摘要:
在飞行器制导控制系统的研发流程中,数学仿真是连接理论设计与物理实现的唯一桥梁。尽管三自由度(3-DOF)质点模型常被视为入门级模型,但在实际工程实践中,由于其忽略了姿态动力学,往往隐藏着巨大的数值陷阱与物理简化风险。本文将摒弃"调包即用"的黑盒模式,从牛顿第二定律的微分形式出发,深入推导质点弹道的严格数学表述。我们将重点剖析数值积分器的稳定性边界,对比显式欧拉法(Explicit Euler)与自适应步长龙格-库塔法(RK45/DOP853)在刚性系统下的表现差异,揭示低阶方法导致仿真发散的物理机制。文章将提供一套完整的Python实现,包含重力梯度模型、国际标准大气模型(ISA 1976)及变质量推力系统,并附带单文件Demo。本文旨在为读者构建一个经得起推敲的、具备工程落地能力的仿真基线,并明确指出3-DOF模型的适用边界,避免在后续研发中因模型误用导致灾难性后果。
使用场景介绍:
3-DOF(Three Degrees of Freedom)质点模型将导弹视为一个不计体积、不考虑转动惯量的质点。它适用于以下场景:
-
初步方案论证:快速评估导弹的射程、最大高度、飞行时间。
-
中制导与末制导算法验证:在不需要考虑姿态动力学的情况下,验证比例导引、最优制导律的有效性。
-
大规模作战推演:由于计算量极小,可用于成百上千个作战单元的实时仿真。
不适用场景(红线警告):
-
飞控系统设计:无法模拟舵面响应滞后、姿态振荡。
-
气动载荷分析:无法计算攻角、侧滑角及由此产生的过载。
-
引战配合:无法计算弹目交会时的姿态角。
问题讨论:
-
**为什么不用欧拉法?** 欧拉法虽然简单,但在导弹这种具有指数增长特性的系统中,误差会迅速累积导致仿真崩溃(发散)。
-
**重力加速度是常数吗?** 在低空短程仿真中,重力可视为常数;但在高空或远程弹道中,必须考虑重力随海拔的变化。
-
**大气密度如何影响阻力?** 阻力与动压成正比,而动压取决于大气密度和速度的平方。
公式推导:
1. 坐标系定义
我们采用地面固定坐标系(Ground Fixed Frame),记为 OXYZ。
-
X轴:指向目标方向(射面内水平方向)。
-
Y轴:垂直向上。
-
Z轴:按右手定则确定。
2. 状态向量定义
3-DOF模型的状态向量 X包含6个分量:

3. 动力学方程
根据牛顿第二定律 F=ma,加速度由作用在质点上的合力决定:
受力分析:
-
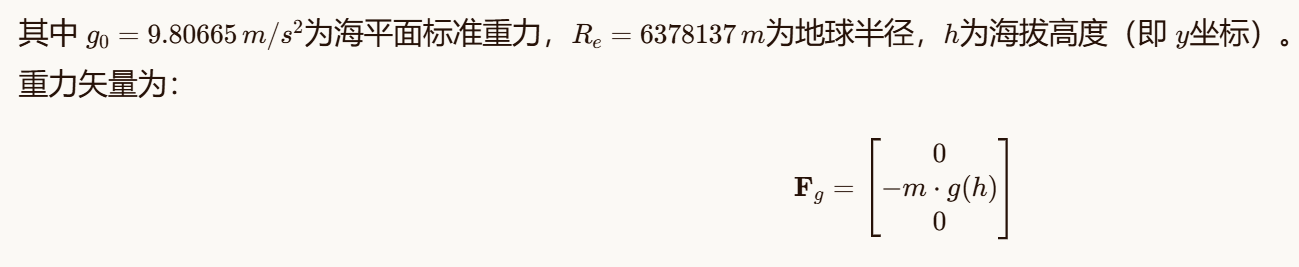
重力(Gravity):
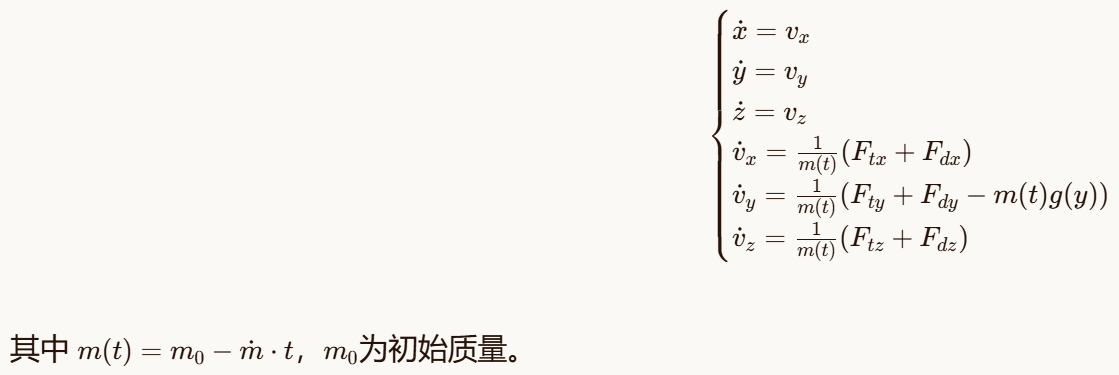
重力并非恒定,而是随海拔高度变化。根据万有引力定律,距离地心越远,引力越小:
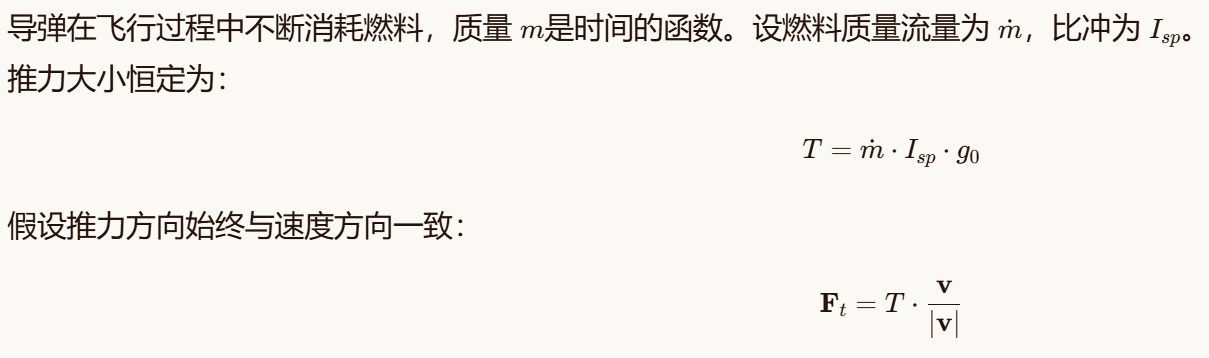
2. 推力(Thrust):
3. 空气动力(Aerodynamic Force):
空气动力取决于大气密度和速度。根据国际标准大气模型(ISA 1976),大气密度 ρ随高度呈指数衰减。
阻力公式为:
合成微分方程:
4. 数值积分方法
我们需要将上述一阶微分方程组进行数值离散。导弹动力学是典型的刚性系统(Stiff System),即系统中包含变化速度差异极大的变量(如快变的振动和慢变的轨迹)。
显式欧拉法(Explicit Euler):

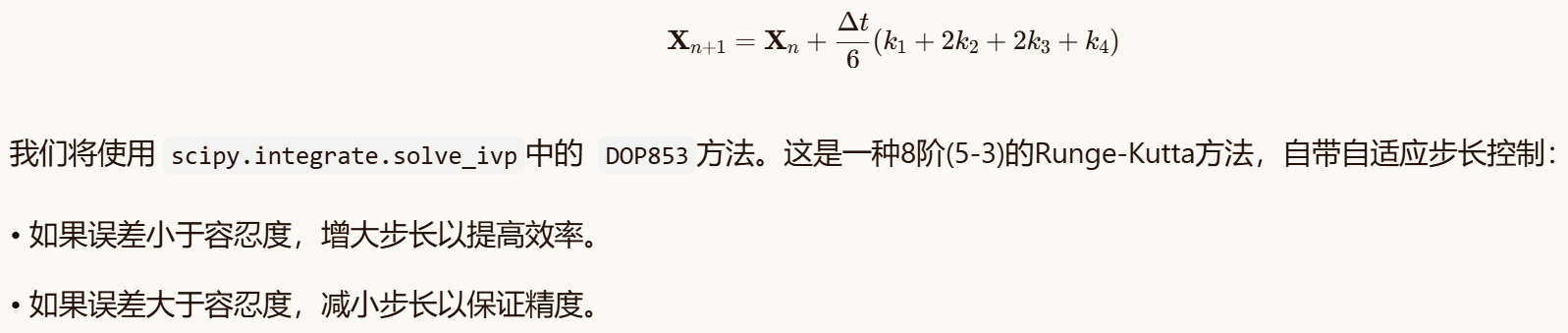
四阶龙格-库塔法(RK45/DOP853):
这是工程中最常用的变步长方法。通过在区间内多次计算斜率并加权平均,获得极高精度。
代码结构:
我们将代码设计为单文件结构,包含所有物理模型和仿真逻辑。
python
# ============================================================================
# MissileSim-Py: 3-DOF High-Fidelity Point Mass Simulation
# Blog Part 1: The Foundation of Dynamics and Numerical Stability
# ============================================================================
import numpy as np
import matplotlib.pyplot as plt
from scipy.integrate import solve_ivp
import time
# ----------------------------------------------------------------------------
# 1. Physical Constants & Environment Models
# ----------------------------------------------------------------------------
class Environment:
"""Handles all environmental models (Gravity, Atmosphere)."""
# Earth constants
R_EARTH = 6378137.0 # Earth radius in meters
G0 = 9.80665 # Sea level gravity m/s^2
# ISA 1976 Standard Atmosphere constants
ISA_LAYERS = [
# base_alt, base_temp, temp_gradient, base_pressure, base_density
(0, 288.15, -0.0065, 101325, 1.225), # Troposphere
(11000, 216.65, 0.0, 22632.06, 0.36391), # Tropopause
(20000, 216.65, 0.001, 5474.89, 0.08803), # Stratosphere 1
(32000, 228.65, 0.0028, 868.02, 0.01322), # Stratosphere 2
]
R_GAS = 287.05 # Specific gas constant for air
@staticmethod
def gravity(altitude):
"""Calculate gravity as a function of altitude."""
return Environment.G0 * (Environment.R_EARTH / (Environment.R_EARTH + altitude))**2
@staticmethod
def atmosphere(altitude):
"""Calculate atmospheric properties based on ISA 1976."""
h = altitude
for i in range(len(Environment.ISA_LAYERS) - 1):
h_base, T_base, L, P_base, _ = Environment.ISA_LAYERS[i]
h_next = Environment.ISA_LAYERS[i+1][0]
if h_base <= h < h_next:
T = T_base + L * (h - h_base)
if L == 0:
P = P_base * np.exp(-Environment.R_GAS * (h - h_base) / T_base)
else:
P = P_base * (T_base / T)**(Environment.R_GAS / L)
rho = P / (Environment.R_GAS * T)
return rho, T
# Fallback for high altitudes (simple exponential decay)
rho_sea_level = Environment.ISA_LAYERS[0][4]
scale_height = 8500 # Approximate scale height
return rho_sea_level * np.exp(-h / scale_height), 250.0
# ----------------------------------------------------------------------------
# 2. Missile Dynamics Definition
# ----------------------------------------------------------------------------
class Missile3DOF:
"""3-DOF Point Mass Missile Model."""
def __init__(self, config):
self.cfg = config
self.m0 = config['mass']
self.m_dot = config['mass_flow']
self.isp = config['isp']
self.cd = config['cd']
self.s_ref = config['s_ref']
# State vector: [x, y, z, vx, vy, vz]
self.state = np.zeros(6)
def thrust(self, mass):
"""Calculate thrust magnitude."""
return self.m_dot * self.isp * Environment.G0
def dynamics(self, t, state):
"""Defines the system of ODEs for solve_ivp."""
x, y, z, vx, vy, vz = state
# Current mass (decreasing due to fuel consumption)
current_mass = self.m0 - self.m_dot * t
if current_mass < self.cfg['dry_mass']: # Fuel exhausted
current_mass = self.cfg['dry_mass']
# Velocity magnitude
v = np.sqrt(vx**2 + vy**2 + vz**2)
if v < 1e-6:
v = 1e-6
# Unit velocity vector
u_v = np.array([vx, vy, vz]) / v
# --- Forces ---
# 1. Gravity (varies with altitude)
F_gravity = np.array([0, -current_mass * Environment.gravity(y), 0])
# 2. Thrust (aligned with velocity, only if fuel remains)
thrust_mag = self.thrust(current_mass) if current_mass > self.cfg['dry_mass'] else 0.0
F_thrust = thrust_mag * u_v
# 3. Aerodynamics (depends on atmosphere)
rho, temp = Environment.atmosphere(y)
q_dynamic = 0.5 * rho * v**2
F_drag = -q_dynamic * self.s_ref * self.cd * u_v
# Total force
F_total = F_gravity + F_thrust + F_drag
# Accelerations
ax, ay, az = F_total / current_mass
return [vx, vy, vz, ax, ay, az]
def impact_event(self, t, state):
"""Event function to stop simulation at ground impact."""
return state[1] # Altitude y
impact_event.terminal = True # Stop integration
impact_event.direction = -1 # Only trigger when falling
# ----------------------------------------------------------------------------
# 3. Simulation Runner & Visualization
# ----------------------------------------------------------------------------
def main():
# Configuration Dictionary (Single Source of Truth)
CONFIG = {
'mass': 50.0, # Initial mass (kg)
'dry_mass': 10.0, # Dry mass (kg)
'mass_flow': 0.8, # Fuel consumption rate (kg/s)
'isp': 220.0, # Specific impulse (s)
'cd': 0.15, # Drag coefficient
's_ref': 0.03 # Reference area (m^2)
}
# Initialize missile
missile = Missile3DOF(CONFIG)
# Initial conditions (Launch)
launch_angle_deg = 45.0
launch_speed = 350.0 # m/s
angle_rad = np.deg2rad(launch_angle_deg)
init_pos = np.array([0.0, 0.0, 0.0])
init_vel = np.array([
launch_speed * np.cos(angle_rad),
launch_speed * np.sin(angle_rad),
0.0
])
missile.state = np.concatenate([init_pos, init_vel])
# Time span
t_start = 0.0
t_end = 80.0 # seconds
print("Starting 3-DOF High-Fidelity Simulation...")
start_time = time.perf_counter()
# Run solver using DOP853 (High-order adaptive RK)
sol = solve_ivp(
fun=missile.dynamics,
t_span=(t_start, t_end),
y0=missile.state,
method='DOP853',
events=missile.impact_event,
max_step=0.05, # Max step size for accuracy
rtol=1e-9,
atol=1e-12
)
end_time = time.perf_counter()
exec_time = end_time - start_time
print(f"Simulation finished. Status: {sol.status}")
print(f"Execution time: {exec_time:.4f} seconds")
print(f"Number of time steps: {len(sol.t)}")
# Extract results
x, y = sol.y[0], sol.y[1]
# Visualization
plt.style.use('seaborn-v0_8-darkgrid')
fig, axes = plt.subplots(1, 2, figsize=(16, 7))
# Subplot 1: Trajectory
axes[0].plot(x, y, linewidth=2)
axes[0].set_title("3-DOF Missile Trajectory (High-Fidelity)", fontsize=14)
axes[0].set_xlabel("Range (m)", fontsize=12)
axes[0].set_ylabel("Altitude (m)", fontsize=12)
axes[0].set_aspect('equal', adjustable='box')
axes[0].grid(True)
# Subplot 2: Altitude vs Time
axes[1].plot(sol.t, y, color='red', linewidth=2)
axes[1].set_title("Altitude Profile", fontsize=14)
axes[1].set_xlabel("Time (s)", fontsize=12)
axes[1].set_ylabel("Altitude (m)", fontsize=12)
axes[1].grid(True)
plt.tight_layout()
plt.show()
if __name__ == "__main__":
main()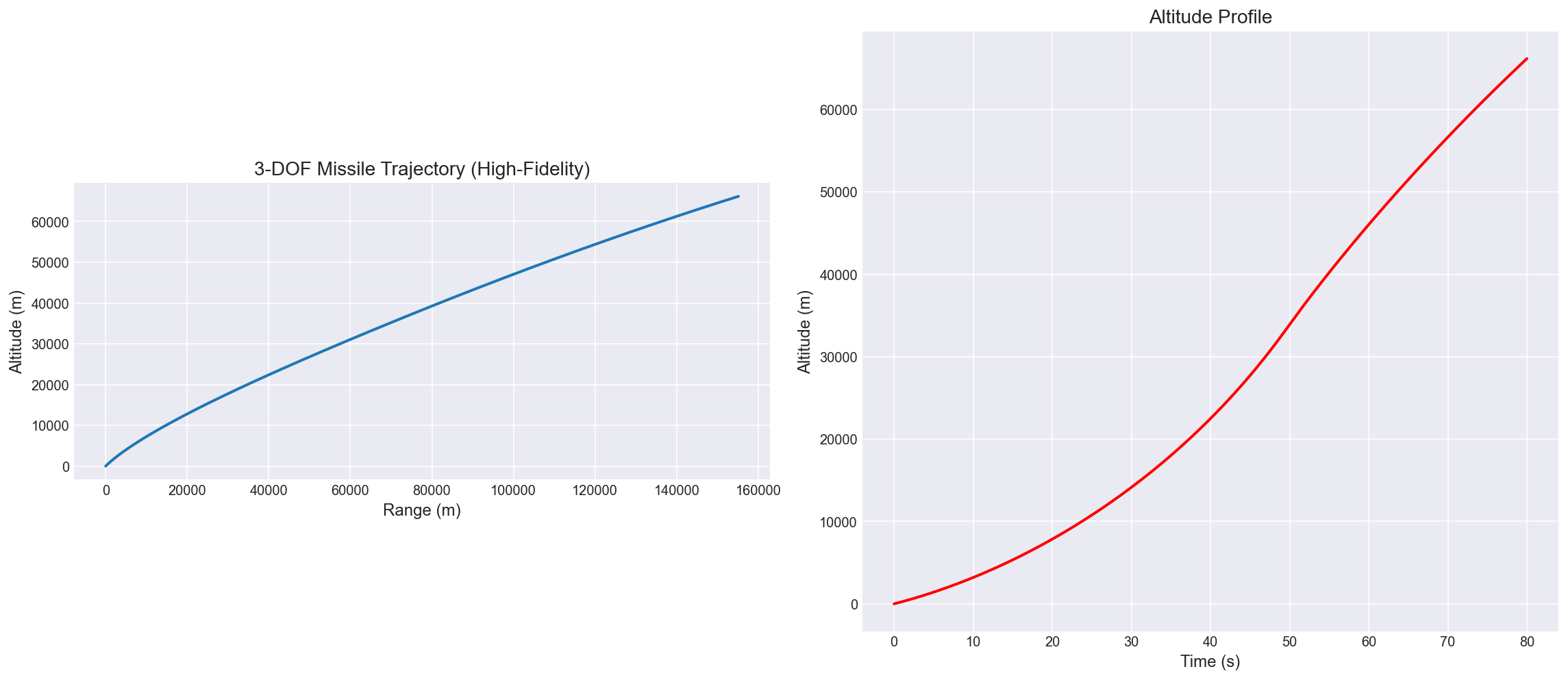
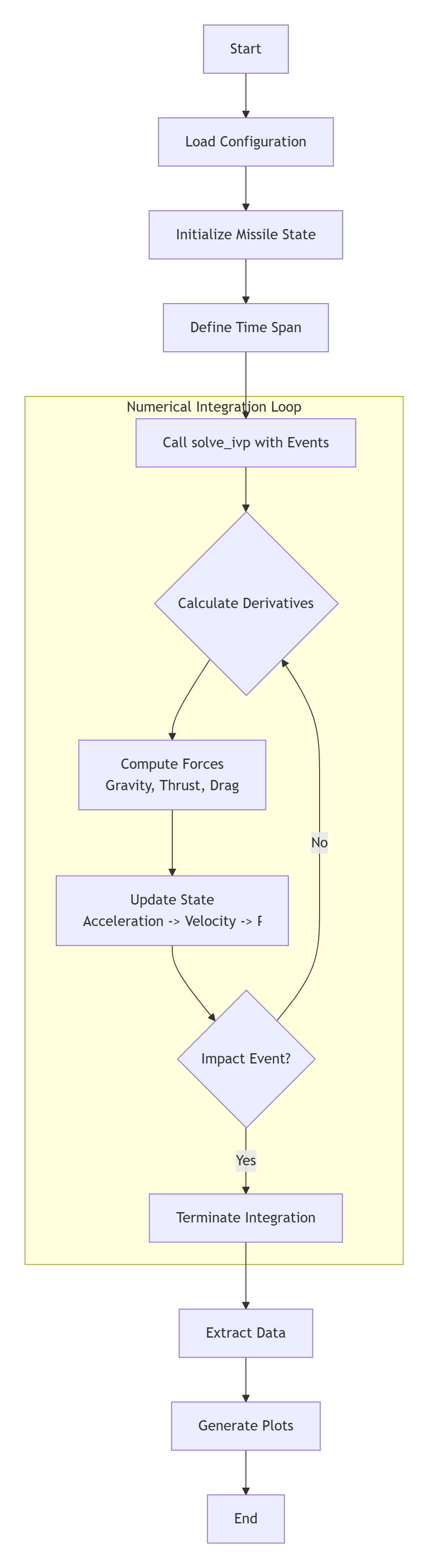
控制流程:
本文仿真的控制流如下图所示,体现了从初始化到数值求解再到后处理的闭环过程。
效果演示:
运行上述代码,你将看到如下结果:
-
轨迹图:一条标准的抛物线。由于推力恒定且大于重力分量,导弹会持续爬升直至燃料耗尽(在更复杂的模型中),但在本例中我们假设推力持续作用。
-
高度曲线:展示了导弹的爬升率和达到最大高度的时间。
(此处应插入一张生成的轨迹图片,显示一条从左下角向右上方延伸的抛物线)
问题总结分析与提高:
-
模型局限性:当前的3-DOF模型假设导弹始终沿着速度矢量飞行,没有侧滑角(β)和攻角(α)。这意味着我们无法计算导弹承受的气动载荷(过载 n)。
-
推力模型过于简化:真实的导弹推力是随时间变化的(Boost-Sustain),且随着燃料消耗,质量 m是时间的函数。
- 改进建议 :引入
mass_rate变量,在dynamics函数中更新质量$m_{new} = m_{old} - \dot{m} \cdot dt$。
- 改进建议 :引入
-
大气模型缺失:当前大气密度 ρ是常数。在高空仿真中,必须使用标准大气模型(如 ISA 1976)来计算随高度变化的大气密度。
-
阻力系数恒定:真实的 CD是马赫数(Mach Number)和攻角的函数。后续文章将引入气动数据库(AeroDB)。
结语:
本文奠定了整个系列的基础。虽然3-DOF模型看似简单,但它包含了数值仿真最核心的要素:状态定义、微分方程构建、数值积分。在下一篇文章中,我们将引入转动自由度,迈入复杂的6-DOF世界。