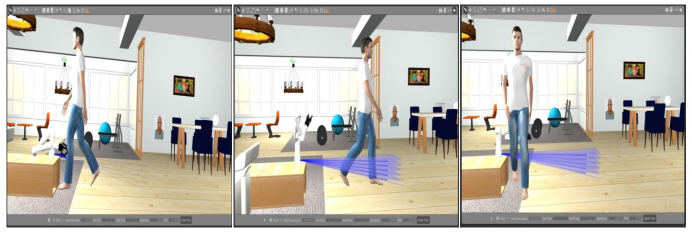
图4 人机交互仿真效果
(三)场景适配性分析
在不同光照、不同人数、突发障碍等条件下,系统均能完成距离监测与路径修正RViz与Gazebo联合可视化显示,机械臂末端轨迹平滑,关节速度波动小,在靠近人体时可平稳减速并停机,验证了方案在家庭复杂场景下的可靠性。
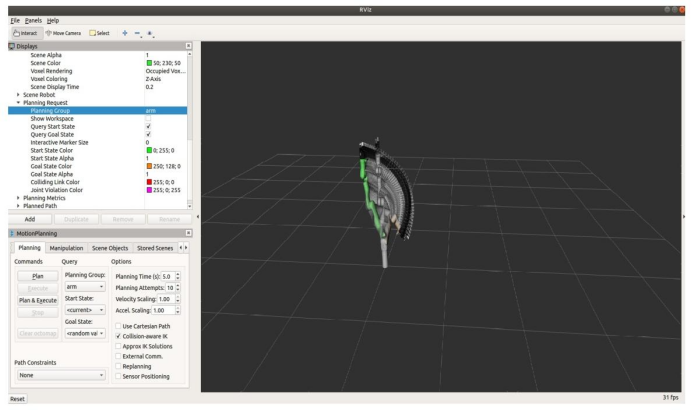
图5 机械臂在RViz 中的运动显示
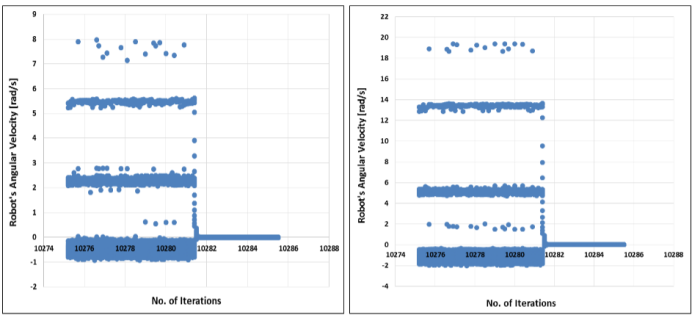
图6 分别为机器人在X 方向、Y 方向 的角速度与位移曲线图,这些曲线反映了机器人运动控制的精度与稳定性。
研究结论与展望
本研究以Kinova Gen3 7自由度机械臂为对象,融合红外近距离传感与RRT动态规划,形成一套适用于家庭环境的人机交互安全方案。实验表明,该方案可提升安全距离保持水平与避障成功率,计算效率满足实时性要求,符合 ISO/TS 15066:2016 相关安全导向,为家用协作机器人安全设计提供可行思路。
未来可从多方面优化:引入多传感器融合提升鲁棒性;结合人体行为预测进一步提前响应;在真实Kinova Gen3硬件上开展实测,完善长期稳定运行验证。随着安全算法持续迭代,协作机械臂将更安全地融入家庭生活,为人机协同提供稳定支撑。
**项目详情:**https://www.akademiabaru.com/