ros2 bag 是 ROS2 中最常用的数据记录工具,但多数使用者仅停留在"录制后直接播放"的层面。当需要复现实车故障、向仿真环境注入真实数据或进行长时间跨度分析时,bag 的高级能力------时间控制、多文件合并、动态重映射以及与 TF 系统的协同------才是真正的调试利器。本文将系统介绍这些技术细节。
一、时间控制核心:--clock 与 /use_sim_time
播放 bag 时加上 --clock 选项,bag 节点会发布 /clock 话题,其时间戳为 bag 中记录的原始时间。此时,任何将 use_sim_time 参数设为 true 的 ROS2 节点都会自动从 /clock 获取时间,而非系统墙钟。这使得回放行为与录制时完全一致------包括节点内的定时器周期、超时检测、TF 缓存等均按原始时间轴推进。
典型操作顺序:先启动所有需要模拟时间的节点,在启动参数或 launch 文件中设置 {'use_sim_time': True},然后执行 ros2 bag play --clock /path/to/bag。注意顺序:节点必须在 bag 播放前完成参数设置,否则节点会先使用墙钟初始化,后续切换时钟会导致时间跳跃。
更精细的控制包括:
-
--rate参数:
--rate 0.5使时间流逝减半,用于慢放分析;--rate 2.0加速回放,但需确认下游节点能否处理更高频率的数据。 -
--start-paused:bag 启动后处于暂停状态,等待用户按空格或发送服务调用
ros2 service call /bag_player/next std_srvs/Empty逐帧推进------这对步进式调试极端有用。 -
--loop:循环播放 bag 数据,用于压力测试。
二、多 bag 合并与时间窗口切片
实际调试中常需将多个 bag 合并成一个连续序列,或从长 bag 中提取特定时间片段。
合并 bag :使用 ros2 bag merge 命令(ROS2 Humble 及以上版本提供)。例如 ros2 bag merge bag1/ bag2/ -o merged_bag。要求各 bag 的 topic 类型一致且时间不重叠或允许重叠(重叠部分按原始时间顺序保留)。更灵活的方式是使用 Python 脚本通过 rosbag2_py 逐条读取写入。
时间窗口切片 :ros2 bag filter 命令可按时间戳过滤。例如提取从 10.5 秒到 20.3 秒的数据:
ros2 bag filter original_bag/ -o sliced_bag -s 10.5 -e 20.3
该命令会遍历 bag 中的所有消息,仅保留时间戳在指定区间内的条目。
三、动态修改 topic 名称播放
播放 bag 时,可以使用 --remap 选项将录制的 topic 重映射到新的名称。例如:
ros2 bag play recorded_bag/ --remap /camera/image_raw:=/camera/input_image
这对于将旧 bag 数据注入到不同 topic 名称的新节点中非常有用。可以多次使用 --remap 同时重映射多个 topic。
如果需要更复杂的重命名规则(如添加前缀、批量修改),推荐使用 rosbag2_py 编写脚本逐条修改消息的 topic_name 字段并写入新 bag。
四、修复损坏的 bag:ros2 bag reindex
bag 录制过程中如果进程被强制终止或磁盘写满,可能导致 metadata 文件损坏,表现为 ros2 bag play 无法识别或播放中途报错。ros2 bag reindex 命令通过扫描所有 .db3 文件重建索引。用法:
ros2 bag reindex damaged_bag/
执行后会生成新的 metadata.yaml 文件,恢复可播放状态。注意该命令不会修复消息数据本身的损坏,仅重建元数据索引。
五、TF 系统的时间难题:use_sim_time 与静态 TF 树
回放 bag 时最常见的故障是 TF 数据异常------坐标变换突然跳跃或完全丢失。根本原因在于 TF 的静态与动态广播对模拟时间的处理不同。
静态 TF (通过 tf2_ros::StaticTransformBroadcaster 发布)通常在节点启动时广播一次,其时间戳是节点启动时的墙钟(或当时设置的 use_sim_time 值)。如果回放 bag 时节点先启动(使用 use_sim_time=true 但 bag 尚未播放),静态 TF 的时间戳可能是 0 或很小的值;而当 bag 播放推进到较大时间戳时,TF 树查询会因时间差过大而失败。
正确做法:
-
所有涉及 TF 的节点必须在 bag 播放之前 设置好
use_sim_time=true。 -
静态 TF 不应在节点构造函数中直接广播,而应放在
on_activate或收到/clock第一帧后广播,确保时间戳与模拟时间对齐。 -
对于录制时已有的静态 TF,bag 中会记录
tf_static话题(包含所有静态变换)。播放时需确保该话题被正确重放,且接收端不重复广播。
六、Python 脚本处理 bag:使用 rosbag2_py
对于过滤、重映射、降采样等复杂操作,rosbag2_py 是官方推荐的 Python 接口。以下是一个降采样示例:
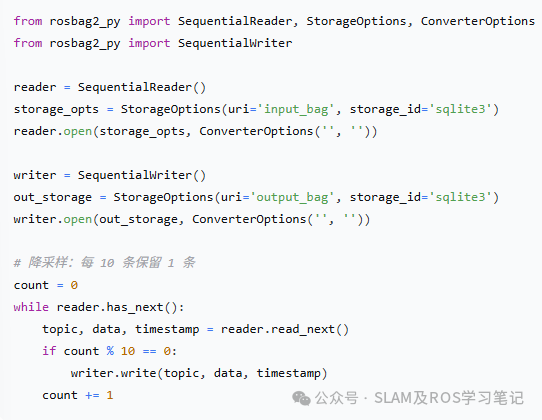
实际应用中可增加 topic 过滤、类型检查、时间戳偏移等功能。
七、bag 时钟与 Gazebo 同步:真实数据注入仿真
将实车录制的 bag 数据注入 Gazebo 仿真,可以混合真实传感器数据与仿真环境。关键步骤:
-
在 Gazebo 的 world 文件中禁用其自身的物理时钟生成,或让 Gazebo 使用
/clock话题。 -
启动 Gazebo 并设置
use_sim_time=true。 -
播放 bag 时加上
--clock,并确保 Gazebo 节点订阅/clock。 -
将 bag 中的控制指令(如
/cmd_vel)重映射到 Gazebo 中模型的控制 topic。
这种方法可以验证控制算法在真实传感器噪声下的表现,同时保留仿真环境的可重复性。
八、调试"TF 跳跃"问题的具体步骤
当回放 bag 时出现 TF 突然跳跃,按以下步骤排查:
-
检查时钟源
:确认所有节点(包括
tf2_ros的transform_listener)的use_sim_time参数均为true。 -
查看
/clock话题:
ros2 topic echo /clock --once确认 bag 播放器正在发布时钟,且时间连续。 -
检查
tf_static话题:
ros2 bag info查看 bag 是否包含tf_static。如果缺失,需要重新录制或在播放时手动补充静态变换。 -
使用
tf2_tools监控:
ros2 run tf2_tools view_frames生成 frames.pdf,观察变换树是否在某个时刻断裂。 -
回放时打印 TF 时间戳
:在自定义节点中打印
lookupTransform的time参数和实际返回的变换时间,检查时间差是否超过transform_timeout(默认 0.1 秒)。 -
尝试降低播放速率
:
--rate 0.5可缓解因 CPU 负载导致的 TF 缓存更新延迟。
九、总结
ros2 bag 远不止简单的录放功能。通过 --clock 与 /use_sim_time 实现精确时间控制,利用 merge、filter、reindex 管理数据,借助 rosbag2_py 进行灵活处理,并正确处理 TF 与模拟时间的配合,可以构建强大的数据回放调试环境。这些技术对于实车故障复现、算法迭代测试以及仿真混合验证都至关重要。