从PointNet到PointPillars:如何让自动驾驶汽车"实时"看见3D世界?
作者:小探
首发:探物 AI
序列:3D感知网络的第2篇文章
转载请注明出处
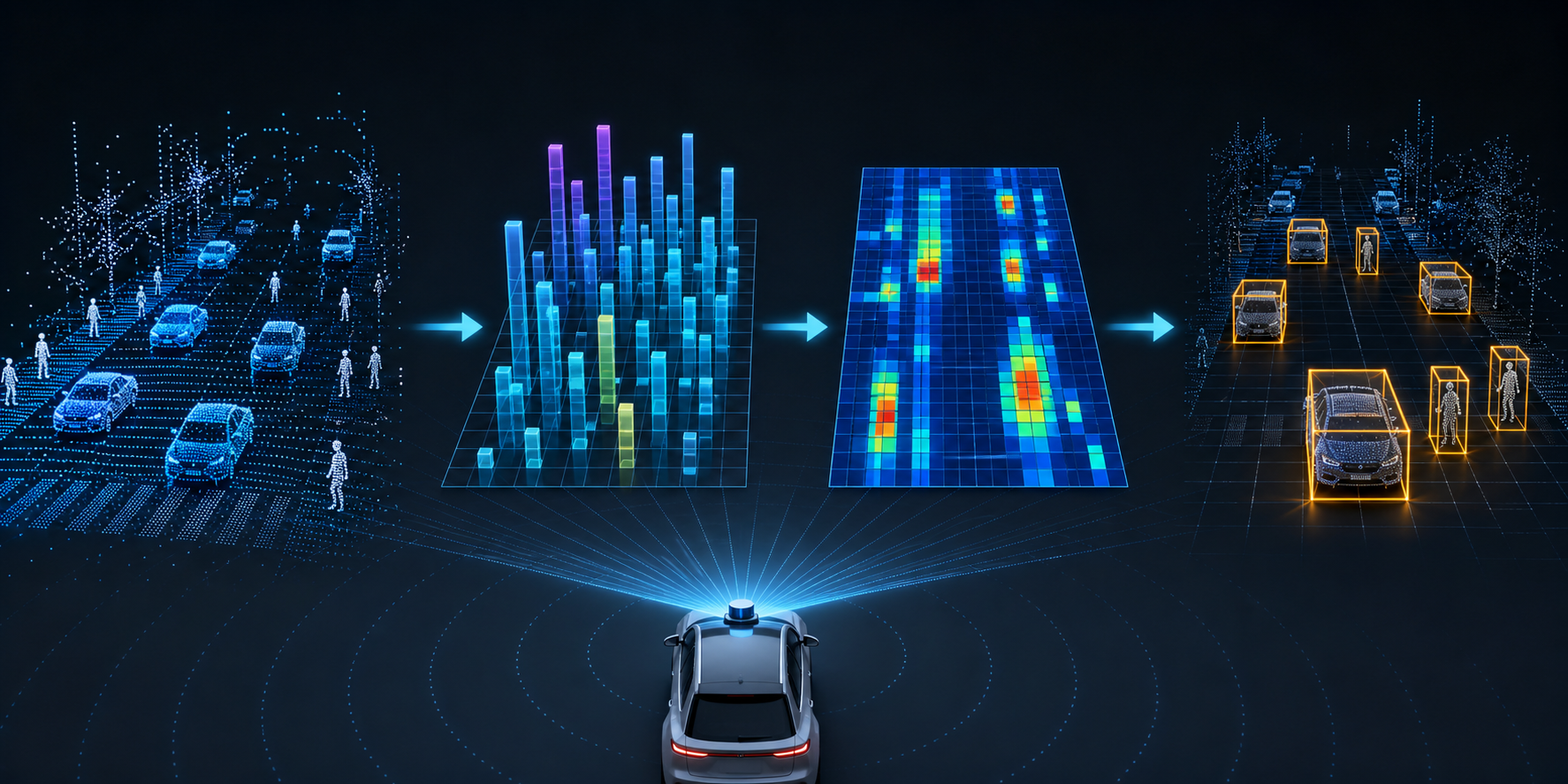
上一篇我们学习了PointNet,理解了如何用深度学习直接处理无序点云。但PointNet主要用于分类和分割,离"实时检测周围的车辆"还有距离。这一篇我们来看PointPillars------一个能让自动驾驶汽车以62 FPS实时检测3D目标的网络,真正能让工业使用的网络。
一、从PointNet到3D目标检测(先搞清楚问题)
1.1 PointNet解决了什么?
PointNet的贡献:
✅ 直接处理无序点云
✅ 学习全局特征
✅ 端到端训练
PointNet没解决的:
❌ 只有全局特征,缺乏局部特征
❌ 无法定位物体在3D空间中的位置
❌ 不能做实时推理(太慢)1.2 3D目标检测要做什么?
输入:一堆3D点(激光雷达扫描)
输出:每个物体的3D边界框
具体来说:
┌─────────────────────────────────────────┐
│ 输出: │
│ - 物体类别(车、行人、自行车) │
│ - 3D位置 (x, y, z) │
│ - 3D尺寸 (长, 宽, 高) │
│ - 朝向角 (yaw) │
│ - 置信度 │
└─────────────────────────────────────────┘直观理解:
激光雷达扫描一圈:
* * *
* * * * * ← 车的点云
* * * * * * *
* * * ← 行人的点云
* * *
*
网络要做的:
1. 哪些点属于车?→ 画一个3D框
2. 哪些点属于行人?→ 画另一个3D框
3. 每个框的位置、大小、朝向是什么?1.3 为什么不能直接用PointNet做检测?
PointNet的问题:
1. 全局特征 → 只知道"这是什么",不知道"在哪里"
- max pooling把所有点的信息压缩成一个向量
- 丢失了空间位置信息
2. 没有局部特征 → 无法区分不同物体
- 车和行人的点混在一起
- PointNet会把它们混为一谈
3. 计算量大 → 无法实时
- 自动驾驶需要 ≥30 FPS
- PointNet处理一帧要几百毫秒1.4 3D检测的发展路线
PointNet (2017)
│ 直接处理点云,但只能分类/分割
↓
PointNet++ (2017)
│ 加入局部特征,层次化学习
↓
VoxelNet (2018)
│ 把点云转成体素,用3D卷积
│ 效果好,但太慢(~2 FPS)
↓
SECOND (2018)
│ 用稀疏卷积加速VoxelNet
│ 速度提升,但还是不够快
↓
PointPillars (2019)
│ 用"柱子"代替体素,2D卷积处理
│ 62 FPS!实时!
↓
自动驾驶实际部署二、PointPillars的核心思想(最重要的部分)
2.1 一句话概括
把3D点云按柱子(Pillar)分组,编码成2D伪图像,然后用成熟的2D检测网络做目标检测。
2.2 为什么叫"PointPillars"?
Pillar = 柱子
把3D空间沿Z轴切成一根根"柱子":
俯视图(XY平面):
┌───┬───┬───┬───┬───┐
│ │ P │ │ P │ │ P = Pillar(柱子)
├───┼───┼───┼───┼───┤
│ P │ P │ P │ │ P │ 每个柱子沿Z轴延伸
├───┼───┼───┼───┼───┤ 柱子内的所有点归为一组
│ │ │ P │ P │ │
├───┼───┼───┼───┼───┤
│ │ P │ │ │ P │
└───┴───┴───┴───┴───┘
侧视图(XZ平面):
┃ ┃
┃ ┃ ← 柱子沿Z轴延伸
┃ ┃
━━━━┻━━━━━┻━━━━ ← 地面2.3 PointPillars的三大步骤
步骤1:点云 → 柱子(Pillarization)
把点云按照XY平面划分成网格,每个格子是一根柱子
步骤2:柱子 → 伪图像(Pseudo Image)
对每根柱子内的点提取特征,编码成一个2D特征图
步骤3:伪图像 → 3D检测框(Detection)
用2D卷积网络(类似YOLO)检测,输出3D边界框图解整体流程:
输入点云 [N×4]
(N个点,每个点有x,y,z,intensity)
│
↓
┌─────────────────────────────────────┐
│ 步骤1:柱子化(Pillarization) │
│ │
│ - XY平面划分网格(如0.16m×0.16m) │
│ - 每个网格是一根柱子 │
│ - 点按XY坐标分配到对应柱子 │
└─────────────────────────────────────┘
│
↓
┌─────────────────────────────────────┐
│ 步骤2:柱子特征编码(Pillar Encoder)│
│ │
│ - 每根柱子内的点用简化PointNet处理 │
│ - 提取柱子级特征 │
│ - 映射到2D网格 → 伪图像 │
└─────────────────────────────────────┘
│
↓
伪图像 [C×H×W]
(通道×高度×宽度)
│
↓
┌─────────────────────────────────────┐
│ 步骤3:2D检测网络(Detection Head) │
│ │
│ - 类似YOLO的2D卷积骨干网络 │
│ - 特征金字塔(FPN)多尺度检测 │
│ - 输出:类别 + 2D框 + 高度 + 朝向 │
└─────────────────────────────────────┘
│
↓
3D检测结果:
- 类别:车辆/行人/自行车
- 位置:(x, y, z)
- 尺寸:(长, 宽, 高)
- 朝向:yaw角2.4 为什么这样做很快?
对比其他方法:
VoxelNet:
3D体素 → 3D卷积 → 检测
问题:3D卷积计算量巨大
SECOND:
3D体素 → 稀疏3D卷积 → 检测
改进:稀疏卷积减少计算
问题:实现复杂,仍有3D卷积
PointPillars:
柱子 → 2D特征图 → 2D卷积 → 检测
优势:完全避免3D卷积!
2D卷积有高度优化的实现(cuDNN)
可以直接用成熟的2D检测框架
速度对比:
┌──────────────┬──────────┬──────────┐
│ 方法 │ FPS │ 3D卷积? │
├──────────────┼──────────┼──────────┤
│ VoxelNet │ ~2 │ 是 │
│ SECOND │ ~20 │ 稀疏 │
│ PointPillars │ ~62 │ 否! │
└──────────────┴──────────┴──────────┘三、PointPillars的网络结构详解
3.1 步骤1:柱子化(Pillarization)
核心操作:把点云按XY坐标分配到网格中
python
def pillarize(point_cloud, x_range, y_range, pillar_size):
"""
将点云分配到柱子中
参数:
point_cloud: [N, 4] - N个点,每个点(x,y,z,intensity)
x_range: (x_min, x_max) - X方向范围
y_range: (y_min, y_max) - Y方向范围
pillar_size: (dx, dy) - 每个柱子的XY尺寸
返回:
pillars: 每个柱子内的点列表
"""
x_min, x_max = x_range
y_min, y_max = y_range
dx, dy = pillar_size
# 计算网格数量
x_bins = int((x_max - x_min) / dx) # 例如 432
y_bins = int((y_max - y_min) / dy) # 例如 496
# 计算每个点属于哪个柱子
x_idx = ((point_cloud[:, 0] - x_min) / dx).astype(int)
y_idx = ((point_cloud[:, 1] - y_min) / dy).astype(int)
# 过滤超出范围的点
valid = (x_idx >= 0) & (x_idx < x_bins) & \
(y_idx >= 0) & (y_idx < y_bins)
# 按柱子分组
pillars = {}
for i in range(len(point_cloud)):
if valid[i]:
key = (x_idx[i], y_idx[i])
if key not in pillars:
pillars[key] = []
pillars[key].append(point_cloud[i])
return pillars, (x_bins, y_bins)图解:
原始点云: 柱子化后:
* * ┌───┬───┬───┐
* * │P0 │P1 │ │
* * * → ├───┼───┼───┤
* * │P2 │P3 │P4 │
* * ├───┼───┼───┤
│ │P5 │ │
└───┴───┴───┘
P0 = [点A, 点B] ← 柱子0内的所有点
P1 = [点C, 点D, 点E]
...3.2 步骤2:柱子特征编码(Pillar Encoder)
核心思想:对每根柱子内的点,用简化版PointNet提取特征
python
class PillarEncoder(nn.Module):
"""柱子特征编码器"""
def __init__(self, in_channels=4, out_channels=64):
"""
in_channels: 输入通道数(x,y,z,intensity)
out_channels: 输出特征通道数
"""
super().__init__()
# 简化的PointNet:对每个点提取特征
self.point_net = nn.Sequential(
nn.Linear(in_channels + 7, 64), # +7是因为要拼接额外特征
nn.BatchNorm1d(64),
nn.ReLU(),
nn.Linear(64, 64),
nn.BatchNorm1d(64),
nn.ReLU(),
)
def forward(self, pillars, indices, num_points):
"""
pillars: [M, max_points, 4] - M根柱子,每根最多max_points个点
indices: [M, 2] - 每根柱子在网格中的(x,y)索引
num_points: [M] - 每根柱子实际有多少个点
返回:
pseudo_image: [C, H, W] - 伪图像
"""
M, max_points, C = pillars.shape
# 1. 计算额外特征
# 每个点相对于柱子中心的偏移
center = pillars[:, :, :3].mean(dim=1, keepdim=True) # [M, 1, 3]
offset = pillars[:, :, :3] - center # [M, max_points, 3]
# 每个点相对于柱子中心的XY偏移
pillar_center_xy = torch.zeros_like(pillars[:, :, :2])
pillar_center_xy[:, :, 0] = indices[:, 0].unsqueeze(1) # x索引
pillar_center_xy[:, :, 1] = indices[:, 1].unsqueeze(1) # y索引
# 拼接所有特征
features = torch.cat([
pillars, # [M, max_points, 4] 原始坐标+强度
offset, # [M, max_points, 3] 相对偏移
pillar_center_xy, # [M, max_points, 2] 柱子中心
], dim=-1) # [M, max_points, 4+3+2=9]
# 2. 用PointNet提取特征
features = features.view(M * max_points, -1)
features = self.point_net(features) # [M*max_points, 64]
features = features.view(M, max_points, -1)
# 3. 最大值池化(聚合柱子内所有点)
# 用num_points创建mask
mask = torch.arange(max_points).unsqueeze(0) < num_points.unsqueeze(1)
mask = mask.unsqueeze(-1).float() # [M, max_points, 1]
features = features * mask # 屏蔽无效点
pillar_feature = torch.max(features, dim=1)[0] # [M, 64]
return pillar_feature关键细节:拼接额外特征
原始特征:(x, y, z, intensity) → 4维
额外特征:
- 相对于柱子中心的偏移 (Δx, Δy, Δz) → 3维
- 柱子中心的网格坐标 → 2维
总计:4 + 3 + 2 = 9维
为什么要这样做?
1. 偏移量 → 告诉网络点在柱子内的相对位置
2. 网格坐标 → 告诉网络这个柱子在全局的位置
3. 这样最大值池化后不会丢失位置信息3.3 步骤3:生成伪图像
python
def create_pseudo_image(pillar_features, indices, grid_size):
"""
将柱子特征映射到2D网格,生成伪图像
参数:
pillar_features: [M, 64] - M根柱子的特征
indices: [M, 2] - 每根柱子的网格索引
grid_size: (H, W) - 网格大小
返回:
pseudo_image: [64, H, W] - 伪图像
"""
C = pillar_features.shape[1]
H, W = grid_size
# 创建空白图像
pseudo_image = torch.zeros(C, H, W)
# 将柱子特征填入对应位置
for i in range(len(pillar_features)):
x, y = indices[i]
pseudo_image[:, y, x] = pillar_features[i]
return pseudo_image图解:
柱子特征:
柱子(0,0) → 特征向量 f0
柱子(1,0) → 特征向量 f1
柱子(2,1) → 特征向量 f2
...
映射到2D网格:
┌───┬───┬───┬───┬───┐
│f0 │f1 │ 0 │ 0 │ 0 │ 0 = 空柱子(没有点)
├───┼───┼───┼───┼───┤
│ 0 │ 0 │f2 │ 0 │ 0 │ 每个格子是一个64维向量
├───┼───┼───┼───┼───┤
│ 0 │ 0 │ 0 │f3 │ 0 │
└───┴───┴───┴───┴───┘
这就是"伪图像"!
看起来像图像,但每个"像素"是64维特征
可以直接用2D卷积处理3.4 步骤4:2D检测网络(Backbone + Detection Head)
python
class PointPillarsBackbone(nn.Module):
"""PointPillars的2D骨干网络"""
def __init__(self, in_channels=64):
super().__init__()
# Block 1:下采样
self.block1 = nn.Sequential(
nn.Conv2d(in_channels, 64, 3, stride=2, padding=1),
nn.BatchNorm2d(64),
nn.ReLU(),
nn.Conv2d(64, 64, 3, stride=1, padding=1),
nn.BatchNorm2d(64),
nn.ReLU(),
nn.Conv2d(64, 64, 3, stride=1, padding=1),
nn.BatchNorm2d(64),
nn.ReLU(),
)
# Block 2:继续下采样
self.block2 = nn.Sequential(
nn.Conv2d(64, 128, 3, stride=2, padding=1),
nn.BatchNorm2d(128),
nn.ReLU(),
nn.Conv2d(128, 128, 3, stride=1, padding=1),
nn.BatchNorm2d(128),
nn.ReLU(),
nn.Conv2d(128, 128, 3, stride=1, padding=1),
nn.BatchNorm2d(128),
nn.ReLU(),
)
# Block 3:最深层
self.block3 = nn.Sequential(
nn.Conv2d(128, 256, 3, stride=2, padding=1),
nn.BatchNorm2d(256),
nn.ReLU(),
nn.Conv2d(256, 256, 3, stride=1, padding=1),
nn.BatchNorm2d(256),
nn.ReLU(),
nn.Conv2d(256, 256, 3, stride=1, padding=1),
nn.BatchNorm2d(256),
nn.ReLU(),
)
def forward(self, x):
"""
x: [B, 64, H, W] - 伪图像
返回:多尺度特征列表
"""
x1 = self.block1(x) # [B, 64, H/2, W/2]
x2 = self.block2(x1) # [B, 128, H/4, W/4]
x3 = self.block3(x2) # [B, 256, H/8, W/8]
return [x1, x2, x3]特征金字塔网络(FPN):
python
class FPN(nn.Module):
"""特征金字塔网络,融合多尺度特征"""
def __init__(self):
super().__init__()
# 横向连接(将通道数统一)
self.lateral1 = nn.Conv2d(64, 128, 1)
self.lateral2 = nn.Conv2d(128, 128, 1)
self.lateral3 = nn.Conv2d(256, 128, 1)
# 输出平滑
self.smooth = nn.Sequential(
nn.Conv2d(128, 128, 3, padding=1),
nn.BatchNorm2d(128),
nn.ReLU(),
)
def forward(self, features):
"""
features: [x1, x2, x3] 多尺度特征
返回:融合后的特征图
"""
x1, x2, x3 = features
# 从深层到浅层融合
p3 = self.lateral3(x3) # [B, 128, H/8, W/8]
p2 = self.lateral2(x2) + \
nn.functional.interpolate(p3, scale_factor=2) # [B, 128, H/4, W/4]
p1 = self.lateral1(x1) + \
nn.functional.interpolate(p2, scale_factor=2) # [B, 128, H/2, W/2]
# 平滑
out = self.smooth(p1) # [B, 128, H/2, W/2]
return out检测头:
python
class DetectionHead(nn.Module):
"""检测头,预测类别和边界框"""
def __init__(self, in_channels=128, num_classes=3, num_anchors=2):
"""
num_classes: 类别数(车、行人、自行车)
num_anchors: 每个位置的锚框数量
"""
super().__init__()
self.num_classes = num_classes
self.num_anchors = num_anchors
# 分类头:预测每个锚框的类别
self.cls_head = nn.Conv2d(
in_channels, num_anchors * num_classes, 1
)
# 回归头:预测边界框参数
# 每个框有7个参数:(x, y, z, w, l, h, yaw)
self.reg_head = nn.Conv2d(
in_channels, num_anchors * 7, 1
)
# 方向头:预测朝向(正面/背面)
self.dir_head = nn.Conv2d(
in_channels, num_anchors * 2, 1
)
def forward(self, x):
"""
x: [B, 128, H, W] - FPN输出的特征图
返回:
cls: [B, H*W*num_anchors, num_classes] - 分类得分
reg: [B, H*W*num_anchors, 7] - 边界框参数
dir: [B, H*W*num_anchors, 2] - 朝向分类
"""
B, C, H, W = x.shape
# 分类预测
cls = self.cls_head(x) # [B, num_anchors*num_classes, H, W]
cls = cls.permute(0, 2, 3, 1) # [B, H, W, num_anchors*num_classes]
cls = cls.reshape(B, -1, self.num_classes)
# 回归预测
reg = self.reg_head(x) # [B, num_anchors*7, H, W]
reg = reg.permute(0, 2, 3, 1) # [B, H, W, num_anchors*7]
reg = reg.reshape(B, -1, 7)
# 方向预测
dir = self.dir_head(x) # [B, num_anchors*2, H, W]
dir = dir.permute(0, 2, 3, 1) # [B, H, W, num_anchors*2]
dir = dir.reshape(B, -1, 2)
return cls, reg, dir四、完整的PointPillars代码
4.1 完整网络
python
import torch
import torch.nn as nn
class PointPillars(nn.Module):
"""完整的PointPillars网络"""
def __init__(self, num_classes=3):
"""
num_classes: 检测类别数
默认3:车辆、行人、自行车
"""
super().__init__()
# 1. 柱子编码器
self.pillar_encoder = PillarEncoder(
in_channels=4, # x, y, z, intensity
out_channels=64
)
# 2. 2D骨干网络
self.backbone = PointPillarsBackbone(in_channels=64)
# 3. 特征金字塔
self.fpn = FPN()
# 4. 检测头
self.detection_head = DetectionHead(
in_channels=128,
num_classes=num_classes,
num_anchors=2
)
def forward(self, pillars, indices, num_points, grid_size):
"""
pillars: [M, max_points, 4] - 柱子内的点
indices: [M, 2] - 柱子的网格索引
num_points: [M] - 每根柱子的点数
grid_size: (H, W) - 网格大小
返回:
cls: 分类得分
reg: 边界框参数
dir: 朝向分类
"""
# 1. 编码柱子特征
pillar_features = self.pillar_encoder(
pillars, indices, num_points
) # [M, 64]
# 2. 生成伪图像
pseudo_image = create_pseudo_image(
pillar_features, indices, grid_size
) # [64, H, W]
pseudo_image = pseudo_image.unsqueeze(0) # [1, 64, H, W]
# 3. 2D骨干网络
features = self.backbone(pseudo_image)
# 4. 特征金字塔融合
fused = self.fpn(features) # [1, 128, H/2, W/2]
# 5. 检测
cls, reg, dir = self.detection_head(fused)
return cls, reg, dir4.2 锚框设计
python
class AnchorGenerator:
"""锚框生成器"""
def __init__(self):
# 不同类别的锚框尺寸
# 格式:(长, 宽, 高)
self.anchors = {
'vehicle': (4.0, 1.6, 1.5), # 车辆
'pedestrian': (0.8, 0.6, 1.7), # 行人
'cyclist': (1.8, 0.6, 1.7), # 自行车
}
def generate(self, grid_size, anchor_sizes):
"""
为每个网格位置生成锚框
参数:
grid_size: (H, W) - 网格大小
anchor_sizes: 锚框尺寸列表
返回:
anchors: [H*W*num_anchors, 7] - 锚框
格式:(x, y, z, w, l, h, yaw)
"""
H, W = grid_size
anchors = []
for i in range(H):
for j in range(W):
# 网格中心坐标
x = j * pillar_size + pillar_size / 2
y = i * pillar_size + pillar_size / 2
for size in anchor_sizes:
l, w, h = size
z = h / 2 # 锚框底部在地面
# 两个朝向:0度和90度
for yaw in [0, 1.57]: # 0和π/2
anchors.append([x, y, z, w, l, h, yaw])
return torch.FloatTensor(anchors)4.3 损失函数
python
class PointPillarsLoss(nn.Module):
"""PointPillars的损失函数"""
def __init__(self):
super().__init__()
# 分类损失
self.cls_loss = nn.FocalLoss(alpha=0.25, gamma=2)
# 回归损失(Smooth L1)
self.reg_loss = nn.SmoothL1Loss(reduction='none')
# 方向损失
self.dir_loss = nn.CrossEntropyLoss(reduction='none')
def forward(self, pred_cls, pred_reg, pred_dir,
target_cls, target_reg, target_dir, mask):
"""
pred_cls: [B, N, num_classes] - 预测分类
pred_reg: [B, N, 7] - 预测回归
pred_dir: [B, N, 2] - 预测方向
target_cls: [B, N] - 目标分类
target_reg: [B, N, 7] - 目标回归
target_dir: [B, N] - 目标方向
mask: [B, N] - 正样本mask
"""
# 1. 分类损失(所有样本)
cls_loss = self.cls_loss(pred_cls, target_cls)
# 2. 回归损失(仅正样本)
reg_loss = self.reg_loss(pred_reg, target_reg)
reg_loss = reg_loss * mask.unsqueeze(-1)
reg_loss = reg_loss.sum() / (mask.sum() + 1e-6)
# 3. 方向损失(仅正样本)
dir_loss = self.dir_loss(pred_dir, target_dir)
dir_loss = dir_loss * mask
dir_loss = dir_loss.sum() / (mask.sum() + 1e-6)
# 总损失
total_loss = cls_loss + 2 * reg_loss + 0.2 * dir_loss
return total_loss, cls_loss, reg_loss, dir_loss4.4 训练代码
python
def train_pointpillars():
# 1. 创建模型
model = PointPillars(num_classes=3)
model = model.cuda()
# 2. 优化器
optimizer = torch.optim.Adam(
model.parameters(), lr=0.001, weight_decay=0.01
)
scheduler = torch.optim.lr_scheduler.CosineAnnealingLR(
optimizer, T_max=160
)
# 3. 损失函数
criterion = PointPillarsLoss()
# 4. 训练循环
for epoch in range(160):
model.train()
total_loss = 0
for batch in train_loader:
# 解包数据
pillars = batch['pillars'].cuda()
indices = batch['indices'].cuda()
num_points = batch['num_points'].cuda()
targets = batch['targets']
# 前向传播
pred_cls, pred_reg, pred_dir = model(
pillars, indices, num_points, grid_size
)
# 计算损失
loss, cls_loss, reg_loss, dir_loss = criterion(
pred_cls, pred_reg, pred_dir,
targets['cls'].cuda(),
targets['reg'].cuda(),
targets['dir'].cuda(),
targets['mask'].cuda()
)
# 反向传播
optimizer.zero_grad()
loss.backward()
optimizer.step()
total_loss += loss.item()
# 更新学习率
scheduler.step()
# 打印统计
print(f'Epoch {epoch+1}, Loss: {total_loss/len(train_loader):.4f}')
# 验证
if (epoch + 1) % 10 == 0:
evaluate(model, val_loader)五、PointPillars vs 其他方法(效果对比)
5.1 KITTI数据集上的性能对比
KITTI 3D检测基准(汽车类别,Moderate难度):
┌─────────────────┬───────────┬───────────┬───────────┐
│ 方法 │ AP Easy │ AP Mod │ AP Hard │
├─────────────────┼───────────┼───────────┼───────────┤
│ VoxelNet │ 81.97 │ 65.46 │ 62.85 │
│ SECOND │ 83.13 │ 68.20 │ 64.57 │
│ PointPillars │ 82.58 │ 74.31 │ 68.99 │
└─────────────────┴───────────┴───────────┴───────────┘
速度对比:
┌─────────────────┬───────────┬──────────────┐
│ 方法 │ FPS │ 推理时间 │
├─────────────────┼───────────┼──────────────┤
│ VoxelNet │ ~2 │ ~500ms │
│ SECOND │ ~20 │ ~50ms │
│ PointPillars │ ~62 │ ~16ms │
└─────────────────┴───────────┴──────────────┘5.2 为什么PointPillars既快又准?
1. 避免3D卷积
- 3D卷积计算量 O(N³)
- 2D卷积计算量 O(N²)
- 差一个数量级!
2. 柱子设计的巧妙之处
- 体素:3D网格,大部分是空的 → 浪费计算
- 柱子:只在XY平面划分,Z轴不分 → 自然稀疏
3. 利用成熟的2D检测框架
- FPN、锚框、NMS都是2D检测的成熟技术
- 不需要重新发明轮子
4. 工程优化
- 2D卷积有cuDNN高度优化
- 可以直接用TensorRT加速5.3 PointPillars的局限性
1. 柱子化会丢失Z轴细节
- 高度信息被压缩成特征
- 对于高度差异大的物体(如立着的人 vs 躺着的人)可能不敏感
2. 固定的柱子大小
- 小物体可能在一个柱子里信息不足
- 大物体可能跨多个柱子,需要后处理
3. 锚框设计需要先验知识
- 不同数据集需要不同的锚框尺寸
- 需要根据数据统计设计六、PointPillars在自动驾驶中的实际应用
6.1 传感器配置
典型的自动驾驶传感器配置:
┌──── 激光雷达(顶部)────┐
│ 360° 扫描 │
│ 64线/128线 │
└─────────────────────────┘
│
┌─────────────┼─────────────┐
│ │ │
前摄像头 左/右摄像头 后摄像头
│ │ │
└─────────────┼─────────────┘
│
┌─────────┴─────────┐
│ PointPillars │
│ 处理激光雷达 │
│ 输出3D检测框 │
└───────────────────┘6.2 完整的检测流水线
python
class AutonomousDrivingPipeline:
"""自动驾驶3D检测流水线"""
def __init__(self):
self.model = PointPillars(num_classes=3)
self.model.load_state_dict(torch.load('checkpoint.pth'))
self.model.eval()
# 后处理参数
self.nms_threshold = 0.5
self.score_threshold = 0.3
def detect(self, point_cloud):
"""
输入:原始点云 [N, 4]
输出:检测结果列表
"""
# 1. 预处理
pillars, indices, num_points = self.preprocess(point_cloud)
# 2. 模型推理
with torch.no_grad():
cls, reg, dir = self.model(
pillars, indices, num_points, grid_size
)
# 3. 后处理
boxes = self.postprocess(cls, reg, dir)
return boxes
def preprocess(self, point_cloud):
"""点云预处理"""
# 过滤地面点
point_cloud = point_cloud[point_cloud[:, 2] > -1.5]
# 过滤远处的点
point_cloud = point_cloud[
(point_cloud[:, 0] > 0) & (point_cloud[:, 0] < 70) &
(point_cloud[:, 1] > -40) & (point_cloud[:, 1] < 40)
]
# 柱子化
pillars, grid = pillarize(
point_cloud,
x_range=(0, 70),
y_range=(-40, 40),
pillar_size=(0.16, 0.16)
)
return pillars, grid
def postprocess(self, cls, reg, dir):
"""后处理:解码、NMS"""
# 解码边界框
boxes = self.decode_boxes(reg)
# 过滤低置信度
scores = torch.softmax(cls, dim=-1).max(dim=-1)[0]
mask = scores > self.score_threshold
boxes = boxes[mask]
scores = scores[mask]
# NMS
keep = self.nms(boxes, scores, self.nms_threshold)
boxes = boxes[keep]
return boxes6.3 实际部署考虑
1. 模型优化
- 使用TensorRT加速
- FP16推理(半精度浮点)
- 量化(INT8)
2. 工程优化
- 点云预处理用CUDA加速
- 柱子化用自定义CUDA kernel
- NMS用GPU实现
3. 实际性能
- 原始PointPillars:62 FPS
- TensorRT优化后:100+ FPS
- INT8量化后:200+ FPS七、PointPillars vs 其他3D检测方法
7.1 方法对比
按数据表示分类:
1. 基于体素的方法
VoxelNet → SECOND → ...
- 优点:保留3D结构
- 缺点:计算量大
2. 基于点的方法
PointNet → PointNet++ → ...
- 优点:保留原始点
- 缺点:密度不均匀时不稳定
3. 基于柱子的方法
PointPillars
- 优点:速度快,部署简单
- 缺点:Z轴信息压缩
4. 基于BEV(鸟瞰图)的方法
BEVDet → BEVFormer → ...
- 优点:多传感器融合方便
- 缺点:需要相机-LiDAR标定7.2 如何选择?
选择PointPillars的场景:
✅ 需要实时推理(>30 FPS)
✅ 只有激光雷达输入
✅ 嵌入式部署(算力有限)
✅ 快速原型开发
选择其他方法的场景:
- 需要更高精度 → SECOND, CenterPoint
- 需要多传感器融合 → BEVFormer, TransFusion
- 需要处理稀疏点云 → 3D-SSD, SA-SSD八、常见问题解答(FAQ)
Q1: PointPillars为什么比VoxelNet快那么多?
答:
核心原因:避免了3D卷积
VoxelNet:
3D体素 → 3D卷积 → 3D特征 → 检测
3D卷积计算量:O(C × D × H × W × k³)
其中k是卷积核大小(通常为3)
PointPillars:
柱子 → 2D伪图像 → 2D卷积 → 检测
2D卷积计算量:O(C × H × W × k²)
差一个数量级!
而且2D卷积有cuDNN高度优化Q2: 柱子大小怎么选?
答:
柱子大小影响精度和速度:
小柱子(0.1m × 0.1m):
- 精度高(保留更多细节)
- 伪图像大(计算量大)
- 速度慢
大柱子(0.2m × 0.2m):
- 精度低(细节丢失)
- 伪图像小(计算量小)
- 速度快
常用设置:
KITTI数据集:0.16m × 0.16m
nuScenes数据集:0.2m × 0.2mQ3: 每根柱子最多保留多少个点?
答:
通常设置:max_points = 32 或 64
原因:
- 大部分柱子只有几个点
- 设置上限避免内存爆炸
- 超过上限的点随机采样
实验表明:
- max_points = 32 足够
- 增加到64精度提升很小
- 但内存和计算量增加Q4: PointPillars能检测多远的物体?
答:
取决于激光雷达和设置:
典型设置:
- X方向:0m ~ 70m
- Y方向:-40m ~ 40m
- Z方向:-3m ~ 1m
远处物体的问题:
- 点数少(稀疏)
- 特征不足
- 检测困难
改进方法:
- 多尺度检测
- 远处用更大的柱子
- 结合相机图像Q5: PointPillars还能怎么改进?
答:
1. 加入注意力机制
- Pillar Attention
- 自适应特征聚合
2. 多传感器融合
- 相机 + LiDAR
- 融合图像特征
3. 时序信息
- 融合多帧点云
- 速度估计
4. 更好的骨干网络
- ResNet, EfficientNet
- 用更大的网络提升精度
5. 无锚框方法
- CenterPoint
- 去掉锚框设计九、从PointPillars到3D占用感知
9.1 PointPillars的输出是什么?
PointPillars输出:
- 3D边界框列表
- 每个框:位置 + 尺寸 + 朝向 + 类别
问题:
- 只能检测已知类别
- 无法处理不规则物体
- 对遮挡敏感9.2 3D占用感知的优势
3D占用感知输出:
- 3D体素网格
- 每个体素:占用/空 + 类别
优势:
- 可以表示任意形状
- 对遮挡更鲁棒
- 可以处理未知物体
从PointPillars到占用感知:
PointPillars:点云 → 柱子 → 伪图像 → 检测框
占用感知: 点云/图像 → 特征 → 3D占用网格9.3 知识迁移
PointPillars学到的知识:
1. 柱子化 → 高效的点云表示
2. 2D卷积 → 避免3D卷积的计算量
3. 特征金字塔 → 多尺度特征融合
4. 锚框设计 → 目标检测的先验知识
这些知识可以直接迁移到占用感知:
- 柱子化 → 体素化
- 2D卷积 → 3D稀疏卷积
- 特征金字塔 → 3D特征金字塔
- 检测头 → 分割头十、总结:PointPillars的精髓
10.1 核心思想
- 柱子化:把3D点云按XY平面分组,避免3D卷积
- 伪图像:将柱子特征映射到2D网格,利用成熟的2D检测
- 端到端:从原始点云到3D检测框,完全可训练
- 实时性:62 FPS,满足自动驾驶实时要求
10.2 一句话总结
PointPillars通过将点云组织成柱子并编码为伪图像,巧妙地将3D检测转化为2D检测,实现了速度和精度的完美平衡。
10.3 关键创新
| 创新 | 作用 |
|---|---|
| 柱子化 | 避免3D卷积,高效表示 |
| 伪图像 | 利用2D检测成熟技术 |
| 简化PointNet | 柱子内特征提取 |
| 特征金字塔 | 多尺度特征融合 |
10.4 下一步学习
- CenterPoint:无锚框的3D检测
- BEVFormer:鸟瞰图视角的多传感器融合
- 3D占用感知:从检测到分割
附录:关键术语表
| 术语 | 英文 | 含义 |
|---|---|---|
| 柱子 | Pillar | XY平面上的一个网格单元 |
| 伪图像 | Pseudo Image | 柱子特征映射成的2D特征图 |
| 锚框 | Anchor | 预定义的参考边界框 |
| NMS | Non-Maximum Suppression | 非极大值抑制,去除重复检测 |
| FPN | Feature Pyramid Network | 特征金字塔网络 |
| FPS | Frames Per Second | 每秒处理帧数 |
| BEV | Bird's Eye View | 鸟瞰图视角 |
| 激光雷达 | LiDAR | 光探测和测距传感器 |
| 体素 | Voxel | 3D像素,体积元素 |
下期预告:《从检测到感知------3D占用网格如何让自动驾驶"看穿"遮挡?》