导读:
针对无人机磁探测任务中因机载电子系统、姿态机动等因素诱发的高维度非线性磁干扰问题,开展了基于深度学习与状态估计融合的改进磁补偿模型研究。提出了一种基于LSTM与扩展卡尔曼滤波(EKF)的耦合补偿模型。该模型发挥了LSTM网络对电机转速、相电流等异构特征的时序非线性演化规律的捕获能力,并结合EKF对非线性观测残差的实时后验修正,克服了单一神经网络在实测工况下易产生预测漂移与高频波动的问题。仿真结果表明,本文方法在应对复杂耦合干扰时,补偿精度较传统T-L模型及单一深度学习模型显著提升,改善比达到17.25。在无人机实机飞行试验中,补偿后的均方根误差降至1.7403 nT,改善比较次优模型提升了约39%。研究表明,该耦合算法能够有效抑制机载电子设备产生的动态磁畸变,显著提升磁测数据质量,为高精度磁探测提供了技术支撑。
作者信息:
刘 颖:中国科学院空天信息创新研究院,北京;中国科学院空天信息创新研究院电磁辐射与探测技术重点实验室,北京;中国科学院大学电子电气与通信工程学院,北京;王 顺, 纪奕才, 黄 玲, 刘小军, 方广有:中国科学院空天信息创新研究院,北京;中国科学院空天信息创新研究院电磁辐射与探测技术重点实验室,北京
论文详情
算法原理与系统模型
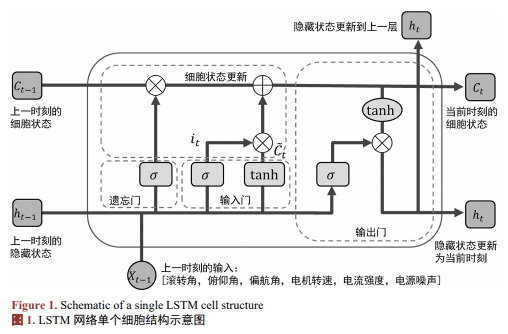
LSTM 网络单个细胞结构示意图如图1。
具体算法详见原文。
实验设计与分析
为了确保补偿模型的有效性与泛化能力,本研究设计的实验流程如图 2 所示。

在仿真实验中,LSTM 神经网络结构如图 3 所示,学习部分的输入特征、网络架构及训练优化设置 如表 1 所示。
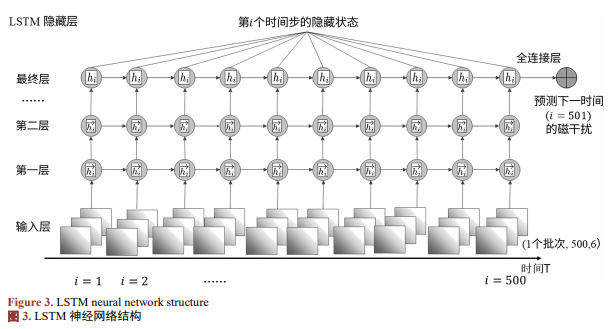
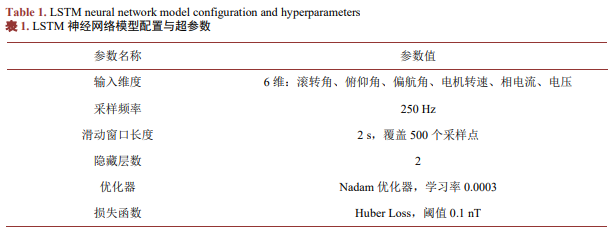
图 4,图 5 展示了模拟生成的真实磁场和含干扰源的测量磁场,以及这些算法在应对高维度耦合干扰时的补偿轨迹。
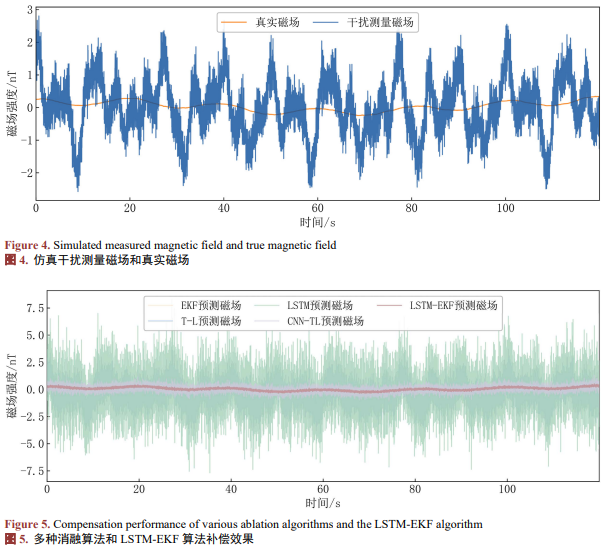
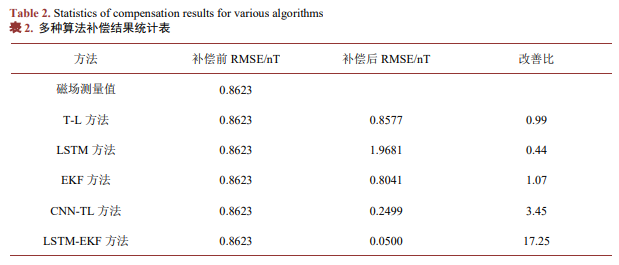
由表 2 的评价指标可知 LSTM-EKF 的 RMSE 和 IR 在仿真场景里,这 5 种算法之间取得了最优的性能。LSTM,-EKF 算法与其他两种方法对比,补偿精度分别提高了 67%、45%;改善比分别提高了 29.29、 19.75,证明该算法有效地补偿了磁干扰,提高磁测数据的质量。
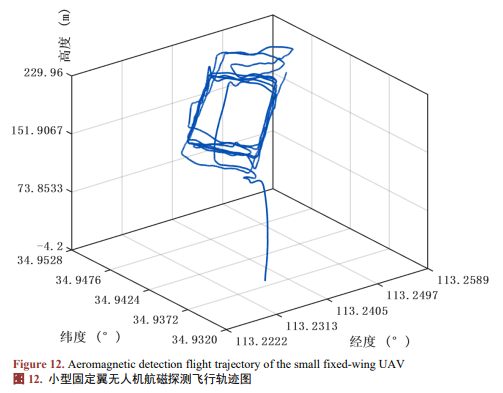
在模型训练阶段,无人机通过执行特定序列的机动动作来诱发磁场畸变特征,即在东南西北四个基 准航向上依次进行受控的俯仰、横滚与偏航运动。其中俯仰与偏航的姿态摆动幅度严格控制在正负 5 度以内,而横滚动作则适度增强至正负 10 度以上,飞行轨迹如图 12 所示。
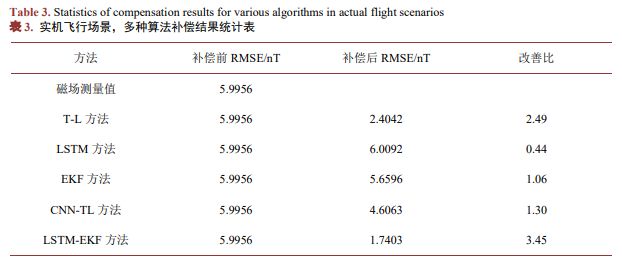
由表 3 可得,利用长短期记忆网络挖掘姿态、转速与电流参量间的时序非线性规律,同时利用雅可 比矩阵进行动态线性化,使得补偿后的均方根误差降至 1.7403 nT,改善比 3.45 相比表现次优的改善比为 2.49 的 T-L 线性方法提升了约 39%。
本文提出的算法将 LSTM 与 EKF 相结合,利用 LSTM 学习干扰信号的时序变化规律,再通过 EKF 对残余噪声进行滤波处理,两者配合能够同时抑制趋势性干扰和随机噪声,从而提高磁补偿精度。
结论
长短期记忆网络能够通过其特有的门控机制,从姿态、转速及电流等多维参量中深度挖掘非线性干 扰的时序演化规律,从而在源头上实现了对动力系统动态扰动特征的精确捕捉。与此同时,引入扩展卡 尔曼滤波算子对神经网络的前馈预测残差进行后验修正,利用雅可比矩阵实现了非线性观测空间的实时线性化映射。这种耦合机制有效地克服了单一深度学习模型在面对实测随机噪声时易产生的预测漂移与 高频波动问题,确保了补偿结果在复杂机动工况下的动态平稳性。
实验数据表明,相比于传统 T-L 模型及单一神经网络方案,本文提出的 LSTM-EKF 算法在实机飞行 场景下展现出卓越的剥离能力,其补偿后的残差均方根误差显著降低,改善比相比次优方案提升了约 39%。 该算法在理论上解决了多源耦合磁干扰的解算难题,且在实测任务中表现出极高的可靠性与泛化精度, 在无人机磁法勘探及高灵敏度磁异常检测领域具有显著的工程应用价值与技术优势。
基金项目:
项目"新型考古遗存电--磁探测系统装备研发"(E1BD100104)