目录
[1 主要内容](#1 主要内容)
[2 部分代码](#2 部分代码)
[3 程序结果](#3 程序结果)
[4 下载链接](#4 下载链接)
1 主要内容
程序主要对蝴蝶算法(BOA)进行改进,参考文献《基于改进蝴蝶优化算法的冗余机器人逆运动学求解》,有如下改进策略:
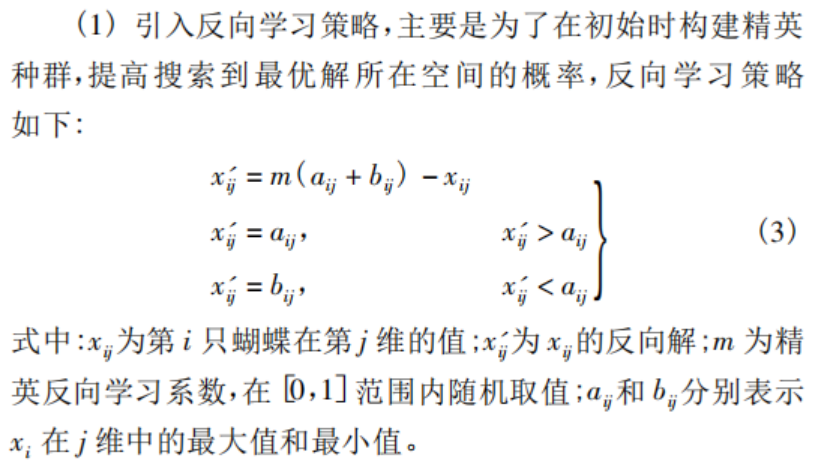
- 改进1:采用反向学习策略构建精英种群,提高种群质量
- 改进2:在全局搜索阶段,引入柯西变异,增强算法跳出局部最优的能力
- 改进3:引入随机惯性权重改变前一位置对当前位置更新的影响,确保能跳出局部最优

1.1 改进详细模型

改进惯性权重方法比较常见,不同的非线性函数能够得到不同的优化方法,程序中采用sin函数构造惯性权重的进化曲线,当然大家在编程过程中也可以采用其他非线性函数,如Sigmoid函数(见下图),甚至可以用分段方式提高算法的创新性。
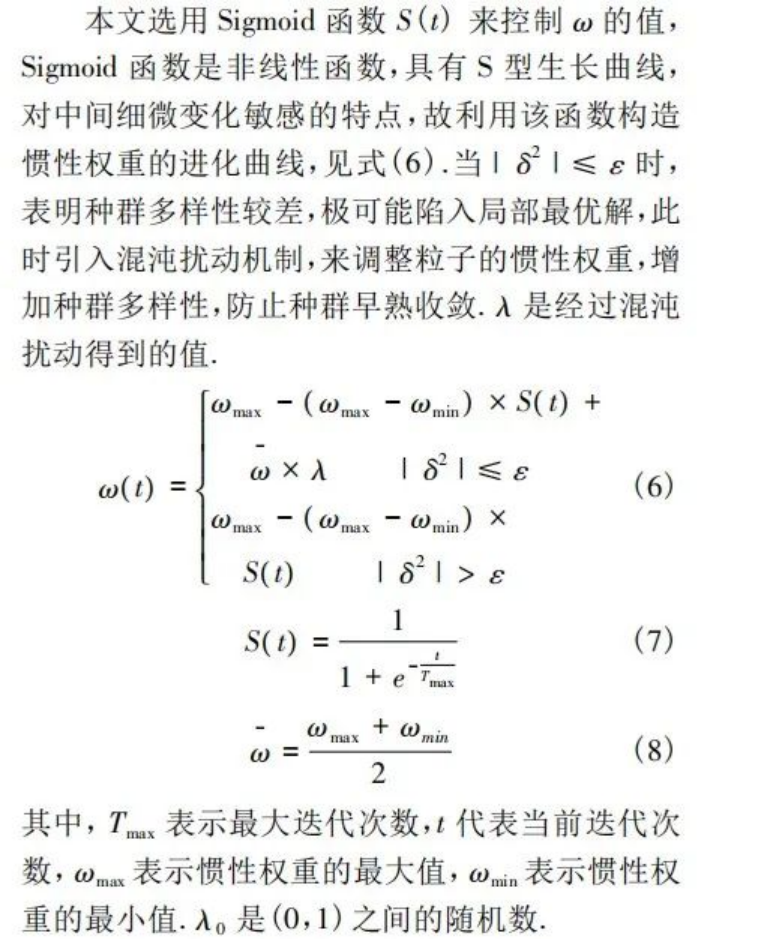
转自《一种改进惯性权重的混沌粒子群优化算法》---谷晓琳
2 部分代码
function [fmin,best_pos,Convergence_curve]=IBOA(n,N_iter,Lb,Ub,dim,fobj)
p=0.8; % probabibility switch,开关概率
power_exponent=0.1; % 幂指数
sensory_modality=0.01; % 感觉因子
%Initialize the positions of search agents
% Sol=initialization(n,dim,Ub,Lb);
% ★★改进1:反向学习种群初始化★★
Sol_forward=initialization_for(n,dim,Ub,Lb);
Sol_backward=initialization_back(Sol_forward,n,dim,Ub,Lb);
Sol_all=[Sol_forward;Sol_backward];
for i = 1:2*n
Sol_all_fitness(i)=fobj(Sol_all(i,:));
end
[~,sorted_indexes]=sort(Sol_all_fitness);
for i = 1:n
Sol(i,:)=Sol_all(sorted_indexes(i),:);
end
for i=1:n
Fitness(i)=fobj(Sol(i,:));
end
% Find the current best_pos
[fmin,I]=min(Fitness);
best_pos=Sol(I,:);
S=Sol;
% Start the iterations -- Butterfly Optimization Algorithm
for t=1:N_iter
for i=1:n% Loop over all butterflies/solutions
%Calculate fragrance of each butterfly which is correlated with objective function,计算与目标函数相关的每只蝴蝶的香味
Fnew=fobj(S(i,:));
FP=(sensory_modality*(Fnew^power_exponent)); % 每只蝴蝶的香味
%Global or local search
if rand2:全局搜索阶段引入柯西变异★★ ori_value = rand(1,dim);
3 程序结果
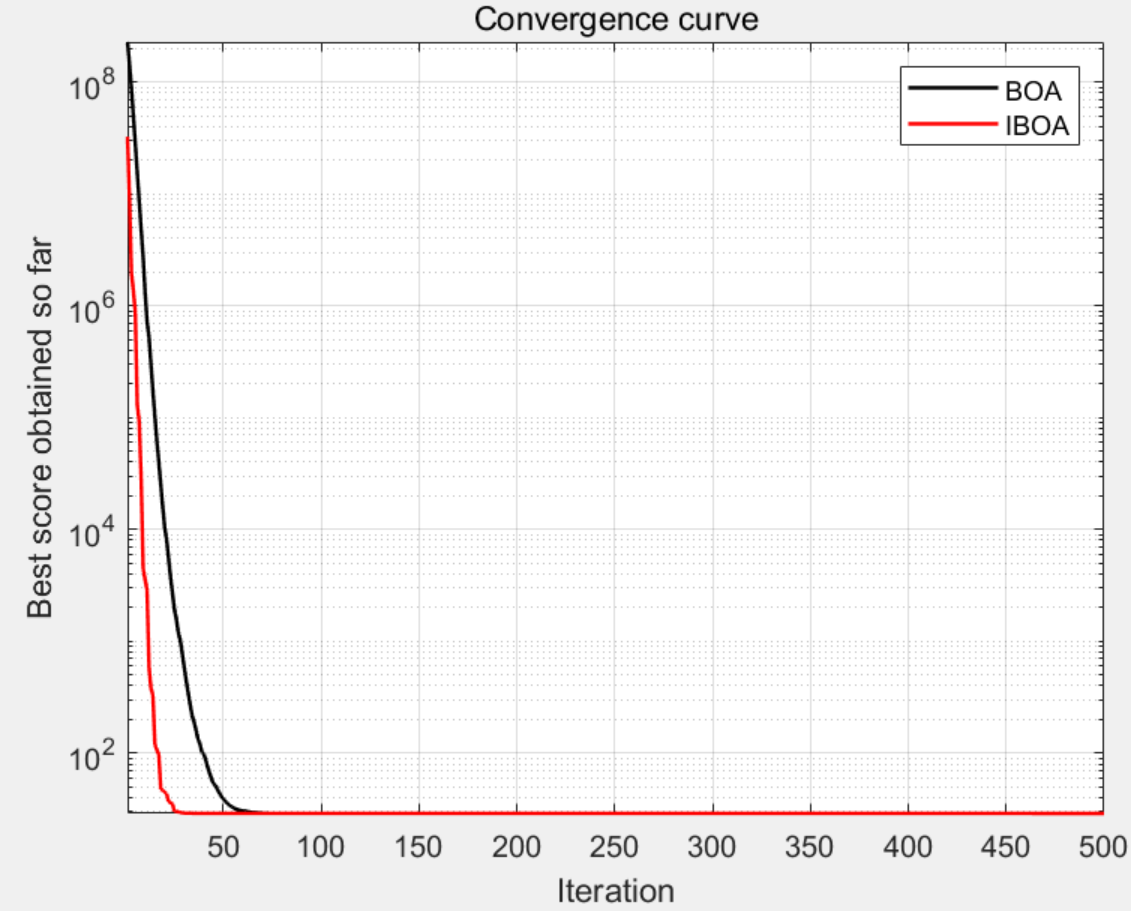
混合策略改进蝴蝶算法提供了23种测试函数,可以通过main程序修改测试函数,程序Get_Functions_detailsPRO有具体每个测试函数的公式,下面得到F2和F5两种测试函数下的原始算法和改进算法收敛性对比。
测试函数F2:
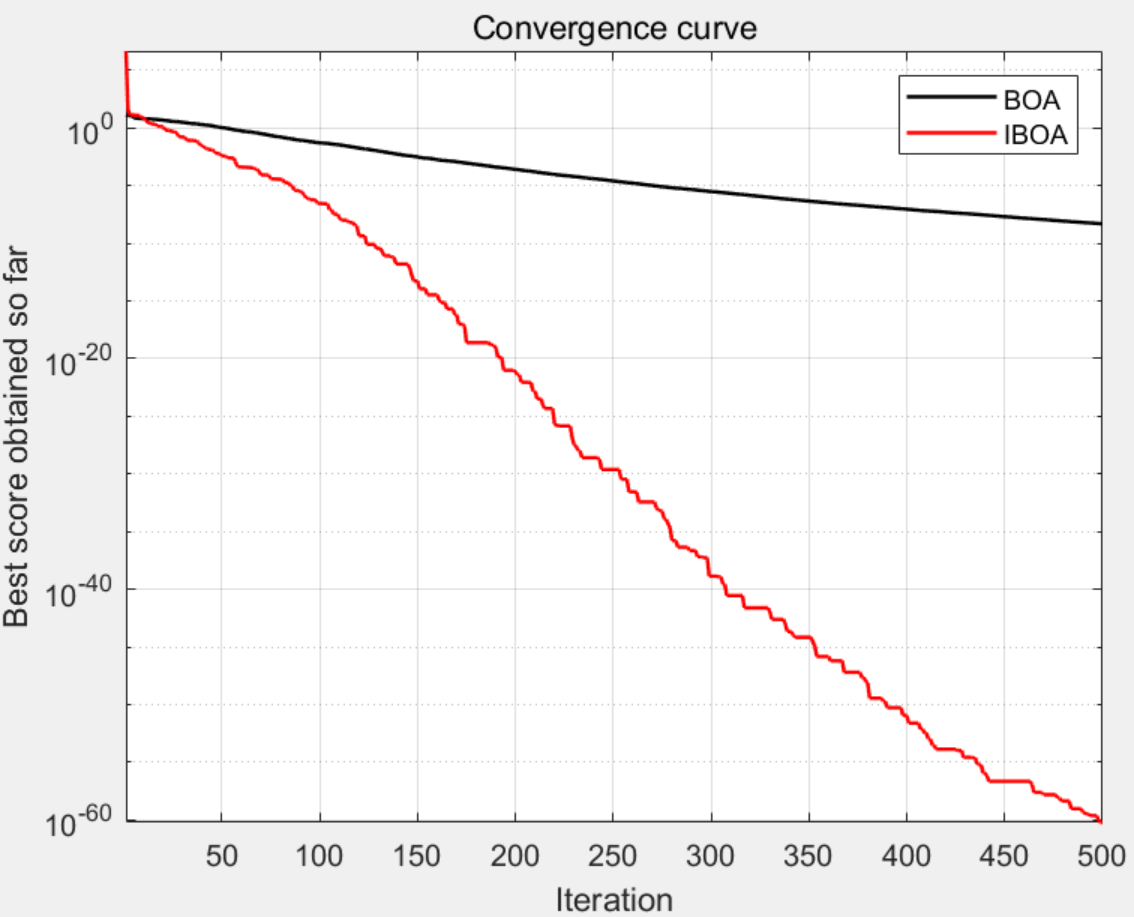
测试函数F5: