在整车被动安全仿真中,一个被低估却至关重要的环节是:碰撞开始之前,假人究竟坐得对不对?
假人的初始姿态直接影响约束系统载荷路径、气囊展开时序以及损伤预测结果。传统手工摆姿方式耗时长、一致性差、难以批量复现。戴西CAxWorks.VPG(Virtual Proving Ground)车辆工程仿真软件作为业界领先的预处理工程软件,通过几何调整、动态求解、发泡预压和机构自动识别四大技术模块,将这一工作从"玄学"变为可量化、可自动化的工程流程。

PART/ 1
假人几何姿态调整
几何调整是假人入座的第一步,也是整个姿态流程的基础。VPG 提供了完整的多关节联动旋转体系,工程师可在三维环境中直观地操控假人各关节角度,同时系统在后台实时检测各部位与车内结构(座椅、方向盘、仪表板、门板等)之间的穿透情况。
1全空间平移定位
可通过 H 点坐标、参考点选取或拉伸操作调整,支持假人多位置保存与快速切换,高效完成假人空间位置与初始姿态调试。
2多部位灵活调整
调通过鼠标三键或输入角度可精准旋转,自带止停角限制,支持对称 / 反向旋转与一键重置初始姿态。
3多关节联动旋转
调整骨盆倾角时,脊柱、头颈、上肢自动跟随重新定向,保持整体姿态的生物力学一致性。
4实时穿透检测
调整过程中自动检测假人与周边结构的干涉区域,配合自动修正算法调整不合理干涉。
几何调整核心优势
1.兼容 OEM / 供应商假人初始位姿文件直接导入,无需重复建模,缩减前处理工作量;
2.假人躯干、四肢全维度灵活调控,可视化操作界面直观便捷,大幅降低上手门槛;
3.生物力学多关节联动调整,全程保障姿态合理性,完美贴合真实人体运动逻辑;
4.实时检测穿透,有效降低仿真系统误差,全面提升结果可信度与合规性。
PART/ 2
假人动态姿态调整
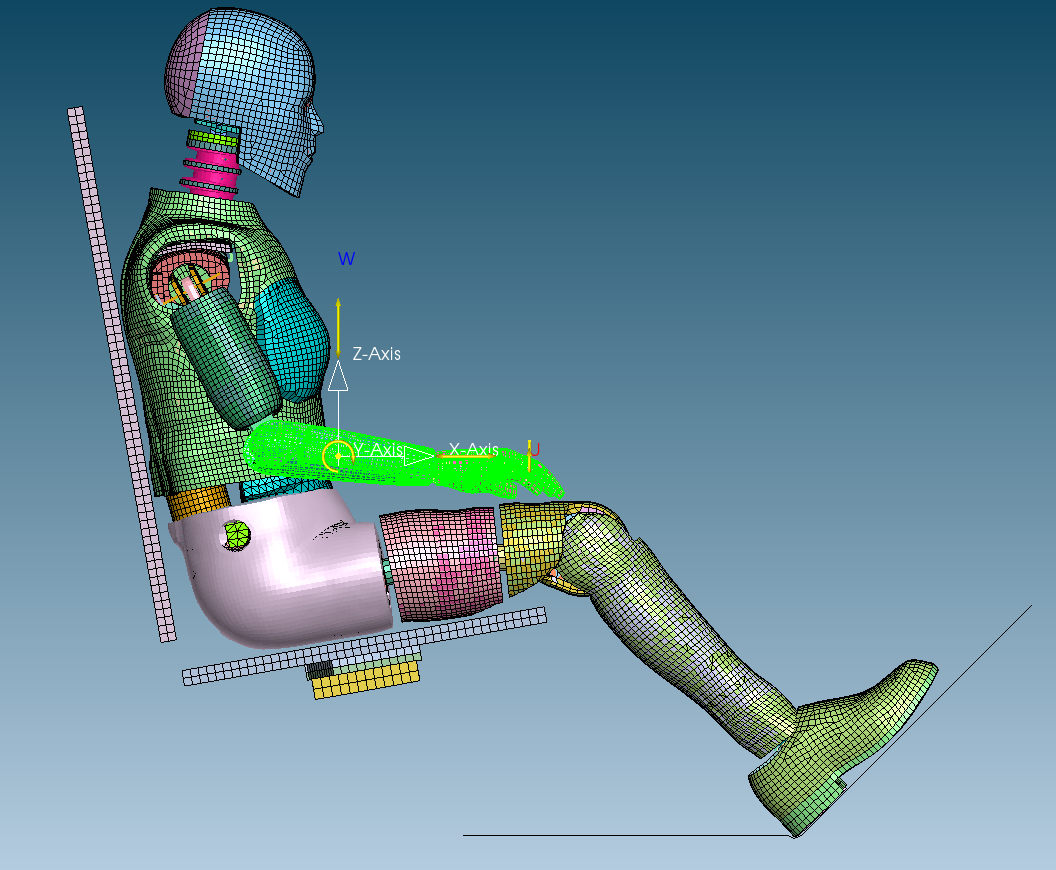
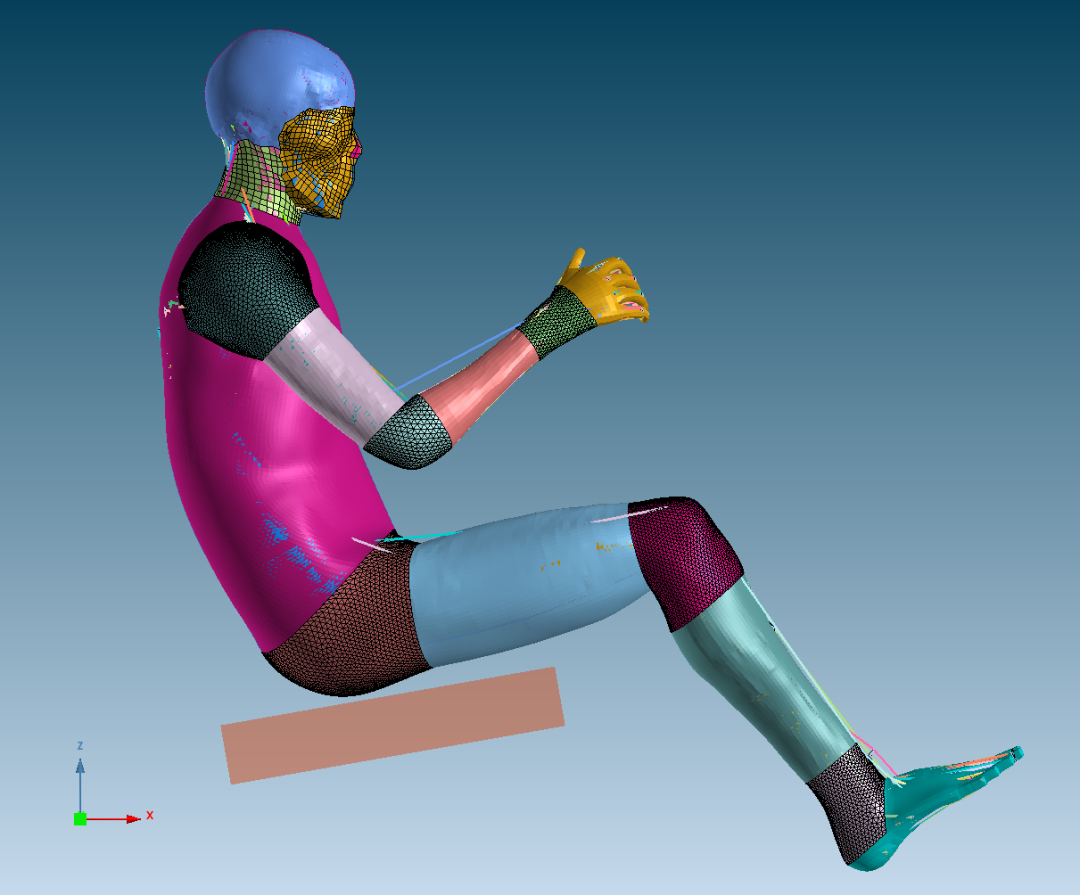
假人部件的位姿调整精度,直接决定仿真前处理效率与最终模型的有效性。几何调整仅可适配系统可识别的假人模型,面对 THUMS 等无身体部件注释信息的假人,单独移动局部部位极易引发单元穿透问题,不仅返工周期长、操作容错率低,更无法保障仿真结果的可靠性。
VPG 作为业界领先的预处理工程软件,依托自研动态调整核心技术,可自由拖拽对应假人部件至目标位姿,经求解器精准计算后自动输出 dynain 文件,一键生成合规可用的最终调整模型,彻底破解特殊假人模型的调整壁垒,将高难度姿态调整转化为标准化、高可控、高效率的工程操作。
"动态求解提供了更高效、便捷的假人姿态调整方法 --- 不同的模型、不同的姿态,都可以求解器计算调整,而非依赖工程师经验。"
动态调整的四步求解流程如下:

可配置时间步长 · 阻尼系数 · 摩擦接触参数
相比传统纯几何调整方式,动态求解的优势十分显著:
PART/ 3
座椅发泡预压处理
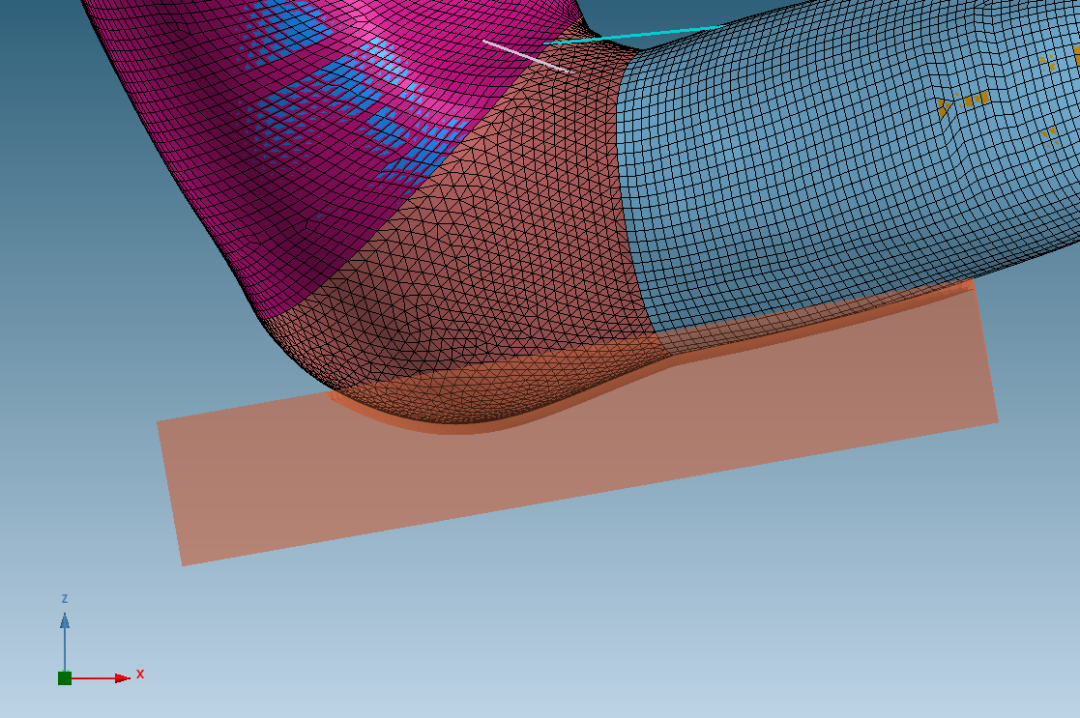
座椅在乘员入座后会产生显著的变形与预压缩,若在碰撞仿真中忽略这一初始状态,座椅中泡沫材料将从未变形状态开始响应,导致接触力和能量吸收特性严重失真。VPG 的发泡预压模块专门解决这一问题。
-
采用"静力抬升 → 重力下压"两阶段算法,精确再现乘员坐下过程中座椅的压缩路径
-
支持 MAT_LOW_DENSITY_FOAM等 LS-DYNA 主流座椅材料模型
-
预压收敛判据可配置:基于体积变化率或节点位移双重标准;
-
预压完成后自动导出包含初始应力场的 stress-initialized 模型;
-
支持多区域独立预压(坐垫区、靠背区分别设置压缩率);
1泡沫网格准备
自动识别座椅发泡部件,提取自由曲面作为接触主面,检查网格质量并修复翻转单元。
2施加目标预压力
根据假人体重(对应百分位)自动计算坐垫/靠背的目标压力分布,施加均布或体重分布载荷。
3静力求解与收敛
隐式静力求解器迭代至收敛,输出节点位移场与初始应力场(d3plot + dynain 格式)。
4写入碰撞主模型
将预压变形后的泡沫几何与初始应力一并写入碰撞仿真模型,保证碰撞零时刻的接触边界准确。
座椅发泡预压对追尾工况(Rear Impact / Whiplash)的仿真精度影响尤为显著:未预压的座椅靠背刚度往往被高估 20%~40%,直接影响头颈部损伤预测结果。
PART/ 4
座椅机构自动识别与调整
现代汽车座椅集成了前后滑道、坐垫升降、靠背倾角、头枕高度等多个自由度的调节机构。在 CAE 模型中,这些机构由数百个零件、铰链、约束和焊接关系构成,手工调整极易破坏结构完整性。
VPG 的座椅机构自动识别模块通过拓扑解析算法,自动理解 CAE 模型中座椅各部件之间的运动学关系,并在完成假人姿态调整后自动驱动对应机构运动至目标状态。
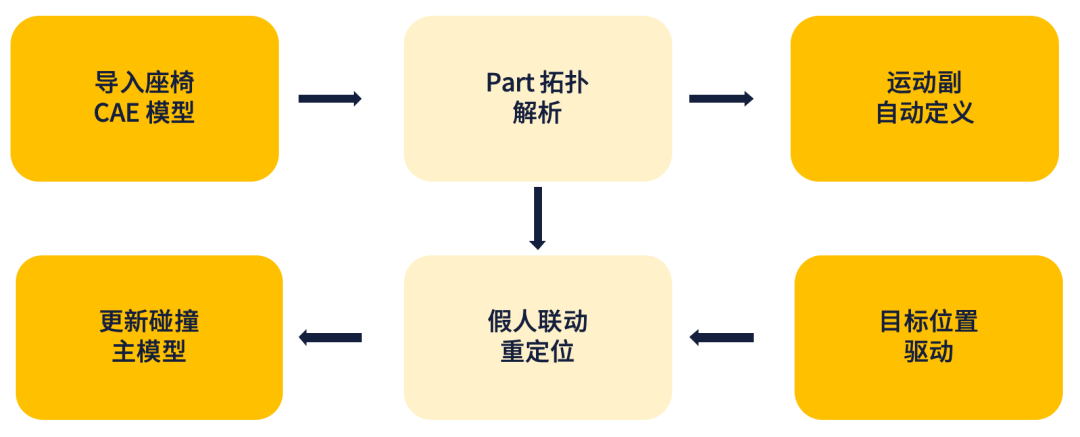
座椅机构自动识别全流程
1Part 拓扑解析
自动识别滑道导轨、铰链节点、焊接连接,构建座椅运动学树形结构,无需手工定义。
2多自由度机构联动
前后位置、坐垫高度、靠背角度、头枕伸出量,一次输入目标参数,全部联动到位。
3假人自动跟随
机构调整后,假人随座椅联动重定位,安全带固定点、织带路径同步更新。
4多工况批量生成
定义参数扫描范围(如前后滑道位置 ±40 mm),自动生成全套独立工况模型文件。
智能机构识别的工程价值
1.彻底消除手工移动零件时的约束错位与节点悬空问题,模型质量大幅提升;
2.与 VPG 假人调整模块深度耦合:机构运动 → 假人跟随 → 安全带重路径 → 预压更新;
3.支持自动识别座椅组件与连接,兼容市面上绝大多数主流座椅 CAE 模型,无需二次开发;
PART/ 5
VPG 的综合工程优势
VPG 并不是一个单点工具,而是覆盖碰撞仿真前处理全链路的工程平台。以下六大维度展示了 VPG 区别于其他工具的核心竞争力:
1多求解器格式支持
原生支持 LS-DYNA、RADIOSS、PAM-CRASH、Abaqus等主流求解器格式,无缝嵌入现有仿真工具链。
2批处理自动化
内置 Python 脚本接口与命令行模式,支持用户定制及批处理自动化。
3全球法规数据库
持续更新覆盖 :GTR-9(2021)、ECE-127(2024)、GB24550、C-NCAP(2018)、C-NCAP(2021)、C-NCAP(2023)、C-NCAP(2024)、C-IASI(2020)、Euro-NCAP8.X、Euro-NCAP9.0、IIHS、J-NCAP 等法规要求,同步全球法规动态。
4全流程闭环集成
几何→动态→预压→机构→输出在单一 GUI 内完成,消除多工具切换导致的数据传递误差。
5可视化质量检查
内置假人姿态报告生成器,自动输出标准化 PDF/PPT 检查报告,满足 OEM 内部及外部审查要求。
6假人模型生态完整
兼容 Humanetics、4a impuls、FTSS 等主流假人有限元模型,支持 THOR、Hybrid III、WorldSID 等全系列。
从"能用"到"精准",
VPG 重新定义了假人入坐的技术高度。
当每一个安全气囊的触发时序、每一条安全带的预紧量都依赖于那个初始姿态时,我们没有理由让它成为仿真链条中最薄弱的一环。
*图中描述是基于产品功能的典型场景,实际操作以工程师实际习惯和需求为准,该文章发布于2026年4月17日。