目录
1.摘要
针对基础设施匮乏环境下无人机辅助边缘计算的部署难题,本文提出一种基于梯度优化算法(GBO),通过结合全局探索与局部精细化机制,并引入时间图模型捕捉动态交互,实现了在降低能量损耗与重叠覆盖的同时,最大化地面用户覆盖率与节点间连通性。仿真结果表明,该方案在复杂灾区场景下具有极高的收敛效率与扩展性,显著提升了资源受限系统的实时服务能力。
2.无人机边缘计算系统(UECS)
系统架构
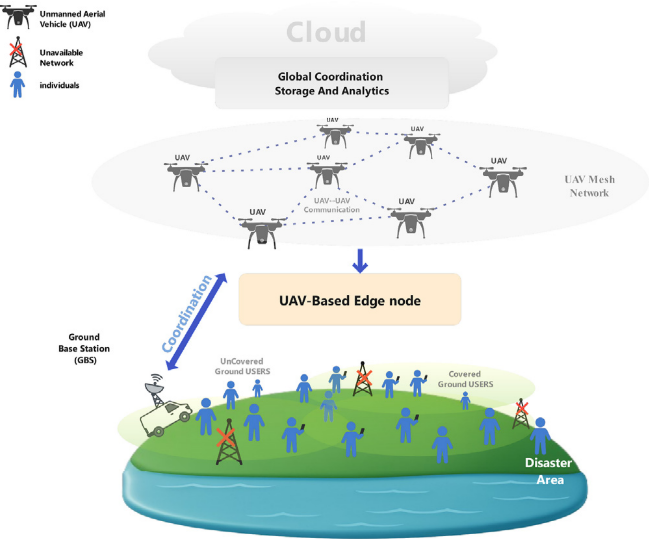
针对灾后等基础设施缺失场景,本文提出一种三层架构的无人机边缘计算系统,利用无人机作为移动边缘节点,通过云端管理、边缘计算与地面接入的协同,实现在动态环境下的按需资源调度。
系统建模与假设
UECS动态时空演化模型系统由执行边缘计算任务的无人机集 E E E 与地面准静态用户集 U U U 构成,通过域离散化建立时变图 G τ = ( V τ , L τ ) G_{\tau} = (V_{\tau}, L_{\tau}) Gτ=(Vτ,Lτ),其拓扑更新遵循:
V τ + 1 = V τ + Δ U τ + Δ E τ V_{\tau+1} = V_{\tau} + \Delta U_{\tau} + \Delta E_{\tau} Vτ+1=Vτ+ΔUτ+ΔEτ
链路状态受限于欧氏距离 d ( ⋅ ) d(\cdot) d(⋅) 与通信半径 γ \gamma γ,判定准则如下:
L τ + 1 = { ( u i , e j ) ∣ d ( u i , e j ) ≤ γ j } ∪ { ( e i , e j ) ∣ d ( e i , e j ) ≤ γ } L_{\tau+1} = \{(u_i, e_j) \mid d(u_i, e_j) \leq \gamma_j\} \cup \{(e_i, e_j) \mid d(e_i, e_j) \leq \gamma\} Lτ+1={(ui,ej)∣d(ui,ej)≤γj}∪{(ei,ej)∣d(ei,ej)≤γ}
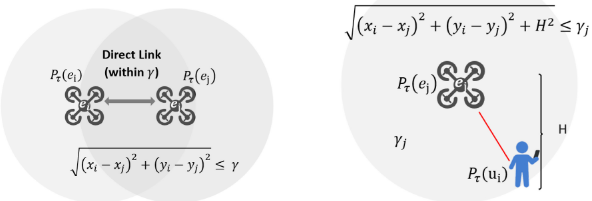
在固定高度 H H H 的约束下,用户覆盖需满足三维空间距离阈值:
( x i − x j ) 2 + ( y i − y j ) 2 + H 2 ≤ γ j \sqrt{(x_i - x_j)^2 + (y_i - y_j)^2 + H^2} \leq \gamma_j (xi−xj)2+(yi−yj)2+H2 ≤γj
无人机间水平连通性判定简化为:
( x i − x j ) 2 + ( y i − y j ) 2 ≤ γ \sqrt{(x_i - x_j)^2 + (y_i - y_j)^2} \leq \gamma (xi−xj)2+(yi−yj)2 ≤γ
3.问题定义与表述
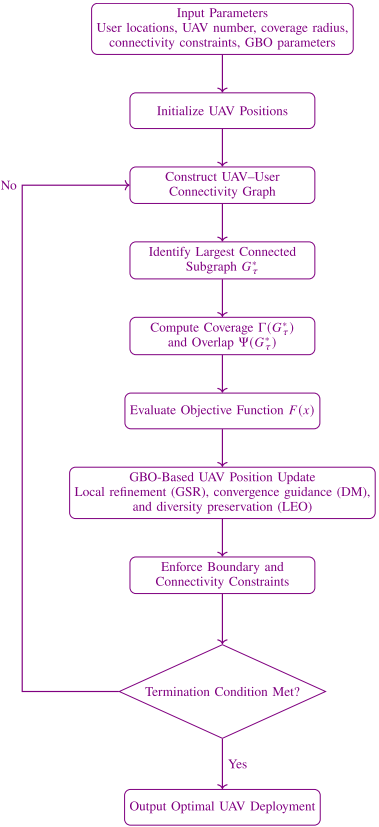
将网络建模为动态无向图 G τ = ( V τ , L τ ) G_\tau=(V_\tau,L_\tau) Gτ=(Vτ,Lτ),算法优先选取规模最大且密度最高的连通子图 G τ ∗ G_{\tau}^* Gτ∗作为服务核心。其中,子图密度 G D G_D GD 定义为:
G D ( G i τ ) = 2 ∣ E i τ ∣ ∣ V i τ ∣ ( ∣ V i τ ∣ − 1 ) G_D(G_i^\tau)=\frac{2|E_i^\tau|}{|V_i^\tau|(|V_i^\tau|-1)} GD(Giτ)=∣Viτ∣(∣Viτ∣−1)2∣Eiτ∣
针对传统方法忽略覆盖冗余导致能耗增加的问题,本文量化了重叠覆盖指标 Ψ ( G τ ∗ ) : \Psi(G_{\tau}^{*}): Ψ(Gτ∗):
Ψ ( G τ ∗ ) = ∑ i = 1 M max ( 0 , ∑ j = 1 ∣ G τ ∗ ∣ Γ 2 ( u i , j ) − 1 ) \Psi(G_\tau^*)=\sum_{i=1}^M\max\left(0,\sum_{j=1}^{|G_\tau^*|}\Gamma_2(u_{i,j})-1\right) Ψ(Gτ∗)=i=1∑Mmax 0,j=1∑∣Gτ∗∣Γ2(ui,j)−1
目标函数 F ( x ) F(x) F(x)协同优化服务覆盖率与重叠损耗:
max x F ( x ) = Γ ( G τ ∗ ) 1 + δ ⋅ Ψ ( G τ ∗ ) \max_xF(x)=\frac{\Gamma(G_\tau^*)}{1+\delta\cdot\Psi(G_\tau^*)} xmaxF(x)=1+δ⋅Ψ(Gτ∗)Γ(Gτ∗)
GBO算法构造伪梯度搜索规则(GSR),通过随机差分采样估计搜索方向:
G S R = r a n d n × ρ 1 × 2 Δ x ⋅ x n y p m − y q m + ϵ \mathrm{GSR} = \mathrm{randn} \times \rho_1 \times \frac{2\Delta x \cdot x_n}{y_p^m - y_q^m + \epsilon} GSR=randn×ρ1×ypm−yqm+ϵ2Δx⋅xn
其中, y p m , y q m y_p^m, y_q^m ypm,yqm 为扰动位置拟适应度评估。为平衡全局探索与局部开发,算法引入了方向性移动(DM)项引导节点向最优解 x b e s t x_{\mathrm{best}} xbest 演进:
D M = r a n d × ρ 2 × ( x b e s t − x n ) \mathrm{DM} = \mathrm{rand} \times \rho_2 \times (x_{\mathrm{best}} - x_n) DM=rand×ρ2×(xbest−xn)
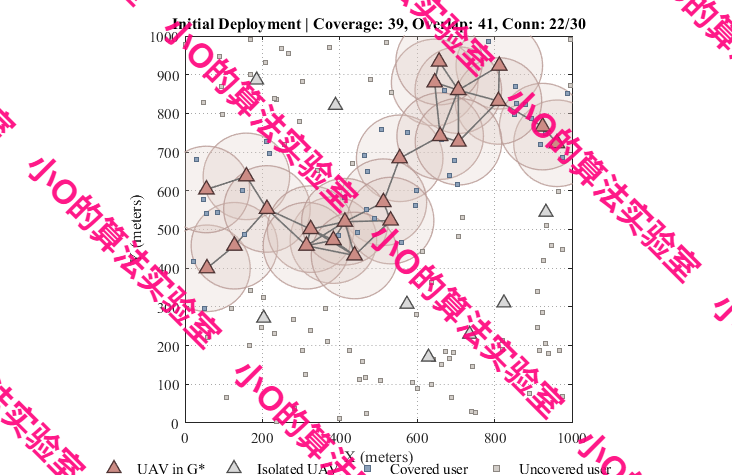
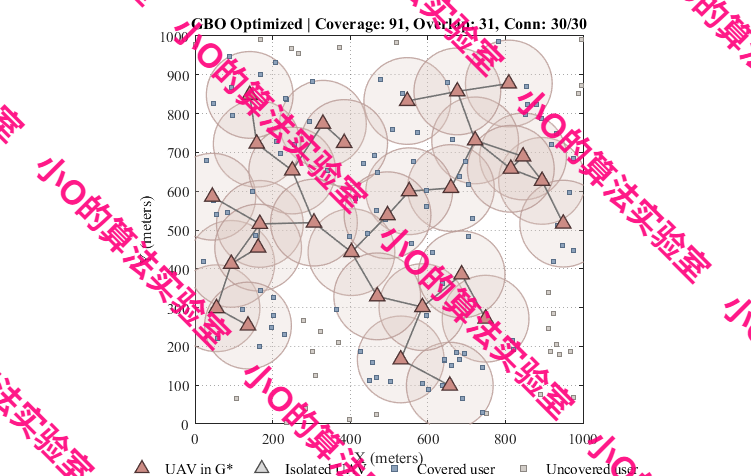
4.结果展示
5.参考文献
Teng F, Naouri A, Nouri N A, et al. Adaptive swarm intelligence optimization for Unmanned Aerial Vehicle-assisted edge computingJ. Swarm and Evolutionary Computation, 2026, 105: 102355.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx