一、建图流程
1. 建图流程
启动相机后,在ORB_SLAM3的ROS2封装包的工作空间下启动建图:
bash
ros2 run orbslam3 rgbd ~/d7lros2/orb_slam3_ws/src/ORB_SLAM3_ROS2/vocabulary/ORBvoc.txt ~/d7lros2/orb_slam3_ws/src/ORB_SLAM3_ROS2/config/rgbd/d435.yaml --ros-args -r /camera/color/image_raw:=/camera/camera/color/image_raw -r /camera/depth/image_rect_raw:=/camera/camera/aligned_depth_to_color/image_raw
bash
robot@ll-Lenovo:~/d7lros2/orb_slam3_ws$ ros2 run orbslam3 rgbd ~/d7lros2/orb_slam3_ws/src/ORB_SLAM3_ROS2/vocabulary/ORBvoc.txt ~/d7lros2/orb_slam3_ws/src/ORB_SLAM3_ROS2/config/rgbd/d435.yaml --ros-args -r /camera/color/image_raw:=/camera/camera/color/image_raw -r /camera/depth/image_rect_raw:=/camera/camera/aligned_depth_to_color/image_raw
ORB-SLAM3 Copyright (C) 2017-2020 Carlos Campos, Richard Elvira, Juan J. Gómez, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
ORB-SLAM2 Copyright (C) 2014-2016 Raúl Mur-Artal, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
This program comes with ABSOLUTELY NO WARRANTY;
This is free software, and you are welcome to redistribute it
under certain conditions. See LICENSE.txt.
Input sensor was set to: RGB-D
Loading ORB Vocabulary. This could take a while...
Vocabulary loaded!
Initialization of Atlas from scratch
Creation of new map with id: 0
Creation of new map with last KF id: 0
Seq. Name:
Camera Parameters:
- Camera: Pinhole
- Image scale: 0.5
- fx: 308.6
- fy: 308.681
- cx: 162.318
- cy: 121.231
- k1: 0
- k2: 0
- p1: 0
- p2: 0
- fps: 30
- color order: RGB (ignored if grayscale)
Depth Threshold (Close/Far Points): 2
ORB Extractor Parameters:
- Number of Features: 1250
- Scale Levels: 8
- Scale Factor: 1.2
- Initial Fast Threshold: 20
- Minimum Fast Threshold: 7
There are 1 cameras in the atlas
Camera 0 is pinhole
============================
ORB-SLAM3 RGB-D node started. Waiting for images...
Starting the Viewer
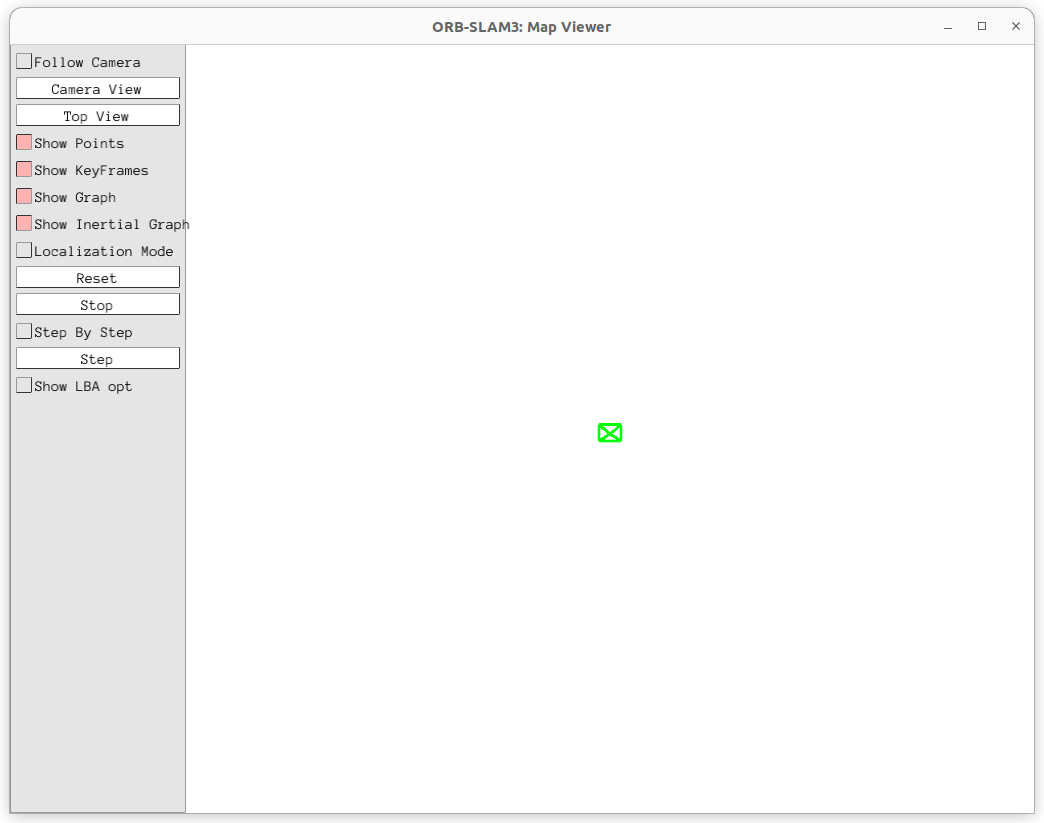
成功启动后,你会看到两个窗口:
Map Viewer: 显示3D地图点云和相机轨迹的交互式窗口。
Current Frame: 显示当前相机画面及ORB特征点。
缓慢、平稳地移动相机,就像在扫描周围环境。ORB-SLAM3会根据特征点进行实时定位和建图。
2. 理解并使用Map Viewer控制面板
**Map Viewer**窗口上的控制面板是交互的关键:
| 按钮/选项 | 功能说明 |
|---|---|
| Follow Camera | 勾选后,视角会自动跟随相机的当前位置,适合实时建图时观察。 |
| Show Points | 显示或隐藏地图中的稀疏点云。默认应该开启。 |
| Show KeyFrames | 显示或隐藏关键帧(以蓝色相机模型表示)。 |
| Show Graph | 显示关键帧之间的共视图(绿色连线),表示它们之间的视觉关联。 |
| Reset | 清除当前地图并重新初始化。注意:这会丢失未保存的地图数据。 |
| Stop | 停止SLAM线程并保存相机轨迹文件。这在结束建图前需要操作。 |
使用建议:
-
建图初期,推荐勾选 Follow Camera,方便了解相机视野。
-
当想观察已构建地图的全貌时,可以取消 Follow Camera,然后用鼠标拖拽、滚轮来自由查看3D地图。
-
如果想追踪系统状态,可以观察
Current Frame窗口顶部的状态栏信息。
二、地图保存
一般我们需要在其他软件(如CloudCompare、PCL库)中分析或使用地图点云,就需要将地图保存为通用的.pcd格式。
1.安装PCL库
打开终端,依次输入:
bash
sudo apt update && sudo apt upgrade -y
bash
sudo apt-get install libpcl-dev pcl-tools2. 修改源码并重新编译
需要修改ORB-SLAM3源码,将地图点云写入PCD文件。
通常涉及修改两个文件:
CMakeLists.txt: 添加PCL库的依赖。
src/MapDrawer.cc: 增加保存PCD文件的代码。
(1)修改 CMakeLists.txt
找到 find_package 区域,添加以下行:
bash
find_package(PCL REQUIRED)找到 include_directories 区域,添加 PCL 的头文件路径:
bash
include_directories(
${PROJECT_SOURCE_DIR}
${PROJECT_SOURCE_DIR}/include
${PROJECT_SOURCE_DIR}/include/CameraModels
${PROJECT_SOURCE_DIR}/Thirdparty/Sophus
${EIGEN3_INCLUDE_DIR}
${Pangolin_INCLUDE_DIRS}
${PCL_INCLUDE_DIRS} # <--- 添加这一行
)找到构建 ORB-SLAM3 库的 target_link_libraries 指令,在其中添加:
bash
target_link_libraries(${PROJECT_NAME}
# ... 其他库 ...
${Pangolin_LIBRARIES}
${PCL_LIBRARIES} # <--- 添加这一行
)我这里直接给出修改后的完整CMakeLists.txt文件提供参考:
bash
cmake_minimum_required(VERSION 2.8)
set(CMAKE_CXX_STANDARD 14)
project(ORB_SLAM3)
IF(NOT CMAKE_BUILD_TYPE)
SET(CMAKE_BUILD_TYPE Release)
ENDIF()
MESSAGE("Build type: " ${CMAKE_BUILD_TYPE})
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall -O3")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -O3")
set(CMAKE_C_FLAGS_RELEASE "${CMAKE_C_FLAGS_RELEASE} -march=native")
set(CMAKE_CXX_FLAGS_RELEASE "${CMAKE_CXX_FLAGS_RELEASE} -march=native")
# Check C++11 or C++0x support
include(CheckCXXCompilerFlag)
CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11)
CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
if(COMPILER_SUPPORTS_CXX11)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
add_definitions(-DCOMPILEDWITHC11)
message(STATUS "Using flag -std=c++11.")
elseif(COMPILER_SUPPORTS_CXX0X)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")
add_definitions(-DCOMPILEDWITHC0X)
message(STATUS "Using flag -std=c++0x.")
else()
message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++11 support. Please use a different C++ compiler.")
endif()
LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules)
find_package(OpenCV 4.4)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 4.4 not found.")
endif()
MESSAGE("OPENCV VERSION:")
MESSAGE(${OpenCV_VERSION})
find_package(Eigen3 3.1.0 REQUIRED)
find_package(Pangolin REQUIRED)
find_package(realsense2)
find_package(PCL REQUIRED)
include_directories(
${PROJECT_SOURCE_DIR}
${PROJECT_SOURCE_DIR}/include
${PROJECT_SOURCE_DIR}/include/CameraModels
${PROJECT_SOURCE_DIR}/Thirdparty/Sophus
${EIGEN3_INCLUDE_DIR}
${Pangolin_INCLUDE_DIRS}
${PCL_INCLUDE_DIRS}
)
set(CMAKE_LIBRARY_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/lib)
add_library(${PROJECT_NAME} SHARED
src/System.cc
src/Tracking.cc
src/LocalMapping.cc
src/LoopClosing.cc
src/ORBextractor.cc
src/ORBmatcher.cc
src/FrameDrawer.cc
src/Converter.cc
src/MapPoint.cc
src/KeyFrame.cc
src/Atlas.cc
src/Map.cc
src/MapDrawer.cc
src/Optimizer.cc
src/Frame.cc
src/KeyFrameDatabase.cc
src/Sim3Solver.cc
src/Viewer.cc
src/ImuTypes.cc
src/G2oTypes.cc
src/CameraModels/Pinhole.cpp
src/CameraModels/KannalaBrandt8.cpp
src/OptimizableTypes.cpp
src/MLPnPsolver.cpp
src/GeometricTools.cc
src/TwoViewReconstruction.cc
src/Config.cc
src/Settings.cc
include/System.h
include/Tracking.h
include/LocalMapping.h
include/LoopClosing.h
include/ORBextractor.h
include/ORBmatcher.h
include/FrameDrawer.h
include/Converter.h
include/MapPoint.h
include/KeyFrame.h
include/Atlas.h
include/Map.h
include/MapDrawer.h
include/Optimizer.h
include/Frame.h
include/KeyFrameDatabase.h
include/Sim3Solver.h
include/Viewer.h
include/ImuTypes.h
include/G2oTypes.h
include/CameraModels/GeometricCamera.h
include/CameraModels/Pinhole.h
include/CameraModels/KannalaBrandt8.h
include/OptimizableTypes.h
include/MLPnPsolver.h
include/GeometricTools.h
include/TwoViewReconstruction.h
include/SerializationUtils.h
include/Config.h
include/Settings.h)
add_subdirectory(Thirdparty/g2o)
target_link_libraries(${PROJECT_NAME}
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PCL_LIBRARIES}
${PROJECT_SOURCE_DIR}/Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/Thirdparty/g2o/lib/libg2o.so
-lboost_serialization
-lcrypto
)
# If RealSense SDK is found the library is added and its examples compiled
if(realsense2_FOUND)
include_directories(${PROJECT_NAME}
${realsense_INCLUDE_DIR}
)
target_link_libraries(${PROJECT_NAME}
${realsense2_LIBRARY}
)
endif()
# Build examples
# RGB-D examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/RGB-D)
add_executable(rgbd_tum
Examples/RGB-D/rgbd_tum.cc)
target_link_libraries(rgbd_tum ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(rgbd_realsense_D435i
Examples/RGB-D/rgbd_realsense_D435i.cc)
target_link_libraries(rgbd_realsense_D435i ${PROJECT_NAME})
endif()
# RGB-D inertial examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/RGB-D-Inertial)
if(realsense2_FOUND)
add_executable(rgbd_inertial_realsense_D435i
Examples/RGB-D-Inertial/rgbd_inertial_realsense_D435i.cc)
target_link_libraries(rgbd_inertial_realsense_D435i ${PROJECT_NAME})
endif()
#Stereo examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Stereo)
add_executable(stereo_kitti
Examples/Stereo/stereo_kitti.cc)
target_link_libraries(stereo_kitti ${PROJECT_NAME})
add_executable(stereo_euroc
Examples/Stereo/stereo_euroc.cc)
target_link_libraries(stereo_euroc ${PROJECT_NAME})
add_executable(stereo_tum_vi
Examples/Stereo/stereo_tum_vi.cc)
target_link_libraries(stereo_tum_vi ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(stereo_realsense_t265
Examples/Stereo/stereo_realsense_t265.cc)
target_link_libraries(stereo_realsense_t265 ${PROJECT_NAME})
add_executable(stereo_realsense_D435i
Examples/Stereo/stereo_realsense_D435i.cc)
target_link_libraries(stereo_realsense_D435i ${PROJECT_NAME})
endif()
#Monocular examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Monocular)
add_executable(mono_tum
Examples/Monocular/mono_tum.cc)
target_link_libraries(mono_tum ${PROJECT_NAME})
add_executable(mono_kitti
Examples/Monocular/mono_kitti.cc)
target_link_libraries(mono_kitti ${PROJECT_NAME})
add_executable(mono_euroc
Examples/Monocular/mono_euroc.cc)
target_link_libraries(mono_euroc ${PROJECT_NAME})
add_executable(mono_tum_vi
Examples/Monocular/mono_tum_vi.cc)
target_link_libraries(mono_tum_vi ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(mono_realsense_t265
Examples/Monocular/mono_realsense_t265.cc)
target_link_libraries(mono_realsense_t265 ${PROJECT_NAME})
add_executable(mono_realsense_D435i
Examples/Monocular/mono_realsense_D435i.cc)
target_link_libraries(mono_realsense_D435i ${PROJECT_NAME})
endif()
#Monocular inertial examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Monocular-Inertial)
add_executable(mono_inertial_euroc
Examples/Monocular-Inertial/mono_inertial_euroc.cc)
target_link_libraries(mono_inertial_euroc ${PROJECT_NAME})
add_executable(mono_inertial_tum_vi
Examples/Monocular-Inertial/mono_inertial_tum_vi.cc)
target_link_libraries(mono_inertial_tum_vi ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(mono_inertial_realsense_t265
Examples/Monocular-Inertial/mono_inertial_realsense_t265.cc)
target_link_libraries(mono_inertial_realsense_t265 ${PROJECT_NAME})
add_executable(mono_inertial_realsense_D435i
Examples/Monocular-Inertial/mono_inertial_realsense_D435i.cc)
target_link_libraries(mono_inertial_realsense_D435i ${PROJECT_NAME})
endif()
#Stereo Inertial examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Stereo-Inertial)
add_executable(stereo_inertial_euroc
Examples/Stereo-Inertial/stereo_inertial_euroc.cc)
target_link_libraries(stereo_inertial_euroc ${PROJECT_NAME})
add_executable(stereo_inertial_tum_vi
Examples/Stereo-Inertial/stereo_inertial_tum_vi.cc)
target_link_libraries(stereo_inertial_tum_vi ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(stereo_inertial_realsense_t265
Examples/Stereo-Inertial/stereo_inertial_realsense_t265.cc)
target_link_libraries(stereo_inertial_realsense_t265 ${PROJECT_NAME})
add_executable(stereo_inertial_realsense_D435i
Examples/Stereo-Inertial/stereo_inertial_realsense_D435i.cc)
target_link_libraries(stereo_inertial_realsense_D435i ${PROJECT_NAME})
endif()
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Calibration)
if(realsense2_FOUND)
add_executable(recorder_realsense_D435i
Examples/Calibration/recorder_realsense_D435i.cc)
target_link_libraries(recorder_realsense_D435i ${PROJECT_NAME})
add_executable(recorder_realsense_T265
Examples/Calibration/recorder_realsense_T265.cc)
target_link_libraries(recorder_realsense_T265 ${PROJECT_NAME})
endif()
#Old examples
# RGB-D examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/RGB-D)
add_executable(rgbd_tum_old
Examples_old/RGB-D/rgbd_tum.cc)
target_link_libraries(rgbd_tum_old ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(rgbd_realsense_D435i_old
Examples_old/RGB-D/rgbd_realsense_D435i.cc)
target_link_libraries(rgbd_realsense_D435i_old ${PROJECT_NAME})
endif()
# RGB-D inertial examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/RGB-D-Inertial)
if(realsense2_FOUND)
add_executable(rgbd_inertial_realsense_D435i_old
Examples_old/RGB-D-Inertial/rgbd_inertial_realsense_D435i.cc)
target_link_libraries(rgbd_inertial_realsense_D435i_old ${PROJECT_NAME})
endif()
#Stereo examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Stereo)
add_executable(stereo_kitti_old
Examples_old/Stereo/stereo_kitti.cc)
target_link_libraries(stereo_kitti_old ${PROJECT_NAME})
add_executable(stereo_euroc_old
Examples_old/Stereo/stereo_euroc.cc)
target_link_libraries(stereo_euroc_old ${PROJECT_NAME})
add_executable(stereo_tum_vi_old
Examples_old/Stereo/stereo_tum_vi.cc)
target_link_libraries(stereo_tum_vi_old ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(stereo_realsense_t265_old
Examples_old/Stereo/stereo_realsense_t265.cc)
target_link_libraries(stereo_realsense_t265_old ${PROJECT_NAME})
add_executable(stereo_realsense_D435i_old
Examples_old/Stereo/stereo_realsense_D435i.cc)
target_link_libraries(stereo_realsense_D435i_old ${PROJECT_NAME})
endif()
#Monocular examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Monocular)
add_executable(mono_tum_old
Examples_old/Monocular/mono_tum.cc)
target_link_libraries(mono_tum_old ${PROJECT_NAME})
add_executable(mono_kitti_old
Examples_old/Monocular/mono_kitti.cc)
target_link_libraries(mono_kitti_old ${PROJECT_NAME})
add_executable(mono_euroc_old
Examples_old/Monocular/mono_euroc.cc)
target_link_libraries(mono_euroc_old ${PROJECT_NAME})
add_executable(mono_tum_vi_old
Examples_old/Monocular/mono_tum_vi.cc)
target_link_libraries(mono_tum_vi_old ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(mono_realsense_t265_old
Examples_old/Monocular/mono_realsense_t265.cc)
target_link_libraries(mono_realsense_t265_old ${PROJECT_NAME})
add_executable(mono_realsense_D435i_old
Examples_old/Monocular/mono_realsense_D435i.cc)
target_link_libraries(mono_realsense_D435i_old ${PROJECT_NAME})
endif()
#Monocular inertial examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Monocular-Inertial)
add_executable(mono_inertial_euroc_old
Examples_old/Monocular-Inertial/mono_inertial_euroc.cc)
target_link_libraries(mono_inertial_euroc_old ${PROJECT_NAME})
add_executable(mono_inertial_tum_vi_old
Examples_old/Monocular-Inertial/mono_inertial_tum_vi.cc)
target_link_libraries(mono_inertial_tum_vi_old ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(mono_inertial_realsense_t265_old
Examples_old/Monocular-Inertial/mono_inertial_realsense_t265.cc)
target_link_libraries(mono_inertial_realsense_t265_old ${PROJECT_NAME})
add_executable(mono_inertial_realsense_D435i_old
Examples_old/Monocular-Inertial/mono_inertial_realsense_D435i.cc)
target_link_libraries(mono_inertial_realsense_D435i_old ${PROJECT_NAME})
endif()
#Stereo Inertial examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Stereo-Inertial)
add_executable(stereo_inertial_euroc_old
Examples_old/Stereo-Inertial/stereo_inertial_euroc.cc)
target_link_libraries(stereo_inertial_euroc_old ${PROJECT_NAME})
add_executable(stereo_inertial_tum_vi_old
Examples_old/Stereo-Inertial/stereo_inertial_tum_vi.cc)
target_link_libraries(stereo_inertial_tum_vi_old ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(stereo_inertial_realsense_t265_old
Examples_old/Stereo-Inertial/stereo_inertial_realsense_t265.cc)
target_link_libraries(stereo_inertial_realsense_t265_old ${PROJECT_NAME})
add_executable(stereo_inertial_realsense_D435i_old
Examples_old/Stereo-Inertial/stereo_inertial_realsense_D435i.cc)
target_link_libraries(stereo_inertial_realsense_D435i_old ${PROJECT_NAME})
endif()(2)修改 src/MapDrawer.cc
在 MapDrawer.cc 中植入 PCD 保存功能。
在文件开头的 #include 区域,加入 PCL 必要的头文件:
cpp
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/io/pcd_io.h>在头文件之后、命名空间 ORB_SLAM3 之前,定义一个全局变量,用于记录上次保存的点云数量,避免重复保存:
cpp
extern int pre_num = 0;找到 MapDrawer::DrawMapPoints() 函数的实现,在函数的末尾,加入以下 PCL 保存逻辑。根据你 MapDrawer.cc 中 DrawMapPoints() 函数的具体实现,将以下代码块插入到函数末尾的合适位置:
cpp
// 在 DrawMapPoints() 函数的末尾添加
// 保存地图为PCD文件
const vector<MapPoint*> &vpMPs = mpMap->GetAllMapPoints();
const vector<MapPoint*> &vpRefMPs = mpMap->GetReferenceMapPoints();
set<MapPoint*> spRefMPs(vpRefMPs.begin(), vpRefMPs.end());
if(vpMPs.empty())
return;
// 只保存一次,当参考地图点数量不再增加时保存
if(spRefMPs.size() <= pre_num)
{
// 创建点云对象,XYZ 类型
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_saved(new pcl::PointCloud<pcl::PointXYZ>);
cloud_saved->height = 1;
cloud_saved->is_dense = false;
cloud_saved->points.resize(vpMPs.size());
// 遍历所有地图点,填充点云数据
for(size_t i=0, iend=vpMPs.size(); i<iend; i++)
{
if(vpMPs[i]->isBad())
continue;
cv::Mat pos = vpMPs[i]->GetWorldPos();
cloud_saved->points[i].x = pos.at<float>(0);
cloud_saved->points[i].y = pos.at<float>(1);
cloud_saved->points[i].z = pos.at<float>(2);
}
cloud_saved->width = cloud_saved->points.size();
// 保存为 PCD 文件
pcl::io::savePCDFileASCII("map.pcd", *cloud_saved);
cout << "Saved " << cloud_saved->points.size() << " points to map.pcd" << endl;
// 重置计数器,防止反复保存
pre_num = 0;
} else {
// 更新参考地图点数量,用于判断何时保存
pre_num = spRefMPs.size();
}我这里直接给出修改后的完整MapDrawer.cc文件提供参考:
cpp
/**
* This file is part of ORB-SLAM3
*
* Copyright (C) 2017-2021 Carlos Campos, Richard Elvira, Juan J. Gómez Rodríguez, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
* Copyright (C) 2014-2016 Raúl Mur-Artal, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
*
* ORB-SLAM3 is free software: you can redistribute it and/or modify it under the terms of the GNU General Public
* License as published by the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* ORB-SLAM3 is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even
* the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License along with ORB-SLAM3.
* If not, see <http://www.gnu.org/licenses/>.
*/
#include "MapDrawer.h"
#include "MapPoint.h"
#include "KeyFrame.h"
#include <pangolin/pangolin.h>
#include <mutex>
// ===== 添加 PCL 支持 =====
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/io/pcd_io.h>
namespace ORB_SLAM3
{
// ===== 全局变量,用于判断何时保存地图 =====
int pre_num = 0;
MapDrawer::MapDrawer(Atlas* pAtlas, const string &strSettingPath, Settings* settings):mpAtlas(pAtlas)
{
if(settings){
newParameterLoader(settings);
}
else{
cv::FileStorage fSettings(strSettingPath, cv::FileStorage::READ);
bool is_correct = ParseViewerParamFile(fSettings);
if(!is_correct)
{
std::cerr << "**ERROR in the config file, the format is not correct**" << std::endl;
try
{
throw -1;
}
catch(exception &e)
{
}
}
}
}
void MapDrawer::newParameterLoader(Settings *settings) {
mKeyFrameSize = settings->keyFrameSize();
mKeyFrameLineWidth = settings->keyFrameLineWidth();
mGraphLineWidth = settings->graphLineWidth();
mPointSize = settings->pointSize();
mCameraSize = settings->cameraSize();
mCameraLineWidth = settings->cameraLineWidth();
}
bool MapDrawer::ParseViewerParamFile(cv::FileStorage &fSettings)
{
bool b_miss_params = false;
cv::FileNode node = fSettings["Viewer.KeyFrameSize"];
if(!node.empty())
{
mKeyFrameSize = node.real();
}
else
{
std::cerr << "*Viewer.KeyFrameSize parameter doesn't exist or is not a real number*" << std::endl;
b_miss_params = true;
}
node = fSettings["Viewer.KeyFrameLineWidth"];
if(!node.empty())
{
mKeyFrameLineWidth = node.real();
}
else
{
std::cerr << "*Viewer.KeyFrameLineWidth parameter doesn't exist or is not a real number*" << std::endl;
b_miss_params = true;
}
node = fSettings["Viewer.GraphLineWidth"];
if(!node.empty())
{
mGraphLineWidth = node.real();
}
else
{
std::cerr << "*Viewer.GraphLineWidth parameter doesn't exist or is not a real number*" << std::endl;
b_miss_params = true;
}
node = fSettings["Viewer.PointSize"];
if(!node.empty())
{
mPointSize = node.real();
}
else
{
std::cerr << "*Viewer.PointSize parameter doesn't exist or is not a real number*" << std::endl;
b_miss_params = true;
}
node = fSettings["Viewer.CameraSize"];
if(!node.empty())
{
mCameraSize = node.real();
}
else
{
std::cerr << "*Viewer.CameraSize parameter doesn't exist or is not a real number*" << std::endl;
b_miss_params = true;
}
node = fSettings["Viewer.CameraLineWidth"];
if(!node.empty())
{
mCameraLineWidth = node.real();
}
else
{
std::cerr << "*Viewer.CameraLineWidth parameter doesn't exist or is not a real number*" << std::endl;
b_miss_params = true;
}
return !b_miss_params;
}
void MapDrawer::DrawMapPoints()
{
if(!mpAtlas)
return;
Map* pActiveMap = mpAtlas->GetCurrentMap();
if(!pActiveMap)
return;
const vector<MapPoint*> &vpMPs = pActiveMap->GetAllMapPoints();
const vector<MapPoint*> &vpRefMPs = pActiveMap->GetReferenceMapPoints();
set<MapPoint*> spRefMPs(vpRefMPs.begin(), vpRefMPs.end());
if(vpMPs.empty())
return;
glPointSize(mPointSize);
glBegin(GL_POINTS);
glColor3f(0.0,0.0,0.0);
for(size_t i=0, iend=vpMPs.size(); i<iend;i++)
{
if(vpMPs[i]->isBad() || spRefMPs.count(vpMPs[i]))
continue;
Eigen::Matrix<float,3,1> pos = vpMPs[i]->GetWorldPos();
glVertex3f(pos(0),pos(1),pos(2));
}
glEnd();
glPointSize(mPointSize);
glBegin(GL_POINTS);
glColor3f(1.0,0.0,0.0);
for(set<MapPoint*>::iterator sit=spRefMPs.begin(), send=spRefMPs.end(); sit!=send; sit++)
{
if((*sit)->isBad())
continue;
Eigen::Matrix<float,3,1> pos = (*sit)->GetWorldPos();
glVertex3f(pos(0),pos(1),pos(2));
}
glEnd();
// ========== 保存地图为 PCD 文件(仅保存一次,稳定后触发) ==========
static bool bSaved = false;
if(!bSaved && spRefMPs.size() > 100)
{
static int lastRefCount = 0;
static int stableCount = 0;
if((int)spRefMPs.size() == lastRefCount)
{
stableCount++;
}
else
{
stableCount = 0;
lastRefCount = spRefMPs.size();
}
if(stableCount >= 5)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
cloud->height = 1;
cloud->is_dense = false;
cloud->points.reserve(vpMPs.size());
for(auto pMP : vpMPs)
{
if(pMP->isBad())
continue;
Eigen::Matrix<float,3,1> pos = pMP->GetWorldPos();
pcl::PointXYZ pt;
pt.x = pos(0);
pt.y = pos(1);
pt.z = pos(2);
cloud->points.push_back(pt);
}
cloud->width = cloud->points.size();
if(!cloud->empty())
{
pcl::io::savePCDFileASCII("map.pcd", *cloud);
std::cout << "[PCD] Saved " << cloud->points.size()
<< " map points to map.pcd (once)" << std::endl;
}
bSaved = true;
}
}
}
void MapDrawer::DrawKeyFrames(const bool bDrawKF, const bool bDrawGraph, const bool bDrawInertialGraph, const bool bDrawOptLba)
{
const float &w = mKeyFrameSize;
const float h = w*0.75;
const float z = w*0.6;
Map* pActiveMap = mpAtlas->GetCurrentMap();
// DEBUG LBA
std::set<long unsigned int> sOptKFs = pActiveMap->msOptKFs;
std::set<long unsigned int> sFixedKFs = pActiveMap->msFixedKFs;
if(!pActiveMap)
return;
const vector<KeyFrame*> vpKFs = pActiveMap->GetAllKeyFrames();
if(bDrawKF)
{
for(size_t i=0; i<vpKFs.size(); i++)
{
KeyFrame* pKF = vpKFs[i];
Eigen::Matrix4f Twc = pKF->GetPoseInverse().matrix();
unsigned int index_color = pKF->mnOriginMapId;
glPushMatrix();
glMultMatrixf((GLfloat*)Twc.data());
if(!pKF->GetParent()) // It is the first KF in the map
{
glLineWidth(mKeyFrameLineWidth*5);
glColor3f(1.0f,0.0f,0.0f);
glBegin(GL_LINES);
}
else
{
//cout << "Child KF: " << vpKFs[i]->mnId << endl;
glLineWidth(mKeyFrameLineWidth);
if (bDrawOptLba) {
if(sOptKFs.find(pKF->mnId) != sOptKFs.end())
{
glColor3f(0.0f,1.0f,0.0f); // Green -> Opt KFs
}
else if(sFixedKFs.find(pKF->mnId) != sFixedKFs.end())
{
glColor3f(1.0f,0.0f,0.0f); // Red -> Fixed KFs
}
else
{
glColor3f(0.0f,0.0f,1.0f); // Basic color
}
}
else
{
glColor3f(0.0f,0.0f,1.0f); // Basic color
}
glBegin(GL_LINES);
}
glVertex3f(0,0,0);
glVertex3f(w,h,z);
glVertex3f(0,0,0);
glVertex3f(w,-h,z);
glVertex3f(0,0,0);
glVertex3f(-w,-h,z);
glVertex3f(0,0,0);
glVertex3f(-w,h,z);
glVertex3f(w,h,z);
glVertex3f(w,-h,z);
glVertex3f(-w,h,z);
glVertex3f(-w,-h,z);
glVertex3f(-w,h,z);
glVertex3f(w,h,z);
glVertex3f(-w,-h,z);
glVertex3f(w,-h,z);
glEnd();
glPopMatrix();
glEnd();
}
}
if(bDrawGraph)
{
glLineWidth(mGraphLineWidth);
glColor4f(0.0f,1.0f,0.0f,0.6f);
glBegin(GL_LINES);
// cout << "-----------------Draw graph-----------------" << endl;
for(size_t i=0; i<vpKFs.size(); i++)
{
// Covisibility Graph
const vector<KeyFrame*> vCovKFs = vpKFs[i]->GetCovisiblesByWeight(100);
Eigen::Vector3f Ow = vpKFs[i]->GetCameraCenter();
if(!vCovKFs.empty())
{
for(vector<KeyFrame*>::const_iterator vit=vCovKFs.begin(), vend=vCovKFs.end(); vit!=vend; vit++)
{
if((*vit)->mnId<vpKFs[i]->mnId)
continue;
Eigen::Vector3f Ow2 = (*vit)->GetCameraCenter();
glVertex3f(Ow(0),Ow(1),Ow(2));
glVertex3f(Ow2(0),Ow2(1),Ow2(2));
}
}
// Spanning tree
KeyFrame* pParent = vpKFs[i]->GetParent();
if(pParent)
{
Eigen::Vector3f Owp = pParent->GetCameraCenter();
glVertex3f(Ow(0),Ow(1),Ow(2));
glVertex3f(Owp(0),Owp(1),Owp(2));
}
// Loops
set<KeyFrame*> sLoopKFs = vpKFs[i]->GetLoopEdges();
for(set<KeyFrame*>::iterator sit=sLoopKFs.begin(), send=sLoopKFs.end(); sit!=send; sit++)
{
if((*sit)->mnId<vpKFs[i]->mnId)
continue;
Eigen::Vector3f Owl = (*sit)->GetCameraCenter();
glVertex3f(Ow(0),Ow(1),Ow(2));
glVertex3f(Owl(0),Owl(1),Owl(2));
}
}
glEnd();
}
if(bDrawInertialGraph && pActiveMap->isImuInitialized())
{
glLineWidth(mGraphLineWidth);
glColor4f(1.0f,0.0f,0.0f,0.6f);
glBegin(GL_LINES);
//Draw inertial links
for(size_t i=0; i<vpKFs.size(); i++)
{
KeyFrame* pKFi = vpKFs[i];
Eigen::Vector3f Ow = pKFi->GetCameraCenter();
KeyFrame* pNext = pKFi->mNextKF;
if(pNext)
{
Eigen::Vector3f Owp = pNext->GetCameraCenter();
glVertex3f(Ow(0),Ow(1),Ow(2));
glVertex3f(Owp(0),Owp(1),Owp(2));
}
}
glEnd();
}
vector<Map*> vpMaps = mpAtlas->GetAllMaps();
if(bDrawKF)
{
for(Map* pMap : vpMaps)
{
if(pMap == pActiveMap)
continue;
vector<KeyFrame*> vpKFs = pMap->GetAllKeyFrames();
for(size_t i=0; i<vpKFs.size(); i++)
{
KeyFrame* pKF = vpKFs[i];
Eigen::Matrix4f Twc = pKF->GetPoseInverse().matrix();
unsigned int index_color = pKF->mnOriginMapId;
glPushMatrix();
glMultMatrixf((GLfloat*)Twc.data());
if(!vpKFs[i]->GetParent()) // It is the first KF in the map
{
glLineWidth(mKeyFrameLineWidth*5);
glColor3f(1.0f,0.0f,0.0f);
glBegin(GL_LINES);
}
else
{
glLineWidth(mKeyFrameLineWidth);
glColor3f(mfFrameColors[index_color][0],mfFrameColors[index_color][1],mfFrameColors[index_color][2]);
glBegin(GL_LINES);
}
glVertex3f(0,0,0);
glVertex3f(w,h,z);
glVertex3f(0,0,0);
glVertex3f(w,-h,z);
glVertex3f(0,0,0);
glVertex3f(-w,-h,z);
glVertex3f(0,0,0);
glVertex3f(-w,h,z);
glVertex3f(w,h,z);
glVertex3f(w,-h,z);
glVertex3f(-w,h,z);
glVertex3f(-w,-h,z);
glVertex3f(-w,h,z);
glVertex3f(w,h,z);
glVertex3f(-w,-h,z);
glVertex3f(w,-h,z);
glEnd();
glPopMatrix();
}
}
}
}
void MapDrawer::DrawCurrentCamera(pangolin::OpenGlMatrix &Twc)
{
const float &w = mCameraSize;
const float h = w*0.75;
const float z = w*0.6;
glPushMatrix();
#ifdef HAVE_GLES
glMultMatrixf(Twc.m);
#else
glMultMatrixd(Twc.m);
#endif
glLineWidth(mCameraLineWidth);
glColor3f(0.0f,1.0f,0.0f);
glBegin(GL_LINES);
glVertex3f(0,0,0);
glVertex3f(w,h,z);
glVertex3f(0,0,0);
glVertex3f(w,-h,z);
glVertex3f(0,0,0);
glVertex3f(-w,-h,z);
glVertex3f(0,0,0);
glVertex3f(-w,h,z);
glVertex3f(w,h,z);
glVertex3f(w,-h,z);
glVertex3f(-w,h,z);
glVertex3f(-w,-h,z);
glVertex3f(-w,h,z);
glVertex3f(w,h,z);
glVertex3f(-w,-h,z);
glVertex3f(w,-h,z);
glEnd();
glPopMatrix();
}
void MapDrawer::SetCurrentCameraPose(const Sophus::SE3f &Tcw)
{
unique_lock<mutex> lock(mMutexCamera);
mCameraPose = Tcw.inverse();
}
void MapDrawer::GetCurrentOpenGLCameraMatrix(pangolin::OpenGlMatrix &M, pangolin::OpenGlMatrix &MOw)
{
Eigen::Matrix4f Twc;
{
unique_lock<mutex> lock(mMutexCamera);
Twc = mCameraPose.matrix();
}
for (int i = 0; i<4; i++) {
M.m[4*i] = Twc(0,i);
M.m[4*i+1] = Twc(1,i);
M.m[4*i+2] = Twc(2,i);
M.m[4*i+3] = Twc(3,i);
}
MOw.SetIdentity();
MOw.m[12] = Twc(0,3);
MOw.m[13] = Twc(1,3);
MOw.m[14] = Twc(2,3);
}
} //namespace ORB_SLAM3. 重新编译ORB_SLAM3
打开终端,依次输入:
bash
cd ~/ORB_SLAM3
bash
rm -rf build lib Thirdparty/DBoW2/build Thirdparty/g2o/build Thirdparty/Sophus/build
bash
./build.sh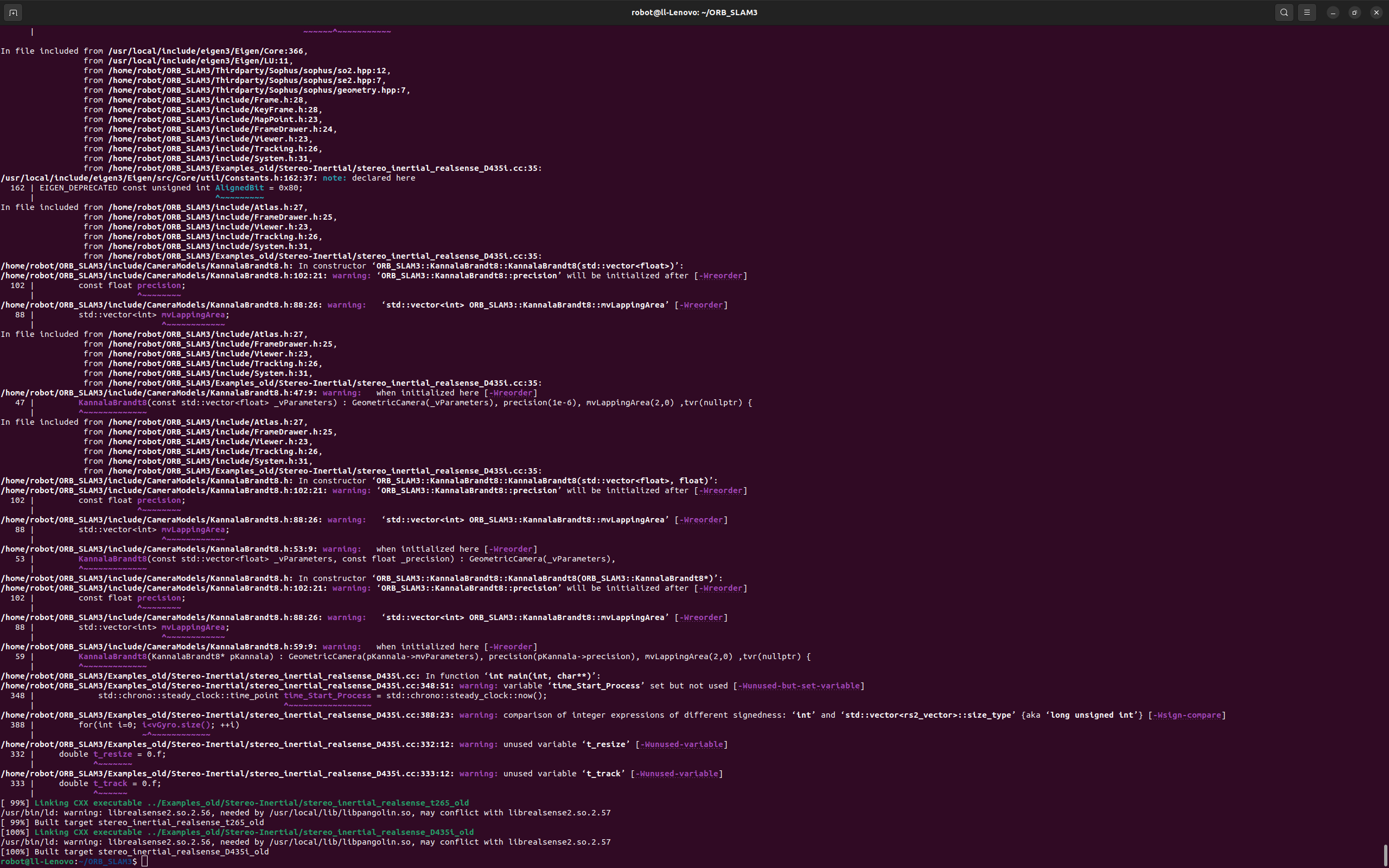
bash
[100%] Built target stereo_inertial_realsense_D435i_old表示编译完成。
4. 重新编译 ROS 2 工作空间
在ROS 2 工作空间目录下,打开终端,输入:
bash
rm -rf build/ install/ log/
bash
colcon build --packages-select orbslam3
三、测试验证
1. 建图
启动相机后,在ORB_SLAM3的ROS2封装包的工作空间下启动建图:
bash
source install/setup.bash
bash
ros2 run orbslam3 rgbd ~/d7lros2/orb_slam3_ws/src/ORB_SLAM3_ROS2/vocabulary/ORBvoc.txt ~/d7lros2/orb_slam3_ws/src/ORB_SLAM3_ROS2/config/rgbd/d435.yaml --ros-args -r /camera/color/image_raw:=/camera/camera/color/image_raw -r /camera/depth/image_rect_raw:=/camera/camera/aligned_depth_to_color/image_raw
bash
robot@ll-Lenovo:~/d7lros2/orb_slam3_ws$ ros2 run orbslam3 rgbd ~/d7lros2/orb_slam3_ws/src/ORB_SLAM3_ROS2/vocabulary/ORBvoc.txt ~/d7lros2/orb_slam3_ws/src/ORB_SLAM3_ROS2/config/rgbd/d435.yaml --ros-args -r /camera/color/image_raw:=/camera/camera/color/image_raw -r /camera/depth/image_rect_raw:=/camera/camera/aligned_depth_to_color/image_raw
ORB-SLAM3 Copyright (C) 2017-2020 Carlos Campos, Richard Elvira, Juan J. Gómez, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
ORB-SLAM2 Copyright (C) 2014-2016 Raúl Mur-Artal, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
This program comes with ABSOLUTELY NO WARRANTY;
This is free software, and you are welcome to redistribute it
under certain conditions. See LICENSE.txt.
Input sensor was set to: RGB-D
Loading ORB Vocabulary. This could take a while...
Vocabulary loaded!
Initialization of Atlas from scratch
Creation of new map with id: 0
Creation of new map with last KF id: 0
Seq. Name:
Camera Parameters:
- Camera: Pinhole
- Image scale: 0.5
- fx: 308.6
- fy: 308.681
- cx: 162.318
- cy: 121.231
- k1: 0
- k2: 0
- p1: 0
- p2: 0
- fps: 30
- color order: RGB (ignored if grayscale)
Depth Threshold (Close/Far Points): 2
ORB Extractor Parameters:
- Number of Features: 1250
- Scale Levels: 8
- Scale Factor: 1.2
- Initial Fast Threshold: 20
- Minimum Fast Threshold: 7
There are 1 cameras in the atlas
Camera 0 is pinhole
============================
ORB-SLAM3 RGB-D node started. Waiting for images...
Starting the Viewer
First KF:0; Map init KF:0
New Map created with 1077 points
[PCD] Saved 1077 map points to map.pcd (once)
移动相机进行建图。建图结束按下 Map Viewer 窗口的 Stop 按钮结束建图,然后Ctrl+C退出程序:
可以看到:
bash
[PCD] Saved 1077 map points to map.pcd (once)
Local Mapping STOP
Relocalized!!
Relocalized!!
Local Mapping RELEASE
Shutdown
Saving trajectory to CameraTrajectory.txt ...
There are 1 maps in the atlas
Map 0 has 116 KFs
End of saving trajectory to CameraTrajectory.txt ...
Saving keyframe trajectory to KeyFrameTrajectory.txt ...地图已经保存为工作空间下的 map.pcd 。
2. 查看地图
在ROS 2 工作空间目录下,打开终端,输入:
bash
pcl_viewer map.pcd 我的结果如下:
bash
robot@ll-Lenovo:~/d7lros2/orb_slam3_ws$ pcl_viewer map.pcd
2026-04-11 15:49:43.018 ( 0.022s) [ F2EC2880] vtkContextDevice2D.cxx:32 WARN| Error: no override found for 'vtkContextDevice2D'.
The viewer window provides interactive commands; for help, press 'h' or 'H' from within the window.
> Loading map.pcd [PCLVisualizer::setUseVbos] Has no effect when OpenGL version is ≥ 2
[done, 208.561 ms : 16262 points]
Available dimensions: x y z
Segmentation fault (core dumped)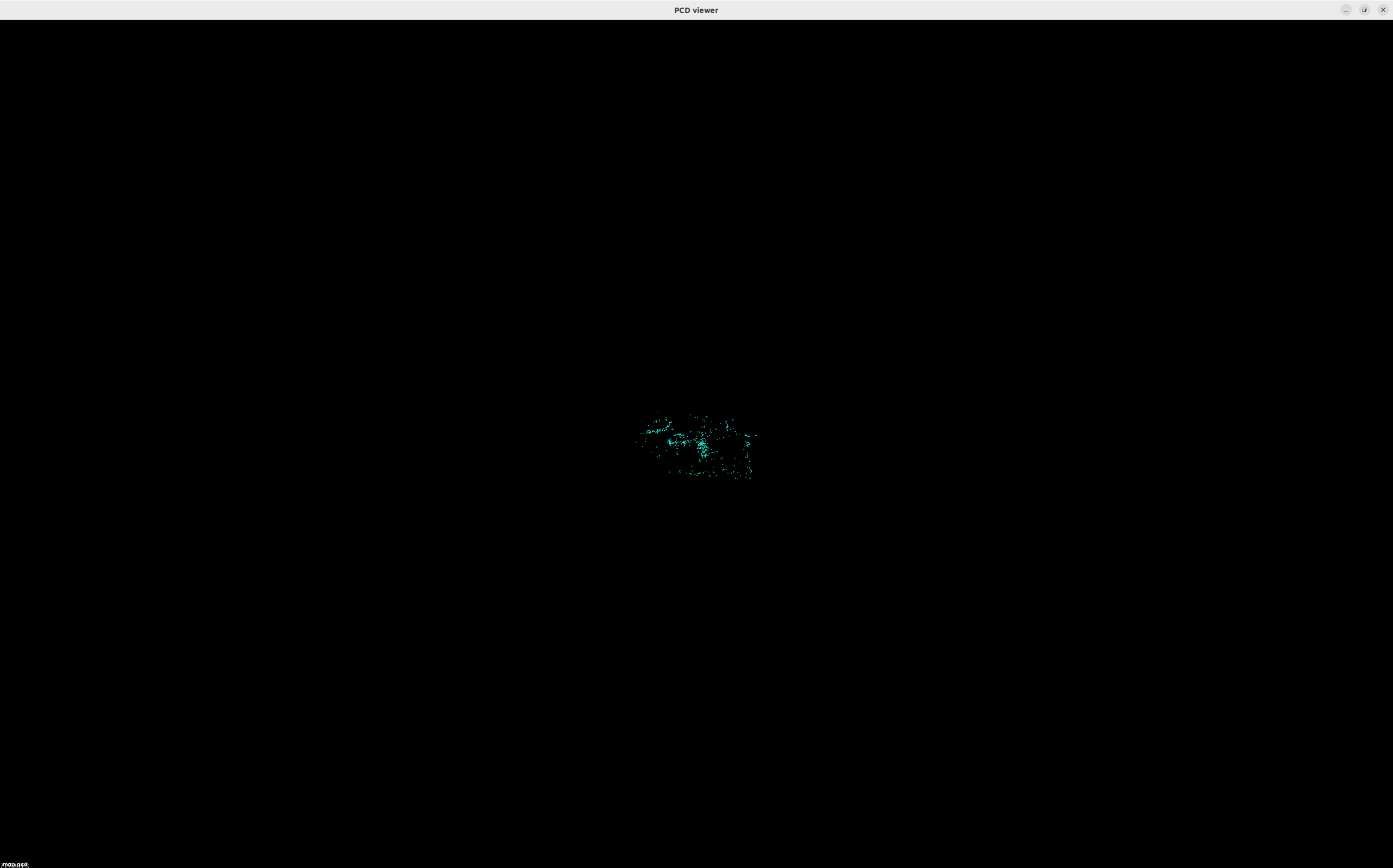
可以进行查看点云地图。