C# 基于OpenCv的视觉工作流-章78-KRT测量
本章目标:
一、相机标定;
二、圆心查找;
三、距离计算;
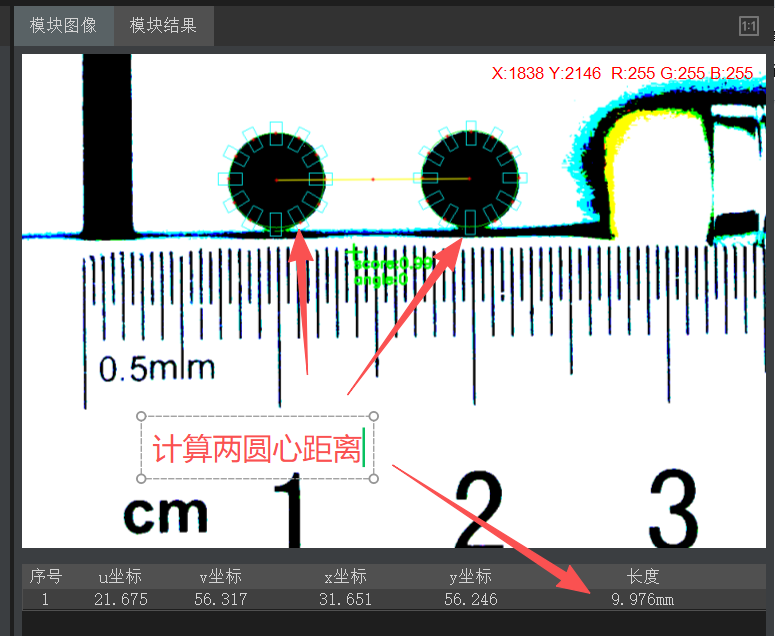
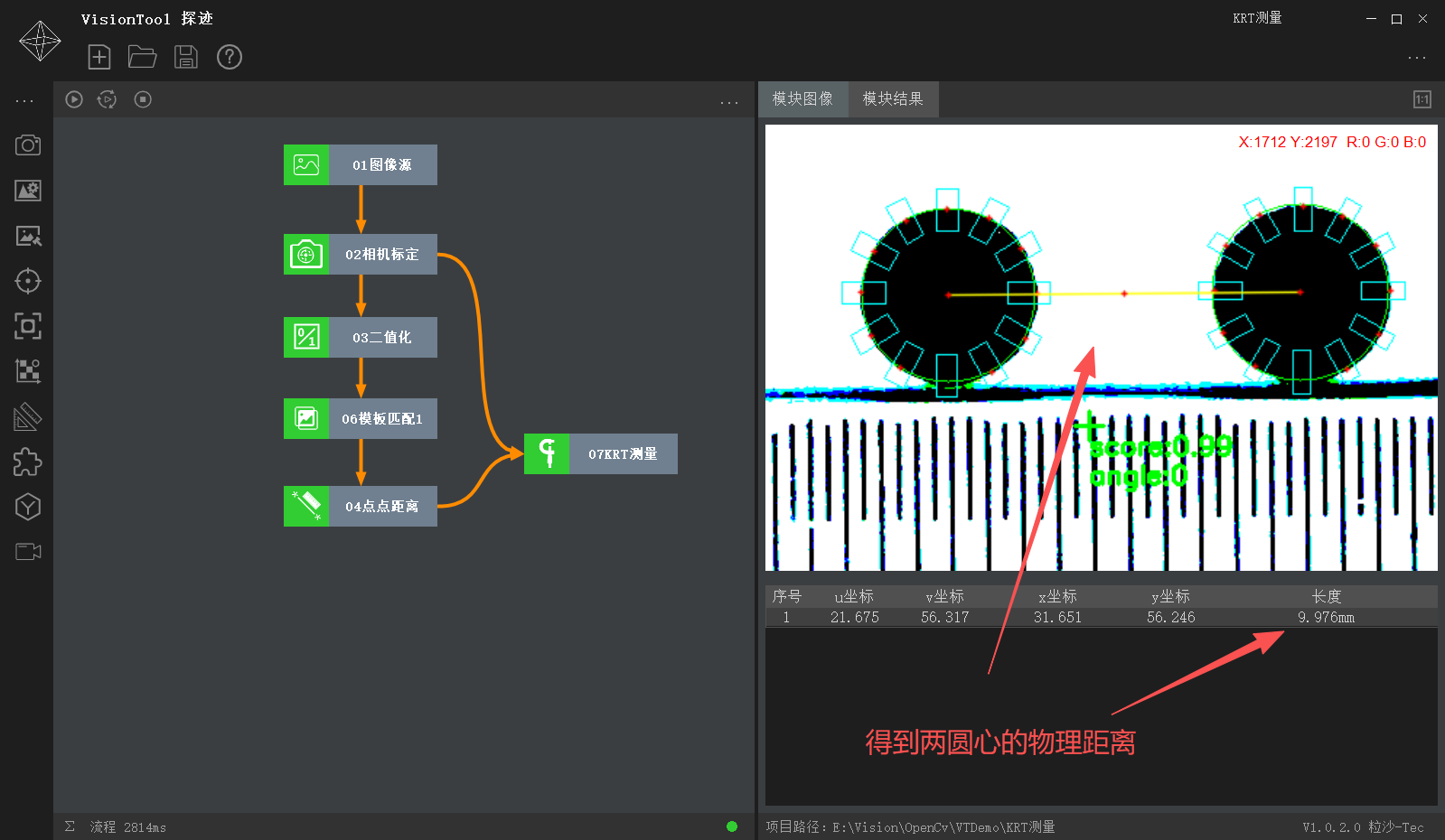
本章结合章58相机标定进行,先获取两圆心图像坐标,再结合理论公式,将图像坐标转为世界坐标再进行实际的距离测量。本模块结合模板匹配,可实现工件随意摆放,适合流水线中的全检测量场景。
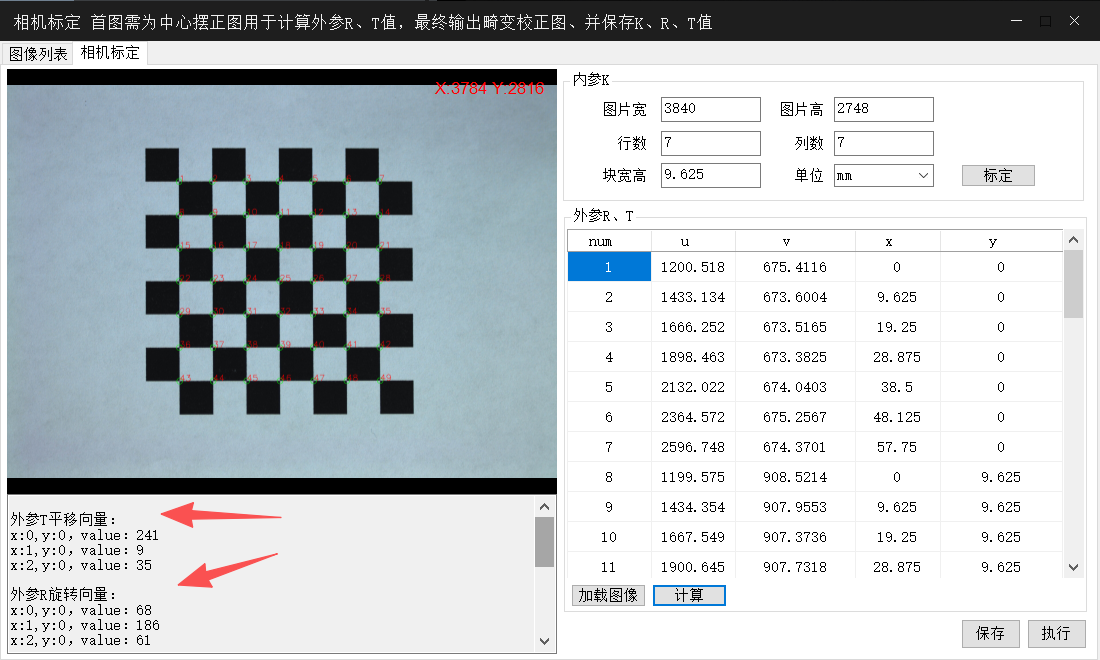
一、相机标定
使用相机标定模块,获取相机内参K,外参RT值。
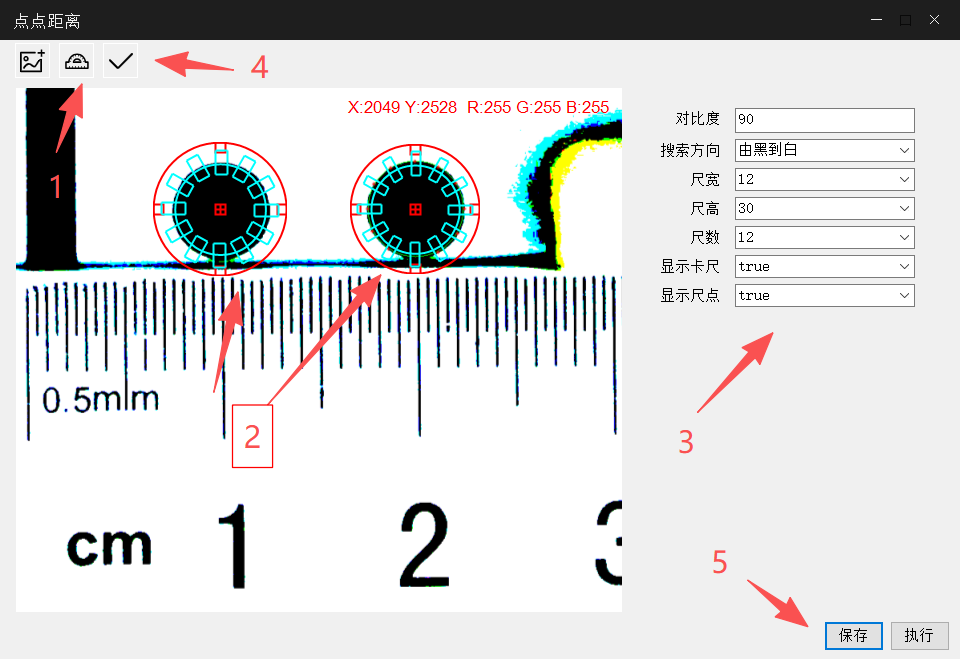
二、圆心查找
通过点点查找模块,取得两圆心坐标。
三、距离计算
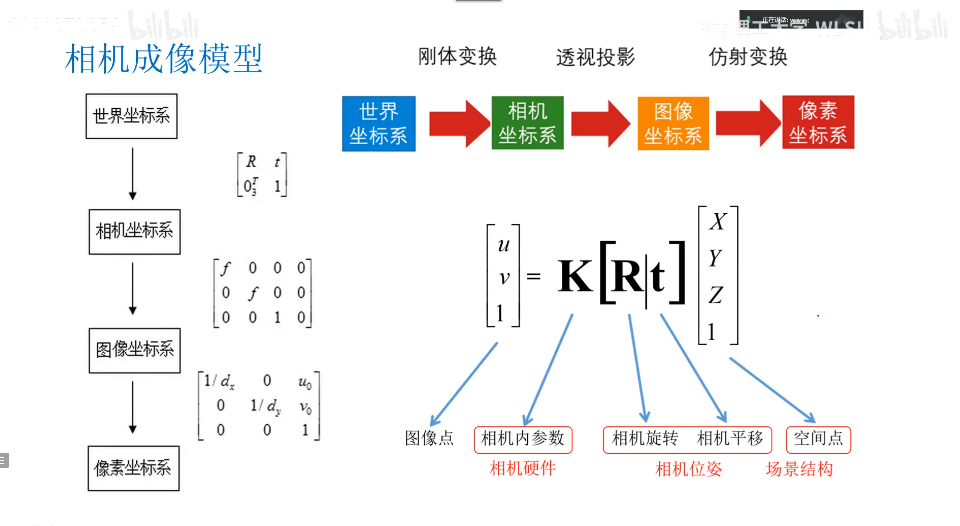
根据理论公式,已知KRT及图像坐标,可以求出世界坐标,进而计算出实际物理距离。
"VisionTool 探迹"免费视觉工具 自研
下载地址:https://pan.baidu.com/s/11tktKOSnepLNIEqNbvnv6w?pwd=qv5i
"VisionTool Halcon"付费视觉工具 (自研,淘宝可搜)
对应系列文章"C# 基于Halcon的视觉工作流",欢迎前往阅读。
上述内容需要一定的技术功底,本章至此已结束,欢迎阅读下章,谢谢!