原创代码,请勿翻卖
文章目录
程序功能
本程序复现论文《WSN 中存在测距误差的无锚点分布式自定位方法》的核心思想:在无锚点无线传感器网络中,仅利用邻居节点间带误差的 RSS 测距值建立全局测距残差目标函数,并使用最速下降法迭代修正节点相对坐标。程序最后通过二维刚体配准把相对坐标对齐到真实坐标系,用于评价定位误差。
在二维区域内随机生成传感器节点,并根据通信半径构建节点间邻接关系;随后对可通信节点之间的真实距离加入有界随机测距误差,形成带噪声的相对距离观测。在定位求解阶段,程序先利用基于最短路径距离的多维尺度分析(MDS)生成初始位置,再通过无锚点最速下降法最小化测距残差平方和,从而估计所有节点的相对坐标。
复现说明
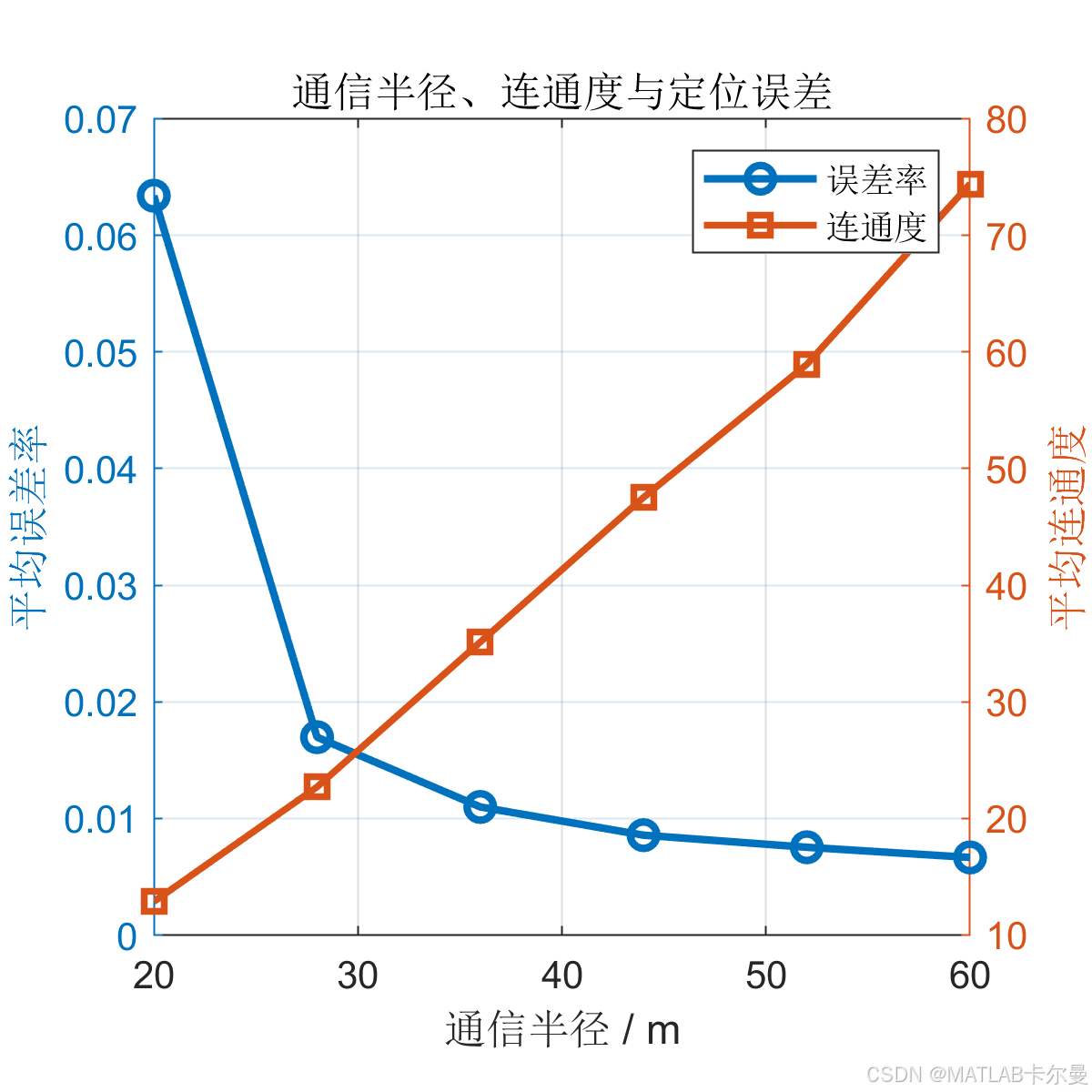
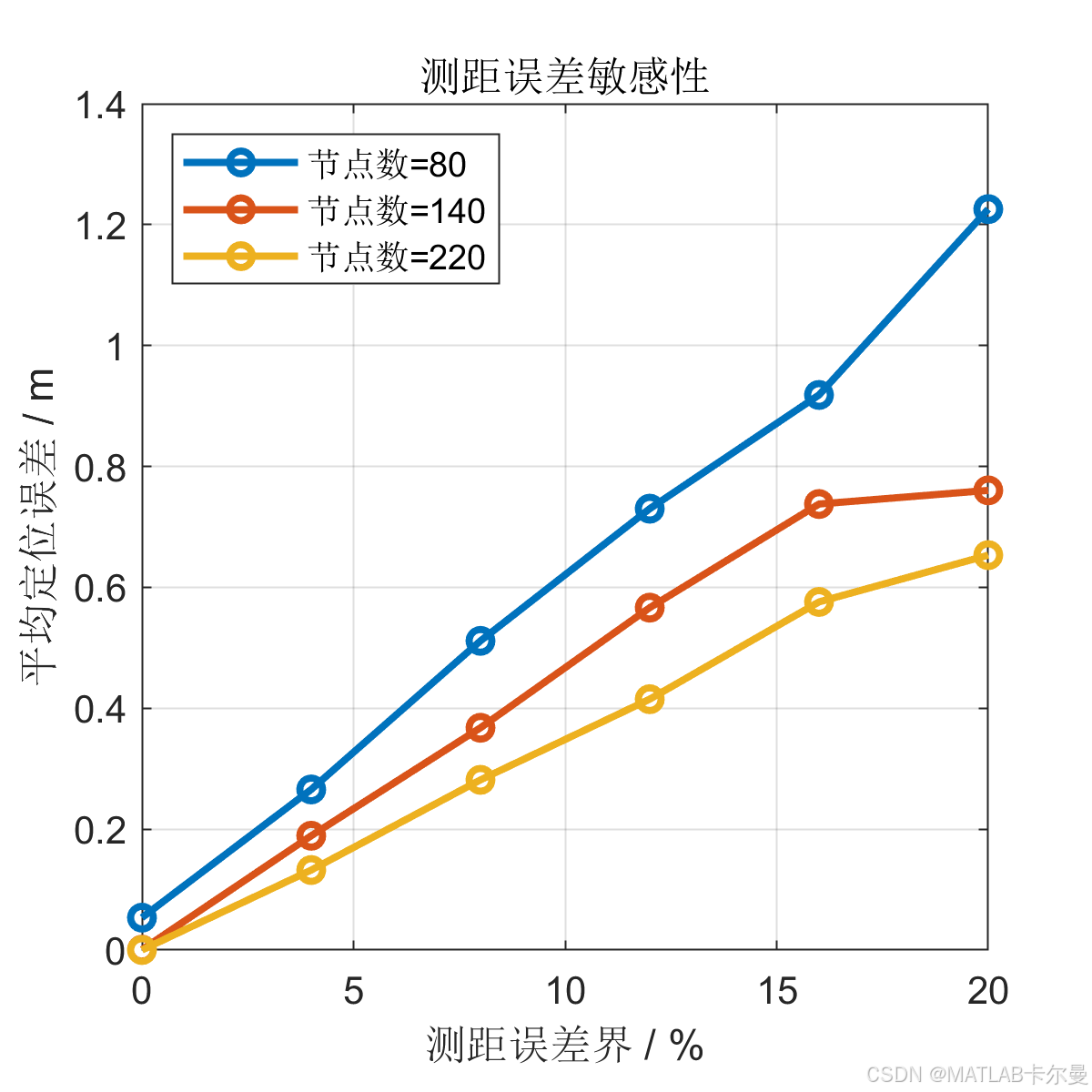
程序采用 100 m x 100 m 区域随机布置节点,测距误差按论文模型设置为 d_ij = d_ij^0(1+e_ij)。当网络连通度较高时,最速下降优化后的相对坐标能获得较低平均误差;通信半径较小或测距误差增大时,误差会明显上升,与论文图 2 至图 5 的趋势一致。
运行结果
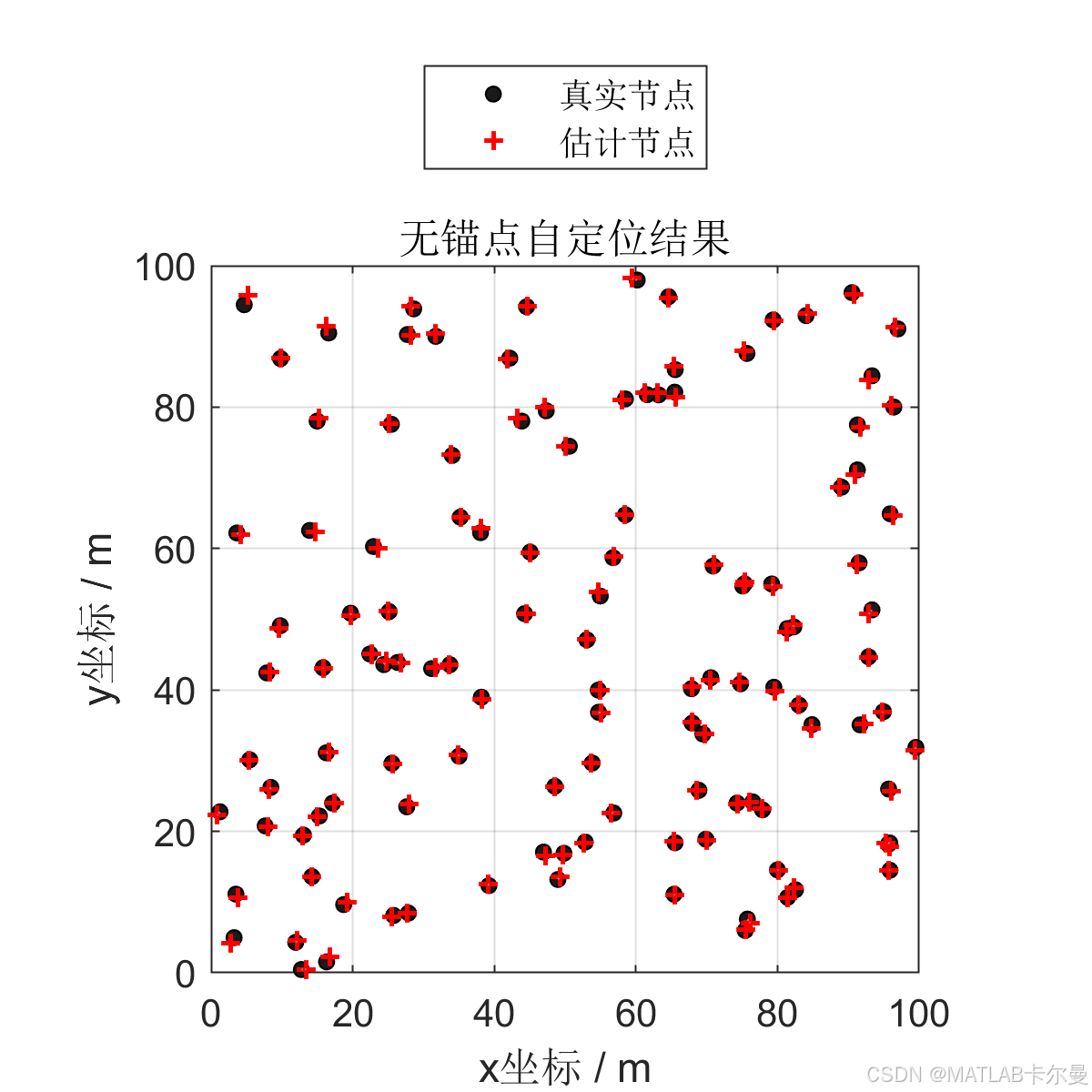
真实位置与估计位置对比:
通信半径与定位误差:
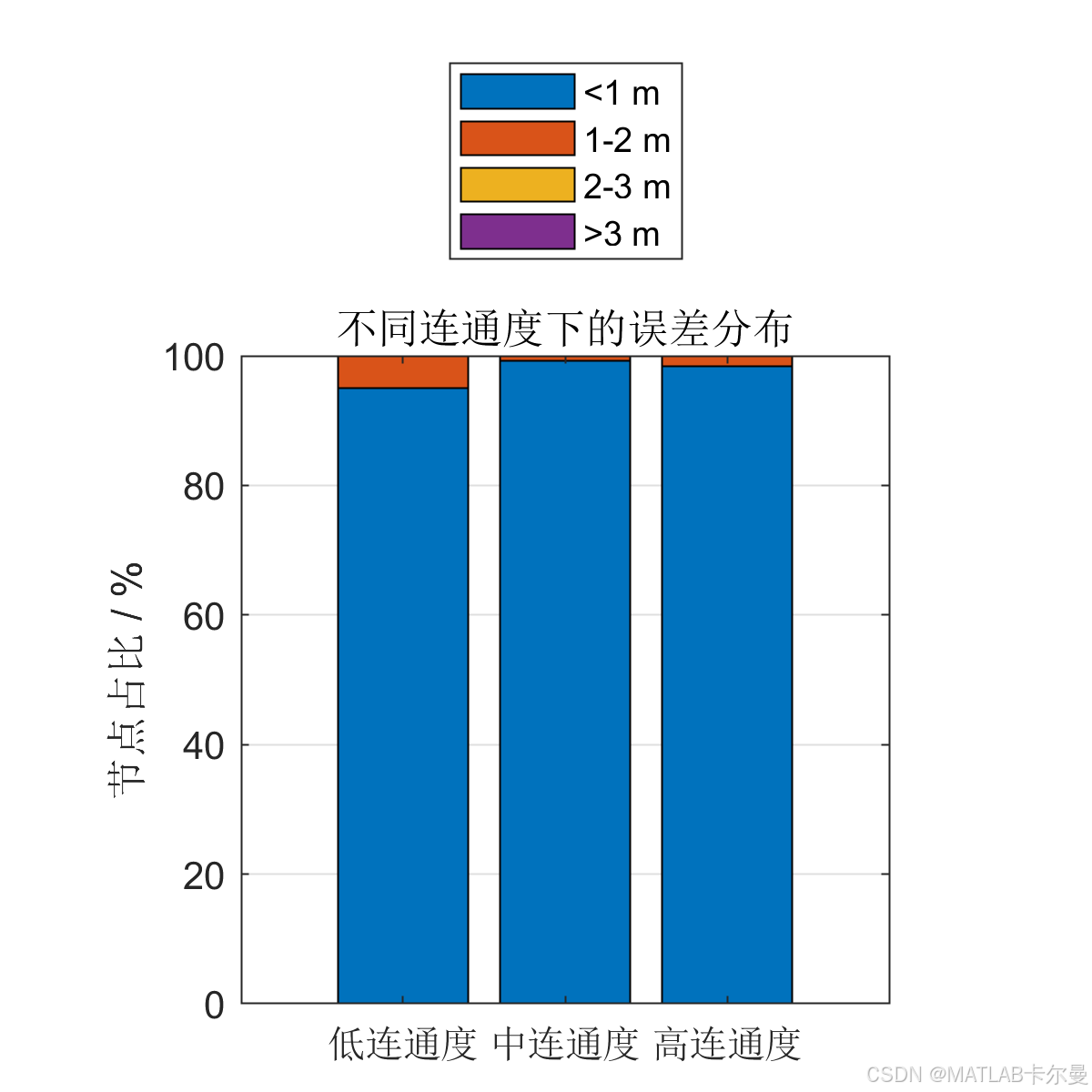
定位误差分布情况:
测距误差敏感性分析:
MATLAB源代码
部分代码如下:
matlab
%% 存在测距误差的WSN无锚点分布式自定位
% 作者:matlabfilter(V同号,除前期达成一致外,付费咨询)
% 复现论文:WSN中存在测距误差的无锚点分布式自定位方法
% 2026-06-30/Ver1
clear; clc; close all;
rng(0);
outDir = fileparts(mfilename('fullpath'));
if isempty(outDir), outDir = pwd; end
areaSize = 100;
N = 120;
radius = 38;
rangeErr = 0.08;
maxIter = 450;
[truePos, edges, dMeas] = makeWsnProblem(N, areaSize, radius, rangeErr);
[estRaw, objCurve] = anchorFreeSteepestDescent(edges, dMeas, N, maxIter);
estPos = align2D(estRaw, truePos);
err = vecnorm(estPos - truePos, 2, 2);
conn = 2 * size(edges, 1) / N;
meanErrRate = mean(err) / radius;
fprintf('\n========== WSN无锚点分布式自定位复现 ==========\n');
fprintf('节点数量:%d,通信半径:%.1f m,平均连通度:%.2f\n', N, radius, conn);
fprintf('测距误差界:%.1f%%\n', rangeErr * 100);
fprintf('平均误差:%.3f m,RMSE:%.3f m,平均误差率:%.4f\n', ...
mean(err), sqrt(mean(err.^2)), meanErrRate);
%% 通信半径扫描完整代码:
https://download.csdn.net/download/callmeup/93048968
扩展方向
-
存在 NLOS 测距异常的无锚点 WSN 鲁棒分布式自定位方法
-
基于图神经网络的 WSN 无锚点节点自定位与拓扑结构优化
-
面向稀疏连通网络的无锚点 WSN 刚性图判别与定位精度提升方法
-
融合 MDS 初值与深度展开优化的 WSN 分布式自定位算法
-
基于低秩矩阵补全的 WSN 缺失测距条件下无锚点定位方法
如需帮助,或有导航、定位滤波相关的代码定制需求,可从个人主页左侧联系我