最近项目上需要完成整个识别、定位、到最后的抓取流程。
分享一下,通过使用D435相机并结合Yolo V8识别出目标物体后,抠取出目标物体部分的有效深度图,最后将前景物体部分的RGB
D435相机结合Yolo V8识别出目标物体,并转点云出抓取位姿
- 1、D435相机取流
- [2、D435结合Yolo V8实时检测](#2、D435结合Yolo V8实时检测)
- 3、扣取指定物体的深度图
-
- [3.1 扣取指定物体的mask](#3.1 扣取指定物体的mask)
- [3.2 根据mask扣取物体有效深度部分](#3.2 根据mask扣取物体有效深度部分)
- [4、 结合相机内参转物体点云](#4、 结合相机内参转物体点云)
- [5、 抓取](#5、 抓取)
1、D435相机取流
使用pyrealsense2进行RGB-D获取视频流,这里最大的坑其实就是每一帧得做一个RGB-D帧间的对齐。
javascript
import cv2
import numpy as np
import pyrealsense2 as rs
pipeline = rs.pipeline()
align_to = rs.stream.color
align = rs.align(align_to)
config = rs.config()
D400_imgWidth, D400_imgHeight = 640, 480
config.enable_stream(rs.stream.color, D400_imgWidth, D400_imgHeight, rs.format.bgr8, 30)
config.enable_stream(rs.stream.depth, D400_imgWidth, D400_imgHeight, rs.format.z16, 30)
profile = pipeline.start(config)
while True:
frames = pipeline.wait_for_frames()
# RGB-D对齐
aligned_frames = align.process(frames)
aligned_color_frame = aligned_frames.get_color_frame()
aligned_depth_frame = aligned_frames.get_depth_frame()
if not aligned_depth_frame or not aligned_color_frame:
raise Exception("[info] No D435 data.")
rgb = np.asanyarray(aligned_color_frame.get_data())
d = np.asanyarray(aligned_depth_frame.get_data())
if len(rgb):
cv2.imshow("RGB", rgb)
cv2.imshow("D", rgb)
if cv2.waitKey(1) & 0xFF == ord("q"):
break2、D435结合Yolo V8实时检测
其实就是将D435的RGB流按照循环逐帧送进Yolo V8进行推理
javascript
from ultralytics import YOLO
model = YOLO(r"/train/weights/best.pt")
while True:
frames = pipeline.wait_for_frames()
aligned_frames = align.process(frames)
aligned_color_frame = aligned_frames.get_color_frame()
aligned_depth_frame = aligned_frames.get_depth_frame()
if not aligned_depth_frame or not aligned_color_frame:
raise Exception("[info] No D435 data.")
rgb = np.asanyarray(aligned_color_frame.get_data())
d = np.asanyarray(aligned_depth_frame.get_data())
if len(rgb):
results = model(rgb, conf=0.25)
annotated_frame = results[0].plot()
cv2.imshow("YOLOv8 Inference", annotated_frame)
if cv2.waitKey(1) & 0xFF == ord("q"):
break3、扣取指定物体的深度图
3.1 扣取指定物体的mask
正常场景中只有一小部分是我们想要的,比如说一张桌面上有许多物件,但我只想识别、或者后期只抓绿色的杯子。那么就需要将Yolo V8检测出来的所有结果进行后处理,筛出我们想要的物体。
javascript
// An highlighted block
'''进行深度学习前向传播推理'''
results = model(color_img, conf=0.25)
# 封装后处理函数,只保留指定"input"的mask。
def backward_handle_output(results , color_img, depth_img, nc, input):
center = None
cls = []
mapped_depth = None
annotated_frame = output[0].plot()
mask = None
# 如果检测到物体,也就是mask不为空时
if results [0].masks is not None:
# 获取所有检测框所属的类别
for cls_idx in range(len(output[0].boxes)):
cls.append(output[0].names.get(int(output[0].boxes.cls[cls_idx].item())))
# 只留下指定的"input"类别物体
if input in cls:
# 根据"input"对应的索引号,获取其mask
cls_idx = cls.index(input)
mask = np.array(output[0].masks.data.cpu())[cls_idx] 3.2 根据mask扣取物体有效深度部分
正常会通过深度图结合相机内参来转点云,所以如果我们只想要将我们待检测的物体部分的深度图转成点云图,那这样就可以过滤掉不相关的物体或背景。
javascript
# 判断非指定物体的有效区域
channel_zeros = mask == 0
'''初始化一个与原始深度图类型的一致的全0深度图'''
mapped_depth = np.zeros_like(depth_img)
'''也就是我们指定"input"物体mask区域对应的位置的深度信息抠出来,剩下非物体有效区域深度值全置为0'''
# 这样,我们就成功晒出了物体部分的深度值,其余全为背景0。
mapped_depth[~channel_zeros] = depth_img[~channel_zeros]
mapped_depth[channel_zeros] = 04、 结合相机内参转物体点云
javascript
import open3d as o3d
pcd = o3d.geometry.PointCloud()
def create_point_cloud_from_depth_image(depth, camera, organized=True):
""" Generate point cloud using depth image only.
Input:
depth: [numpy.ndarray, (H,W), numpy.float32]
depth image
camera: [CameraInfo]
camera intrinsics
organized: bool
whether to keep the cloud in image shape (H,W,3)
Output:
cloud: [numpy.ndarray, (H,W,3)/(H*W,3), numpy.float32]
generated cloud, (H,W,3) for organized=True, (H*W,3) for organized=False
"""
assert(depth.shape[0] == camera.height and depth.shape[1] == camera.width)
xmap = np.arange(camera.width)
ymap = np.arange(camera.height)
xmap, ymap = np.meshgrid(xmap, ymap)
points_z = depth / camera.scale
points_x = (xmap - camera.cx) * points_z / camera.fx
points_y = (ymap - camera.cy) * points_z / camera.fy
cloud = np.stack([points_x, points_y, points_z], axis=-1)
if not organized:
cloud = cloud.reshape([-1, 3])
return cloud
if mapped_depth is not None:
mapped_depth = mapped_depth.astype(float) / 1000.0
depth_img = depth_img.astype(float) / 1000.0
mask_cloud = create_point_cloud_from_depth_image(mapped_depth, camera, organized=True)
depth_range = [0.0, 1.5]
mask = (depth_img < depth_range[1]) & (depth_img > depth_range[0])
obj_cloud_masked = mask_cloud[mask]
rgb_masked = color_img[mask] / 255
idxs = np.random.choice(len(cloud_masked), 20000, replace=True)
obj_cloud_sampled = obj_cloud_masked[idxs]
rgb_sampled = rgb_masked[idxs]
pcd.points = o3d.utility.Vector3dVector(obj_cloud_sampled.astype(np.float32))
pcd.colors = o3d.utility.Vector3dVector(rgb_sampled.astype(np.float32))
# 如果可视化的点云方向不正,可进行坐标系方向调整
# obj_cloud_sampled[:, 1] = - obj_cloud_sampled[:, 1]
# obj_cloud_sampled[:, 2] = - obj_cloud_sampled[:, 2]
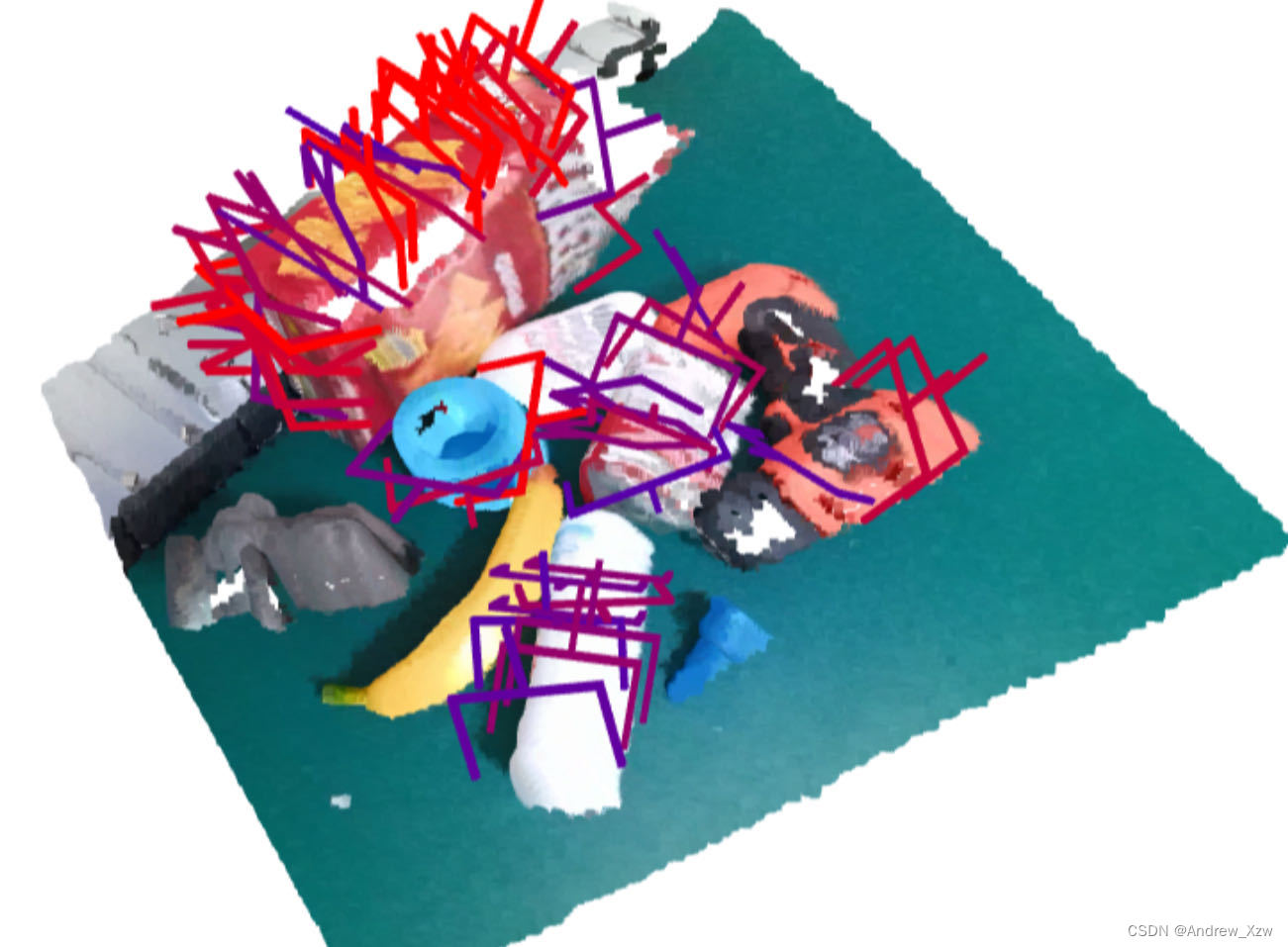
o3d.visualization.draw_geometries([pcd])5、 抓取
如果相对整个场景进行感知抓取,而非指定单个物体,就可以把根据物体mask扣取深度图部分取消。进而,使用开源GraspNet、AnyGrasp等抓取网络进行抓取姿势预测。