面阵相机 vs 线阵相机:堡盟与海康相机选型差异全解析 附C# 实战演示
- [面阵 vs 线阵:工业视觉的"广角镜"与"扫描仪"](#面阵 vs 线阵:工业视觉的“广角镜”与“扫描仪”)
-
- [🔍 核心差异:一帧 vs 一行](#🔍 核心差异:一帧 vs 一行)
-
- [面阵相机 (Area Scan):瞬间的"广角镜"](#面阵相机 (Area Scan):瞬间的“广角镜”)
- [线阵相机 (Line Scan):连续的"扫描仪"](#线阵相机 (Line Scan):连续的“扫描仪”)
- [⚔️ 优缺点深度对比](#⚔️ 优缺点深度对比)
- [🛠️ C# 实战:代码层面的区别](# 实战:代码层面的区别)
-
- 环境准备
- [示例 1:堡盟面阵相机 (Baumer) - "抓拍"](#示例 1:堡盟面阵相机 (Baumer) - “抓拍”)
- [示例 2:海康线阵相机 (Line Scan) - "扫描"](#示例 2:海康线阵相机 (Line Scan) - “扫描”)
- [⚠️ 踩坑指南与注意事项](#⚠️ 踩坑指南与注意事项)
-
- [1. 线阵相机的"行频同步"陷阱](#1. 线阵相机的“行频同步”陷阱)
- 2. 堡盟 neoAPI 的内存管理 (C#))
- [3. 海康 SDK 的多线程安全](#3. 海康 SDK 的多线程安全)
- [4. 内存与算力消耗](#4. 内存与算力消耗)
- [✅ 总结](#✅ 总结)
面阵 vs 线阵:工业视觉的"广角镜"与"扫描仪"
------ 深度解析堡盟面阵与海康线阵选型差异(附 C# 实战代码)
在机器视觉项目中,选型的第一步往往就是决定:用面阵相机(Area Scan)还是线阵相机(Line Scan)?
目前国内市场呈现双寡头态势:**堡盟(Baumer)凭借其简洁的 neoAPI 在高端面阵及跨平台开发领域备受青睐,而海康机器人(Hikrobot)**则在安防及工业检测领域拥有庞大的用户群。很多新手工程师容易混淆两者,导致项目后期出现带宽瓶颈或成像模糊。
本文将以**堡盟(Baumper)面阵相机(使用 neoAPI)和海康机器人(Hikrobot)线阵相机(使用 MVS SDK)**为例,从物理原理到 C# 代码实现,彻底讲透两者的区别与优缺点。
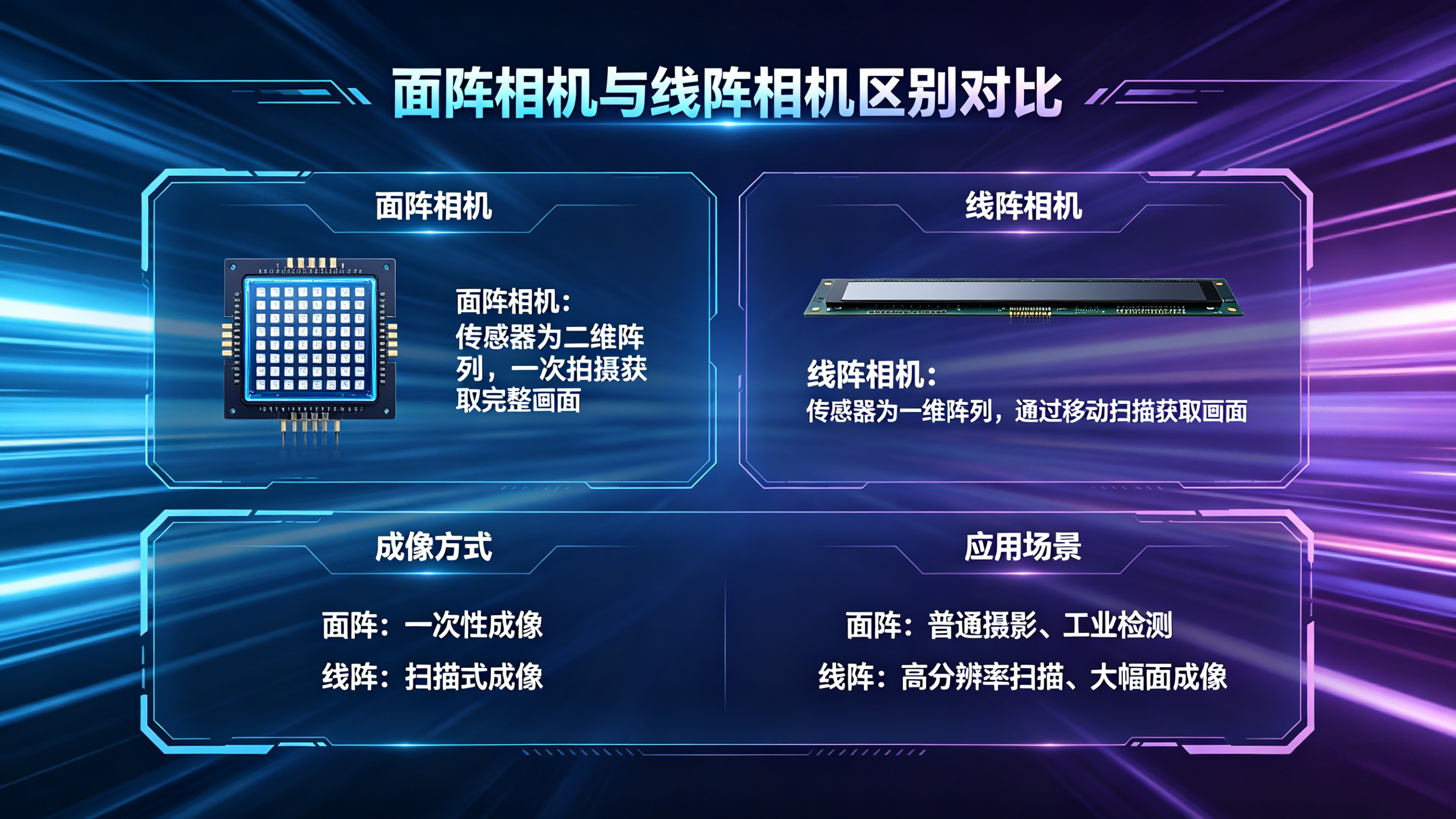
🔍 核心差异:一帧 vs 一行
面阵相机 (Area Scan):瞬间的"广角镜"
就像我们平时用的手机摄像头,面阵相机一次曝光捕捉一整张二维图像。
- 代表选手:堡盟 CX/CXG 系列
- 工作方式 :传感器一次性读取所有像素,形成 W i d t h × H e i g h t Width \times Height Width×Height 的矩阵图像。
线阵相机 (Line Scan):连续的"扫描仪"
线阵相机每次曝光只捕捉一行像素 ( N × 1 N \times 1 N×1)。
- 代表选手:海康 MV-CL 系列
- 工作方式 :必须配合物体的高速运动,不断采集"一行",然后在软件中将成千上万行"拼"成一张完整的二维图像。
⚔️ 优缺点深度对比
| 维度 | 面阵相机 (如 堡盟 Baumer) | 线阵相机 (如 海康 Hikrobot) |
|---|---|---|
| 成像原理 | 快照式,静态/动态皆可 | 扫描式,必须物体运动 |
| 分辨率 | 常见 2K, 4K (受限于读出速度) | 轻松实现 8K, 16K 甚至 32K 超高分辨率 |
| 帧率/行频 | 受限于全图读出时间 (通常 10-100fps) | 极高 (可达 100kHz 行频),适合高速产线 |
| 数据带宽 | 瞬时爆发高,需大缓存 | 带宽恒定,对传输压力较小 |
| 适用场景 | 电子元件检测、物流分拣、尺寸测量 | 印刷检测、金属/薄膜表面检测、高速飞拍 |
| SDK 特点 | neoAPI 极简,C++/C# 封装优雅 | MVS SDK 功能全,文档中文友好,支持多语言 |
💡 选型金句:
- 需要抓拍瞬间 、物体不规则运动 → \rightarrow → 选 面阵(堡盟)。
- 需要极高精度 、物体匀速连续运动 → \rightarrow → 选 线阵(海康)。
🛠️ C# 实战:代码层面的区别
代码是硬件逻辑的直接映射。下面的代码示例将展示为什么线阵相机必须依赖"运动"和"拼接"。
环境准备
- 面阵库 :
Baumer.NeoAPI(NuGet 包安装) - 线阵库 :
MvCamCtrl.NET(海康 MVS 安装目录下的 DLL) - 通用库 :
OpenCvSharp(用于显示)
示例 1:堡盟面阵相机 (Baumer) - "抓拍"
面阵相机的逻辑非常简单:初始化 -> 连接 -> 抓一帧 -> 处理。
csharp
using Baumer.NeoAPI;
using OpenCvSharp;
using System;
class BaumerAreaScanDemo
{
static void Main(string[] args)
{
try
{
// 1. 连接相机 (neoAPI 极其简洁)
// 直接 Connect 默认连接第一台相机
var camera = new Camera();
camera.Connect();
Console.WriteLine("堡盟面阵相机:开始采集...");
// 2. 设置采集模式 (自由运行)
camera.SetFeature("TriggerMode", "Off");
camera.StreamStart();
// 3. 获取单帧图像
// GetImage 是阻塞式的,直接返回 Image 对象
var image = camera.GetImage(1000); // 超时 1000ms
// 4. 转换为 OpenCV Mat
// neoAPI 的 Buffer 是 IntPtr,需要拷贝
var width = (int)image.Width();
var height = (int)image.Height();
var mat = new Mat(height, width, MatType.CV_8UC1);
// Copy data from NeoAPI buffer to Mat
System.Runtime.InteropServices.Marshal.Copy(
image.Buffer(),
new byte[width * height],
0,
width * height);
// 实际项目中需使用 mat.DataPointer 或 unsafe 代码高效拷贝
// 这里简化演示逻辑
// 5. 显示
Cv2.ImShow("Baumer Area Scan", mat);
Cv2.WaitKey(0);
camera.StreamStop();
camera.Disconnect();
}
catch (NeoException exc)
{
Console.WriteLine($"Error: {exc.Message}");
}
}
}代码解读 :
GetImage()直接返回了一个完整的二维矩阵,无需拼接。这是典型的"所见即所得"。
示例 2:海康线阵相机 (Line Scan) - "扫描"
线阵相机的逻辑是:开启流 -> 循环采集单行 -> 拼接成图 -> 处理 。
(注:海康 MVS 的 C# 接口基于事件回调,线阵采集必须使用回调模式)
csharp
using MvCamCtrl.NET;
using OpenCvSharp;
using System;
using System.Runtime.InteropServices;
using System.Threading;
class HikrobotLineScanDemo
{
// 全局变量用于拼接图像
private static Mat stitchedMat = null;
private static int currentRow = 0;
private static readonly int MAX_HEIGHT = 2000; // 预设扫描高度
private static bool isGrabbing = false;
// 1. 定义回调函数
private static void ImageCallback(
uint nOriginWidth, uint nOriginHeight, uint nWidth, uint nHeight,
IntPtr pData, IntPtr pUser)
{
try
{
// 2. 核心差异:线阵图像的高度通常为 1 (nHeight == 1)
if (nHeight != 1) return;
// 3. 数据处理
// 将 IntPtr 数据转换为 byte[],然后拷贝到大图的指定行
byte[] rowBytes = new byte[nWidth];
Marshal.Copy(pData, rowBytes, 0, (int)nWidth);
// 4. 拼接逻辑
if (currentRow < MAX_HEIGHT)
{
var rowSpan = stitchedMat.Row(currentRow);
rowSpan.SetArray(rowBytes);
currentRow++;
Console.WriteLine($"扫描进度: {currentRow}/{MAX_HEIGHT}");
}
// 5. 检查完成
if (currentRow >= MAX_HEIGHT && isGrabbing)
{
Console.WriteLine("扫描完成!显示图像...");
Cv2.ImShow("Hikrobot Line Scan", stitchedMat);
Cv2.WaitKey(1); // 非阻塞刷新
}
}
catch (Exception ex)
{
Console.WriteLine($"Callback Error: {ex.Message}");
}
}
static void Main(string[] args)
{
// 初始化 OpenCV
Cv2.NamedWindow("Hikrobot Line Scan", WindowMode.AutoSize);
MyCamera camera = new MyCamera();
MyCamera.MV_CC_DEVICE_INFO_LIST deviceList = new MyCamera.MV_CC_DEVICE_INFO_LIST();
// 1. 枚举设备
int nRet = MyCamera.MV_CC_EnumDevices(MyCamera.MV_GIGE_DEVICE, ref deviceList);
if (deviceList.nDeviceNum == 0)
{
Console.WriteLine("未找到相机");
return;
}
// 2. 打开设备
nRet = camera.MV_CC_CreateDevice(ref deviceList.pDeviceInfo[0]);
nRet = camera.MV_CC_OpenDevice();
if (nRet != MyCamera.MV_OK)
{
Console.WriteLine("打开相机失败");
return;
}
// 3. 配置线阵参数
// 设置为连续采集
camera.MV_CC_SetEnumValue("AcquisitionMode", 2); // 2=Continuous
// 设置行频 (Line Rate)
camera.MV_CC_SetFloatValue("AcquisitionLineRate", 10000.0f); // 10kHz
// 获取图像宽度用于初始化缓冲区
uint width = 0;
camera.MV_CC_GetIntValue("Width", ref width);
Console.WriteLine($"相机宽度: {width}");
// 初始化拼接图像缓冲区
stitchedMat = new Mat(MAX_HEIGHT, (int)width, MatType.CV_8UC1, Scalar.Black);
// 4. 注册回调并开始采集
MyCamera.cbOutputExdelegate callback = ImageCallback;
camera.MV_CC_RegisterImageCallBackEx(callback, IntPtr.Zero);
Console.WriteLine("海康线阵相机:开始扫描... (按任意键停止)");
isGrabbing = true;
camera.MV_CC_StartGrabbing();
// 保持运行
Console.ReadKey();
isGrabbing = false;
camera.MV_CC_StopGrabbing();
camera.MV_CC_CloseDevice();
Cv2.DestroyAllWindows();
}
}代码解读:
AcquisitionLineRate:线阵相机的核心参数,必须与传送带速度严格同步。ImageCallback:海康 SDK 必须使用回调模式处理图像,因为线阵数据是流式的。stitchedMat:代码中手动维护stitchedMat,在回调函数中不断将单行数据塞进去。nHeight == 1:注意回调函数参数中的高度,对于线阵相机,这个值通常恒为 1。
⚠️ 踩坑指南与注意事项
1. 线阵相机的"行频同步"陷阱
线阵相机最怕行频与物体速度不匹配。
- 行频太快:图像被"压缩",出现挤压变形。
- 行频太慢:图像被"拉伸",出现黑线或撕裂。
解决方案 :海康相机通常支持 编码器模式(Encoder Mode),利用光电编码器反馈的脉冲来触发相机采集,实现硬件级同步。
2. 堡盟 neoAPI 的内存管理 (C#)
在 C# 中使用 neoAPI 时,Image.Buffer() 返回的是指针。如果需要在 GetImage 作用域外使用数据,必须进行深拷贝(Deep Copy),否则指针可能失效或被 GC 回收。
3. 海康 SDK 的多线程安全
- 回调线程 :海康的
ImageCallback是在 SDK 内部线程中调用的,严禁 在回调中直接进行耗时的 UI 更新或复杂的图像处理(如Cv2.ImShow)。 - 建议:在回调中仅进行数据拷贝(入队列),由主线程定时处理显示。
4. 内存与算力消耗
- 线阵相机在软件端需要预分配巨大的内存来存储拼接图像(Stitching Buffer),且拼接过程消耗 CPU。
- 面阵相机虽然单帧数据量大,但处理逻辑简单,适合直接接入深度学习推理框架。
✅ 总结
面阵相机(堡盟 neoAPI)是"稳" :API 极简,开发效率高,适合绝大多数标准检测场景。
线阵相机(海康 MVS)是"精":依托国产完善的生态和高性价比,适合高速、高分辨率的表面质量检测。
你的项目,是需要"抓拍"还是"扫描"?