基于核密度估计的BP-KDE多输入单输出回归模型
摘要:本文介绍一种将传统BP神经网络与核密度估计(KDE)相结合的回归预测框架------BP-KDE模型。该模型不仅能完成多输入单输出的点预测任务,还能通过KDE对误差分布进行精细刻画,进而构建概率预测区间,输出更具统计可信度的预测结果。文章将结合完整的MATLAB实现代码,逐步讲解模型原理、工程细节与评估指标。
目录
背景与动机
在工程预测、金融建模、气象分析等实际场景中,仅输出一个"点预测值"往往是不够的。决策者更需要知道:这个预测值可靠吗?误差有多大?真实值落在哪个区间的概率更高?
传统BP神经网络(Back Propagation Neural Network)是解决非线性回归问题的经典工具,但它天然只给出点预测,缺乏对预测不确定性的量化能力。
核密度估计(Kernel Density Estimation, KDE) 是一种非参数化的概率密度估计方法,无需假设误差服从特定分布(如高斯分布),能够从数据本身出发,自适应地刻画误差的真实分布形态。
将两者结合,形成 BP-KDE 框架,可以:
- ✅ 利用BP网络的强拟合能力完成点预测
- ✅ 利用KDE精确描绘误差的概率分布
- ✅ 基于误差分布构建预测区间,量化预测不确定性
- ✅ 输出PICP、PINAW等区间评估指标,全面衡量模型质量
模型架构总览
输入特征 X (n_features × n_samples)
│
▼
┌─────────────┐
│ 数据归一化 │ mapminmax → [-1, 1]
└──────┬──────┘
│
▼
┌─────────────────────────────────┐
│ BP 神经网络 │
│ 输入层 → 隐藏层(logsig) → │
│ 输出层(purelin) │
│ 训练算法: Levenberg-Marquardt │
└──────────────┬──────────────────┘
│ 点预测值 Ŷ
▼
┌─────────────────────────────────┐
│ 误差计算 e = Ŷ - Y_true │
└──────────────┬──────────────────┘
│
┌───────┴────────┐
▼ ▼
┌─────────────┐ ┌─────────────────┐
│ KDE 分析 │ │ 区间估计 │
│ 可视化误差 │ │ Upper/Lower 界 │
│ 概率密度 │ │ PICP & PINAW │
└─────────────┘ └─────────────────┘数据预处理
数据划分
代码使用 dividerand 函数将数据集按 7:3 的比例随机划分为训练集与测试集:
matlab
[trainInd, valInd, testInd] = dividerand(size(X,2), 0.7, 0, 0.3);| 子集 | 比例 | 用途 |
|---|---|---|
| 训练集 | 70% | 网络权值学习 |
| 测试集 | 30% | 泛化性能评估 |
归一化处理
神经网络对输入数据的尺度非常敏感,因此对输入特征 X 和标签 Y 均采用 最小-最大归一化 ,将数值映射至 [-1, 1]:
matlab
[Pn_train, inputps] = mapminmax(P_train, -1, 1);
[Tn_train, outputps] = mapminmax(T_train, -1, 1);注意 :测试集的归一化参数必须复用训练集的
inputps和outputps,严禁对测试集重新计算归一化参数,以防止数据泄露。
matlab
Pn_test = mapminmax('apply', P_test, inputps);
Tn_test = mapminmax('apply', T_test, outputps);BP神经网络构建与训练
网络拓扑结构
本模型采用经典的三层前馈网络:
| 层次 | 节点数 | 激活函数 | 说明 |
|---|---|---|---|
| 输入层 | size(X,1) |
--- | 与特征维度一致 |
| 隐藏层 | 8 | logsig |
S型函数,捕捉非线性特征 |
| 输出层 | size(Y,1) |
purelin |
线性输出,适合回归任务 |
matlab
inputnum = size(X, 1); % 输入特征数
hiddennum = 8; % 隐藏层节点数(可调)
outputnum = size(Y, 1); % 输出维度(单输出为1)
net = newff(minmax(Pn_train), [hiddennum outputnum], ...
{'logsig', 'purelin'}, 'trainlm');训练参数配置
matlab
net.trainparam.epochs = 500; % 最大迭代次数
net.trainparam.goal = 1e-4; % 训练目标误差
net.trainParam.lr = 1e-4; % 学习率训练算法:Levenberg-Marquardt(LM)
本模型使用 trainlm 算法,即 Levenberg-Marquardt 优化算法。LM算法结合了梯度下降法和高斯-牛顿法的优点:
-
在误差较大时,行为接近梯度下降,稳定收敛
-
在误差较小时,行为接近牛顿法,收敛速度极快
-
特别适合中小规模数据集上的神经网络训练
LM更新规则:Δw = -(J^T J + λI)^{-1} J^T e
其中 J 为雅可比矩阵,λ 为阻尼因子,e 为误差向量。
核密度估计(KDE)误差分析
KDE基本原理
核密度估计是一种非参数密度估计 方法。对于 n n n 个误差样本 { e 1 , e 2 , ... , e n } \{e_1, e_2, \ldots, e_n\} {e1,e2,...,en},KDE构造的密度函数为:
f ^ ( x ) = 1 n h ∑ i = 1 n K ( x − e i h ) \hat{f}(x) = \frac{1}{n h} \sum_{i=1}^{n} K\!\left(\frac{x - e_i}{h}\right) f^(x)=nh1i=1∑nK(hx−ei)
其中:
- K ( ⋅ ) K(\cdot) K(⋅) 为核函数(常用高斯核: K ( u ) = 1 2 π e − u 2 / 2 K(u) = \frac{1}{\sqrt{2\pi}} e^{-u^2/2} K(u)=2π 1e−u2/2)
- h h h 为带宽(bandwidth),控制密度曲线的平滑程度
与直方图相比,KDE的优势在于:
| 对比项 | 直方图 | KDE |
|---|---|---|
| 连续性 | 分段阶梯,不连续 | 连续光滑曲线 |
| 对bin宽敏感 | 非常敏感 | 自动带宽选择 |
| 分布形态展示 | 粗粒度 | 精细描绘尾部 |
代码实现
matlab
% 训练集误差 KDE
[f_train, xi_train] = ksdensity(TrainError);
plot(xi_train, f_train, 'Color', [0.8 0.2 0.2], 'LineWidth', 2);
% 测试集误差 KDE
[f_test, xi_test] = ksdensity(TestError);
plot(xi_test, f_test, 'Color', [0.8 0.2 0.2], 'LineWidth', 2);MATLAB的 ksdensity 函数默认使用高斯核,并采用 Silverman 经验法则自动选择最优带宽:
h ∗ = 1.06 ⋅ σ ^ ⋅ n − 1 / 5 h^* = 1.06 \cdot \hat{\sigma} \cdot n^{-1/5} h∗=1.06⋅σ^⋅n−1/5
从KDE图中读取信息
通过观察KDE曲线,可以判断:
- 峰值位置:误差的集中趋势(是否系统性偏大或偏小)
- 曲线宽度:误差的离散程度(越窄说明预测越稳定)
- 对称性:误差是否存在系统性偏差(偏斜分布暗示模型有偏)
- 尾部厚重程度:是否存在大误差的异常样本
区间预测:从点估计到概率区间
构建预测区间
在本框架中,假设预测误差近似服从正态分布,利用误差标准差构建 95% 预测区间:
Y ^ upper = Y ^ + Z α / 2 ⋅ σ ^ e \hat{Y}{\text{upper}} = \hat{Y} + Z{\alpha/2} \cdot \hat{\sigma}e Y^upper=Y^+Zα/2⋅σ^e
Y ^ lower = Y ^ − Z α / 2 ⋅ σ ^ e \hat{Y}{\text{lower}} = \hat{Y} - Z_{\alpha/2} \cdot \hat{\sigma}_e Y^lower=Y^−Zα/2⋅σ^e
其中:
- Z α / 2 = 1.96 Z_{\alpha/2} = 1.96 Zα/2=1.96(对应95%置信水平)
- σ ^ e = std ( TestError ) \hat{\sigma}_e = \text{std}(\text{TestError}) σ^e=std(TestError),测试集误差标准差
matlab
Z_value = 1.96;
std_error = std(TestError);
Upper_Bound = TestResults + Z_value * std_error;
Lower_Bound = TestResults - Z_value * std_error;扩展提示:若KDE分析表明误差分布明显非正态(如重尾、偏斜),可改用KDE的分位数来确定上下界,从而构建更准确的非参数预测区间。
综合评估指标体系
模型从点预测精度 和区间预测质量两个维度进行评估。
点预测指标
| 指标 | 公式 | 说明 |
|---|---|---|
| MAE(平均绝对误差) | 1 n ∑ ∣ e i ∣ \frac{1}{n}\sum|e_i| n1∑∣ei∣ | 对异常值不敏感,直观反映平均偏差 |
| RMSE(均方根误差) | 1 n ∑ e i 2 \sqrt{\frac{1}{n}\sum e_i^2} n1∑ei2 | 对大误差惩罚更强,反映误差波动 |
| R²(决定系数) | 1 − SS res SS tot 1 - \frac{\text{SS}\text{res}}{\text{SS}\text{tot}} 1−SStotSSres | 越接近1越好,衡量拟合优度 |
| MAPE(平均绝对百分比误差) | 1 n ∑ ∣ e i ∣ y i × 100 % \frac{1}{n}\sum\frac{|e_i|}{y_i} \times 100\% n1∑yi∣ei∣×100% | 相对误差,便于跨尺度比较 |
matlab
MAE1 = sum(abs(TestError)) / len;
MSE1 = TestError * TestError' / len;
RMSE1 = sqrt(MSE1);
R = corrcoef(T_test, TestResults);
r2 = R(1,2)^2;
MAPE = calculateMAPE(T_test, TestResults);区间预测指标
PICP(预测区间覆盖率):
PICP = 1 n ∑ i = 1 n 1 y i ∈ \[ y \^ i L , y \^ i U ] \text{PICP} = \frac{1}{n} \sum_{i=1}^{n} \mathbf{1}\lefty_i \\in \[\\hat{y}_i\^L, \\hat{y}_i\^U\right] PICP=n1i=1∑n1yi∈\[y\^iL,y\^iU]
- 衡量真实值落入预测区间的比例
- 95%置信水平下,理想PICP ≈ 95%
- PICP过低:区间太窄,可靠性不足;PICP过高:区间太宽,参考价值有限
PINAW(预测区间归一化平均宽度):
PINAW = 1 n ⋅ R ∑ i = 1 n ( y ^ i U − y ^ i L ) \text{PINAW} = \frac{1}{n \cdot R} \sum_{i=1}^{n} \left(\hat{y}_i^U - \hat{y}_i^L\right) PINAW=n⋅R1i=1∑n(y^iU−y^iL)
其中 R = max ( Y ) − min ( Y ) R = \max(Y) - \min(Y) R=max(Y)−min(Y) 为标签值域范围。
- 衡量区间的"紧致程度"
- 在PICP满足要求的前提下,PINAW越小越好
matlab
is_covered = (T_test >= Lower_Bound) & (T_test <= Upper_Bound);
PICP = sum(is_covered) / len;
interval_widths = Upper_Bound - Lower_Bound;
range_T = max(T_test) - min(T_test);
PINAW = mean(interval_widths) / range_T;优质模型的标准:PICP ≈ 95%(达标),PINAW尽量小(精确)。二者之间存在权衡关系,需综合评价。
完整代码解析
完整代码按照以下流程组织,模块清晰、逻辑连贯:
Step 1: 导入数据(load data.mat)
↓
Step 2: 划分训练/测试集(dividerand,7:3)
↓
Step 3: 数据归一化(mapminmax,[-1,1])
↓
Step 4: 构建BP网络(newff,隐藏层8节点,LM算法)
↓
Step 5: 训练网络(train)
↓
Step 6: 训练集/测试集预测(sim + mapminmax reverse)
↓
Step 7: 误差计算 & KDE分析(ksdensity)
↓
Step 8: 计算点预测指标(MAE/RMSE/R²/MAPE)
↓
Step 9: 构建预测区间(Z=1.96 × std_error)
↓
Step 10: 计算区间指标(PICP/PINAW)
↓
Step 11: 可视化(3组图窗)& 终端输出关键自定义函数:MAPE计算
matlab
function mape = calculateMAPE(actual, forecast)
absolute_error = abs(actual - forecast);
valid_idx = actual ~= 0; % 排除真实值为0的样本,避免除零
percentage_error = absolute_error(valid_idx) ./ actual(valid_idx);
mape = mean(percentage_error) * 100;
end此函数特别处理了真实值为零 的边界情况,避免MAPE计算时出现
Inf或NaN。
结果可视化说明
代码共生成 3组图窗 ,覆盖从基础到高级的完整分析视角:
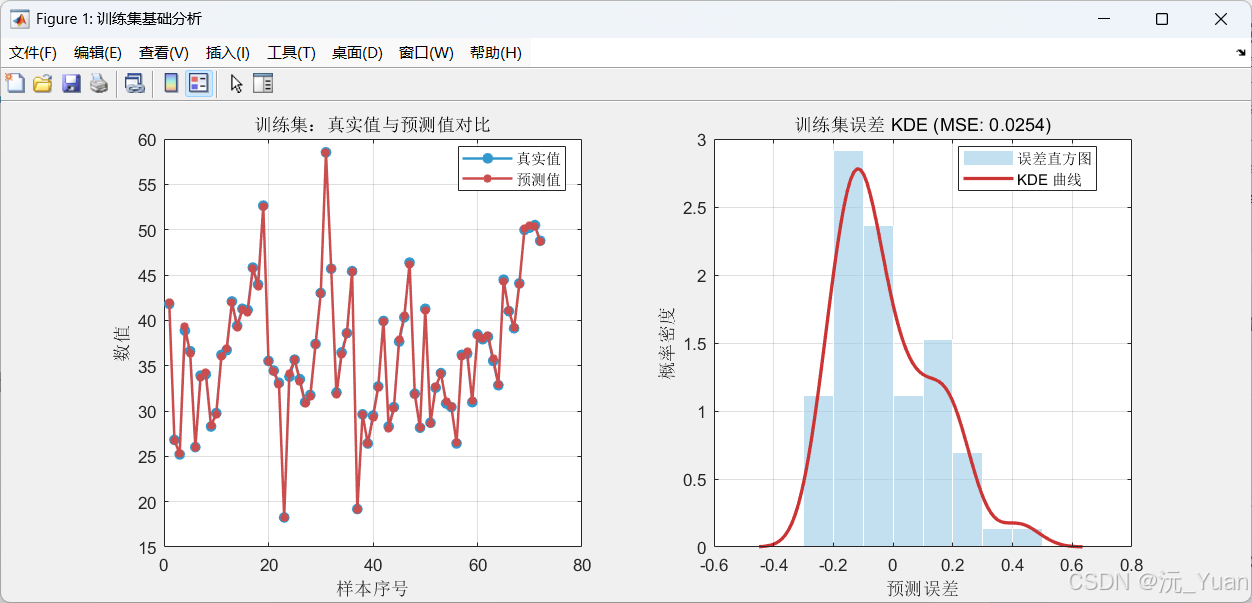
图窗1:训练集基础分析
| 子图 | 内容 | 关注点 |
|---|---|---|
| 左图 | 真实值 vs 预测值折线对比 | 曲线贴合程度,是否存在系统性偏差 |
| 右图 | 训练集误差直方图 + KDE曲线 | 误差分布形态,是否对称,峰值位置 |
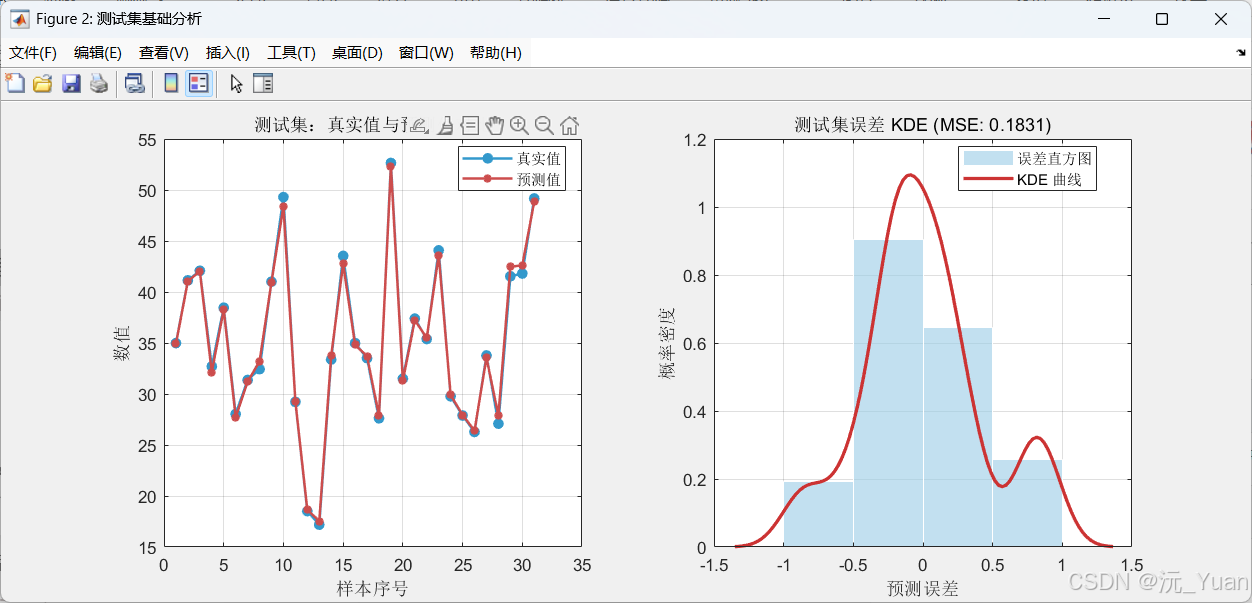
图窗2:测试集基础分析
与训练集类似,但更重要------测试集结果反映模型的真实泛化能力。
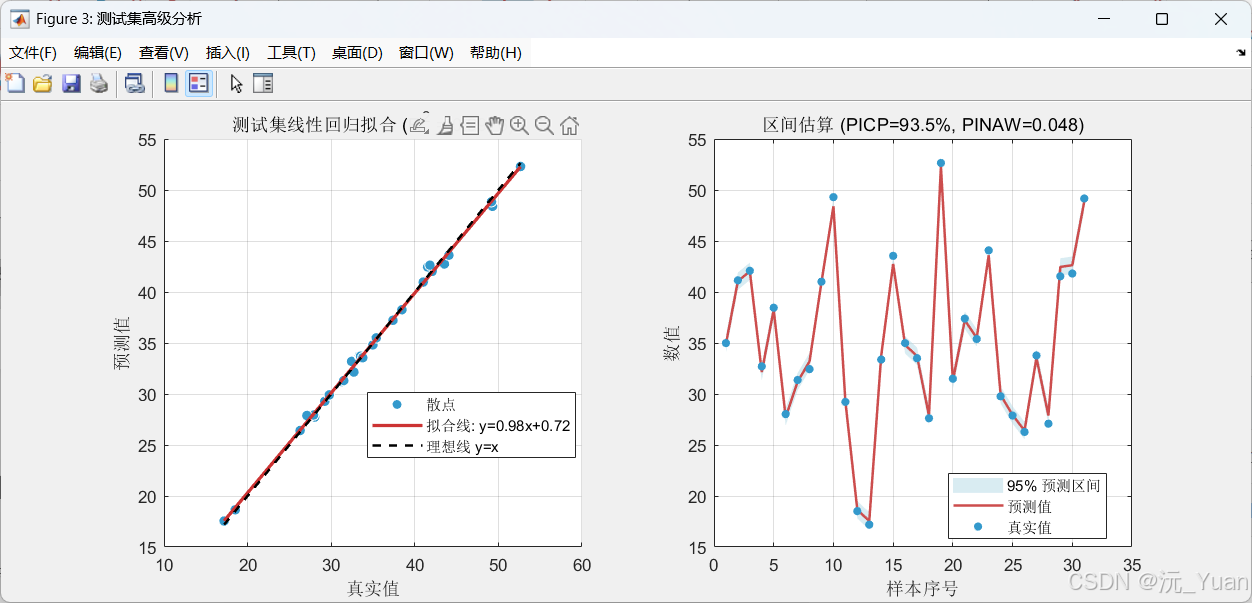
图窗3:测试集高级分析
| 子图 | 内容 | 关注点 |
|---|---|---|
| 左图 | 散点图 + 线性拟合线 + 理想线(y=x) | R²值,拟合线与理想线的偏离程度 |
| 右图 | 预测区间阴影图(真实值 vs 预测值 vs 95%区间) | PICP是否达标,区间宽窄是否合理 |
总结与展望
本文小结
BP-KDE框架通过以下三步实现了从"点预测"到"概率预测"的跨越:
- BP神经网络完成非线性映射,输出点预测值
- KDE分析对预测残差进行非参数密度估计,揭示误差的真实分布
- 区间构建基于误差统计特性生成预测上下界,量化预测不确定性
潜在改进方向
| 方向 | 说明 |
|---|---|
| 非参数区间 | 直接用KDE的分位数构建区间,替代正态假设,适用于非对称误差分布 |
| Dropout不确定性 | 在网络中引入Dropout,通过多次前向推断估计预测方差 |
| 集成方法 | 训练多个BP网络,用集成预测的方差作为不确定性估计 |
| 自适应带宽KDE | 使用局部带宽KDE,对误差分布的局部结构有更强的刻画能力 |
| 深度网络 | 将BP替换为LSTM/Transformer等序列模型,适用于时序预测场景 |
📌 数据准备提示 :运行代码前,请确保
data.mat文件中包含变量X(特征矩阵,维度为n_features × n_samples)和Y(标签矩阵,维度为1 × n_samples)。如需快速测试,可取消注释代码中的随机数据生成行:
matlabX = rand(5, 100); Y = rand(1, 100);