目录
1.引入
其实不管内核怎么变,针对中断虚拟化无非就是上面两种,要么透传给VM,要么由Hypervisor统一分发。汽车MCU虚拟化--对中断虚拟化的思考(1)-CSDN博客
那么,作为车规MCU龙头的英飞凌在TC4xx是如何考虑中断虚拟化的呢?
2.TC4xx如何实现中断虚拟化
TC4xx的内核为TC1.8,支持虚拟化功能,
每个核有三套独立硬件资源HRHV、HRA、HRB,可支持最大8个VM,其中VM0运行hypervisor,VM1运行实时虚拟机,VM2-7运行其他VM,如下图所示:
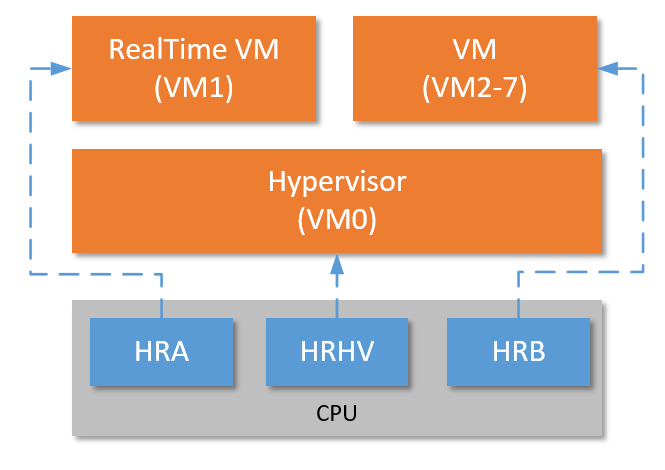
图 15
- HRVH -- Hypervisor hardware resource(VM0)
- HRA -- Real time virtual machine hardware resource (VM1)
- HRB -- Other virtual machine hardware resource (VM2-7)
上面提到,既然每个核支持最大8个VM,那么针对中断的处理也有对应8套资源,这里我们回到开头那几个问题:
- 假设被分配到的VM此时还没有运行怎么办?
- 假设被分配到的VM此时正在处理中断怎么办?
首先来看图说话,如下:
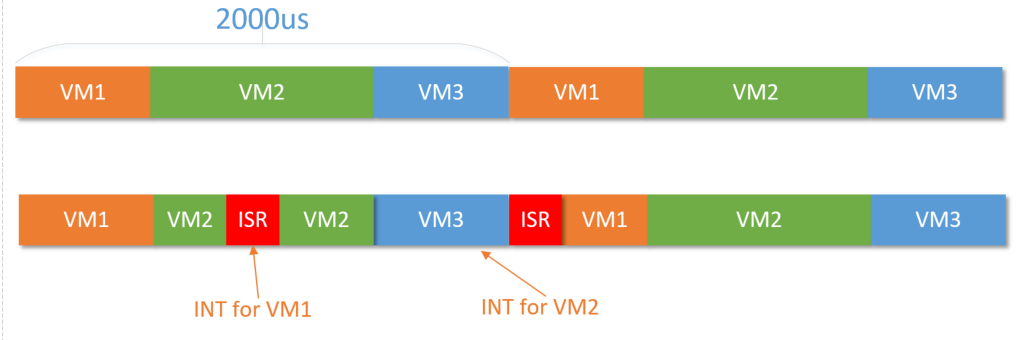 正常时间片为2000us,VM1占用500us,VM2占用1000us,VM3占用500us;
正常时间片为2000us,VM1占用500us,VM2占用1000us,VM3占用500us;
当VM2正在运行时,此时来了一个VM1的中断,该中断可以抢占VM2的时间,所以此时Hyperviosr需要将VM2的上下文保存,并切换到VM1,让其完成ISR处理,然后恢复现场VM2继续运行;
当VM3正在运行时,此时来了一个VM2的中断,但它不可抢占VM3的时间,所以需要VM3运行完毕后切换到VM2的ISR进行处理,当然这里也挤压了VM1的时间。
TC4xx是如何实现上述功能的呢?
在他们的设计中,每个中断SRN都可以被拓展分配给1个VM;每个VM都有自己独立的中断状态控制寄存器,包括当前VM中断系统是否使能(简称VMIE)、当前VM的优先级(简称VMCP)、Pending中断优先级(简称VMPIP);
为了实现运行VM在收到其他VM中断时可被抢占,新增了抢占阈值寄存器,简称THR,好玩的就来了。
假设当前正在运行VM1,此时来了一个VM0的中断,如果此时进来的Pending中断优先级高于VM0配置的抢占阈值,同时高于VM0的当前优先级,那么Hypervisor就需要进行上下文切换,返回到VM0处理中断,伪代码如下:
cpp
if (INT.VM_coming == current VM)
{
if ((VMPIP > VM_coming.VMCP) && (VM_coming.IE )
{
isr_routine();
}
else
{
Keep INT Pending
}
}
else (INT.vm_coming == VM0 )
{
if ((VMPIP > VM0.VMCP) && (VMPIP > VM0.THR)
{
Switch to HRHV
isr_routine();
}
else
{
Keep INT Pending
}
}同理,如果当前VM0、VM1、VM2同时运行,也需要执行上述步骤,只是在VM2如果要抢占VM1时,需要在Hypervisor模式下首先保存VM1的上下文到HRA,然后切换到HRB,让VM2进行中断处理。
本质上,这样的机制和透传很像,只是我们可以通过Hypervisor配置每个VM的中断状态控制器寄存器、抢占阈值寄存器来实现中断实时性的控制, 例如:
当我们把阈值配置为最大时,此时谁也无法进行抢占(Trap除外),只能得到时间片走完;如果阈值配置为最小,那就是直接透传,这时候性能最优。
3.小结
上面几节内容,记录了我对于中断虚拟化的思考过程。
其实在车载领域,特别是座舱域,仪表和中控是肯定要跑虚拟化的,目前用的最多是QNX Hypervisor,它关于CPU虚拟化、内存虚拟化、中断虚拟化、虚拟机通信等的视线对于目前MCU上Hypervisor应该是有借鉴意义。