彻底吃透UV-SLAM:创新原理、工程实现与直线几何核心代码详解
本文深度解析UV-SLAM ------基于VINS-Mono改进的视觉惯性SLAM系统,聚焦消失点(VP)约束+直线特征优化 两大核心创新,附带直线几何公式推导+源码级使用教程,从理论到工程全链路拆解。
前言
VINS-Mono作为经典单目视觉惯性SLAM,依赖点特征在低纹理、结构化场景(室内、走廊、城市街道)中易失效。UV-SLAM 针对性引入直线特征 与消失点几何约束,完美解决这一痛点,同时保留了VINS-Mono的实时性与鲁棒性。
本文将完整梳理UV-SLAM的学术创新、工程设计、核心因子原理 ,并补充前文直线几何工具库的公式推导+代码实现+使用示例,一站式掌握这套顶尖SLAM系统。
一、UV-SLAM 核心总览
UV-SLAM是单目视觉惯性SLAM系统,以VINS-Mono为基线,核心升级点:
- 新增消失点投影因子,利用曼哈顿世界假设(室内/城市环境中存在大量平行直线),强化几何约束;
- 完善直线投影因子,适配低纹理场景;
- 新增直线初始化模块,点特征不足时直线兜底;
- 优化多线程架构、前端特征处理、消息通信机制。
最终实现:结构化环境定位精度大幅提升,低纹理场景鲁棒性碾压原生VINS-Mono。
二、UV-SLAM 三大核心创新点详解
1. 核心创新:VanishingPoint Projection Factor(消失点投影因子)
这是UV-SLAM区别于所有传统直线SLAM的灵魂创新。
原理
曼哈顿世界中,空间平行线投影到图像会汇聚于消失点(VP) ,消失点的3D方向与平行线方向严格平行 。
传统SLAM将直线孤立优化,而VP因子将平行线的结构约束融入因子图优化。
数学定义
cpp
residual = VP_FACTOR × acos(|d_c · vp_3d| / (|d_c| × |vp_3d|))d_c:相机坐标系下直线的方向向量(由Plücker坐标变换得到)vp_3d:图像检测得到的3D消失点方向向量- 残差物理含义:直线方向与消失点方向的夹角,优化目标是让夹角趋近于0
创新价值
打破孤立直线优化的局限,利用环境固有结构约束,室内/城市场景下位姿精度提升显著。
2. 基础创新:Line Projection Factor(直线投影因子)
UV-SLAM的直线观测约束核心,适配Ceres优化器。
核心参数
- 残差维度:2DOF(端点到投影直线的垂直距离,不约束深度)
- 直线参数化:4维正交参数(roll/pitch/yaw/π),无冗余、适合优化
- 设计技巧:对历史位姿雅可比置零,仅约束当前观测帧,避免过约束
鲁棒性设计
直线提取噪声远大于点特征,因此使用CauchyLoss(0.1) 严格抑制异常值。
3. 补充创新:直线驱动的初始化方案
VINS-Mono仅支持点特征初始化,低纹理场景直接失效。
UV-SLAM新增relativePoseForLine()函数:
- 点特征数量不足时,自动切换为直线特征计算相对位姿;
- 大幅提升走廊、白墙、隧道等场景的初始化成功率。
三、UV-SLAM 顶级工程实现设计
学术创新决定上限,工程实现决定落地性,UV-SLAM的工程设计堪称教科书级别。
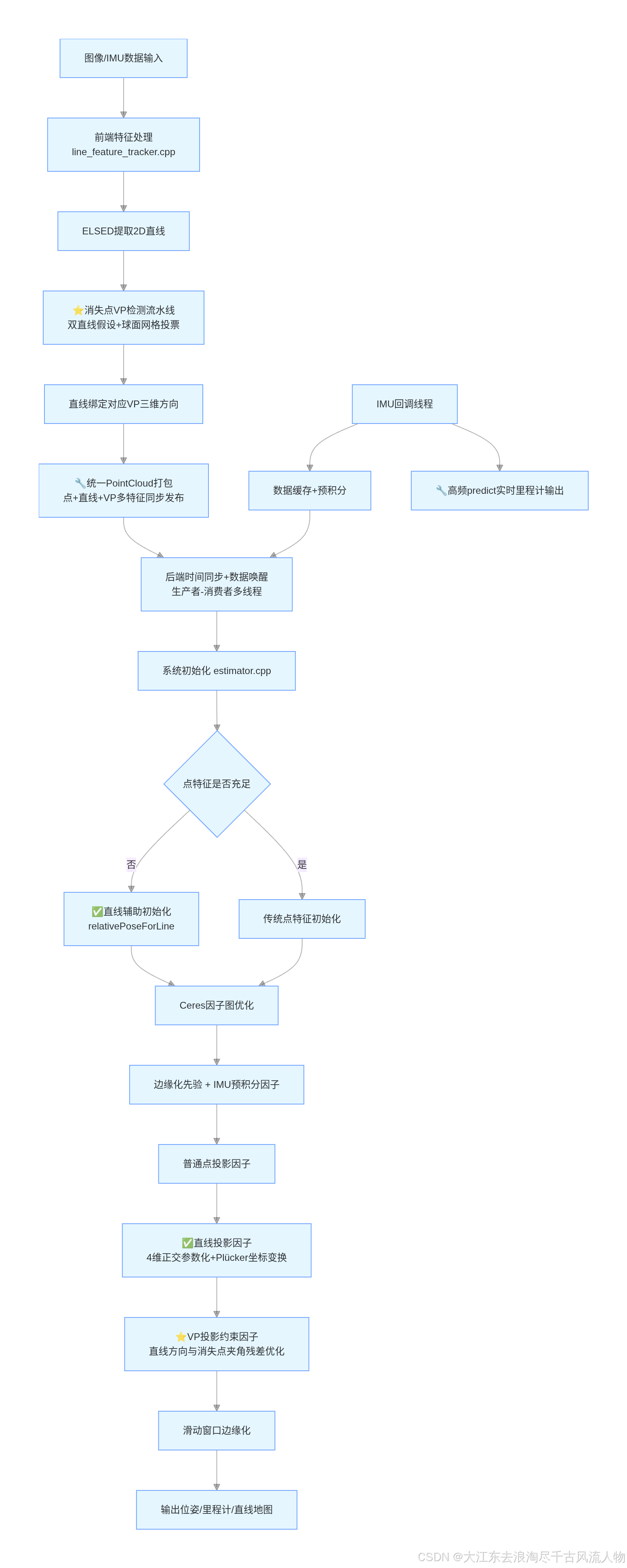
1. 前端:高效消失点(VP)检测流水线
抛弃传统J-linkage算法,采用球面网格投票,速度更快、适配实时SLAM:
readImage4Line() → ELSED线段提取 → 双直线生成VP假设 → 网格投票选最优 → 直线聚类VP结果直接封装在ROS消息中,无需额外通信。
2. 生产者-消费者多线程架构(无阻塞实时性)
完全解耦IMU、特征、优化线程,保证高频里程计不卡顿:
- IMU线程:数据入队+实时预测,高频发布里程计
- 特征线程:数据入队
- 优化线程:条件变量唤醒,时间同步+后端优化
- 4把互斥锁+1个条件变量,线程安全无竞争
3. 标准化因子图优化配置
所有因子按顺序添加,鲁棒核函数精准适配:
| 因子类型 | 鲁棒核函数 | 作用 |
|---|---|---|
| IMU预积分 | 无 | 高频运动约束 |
| 点投影因子 | CauchyLoss(1.0) | 传统视觉约束 |
| 直线投影因子 | CauchyLoss(0.1) | 严格约束直线观测 |
| VP投影因子 | CauchyLoss(1.0) | 结构化几何约束 |
4. 统一ROS消息设计(21通道PointCloud)
单个PointCloud消息承载点特征+直线特征+消失点,减少通信开销,时间同步极简。
5. Header-Only 因子实现
所有Ceres优化因子写在.h头文件中,完美支持自动求导,无链接错误。
四、核心章节:直线几何公式推导 + 代码实现 + 使用教程
这是UV-SLAM直线功能的数学地基 ,也是前文代码的完整解析。
UV-SLAM中所有直线的表示、变换、优化,都依赖这套Plücker坐标+正交参数化工具。
1. 核心数学基础:Plücker 坐标
3D空间直线无法用3个数表示,标准表示为6维Plücker坐标 :
L=(n;v) L = (\boldsymbol{n};\boldsymbol{v}) L=(n;v)
- v∈R3\boldsymbol{v} \in \mathbb{R}^3v∈R3:直线方向向量
- n∈R3\boldsymbol{n} \in \mathbb{R}^3n∈R3:直线法向量
- 约束条件:n⋅v=0\boldsymbol{n} \cdot \boldsymbol{v} = 0n⋅v=0
2. 公式1:正交参数化 ↔ Plücker坐标(优化专用)
推导意义
Plücker坐标6维有冗余,空间直线仅4个自由度,正交参数化(4维) 无约束、完美适配优化。
公式推导
-
Plücker → 正交参数
对n,v\boldsymbol{n},\boldsymbol{v}n,v单位化,构建正交基u1,u2,u3u_1,u_2,u_3u1,u2,u3,通过三角函数将方向编码为4个角度参数,实现降维。
-
正交参数 → Plücker
由3个角度构建旋转矩阵,第4个角度恢复尺度,重构6维Plücker坐标。
源码实现(前文完整代码)
cpp
// 6维Plücker → 4维正交参数(优化用)
Eigen::Vector4d plk_to_orth(Vector6d plk);
// 4维正交参数 → 6维Plücker(计算用)
Vector6d orth_to_plk(Eigen::Vector4d orth);3. 公式2:平面/点 → 直线(观测生成)
公式推导
- 三点确定平面:向量叉乘计算平面法向量,代入平面方程
- 两平面交线:外积运算直接求解Plücker坐标
源码实现
cpp
// 三点 → 平面方程 ax+by+cz+d=0
Eigen::Vector4d pi_from_ppp(Eigen::Vector3d x1, Eigen::Vector3d x2, Eigen::Vector3d x3);
// 两平面交线 → Plücker坐标直线
Vector6d pipi_plk(Eigen::Vector4d pi1, Eigen::Vector4d pi2);4. 公式3:直线坐标系变换(SLAM核心!)
这是UV-SLAM中世界坐标系直线↔相机坐标系直线的核心公式,也是VP因子的基础。
公式推导(刚体变换)
已知相机外参Rcw,tcwR_{cw},t_{cw}Rcw,tcw(世界→相机):
{nc=Rcwnw+tcw×Rcwvwvc=Rcwvw \begin{cases} \boldsymbol{n}c = R{cw}\boldsymbol{n}w + t_{cw}\times R_{cw}\boldsymbol{v}_w \\ \boldsymbol{v}c = R{cw}\boldsymbol{v}w \end{cases} {nc=Rcwnw+tcw×Rcwvwvc=Rcwvw
t×t\timest×:向量的反对称矩阵,用于叉乘运算。
源码实现
cpp
// 世界系直线 → 相机系直线
Vector6d plk_to_pose(Vector6d plk_w, Eigen::Matrix3d Rcw, Eigen::Vector3d tcw);
// 相机系直线 → 世界系直线
Vector6d plk_from_pose(Vector6d plk_c, Eigen::Matrix3d Rcw, Eigen::Vector3d tcw);5. 工具函数
cpp
// 向量反对称矩阵(叉乘专用)
Eigen::Matrix3d skew_symmetric(Eigen::Vector3d v);
// 相机光心到直线的垂足
Eigen::Vector3d plucker_origin(Eigen::Vector3d n, Eigen::Vector3d v);6. UV-SLAM 中实战使用示例
示例1:直线观测生成(两平面求交线)
cpp
// 输入两个平面
Eigen::Vector4d plane1 = Eigen::Vector4d(1,0,0,-1);
Eigen::Vector4d plane2 = Eigen::Vector4d(0,1,0,-2);
// 计算交线(Plücker坐标)
grslam::Vector6d line_plk = grslam::pipi_plk(plane1, plane2);示例2:直线坐标系变换(VP因子必备)
cpp
// 相机外参(世界→相机)
Eigen::Matrix3d Rcw;
Eigen::Vector3d tcw;
// 世界坐标系直线
grslam::Vector6d line_w;
// 转换为相机坐标系直线(用于计算VP残差)
grslam::Vector6d line_c = grslam::plk_to_pose(line_w, Rcw, tcw);示例3:优化参数转换
cpp
// 6维Plücker直线 → 4维优化参数
grslam::Vector6d line_plk;
Eigen::Vector4d opt_param = grslam::plk_to_orth(line_plk);
// 优化后转换回Plücker坐标
grslam::Vector6d line_new = grslam::orth_to_plk(opt_param);五、UV-SLAM 总结
学术创新
- VP投影因子:首次将曼哈顿世界的平行结构约束融入直线SLAM优化;
- 直线投影因子:轻量化2DOF残差,无深度约束,适配单目SLAM;
- 直线初始化:低纹理场景兜底,突破VINS-Mono限制。
工程创新
- 生产者-消费者多线程架构,无阻塞实时性;
- 高效VP检测流水线,适配嵌入式平台;
- 统一消息通信+Header-Only因子设计,工业级鲁棒性。
核心价值
UV-SLAM完美解决了VINS-Mono在结构化、低纹理场景的失效问题,同时保留了实时性与易用性,是室内机器人、AR/VR、自动驾驶的绝佳选择。
结语
本文从创新原理、工程设计、数学公式、源码实现四个维度,完整拆解了UV-SLAM的核心技术。直线特征+消失点约束是未来视觉SLAM的重要方向,吃透这套代码与理论,足以应对绝大多数结构化场景的定位需求。