一、引言:被忽视的"暗物质"
在嵌入式开发的技术叙事中,我们习惯于以主控芯片(MCU/MPU)为中心展开讨论。传感器是"感官",通信模块是"语言",而执行器------电机、舵机------往往被简化为"输出端口"的附属品。
但这种视角遮蔽了一个根本事实:嵌入式系统的本质是一个能量转换与信息控制的耦合系统。 电池、舵机、电机、电调这四者构成的并非简单的"供电-驱动"链条,而是一个具有深层拓扑结构的能量执行网络。理解这个网络,是理解嵌入式系统从"能工作"到"工作得好"的关键跃迁。
二、四元解构:从物理层到语义层
2.1 电池:系统的"时间边界"
电池在嵌入式系统中的角色远超"电源"这一功能性描述。从工程视角看,电池不仅提供了额定电压和电流,更定义了这个嵌入式系统的持续存在时长。
在物联网边缘设备中,电池容量与功耗管理的博弈,本质上是一场时间与功能的零和博弈。一块2000mAh的锂电池在3.7V平台下,若系统平均功耗为100mA,则理论续航20小时------这个计算看似简单,但实际的续航受温度、放电曲线、自放电率、峰值电流等多重因素影响。
深度视角 :电池管理不仅是电源设计,更是资源约束下的功能优化------如何在有限能量预算内最大化系统的价值输出。这与经济学中的"预算约束下的效用最大化"问题同构。
参考图片来自百度搜索

2.2 电机:从"转"到"可控"的鸿沟
电机(俗称"马达")是嵌入式系统中最"原始"的执行器。它将电能转化为机械旋转------一个纯粹的物理过程。但这种原始性恰恰揭示了嵌入式开发的核心张力:数字世界的精确性与物理世界的混沌性之间的冲突。
一个GPIO引脚可以输出精确的PWM波形(占空比1%精度),但电机轴上的负载扰动、轴承摩擦、温度漂移会让实际转速产生偏差。这意味着:电机本身不具备"意图实现"能力,它只是能量的物理释放。
这就是为什么电机在嵌入式系统中从来不是孤立存在的------它需要一个中介层来桥接数字意图与物理现实。这个中介层可能是简单的H桥驱动芯片,也可能是复杂的矢量控制算法。
参考图片来自百度搜索
2.3 舵机:闭环的"微型控制器"
舵机是嵌入式系统中最被低估的"控制单元"。表面上看它是一个执行器,本质上它是一个完整的比例控制闭环系统:
┌─────────────┐
│ PWM信号输入 │ ──► 目标角度(数字意图)
└──────┬──────┘
▼
┌─────────────┐
│ 误差比较器 │ ◄── 目标角度 vs 实际角度
└──────┬──────┘
▼
┌─────────────┐
│ 驱动电路 │ ──► 电机转动
└──────┬──────┘
▼
┌─────────────┐
│ 电位器反馈 │ ──► 实际角度(物理现实)
└─────────────┘这个内置的比例控制闭环使舵机成为嵌入式系统中的**"自治子系统"** ------主控只需发送目标角度,舵机自行完成调节与稳定。当到达目标角度后,舵机停止主动驱动 ,依靠减速齿轮组的高传动比产生的机械阻力保持位置;若受外力偏离,误差信号会重新激活驱动进行修正。
架构视角 :舵机代表了一种控制下沉的架构范式。将闭环控制从主控下放到执行器层级,是提升系统实时性和模块化的有效策略。这与现代计算机架构中"端侧智能"的理念异曲同工。
技术细节补充 :普通模拟舵机使用比例控制(P控制),高端数字舵机可能采用更复杂的控制策略,但完整的PID算法在舵机中并不常见。舵机的控制精度受电位器分辨率、齿轮间隙和死区设置限制,典型精度为±1°。
参考图片来自百度搜索

2.4 电调:无刷电机的"协议转换层"
电调(ESC)的存在源于无刷直流电机(BLDC)的物理特性。无刷电机没有机械换向器,需要电子换相------这意味着主控的数字信号与电机的三相驱动之间,存在一个"协议转换"的鸿沟。
电调的核心功能是:
-
功率转换:将直流电逆变为三相交流电
-
换相逻辑:根据转子位置(霍尔传感器或反电动势检测)切换电流方向
-
调速映射:将PWM占空比转换为转速指令
电调的真正价值在于时序解耦------它将主控从高频、高实时性的电机换相时序中解放出来。主控只需发送"意图"(目标转速),电调负责"实现"(每秒数千次的换相操作)。
抽象视角 :电调是嵌入式系统中**硬件抽象层(HAL)**的典型范例。正如操作系统将程序员从寄存器操作中解放,电调将主控从电机物理细节中解放。这种"分层抽象"是复杂系统可管理性的根本保障。
技术细节补充:现代开源电调固件(如BLHeli、AM32)已支持通过配置工具调整PWM协议(Oneshot/Multishot/DShot)、换相提前角、电机定时等参数,实现了一定程度的"软件定义"。
参考图片来自百度搜索
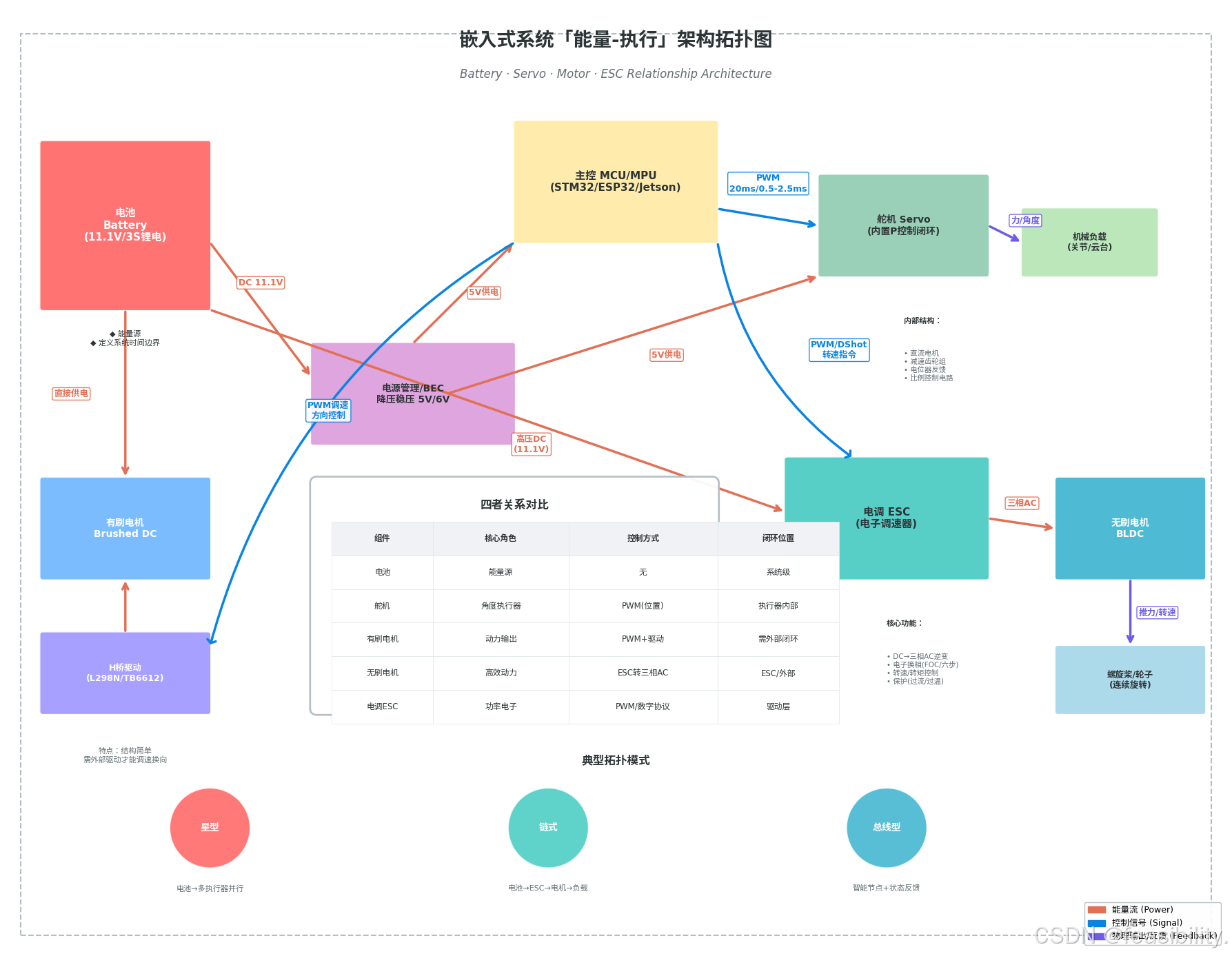
三、关系拓扑:四种耦合模式
四者之间的关系并非线性链条,而是根据应用场景呈现不同的拓扑结构:
模式一:星型拓扑(简单机器人)
┌───── 舵机(云台)
│
电池 ────┼───── 舵机(机械臂)
│
└───── 有刷电机+驱动模块(底盘)特征 :所有执行器直接从电池取电,主控通过PWM分别控制。适合低功耗、低复杂度系统。注意:有刷电机若只需单向全速运转,可直接接电源;若需调速/换向/制动,则必须配备H桥驱动模块(如L298N、TB6612)。
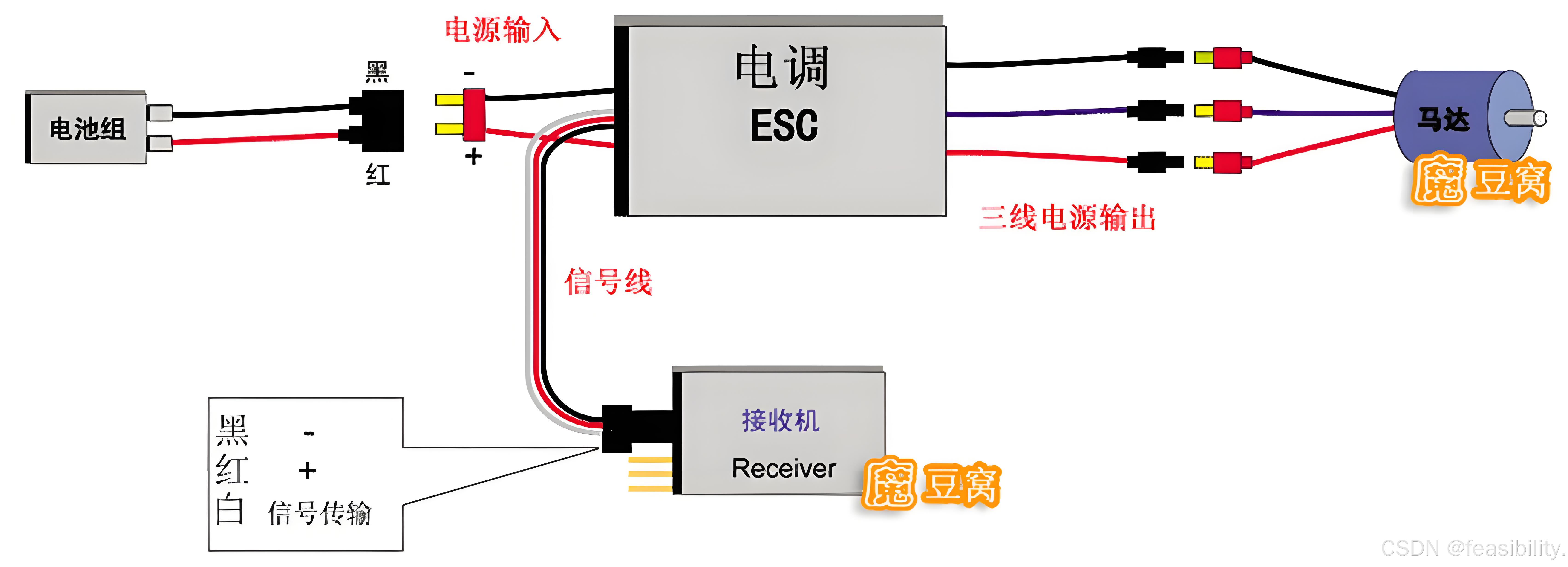
模式二:链式拓扑(无人机)
电池 ──► 电调1 ──► 无刷电机1
│
├──► 电调2 ──► 无刷电机2
│
├──► 电调3 ──► 无刷电机3
│
└──► 电调4 ──► 无刷电机4
│
└── BEC ──► 飞控/接收器/舵机特征 :电调成为能量分配节点,内置BEC(Battery Elimination Circuit,电池等效电路/降压模块)将主电池高压(如11.1V/3S锂电)降压至5V/6V,为低压设备供电。这是一种能量-控制一体化的架构。
限制:BEC输出电流有限(通常2-5A),大功率舵机或多舵机场景需独立UBEC模块。
参考图片(来自https://mbd.baidu.com/newspage/data/dtlandingsuper?nid=dt_5247900577299337802)
模式三:总线拓扑(复杂机器人)
电池 ──► 主电源总线
│
├──► 智能电调(带CAN总线)──► 无刷电机
│
├──► 智能舵机(带反馈总线)──► 机械关节
│
└──► 传感器节点特征 :执行器不再是被动设备,而是总线上的智能节点,可上报状态(电流、温度、位置),实现状态监测和故障预警。
模式四:混合拓扑(现代嵌入式系统)
实际工程中往往是混合架构,核心设计原则是:能量路径与信息路径的分离与协同。
四、必需性之问:什么时候需要它们?
"嵌入式开发必须使用电池、舵机、电机、电调吗?"
这个问题本身预设了一个以执行器为中心 的视角。更根本的问题是:你的嵌入式系统需要与物理世界进行力/运动交互吗?
| 系统类型 | 是否需要动力执行器 | 典型案例 | 备注 |
|---|---|---|---|
| 感知型系统 | 通常否(固定式)/ 是(移动式) | 固定气象站、智能电表 | 移动感知设备(如采样机器人)需要动力执行器 |
| 通信型系统 | 通常否 | 家用路由器、协议网关 | 卫星跟踪天线等机械部分除外 |
| 决策型系统 | 否(纯推理) | 边缘AI推理盒子、云端推理节点 | 若输出驱动执行器则属耦合系统 |
| 物理执行系统 | 是 | 工业机器人、无人机、智能车、机械臂 | 核心特征:力/运动输出 |
核心观点 :嵌入式系统的进化史,是一部**"从计算到物理"的渗透史** 。早期的嵌入式设备(如微波炉控制器)只做逻辑决策;现代嵌入式系统中,需要与物理世界交互的部分 (如自动驾驶域控制器、机器人)必须闭环到物理执行。电池-舵机-电机-电调这个网络,正是数字世界向物理世界伸出的手------但并非所有嵌入式系统都需要这只手。
五、边界与约束:工程现实的铁律
在展望未来之前,必须清醒认识当前技术的物理边界:
5.1 实时性约束
舵机/电机的控制周期通常在1-20ms级别。高动态场景(如无人机姿态稳定、机器人平衡控制)要求本地闭环 ,任何网络传输引入的时延都可能导致系统失稳。这意味着"云端实时控制执行器"在工程上不可行------云化只适用于非实时或弱实时场景(如慢速巡检、粗定位任务)。
5.2 功率与信号的分离
大功率电机启动时的电流尖峰(可达额定电流的5-10倍)会产生严重的电磁干扰。因此,能量总线与数据总线在物理层必须分离。PoE(以太网供电)等技术仅适用于低功率场景(<100W),无法驱动动力执行器。
5.3 电池的能量密度瓶颈
当前锂离子电池能量密度约250-300Wh/kg,固态电池有望提升至500Wh/kg。但在可预见的未来,电池能量密度的提升速度远低于计算能力的增长(对比摩尔定律与电池发展的"龟速")。这意味着"功耗优化"将长期是嵌入式系统的核心挑战。
六、演进方向:在约束中寻找突破
基于上述边界,未来的"能量-执行"架构演进应聚焦以下可行方向:
6.1 软件可配置电调
现代开源电调已实现通过配置工具调整控制参数(PWM协议、换相策略、保护阈值)。下一步是标准化配置接口(类似USB设备的描述符),使主控能自动识别电调能力并优化控制策略。
6.2 执行器状态数字化
传统舵机/电机是"黑盒"------主控发送指令,不知执行器实际状态。集成电流传感器、温度传感器、位置编码器的智能执行器可将状态通过总线(CAN、RS-485)反馈给主控,实现:
-
过载保护与故障诊断
-
基于实际负载的自适应控制
-
预测性维护(如齿轮磨损预警)
6.3 能量-计算协同优化
在电池供电的嵌入式系统中,计算负载与能量消耗直接耦合。未来的架构设计应将功耗作为一等约束:
-
任务调度考虑能量状态(低电量时降低控制频率)
-
执行器动作规划考虑能量效率(如机械臂轨迹的能耗优化)
-
能量收集(太阳能、动能回收)与主电池的混合管理
七、结语:回归系统的整体性
电池、舵机、电机、电调------这四者在技术文档中常被分章节介绍,但在真实的嵌入式系统中,它们是一个不可割裂的有机整体:
-
电池设定了系统的能量边界与存在时长
-
电机提供了系统与物理世界交互的原初动力
-
舵机展示了控制下沉与模块化的架构价值
-
电调诠释了分层抽象对复杂系统的解耦作用
理解它们的关系,不仅是掌握几项元器件的使用方法,更是理解嵌入式系统作为"数字-物理混合体"的本质 。在这个意义上,每一个嵌入式开发者都是一位边界建筑师------在比特与原子之间,在能量与信息之间,在控制与混沌之间,构建着人类意图向物理世界的可靠延伸。
实践建议:如果你正在设计一个嵌入式系统,不妨先画一张"能量-控制拓扑图"------标注能量如何从电池流向各个执行器,控制信号如何从主控流向各个闭环,以及哪些闭环是本地的、哪些需要主控介入。这张图往往比电路原理图更能揭示系统的本质结构。