大于15W。模块进入保护
中断: 单片机应对突发事件的一种方式
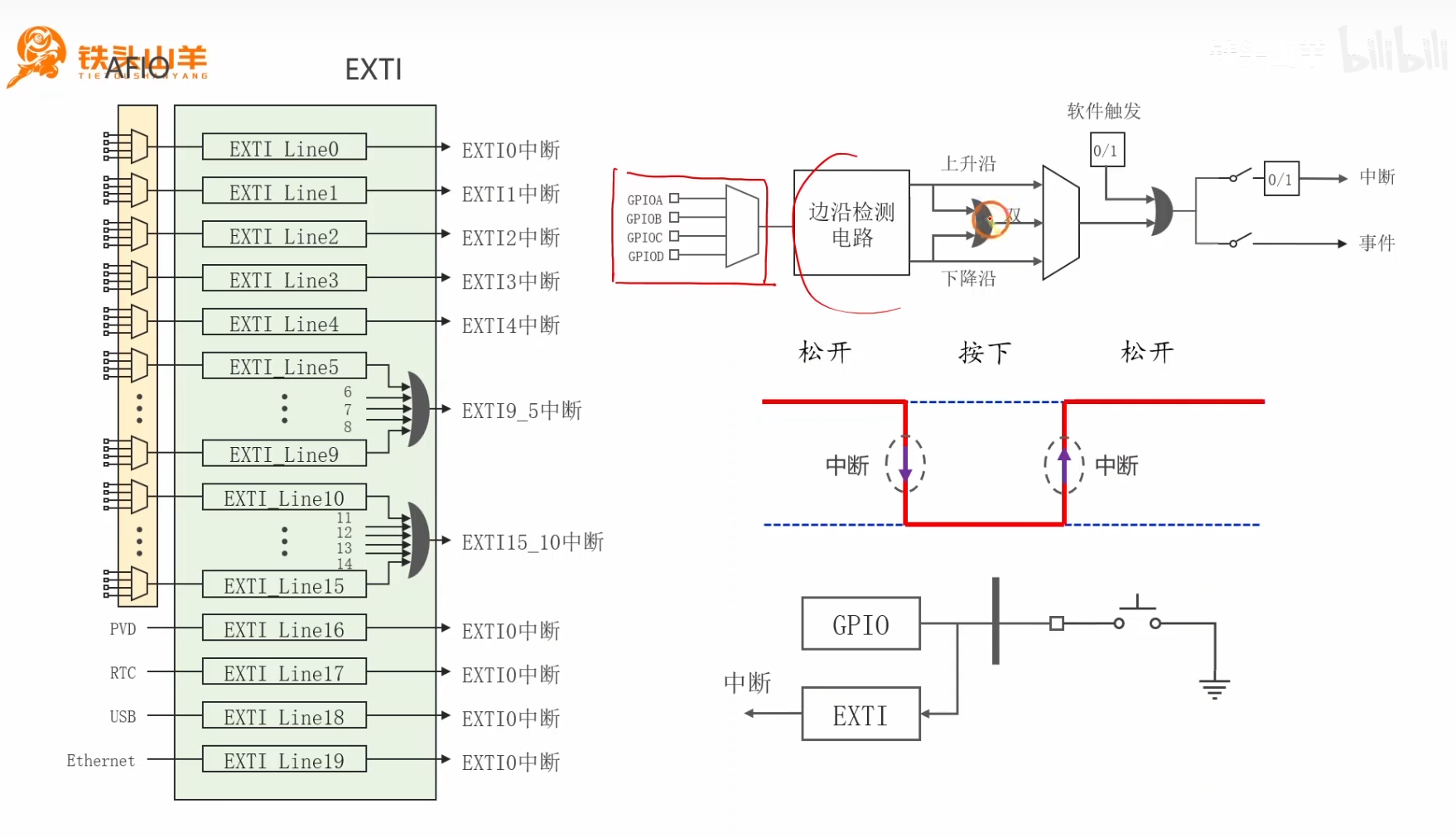
EXTI : external intterupt and event controller
片上外设
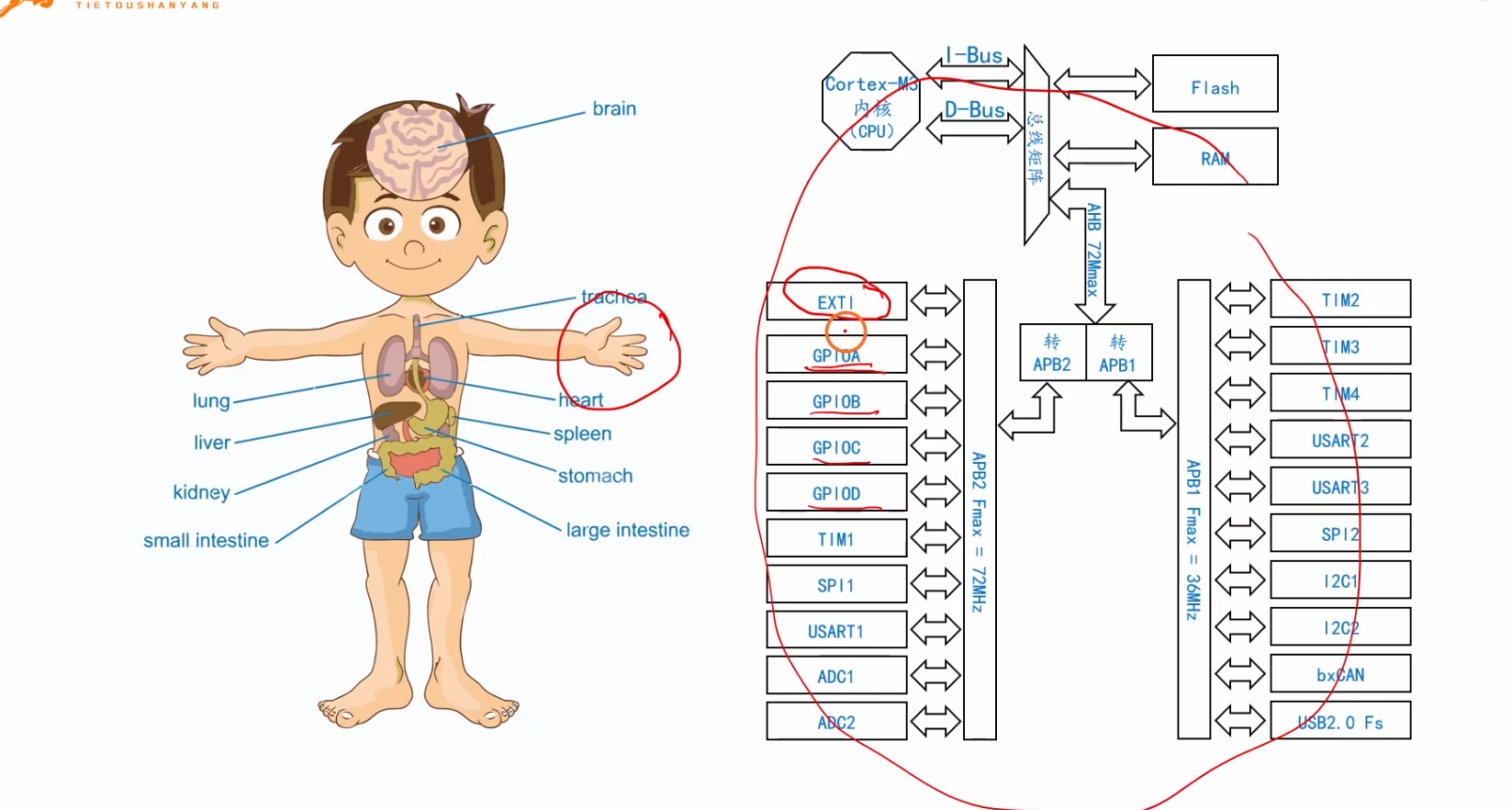
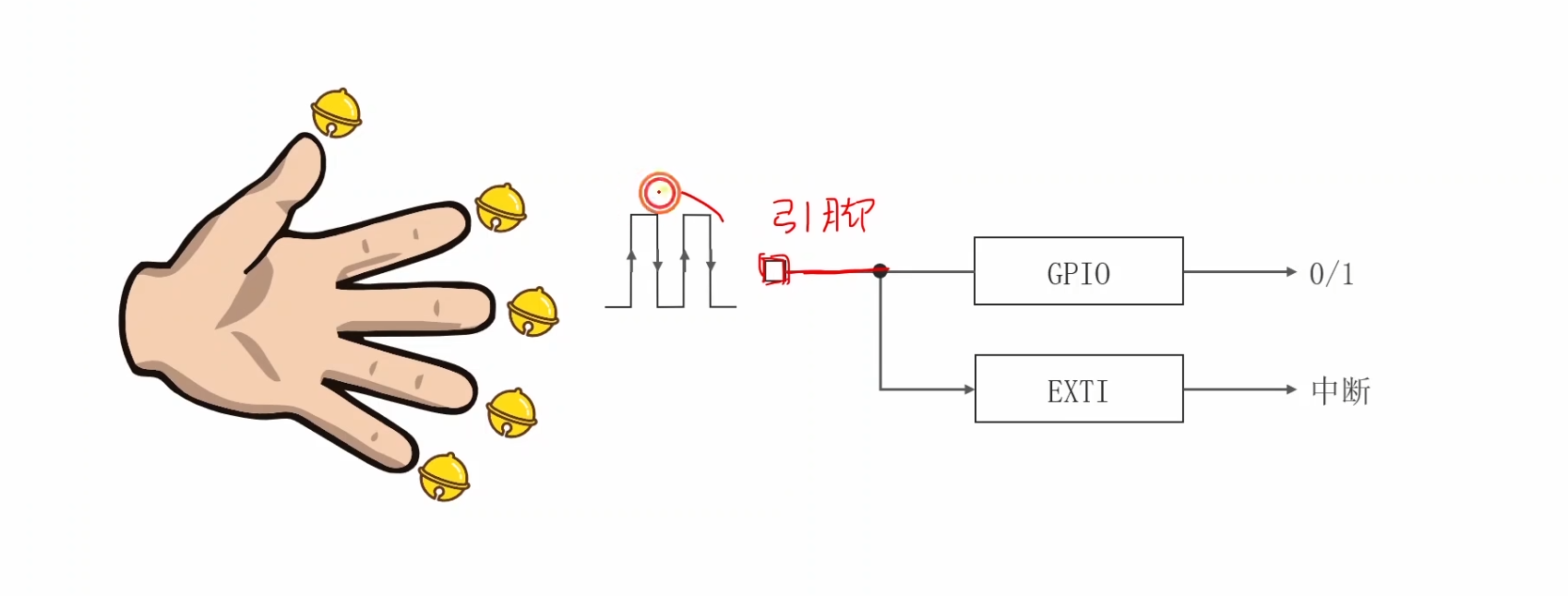
EXTI : 捕捉输入信号的变化,并产生中断
EXIT只有十六个,,,
GPIOA 有16个,,
EXIT只能选是GPIOA 还是 APIOB 或者其他GPIO,但是只能选一个
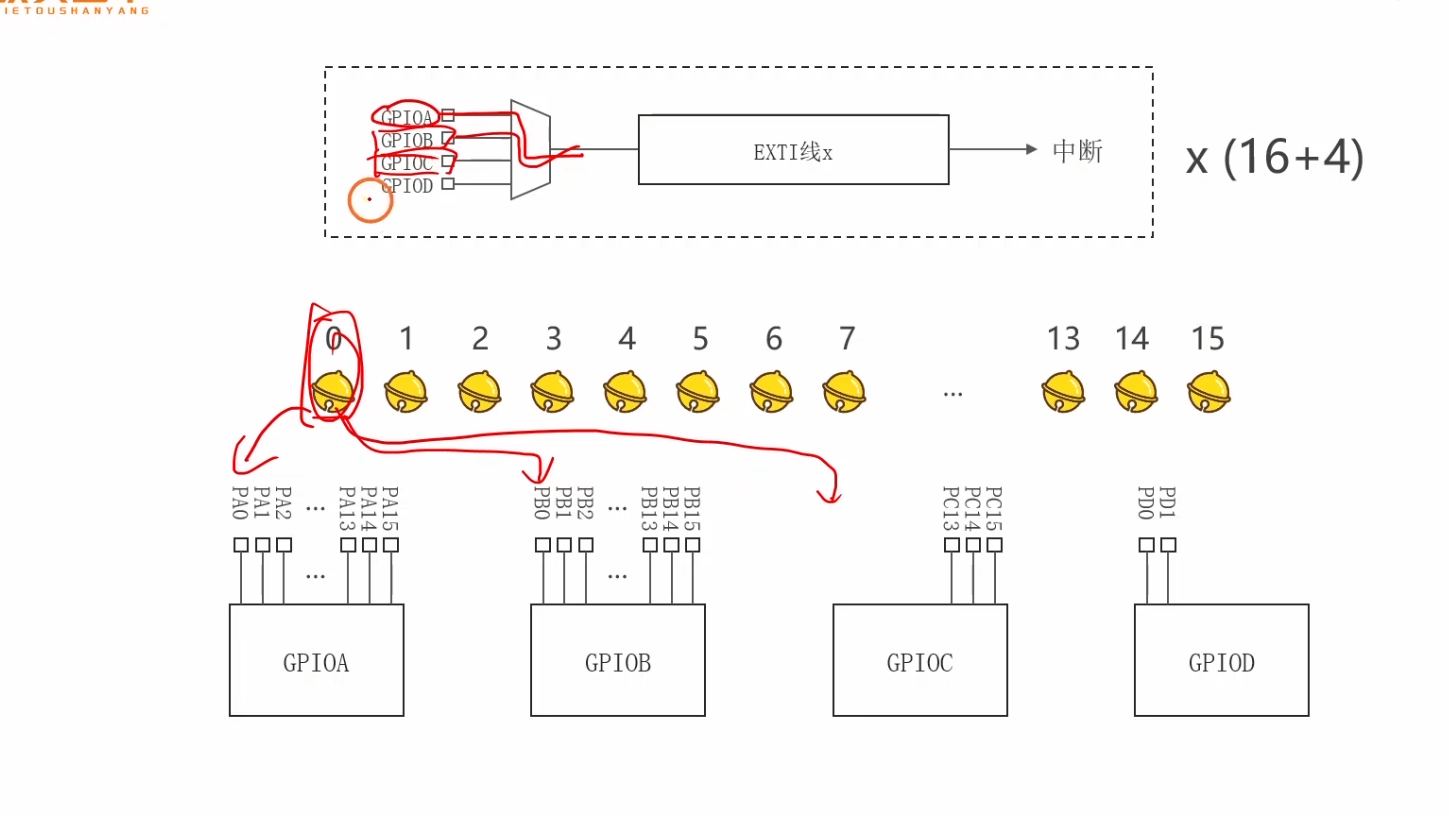
同一时刻,,PA0 和 PB0 和PC0和PD0,,只会有一个使用exit
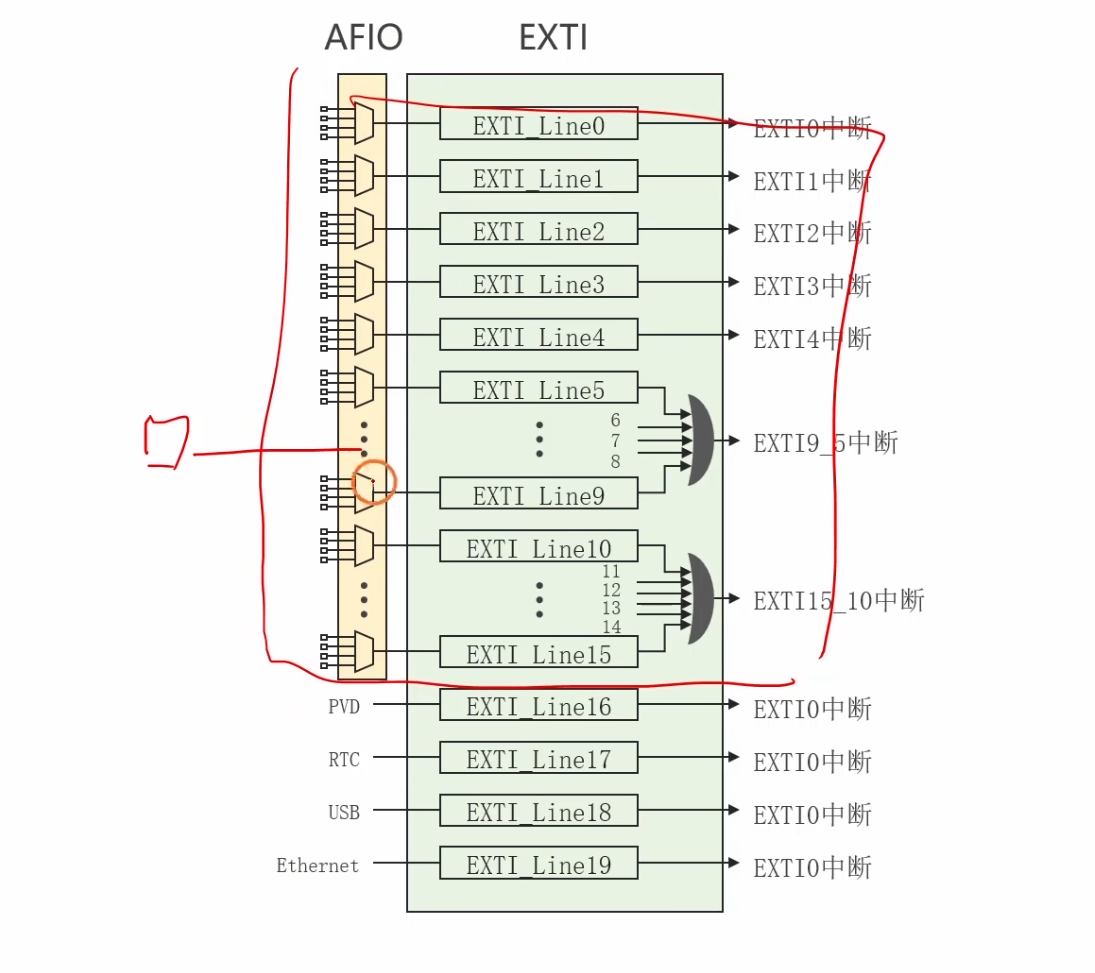
前面16个exit,是通过外部信号输入来中断的
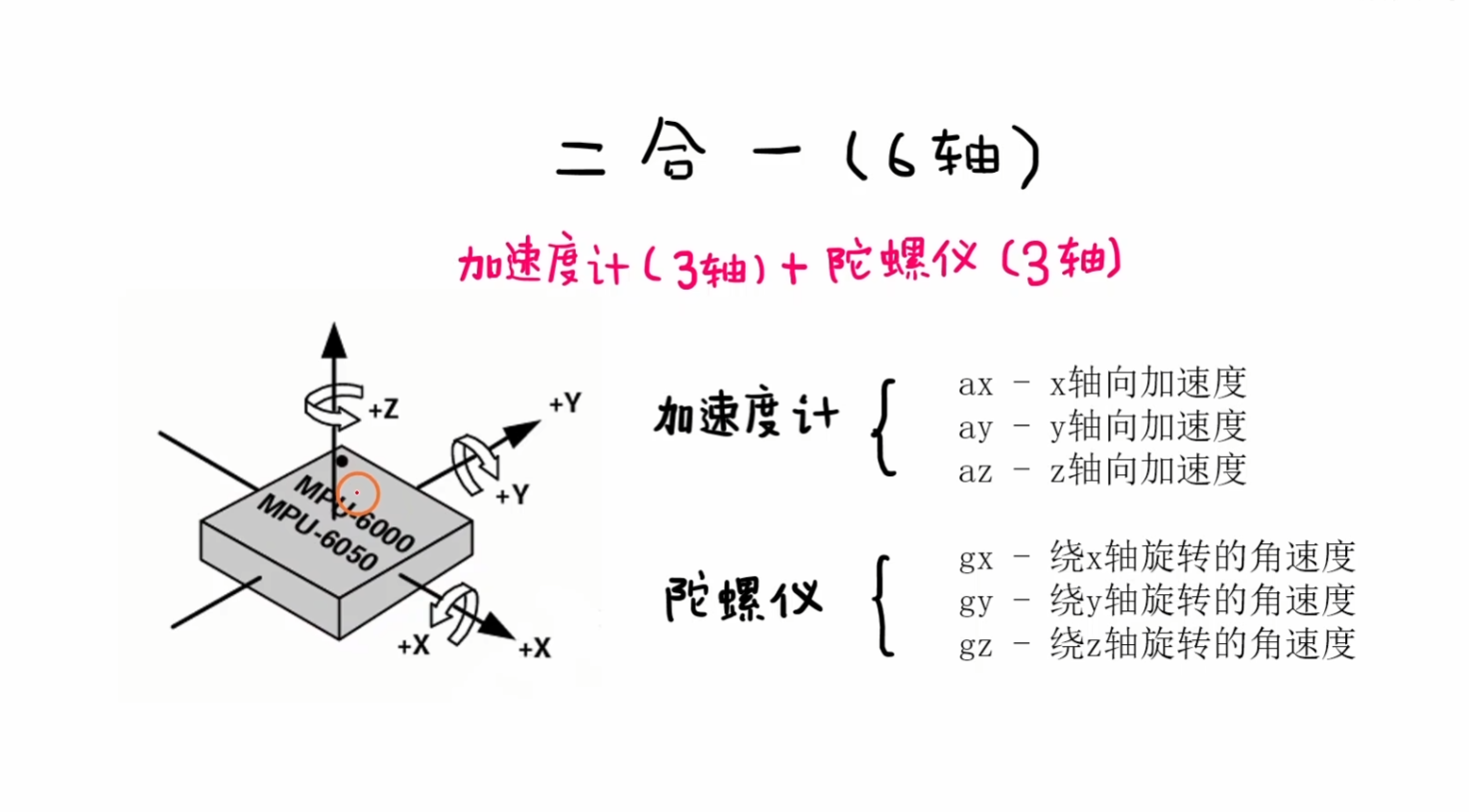
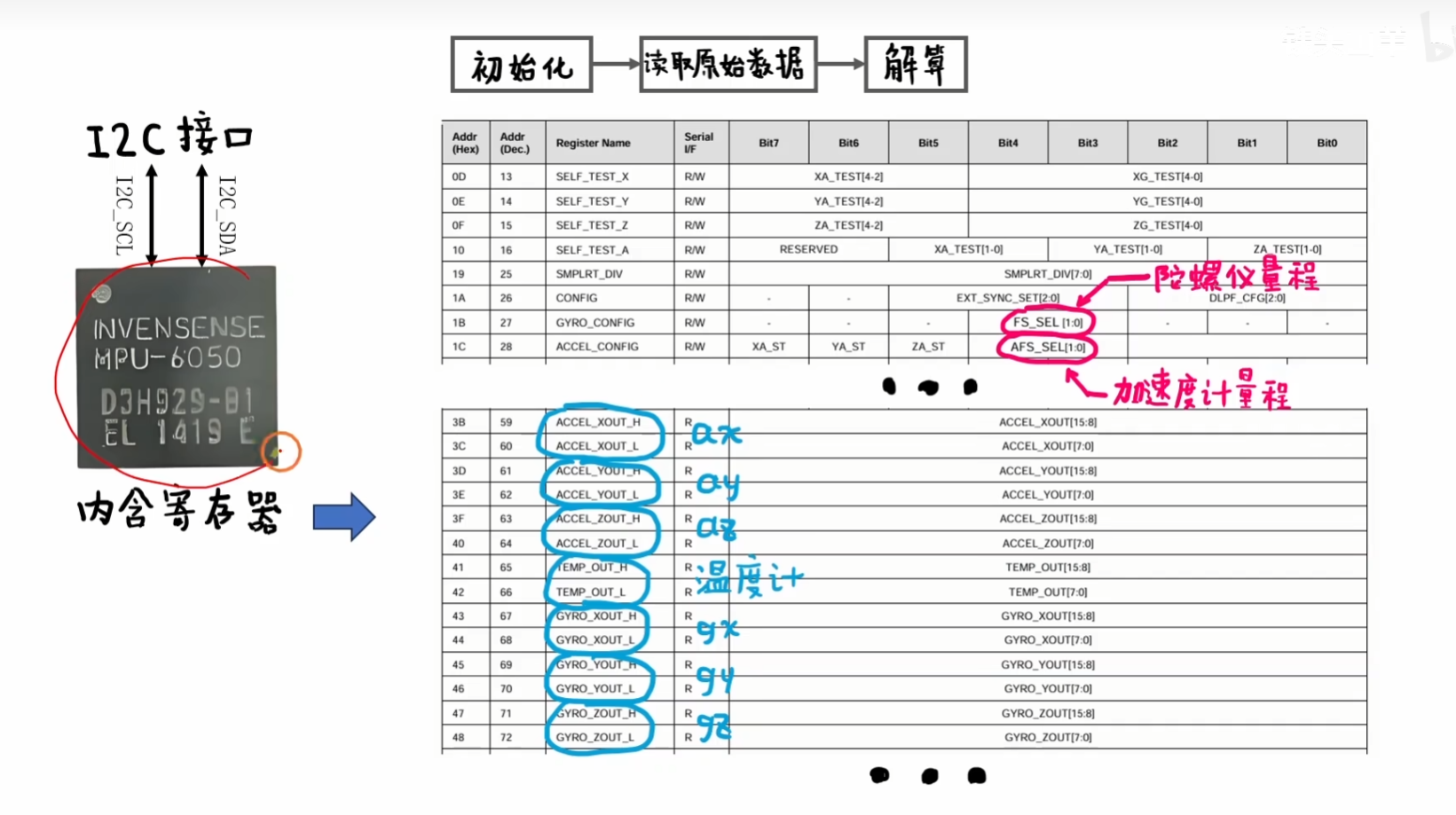
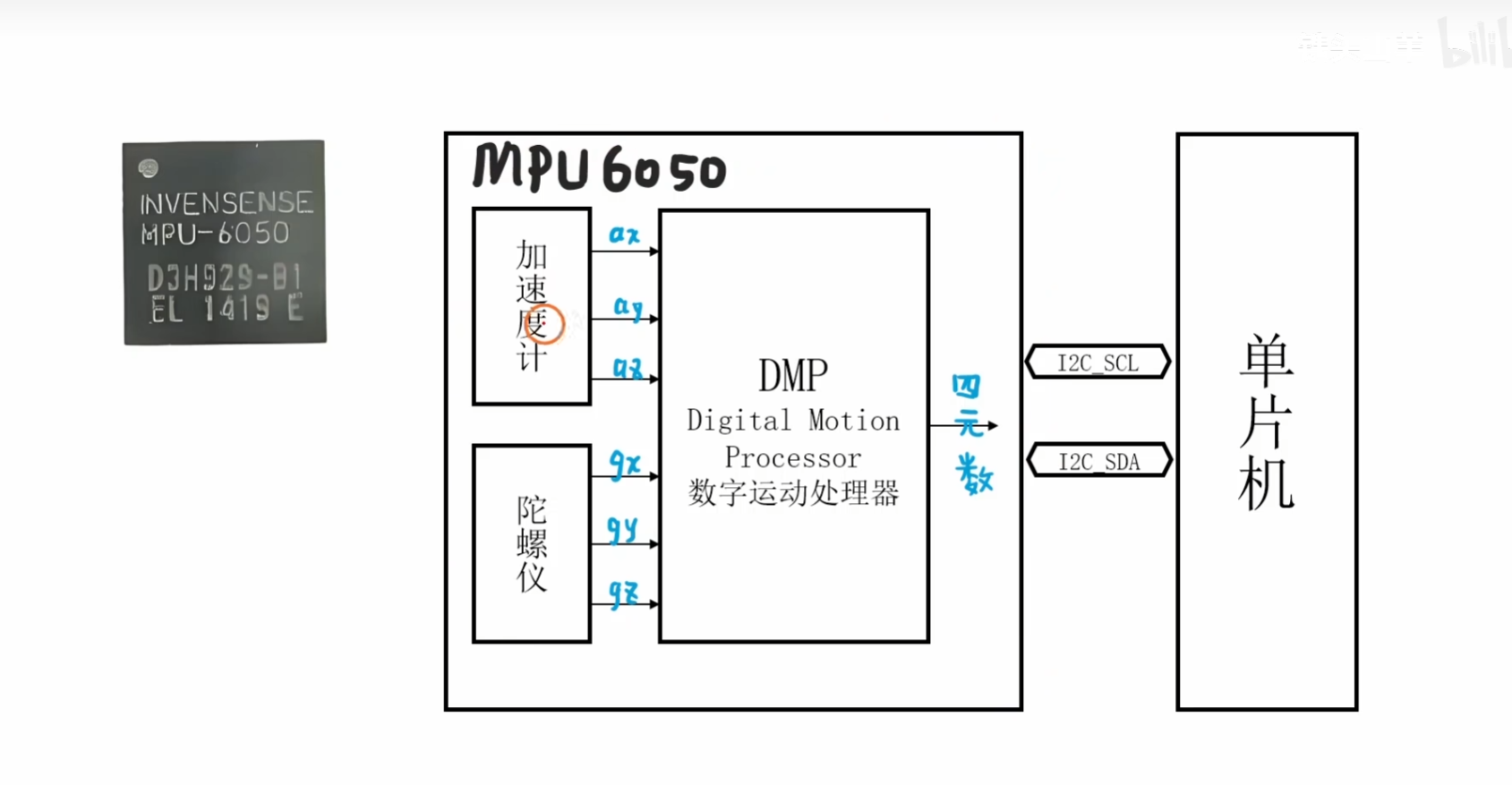
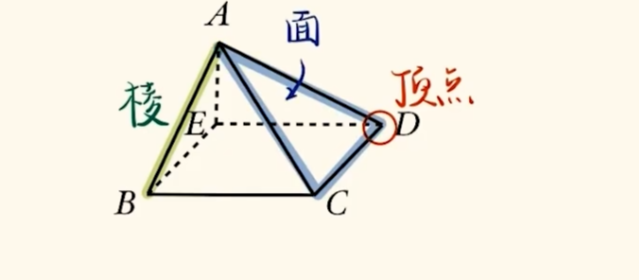
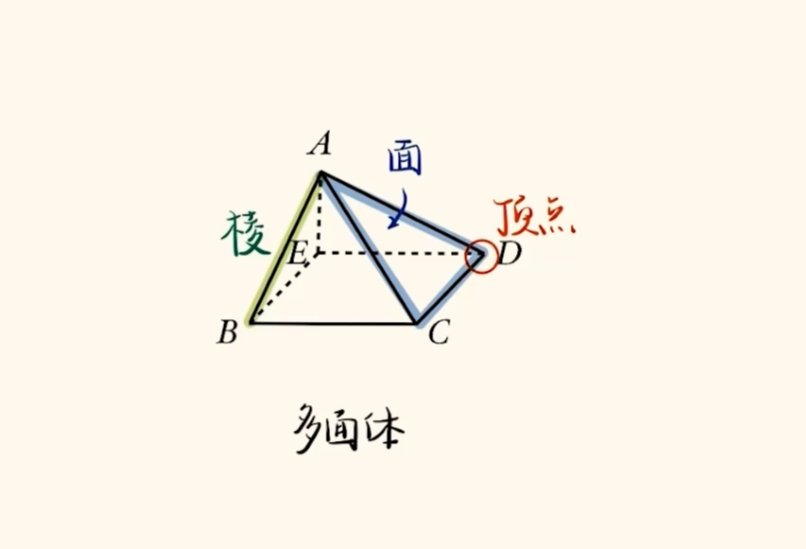
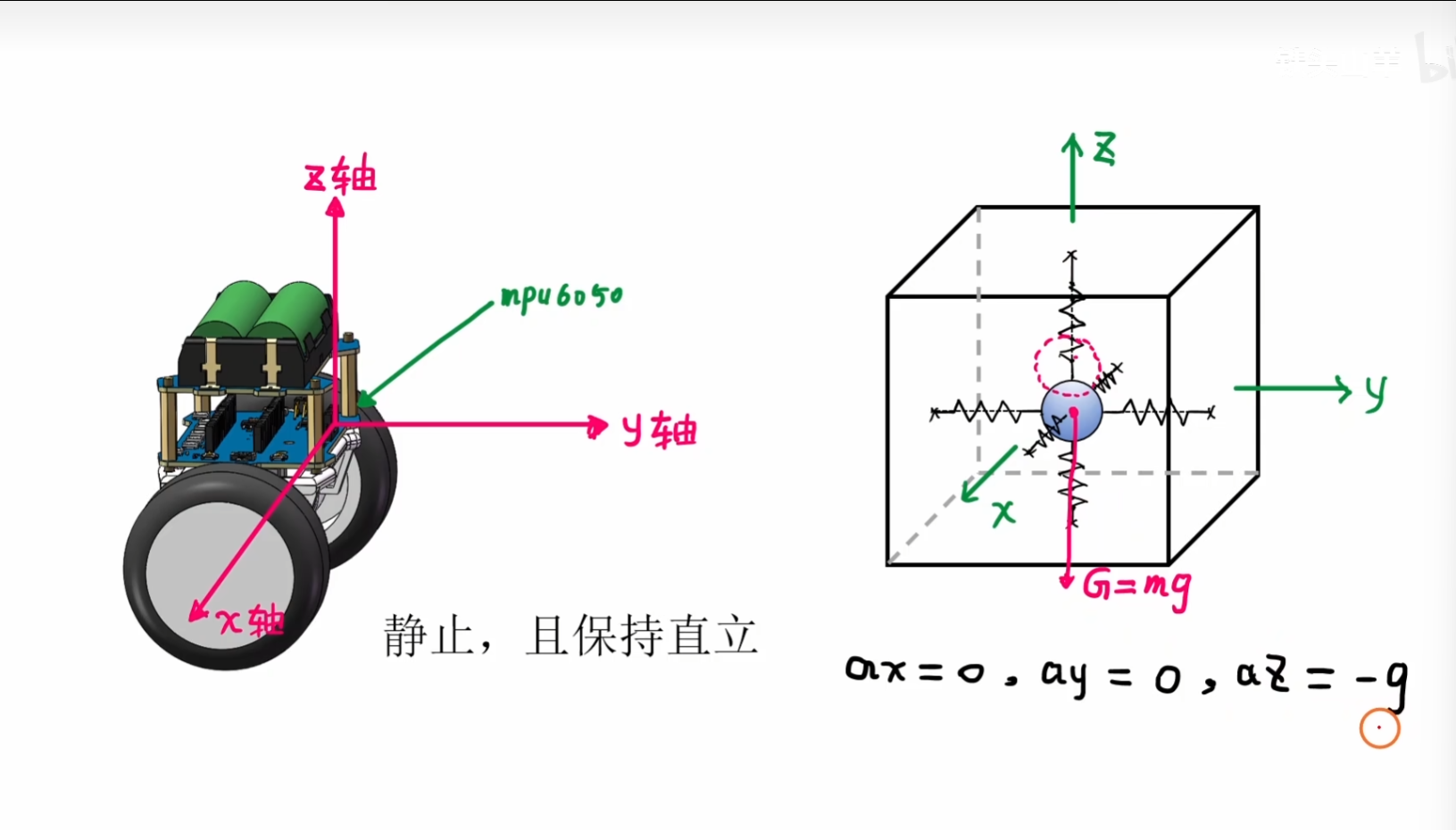
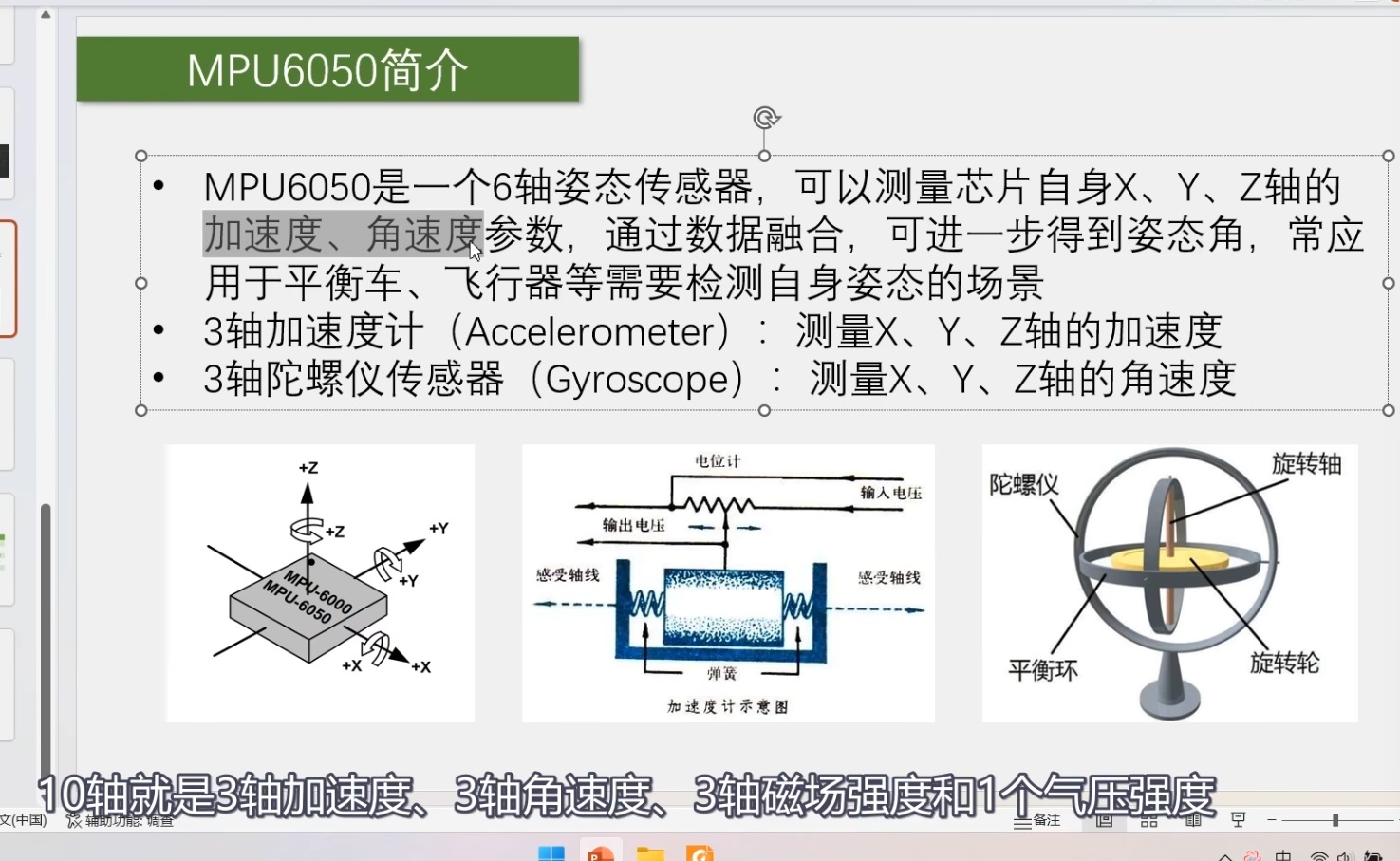
mpu6050
六轴姿态传感器
- 3轴加速度计 accelerometer
- 3轴陀螺仪 gyroscope
加速度计: x,y,z方向加速度
陀螺仪 : x,y,z方向角速度
角速度 =
弧长 / 时间 ===》 圆周运动的线速度
线速度的方向,,就是该点的切线方向
线速度 = 弧长 / 时间
角速度 = angular velocity =
角度的单位,,在国际制中是 弧度
rad / s
rad = 弧长 / 半径
周期: 旋转一周所用的时间 T ,,, s
频率 : 物体每秒转多少圈,,, Hz,,f
转速: 物体转动的圈数 / t ===》 60r / s 50r/min , 一分钟转多少圈,,一秒钟转多少圈
弧长/t =
(弧长/r)/t ===> 角速度 = 线速度 /r
线速度 = 角速度 * r
角速度 = 2PI / T
角速度 = 2PI * 频率
加速度 : 速度的变化快慢,,单位时间速度变化
偏航角
惯性是一种性质
质量越大,惯性越大
陀螺仪
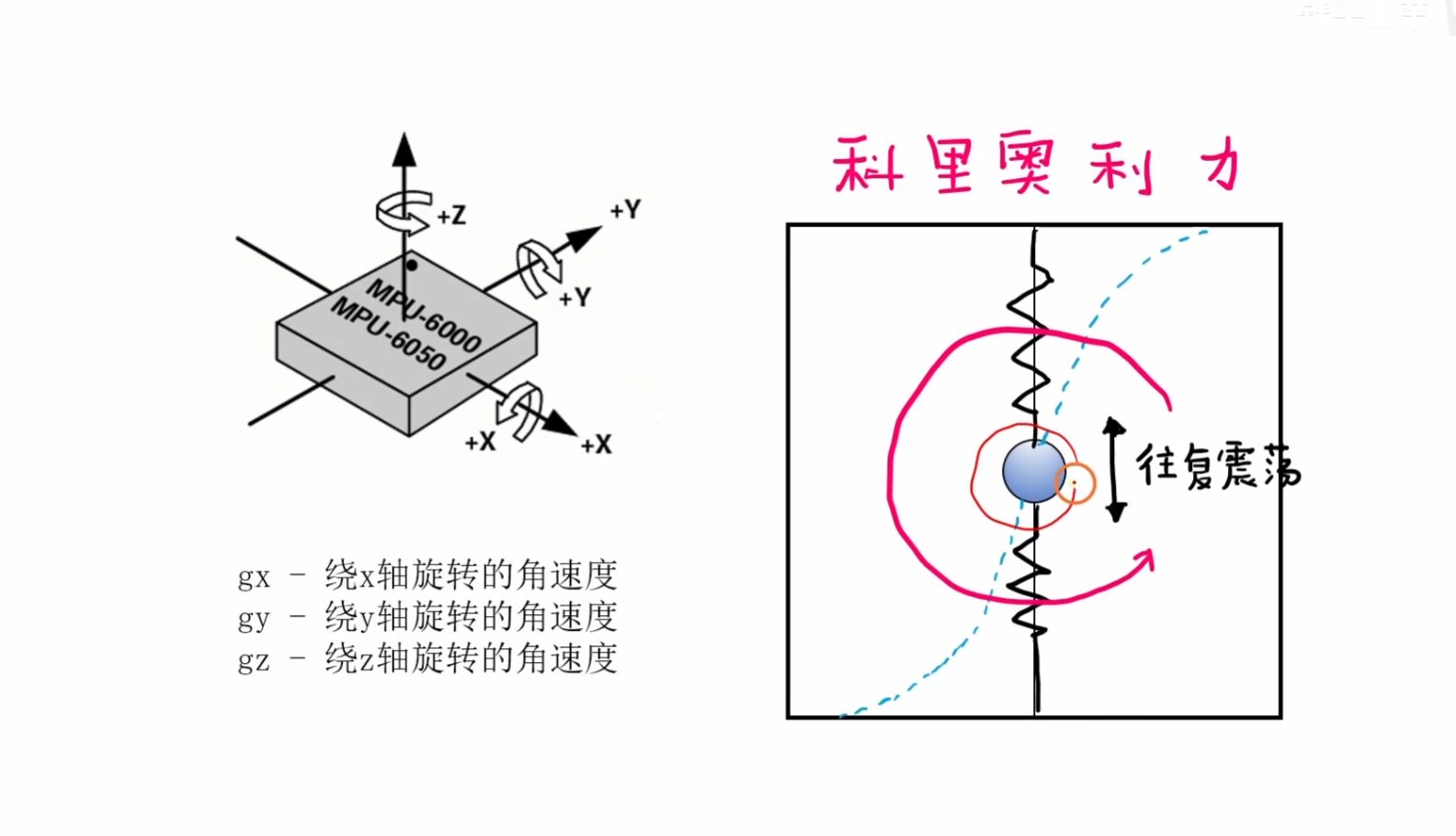
偏转的轨迹越大,,角速度越大,,通过偏转的轨迹,来计算角速度
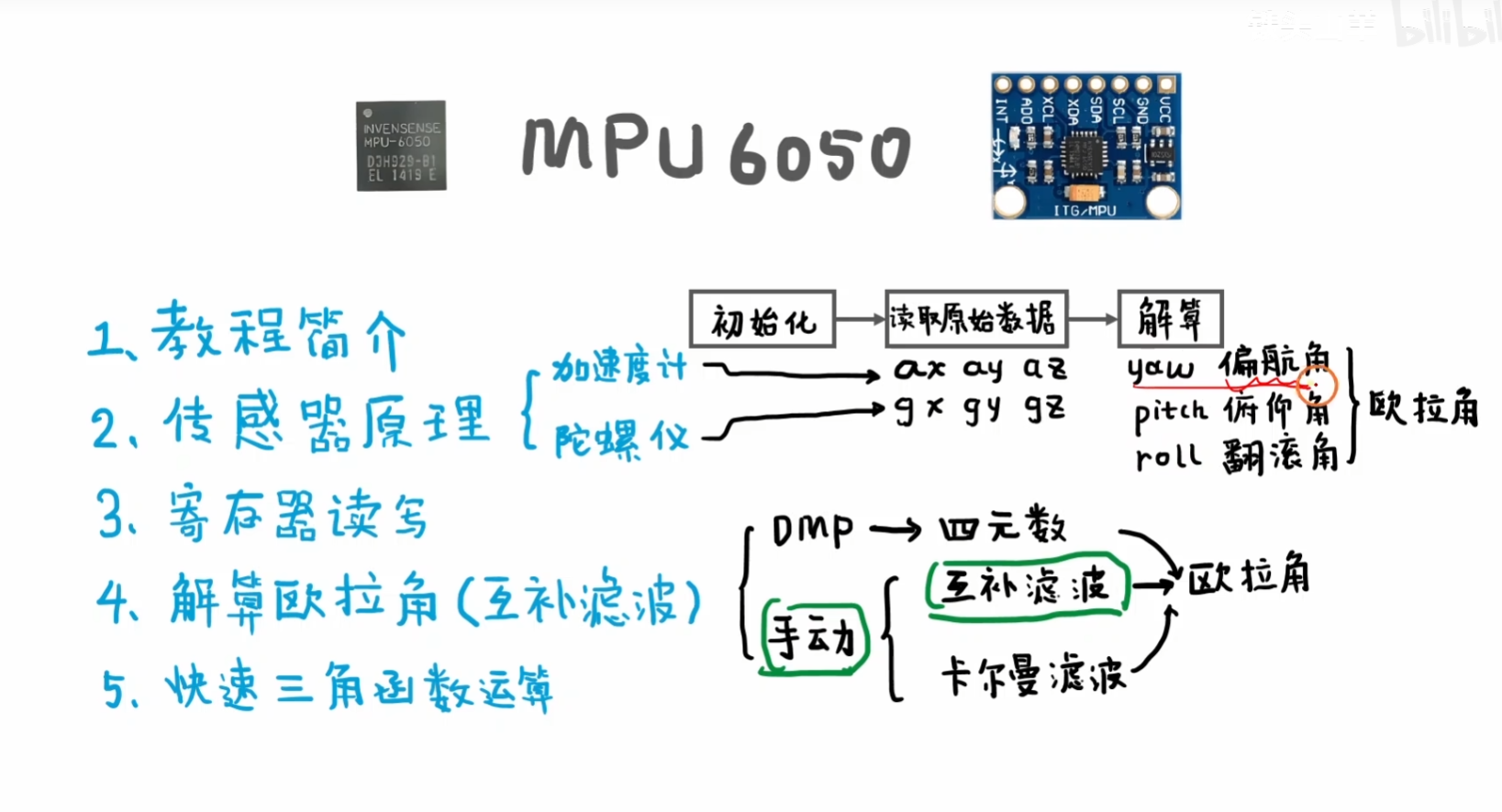
姿态角 ===》 欧拉角
欧拉角: 飞机机身 相对于 初始三个轴的夹角
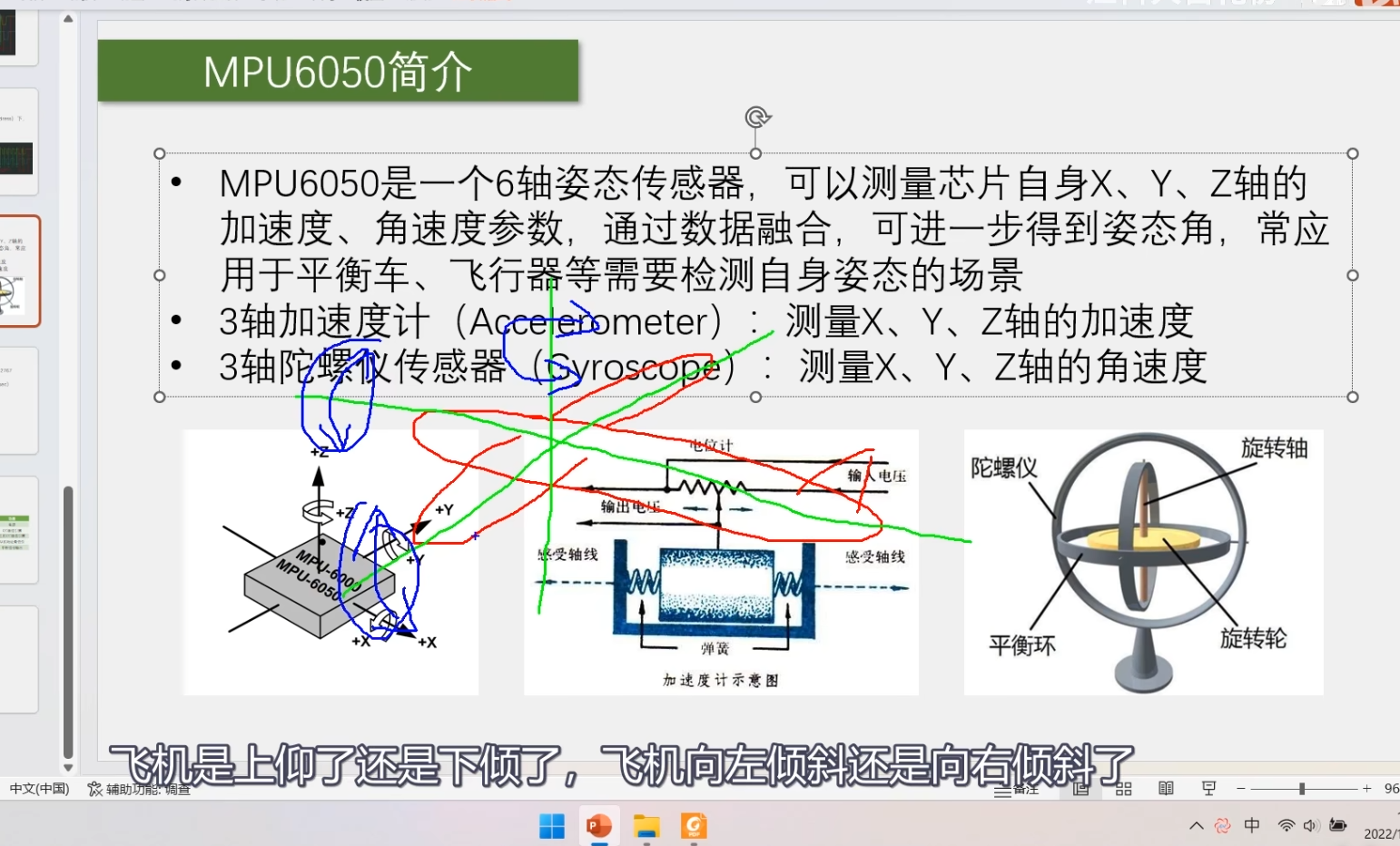
欧拉角: 飞机此时的姿态,,,是上仰的还是下倾的,,,飞机向左倾斜还是向右倾斜
飞控算法
数据融合,综合多种数据,得到一个相对稳定的欧拉角
常见的数据融合算法 :
- 互补滤波
- 卡尔曼滤波
惯性导航领域 ===》 姿态解算
加速度计 : accelerometer
陀螺仪: gyroscope : 陀螺仪
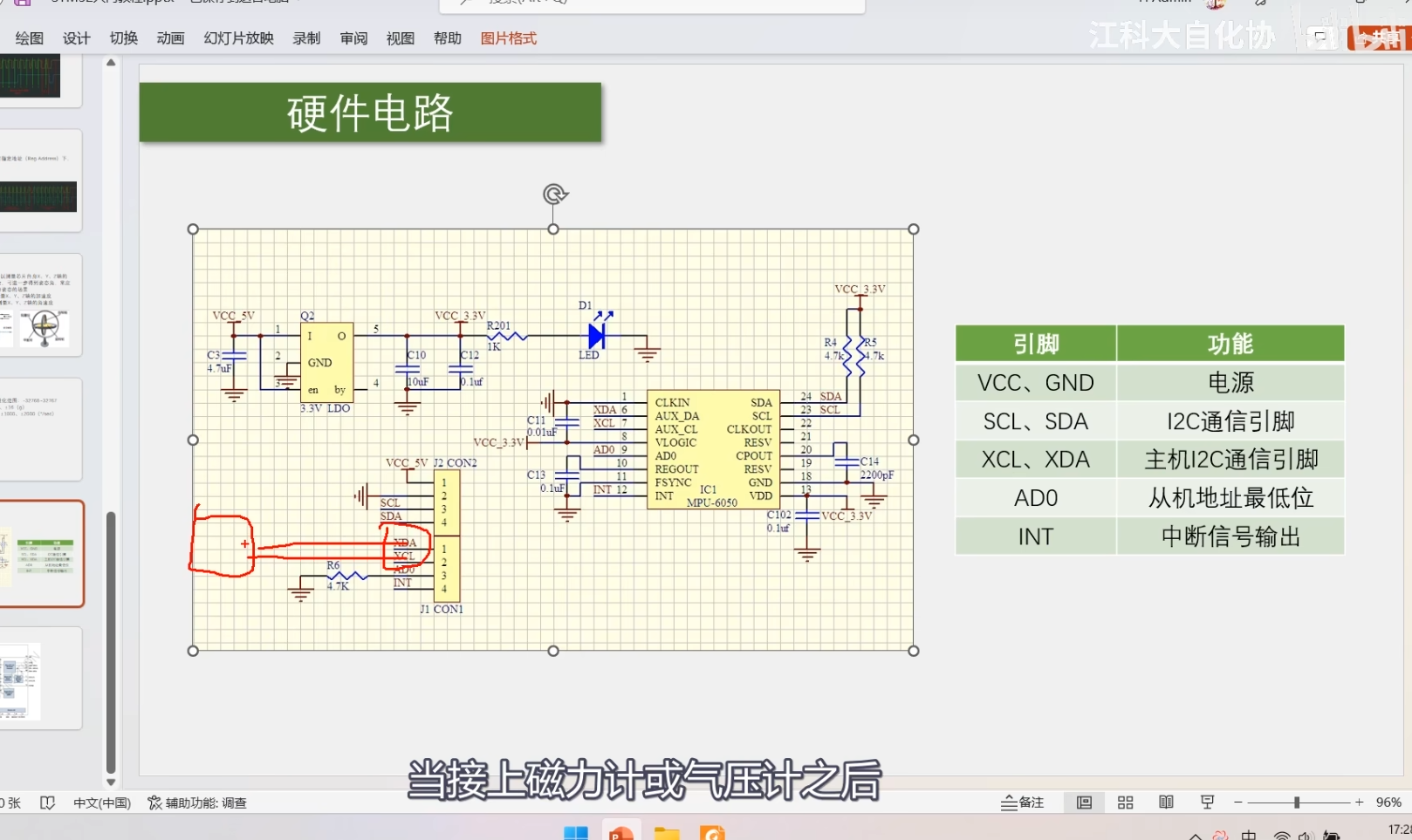
XCL。。XDA 外接气压计或者磁力计