目录

1.摘要
针对无人机在复杂山区执行巡逻任务时面临的任务分配与安全避障难题,本文提出了一种基于双种群进化的协同优化算法(DECOA),旨在实现多机协同巡逻任务的全局寻优。针对任务分配与路径规划的异构特性,本文设计了两种不同的粒子编码方案,将求解空间高效映射为算法可处理的粒子形态。为突破传统演化算法在复杂空间中的寻优瓶颈,DECOA引入动态双种群搜索策略以平衡种群的探索与开发能力,并结合自适应协同机制进一步强化算法在优势区域的全局搜索性能。
2.无人机任务巡逻模型
无人机任务分配
无人机任务分配模型在多山环境中为多机系统规划最优任务执行序列,假设系统包含 N U A V N_{UAV} NUAV架无人机与 N t a s k N_{task} Ntask个任务点,其优化目标为最小化系统总飞行距离 f a : f_a: fa:
f a = ∑ i = 1 N U A V ∑ j = 1 N t a s k + 1 D i j f_a=\sum_{i=1}^{N_{UAV}}\sum_{j=1}^{N_{task}+1}D_{ij} fa=i=1∑NUAVj=1∑Ntask+1Dij
为了确保求解的可行性,避免出现任务漏访或无人机闲置等无效分配状态(基于布尔决策变量 X i j X_{ij} Xij), 模型引入了惩罚项 f p f_p fp。当检测到违反分配约束的不可行解时,系统将施加惩罚值 V p V_{p} Vp,从而在演化寻优过程中对其进行淘汰:
f p = { V p , if ∑ i = 1 N U A V ∑ j = 1 N t a s k X i j < N t a s k or ∑ j = 1 N t a s k X i j = 0 0 , otherwise f_p = \begin{cases} V_p, & \text{if } \sum_{i=1}^{N_{UAV}} \sum_{j=1}^{N_{task}} X_{ij} < N_{task} \text{ or } \sum_{j=1}^{N_{task}} X_{ij} = 0 \\ 0, & \text{otherwise} \end{cases} fp={Vp,0,if ∑i=1NUAV∑j=1NtaskXij<Ntask or ∑j=1NtaskXij=0otherwise
任务分配目标函数定义为总飞行距离与惩罚项之和:
min F 1 = f a + f p \min F_1=f_a+f_p minF1=fa+fp
无人机路径规划
目标函数为:
min F 2 = ω 1 ⋅ f 1 + ω 2 ⋅ f 2 + ω 3 ⋅ f 3 \min F_2=\omega_1\cdot f_1+\omega_2\cdot f_2+\omega_3\cdot f_3 minF2=ω1⋅f1+ω2⋅f2+ω3⋅f3
其中, f 1 f_{1} f1为航迹长度代价。为控制总能耗并保证航迹平滑度,结合了所有航迹段的平均长度与最大段长 d l m a x dl_\mathrm{max} dlmax 惩罚机制,以避免生成过长单调航线:
f 1 = β ⋅ ∑ i = 1 D + 1 d l i − 1 , i D + 1 + ( 1 − β ) ⋅ d l max f_1=\beta\cdot\frac{\sum_{i=1}^{D+1}dl_{i-1,i}}{D+1}+(1-\beta)\cdot dl_{\max} f1=β⋅D+1∑i=1D+1dli−1,i+(1−β)⋅dlmax
f 2 f_2 f2为飞行安全代价,由禁飞区穿越惩罚 f r f_r fr与地形碰撞惩罚 f m f_m fm组成。通过在航迹段间引入均匀插值点,并利用高斯函数对山峰地形特征进行三维曲面建模,模型能够精准计算航迹与危险区域的安全裕度:
f 2 = f r + f m f_2=f_r+f_m f2=fr+fm
针对无人机受限机动能力,模型引入约束代价函数 f 3 f_{3} f3。当航迹节点的偏航角 θ t u r m \theta^\mathrm{turm} θturm或爬升角 θ c l i m b \theta^\mathrm{climb} θclimb突破最大物理极值 ( θ max _ t u r n \theta_{\max\turn} θmax_turn与 θ max _ c l i m b \theta{\max\_climb} θmax_climb)时,系统将通过指示函数 I ( ⋅ ) I(\cdot) I(⋅)触发高额常数惩罚 V p V_p Vp,从而在演化寻优空间中有效削减此类高风险不可行解的被选中概率
f 3 = ∑ i = 1 D ( V p ⋅ I ( θ i t u r n > θ max t u r n ) + V p ⋅ I ( θ i c l i m b > θ max d i m b ) ) f_3=\sum_{i=1}^D\left(V_p\cdot I(\theta_i^\mathrm{turn}>\theta_{\max_turn})+V_p\cdot I(\theta_i^\mathrm{climb}>\theta_{\max_dimb})\right) f3=i=1∑D(Vp⋅I(θiturn>θmaxturn)+Vp⋅I(θiclimb>θmaxdimb))
3.基于双种群进化协同优化算法(DECOA)
编解码方案
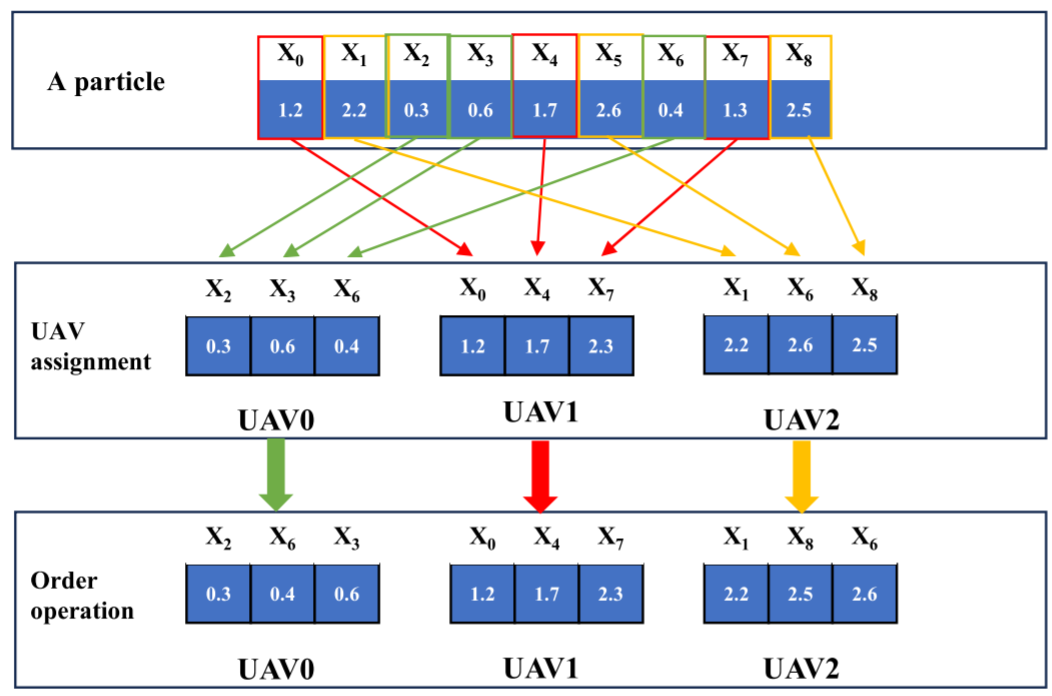
针对任务分配,本文采用实数向量编码策略,数值整数部分划分无人机归属,相对大小(小数部分)决定任务执行时序。
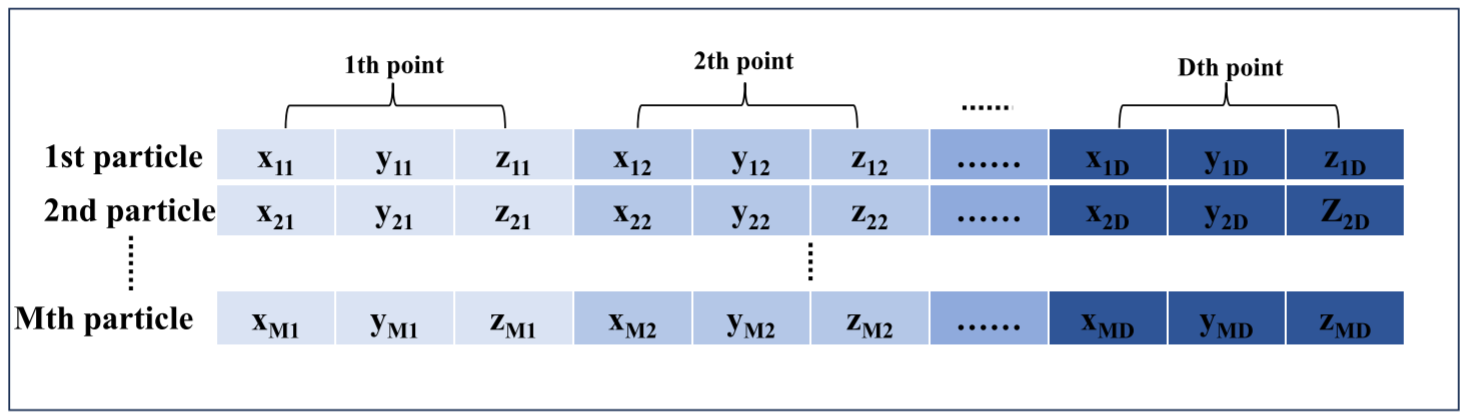
针对三维航迹规划,粒子直接由航迹节点的空间三维坐标 ( x , y , z ) (x,y,z) (x,y,z)序列构成,算法依托动态主副双种群交替演化框架,主种群主导局部开发更新,副种群则依概率协同逼近个体或全局最优解。
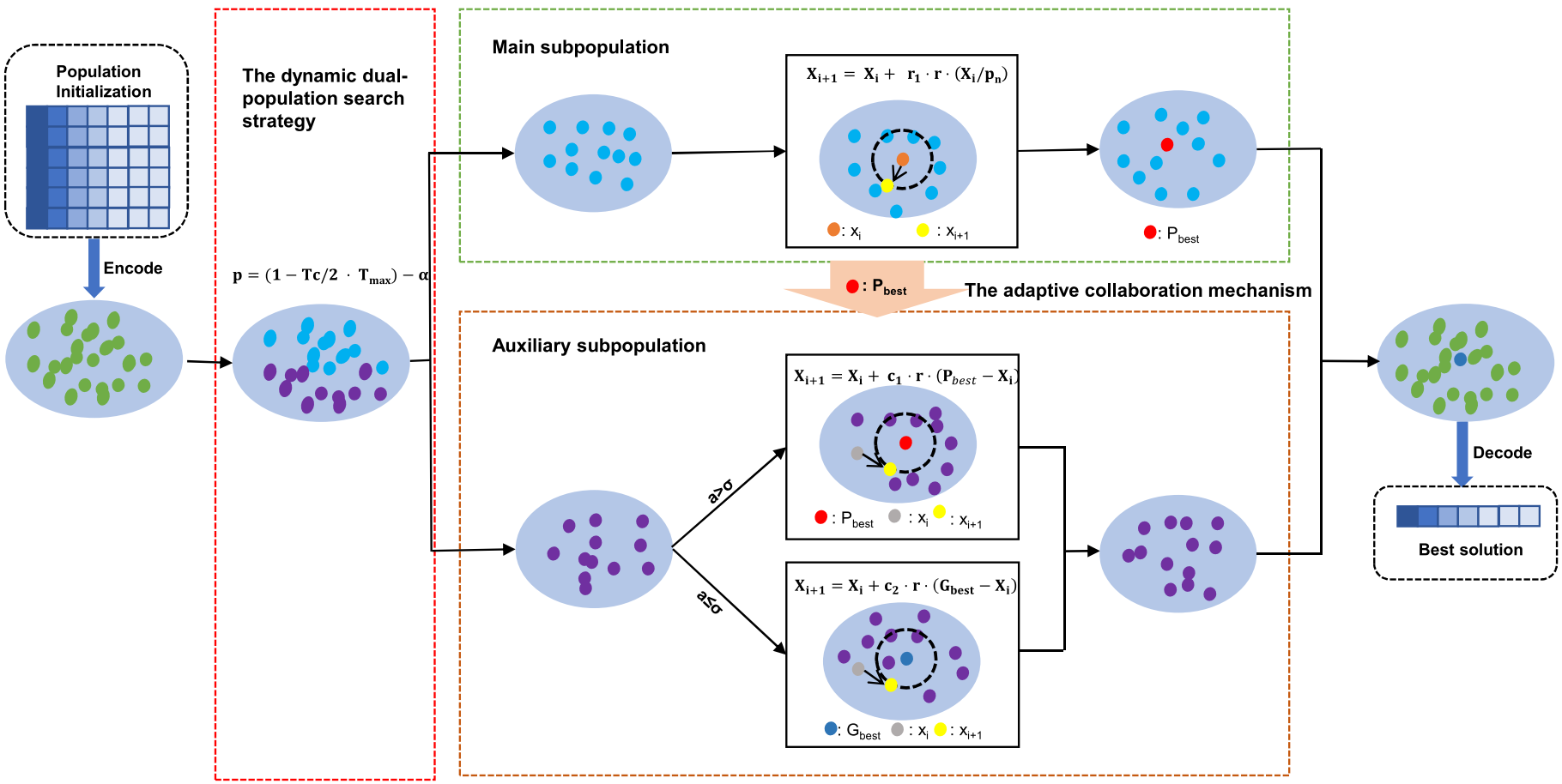
动态双种群搜索策略
为平衡全局探索与局部开发能力,DECOA引入了动态双种群搜索策略。主种群规模比例 p p p 随当前迭代次数 T c T_c Tc 动态递增,并引入随机扰动因子 α \alpha α 以维持种群多样性:
p = T c / ( 2 ⋅ T max ) + α p = T_c / (2 \cdot T_{\max}) + \alpha p=Tc/(2⋅Tmax)+α
主种群侧重于全局搜索以避免陷入局部最优,其位置更新机制引入了基于粒子维度 p n pn pn 的自适应缩放策略:
X i + 1 = X i + r 1 ⋅ r ⋅ X i p n X_{i+1} = X_i + r_1 \cdot r \cdot \frac{X_i}{pn} Xi+1=Xi+r1⋅r⋅pnXi
副种群则聚焦于优势区域的局部开发以加速收敛,通过概率阈值 σ \sigma σ 引导粒子自适应地向主种群最优解 P b e s t P_{best} Pbest 或全局最优解 G b e s t G_{best} Gbest 近似:
X i + 1 = X i + { c 1 ⋅ r ⋅ ( P b e s t − X i ) , if a > σ c 2 ⋅ r ⋅ ( G b e s t − X i ) , if a ≤ σ X_{i+1} = X_i + \begin{cases} c_1 \cdot r \cdot (P_{best} - X_i), & \text{if } a > \sigma \\ c_2 \cdot r \cdot (G_{best} - X_i), & \text{if } a \leq \sigma \end{cases} Xi+1=Xi+{c1⋅r⋅(Pbest−Xi),c2⋅r⋅(Gbest−Xi),if a>σif a≤σ
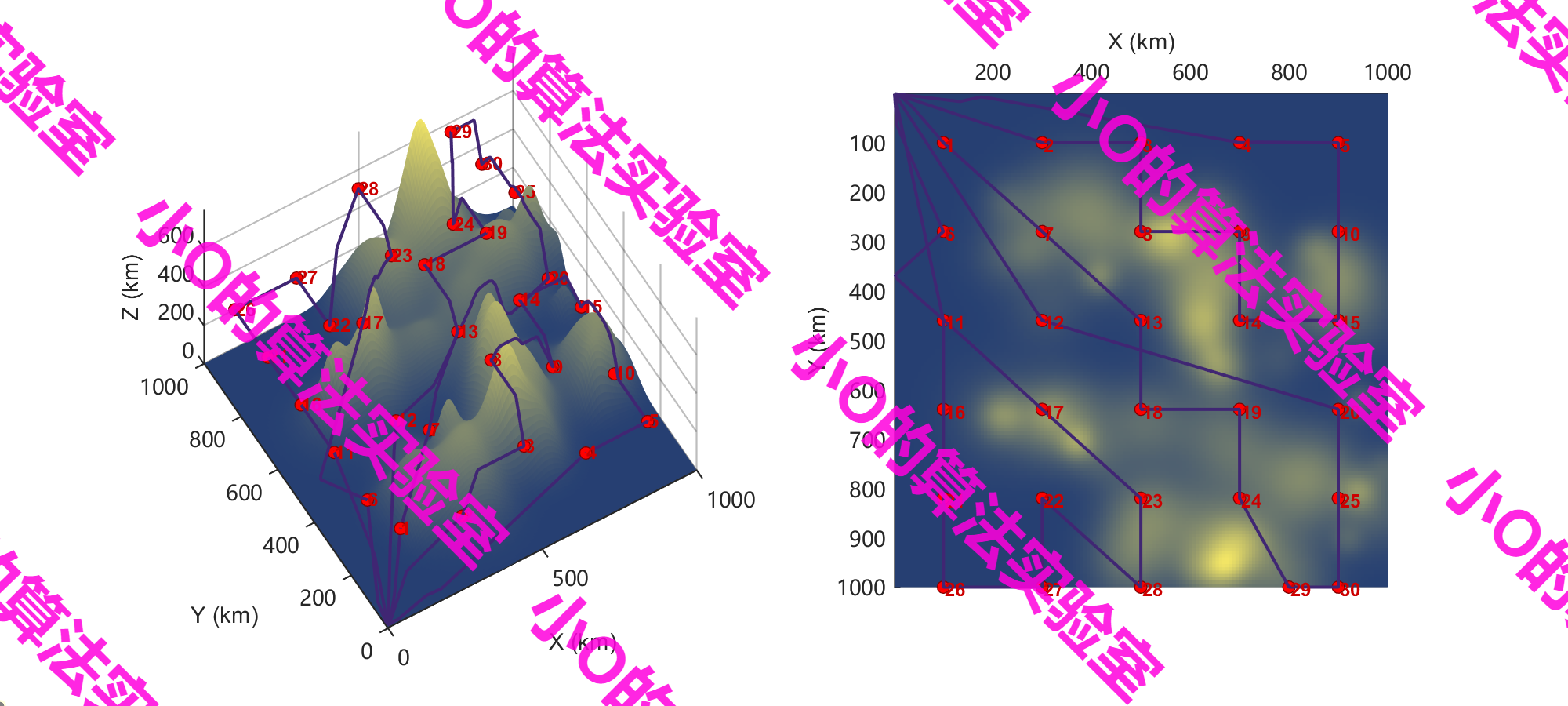
4.结果展示
5.参考文献
Wang, Yunhe, et al. "Dual-Population Evolution-Based Collaborative Optimization for Coordinated UAVs Mission Patrol Under Mountainous Environments." IEEE Transactions on Emerging Topics in Computational Intelligence (2026).
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx