目录
- [1、ROCK 3C和树莓派摄像头模块V2介绍](#1、ROCK 3C和树莓派摄像头模块V2介绍)
- [2、ROCK 3C在rsetup开启支持](#2、ROCK 3C在rsetup开启支持)
- 3、测试指令
- 4、编译Opencv
-
- [4.1 增加swap,确保内存够用](#4.1 增加swap,确保内存够用)
- [4.2 安装依赖和下载opencv](#4.2 安装依赖和下载opencv)
- [4.3 编译参考链接](#4.3 编译参考链接)
- 5、使用opencv调用树莓派摄像头模块V2
1、ROCK 3C和树莓派摄像头模块V2介绍
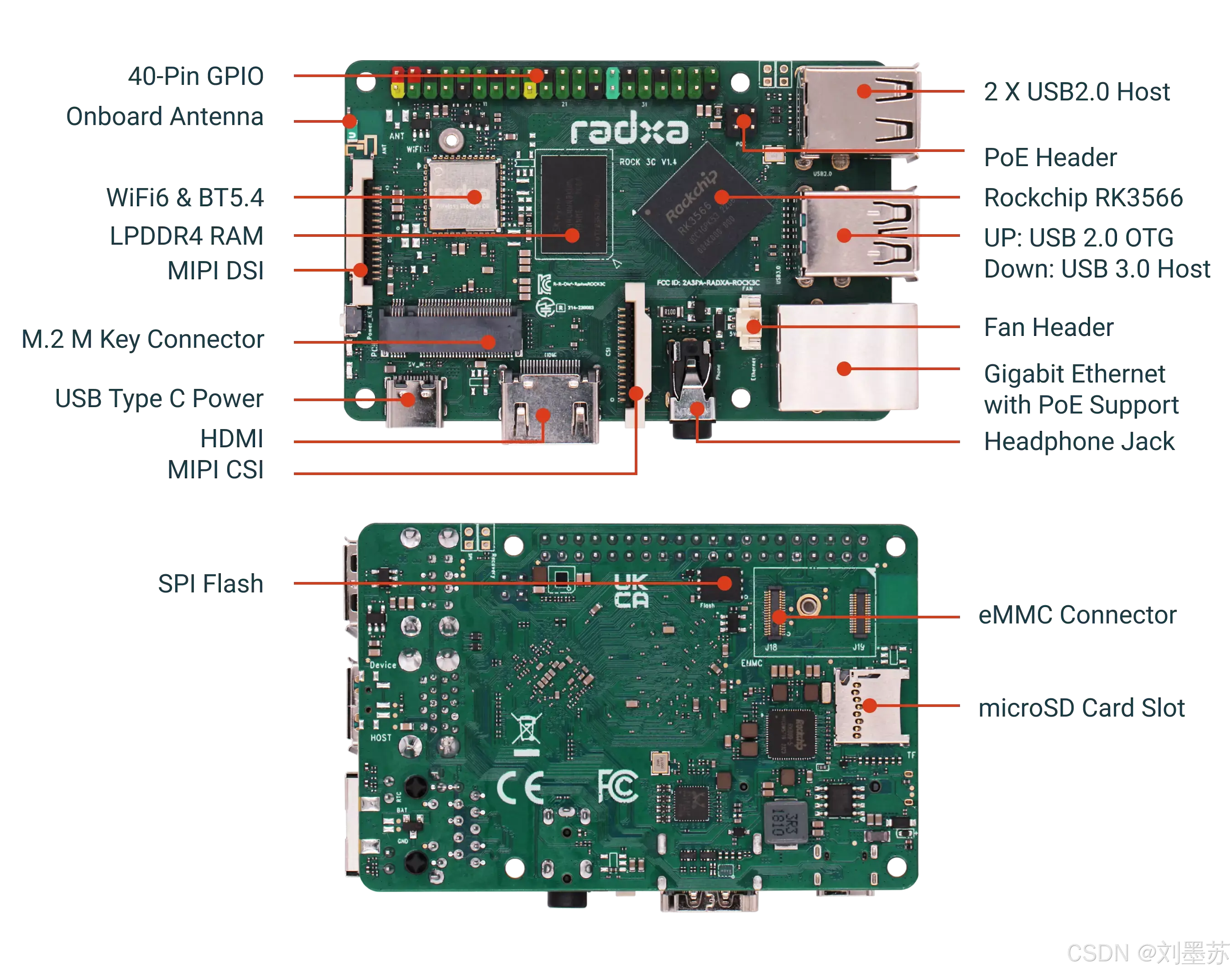
ROCK 3C 是一款基于 RK3566 SoC 开发的SBC。
搭载了四核 Cortex-A55 ARM 处理器,板载 32 位 LPDDR4 内存。
主板预览图如下:
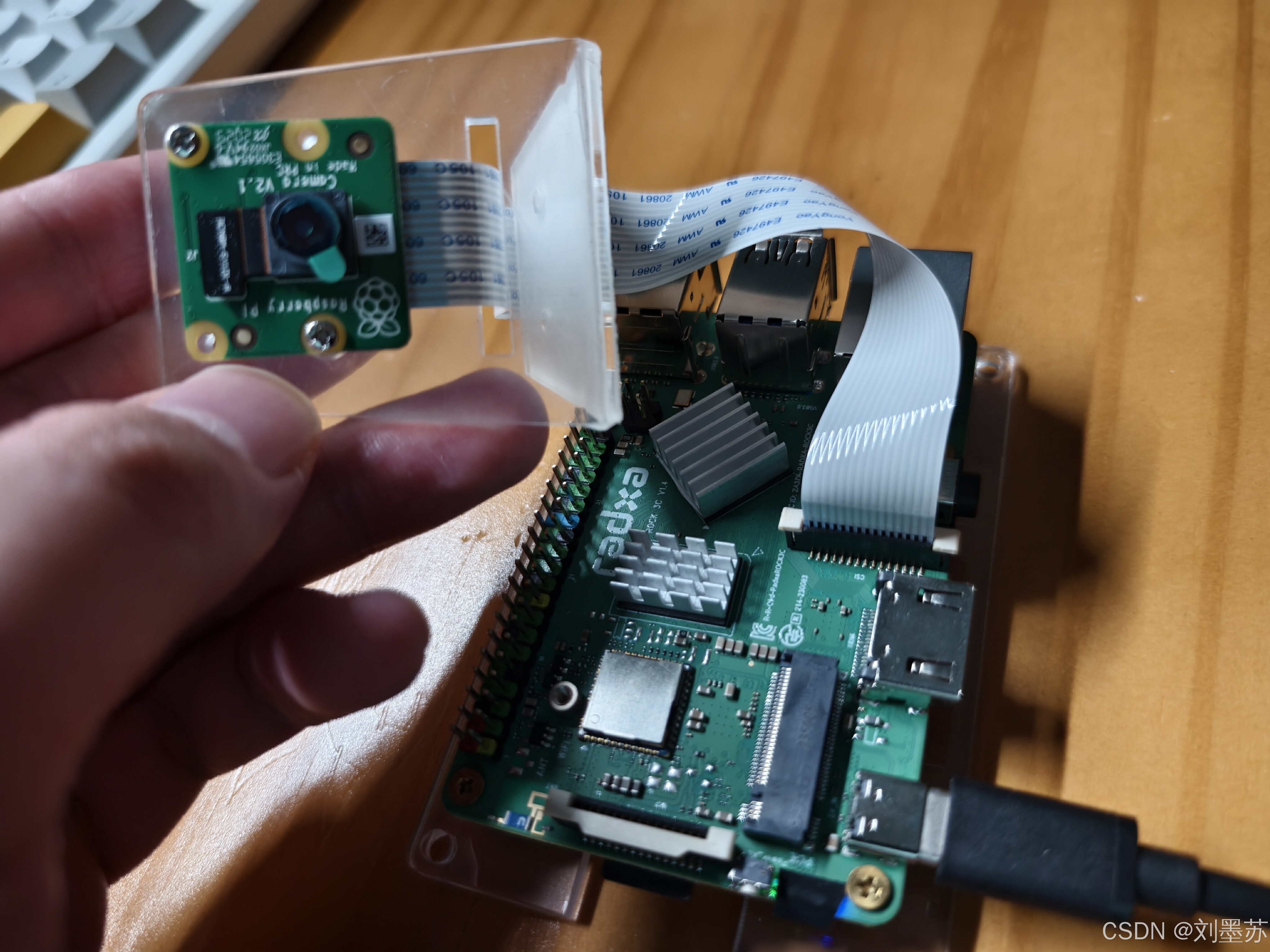
树莓派原装摄像头 V2 版是一款基于索尼 IMX219 的 800 万像素摄像头模块,通过CSI接口进行连接。
2、ROCK 3C在rsetup开启支持
没有开启支持前,是检测不到对应的video设备的
bash
radxa@rock-3c:~$ ls /dev/video*
/dev/video-dec0 /dev/video-enc0rsetup使用办法:
https://docs.radxa.com/rock3/rock3c/os-config/rsetup#rsetup
在终端输入rsetup,配置设备树 Overlays,空格选中Enable Raspberry Pi Camera v2
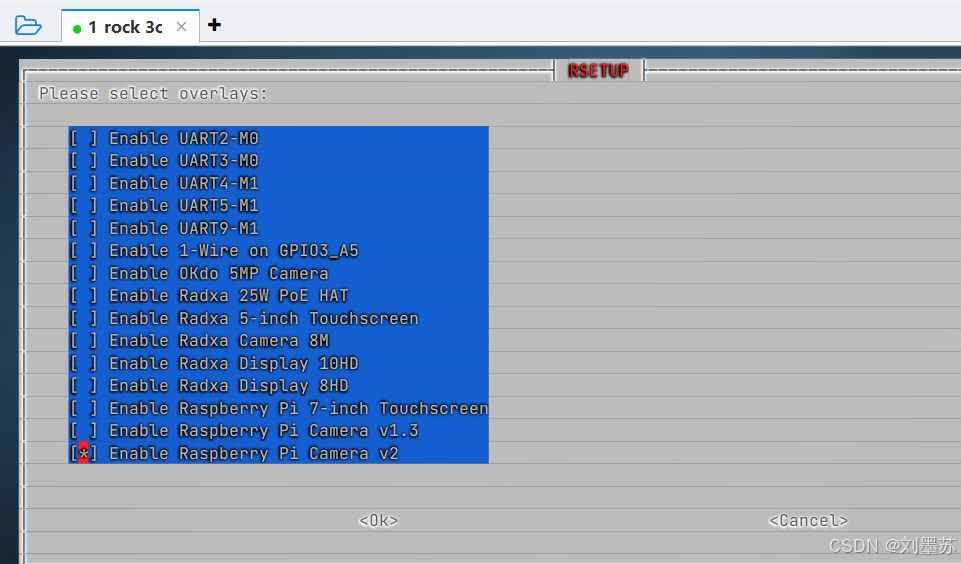
回到终端就可以检测到

3、测试指令
bash
# 成功
gst-launch-1.0 v4l2src device=/dev/video0 io-mode=4 ! videoconvert ! video/x-raw,format=NV12,width=1920,height=1080 ! jpegenc ! multifilesink location=/home/radxa/test.jpg执行指令,开始读秒后按下 Ctrl + C即可拍照, 照片路径为 /home/radxa/test.jpg
使用cheese可用


但是pip安装的opencv-contrib-python无法调用
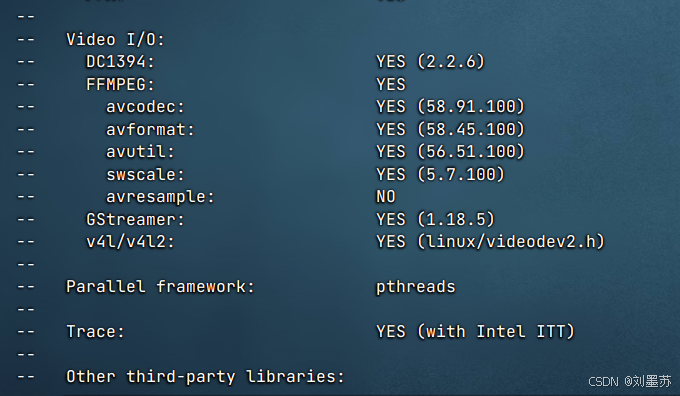
论坛发贴后后,得知需要opencv支持GStreamer ,所以我们通过编译获得一个支持GStreamer 的opencv
4、编译Opencv
4.1 增加swap,确保内存够用
bash
radxa@rock-3c:~$ cd /opt
radxa@rock-3c:/opt$ sudo mkdir image
[sudo] radxa 的密码:
radxa@rock-3c:/opt$ sudo touch swap
radxa@rock-3c:/opt$ sudo dd if=/dev/zero of=/opt/image/swap bs=1024 count=2048000
记录了2048000+0 的读入
记录了2048000+0 的写出
2097152000字节(2.1 GB,2.0 GiB)已复制,101.993 s,20.6 MB/s
radxa@rock-3c:/opt$ sudo mkswap /opt/image/swap
mkswap: /opt/image/swap: insecure permissions 0644, 0600 suggested.
Setting up swapspace version 1, size = 2 GiB (2097147904 bytes)
no label, UUID=3d7f188b-76f5-4280-a40a-0a2a4ac51c56
radxa@rock-3c:/opt$ free -m
total used free shared buff/cache available
内存: 1983 381 21 4 1580 1533
交换: 991 1 990
radxa@rock-3c:/opt$ sudo vim /etc/fstab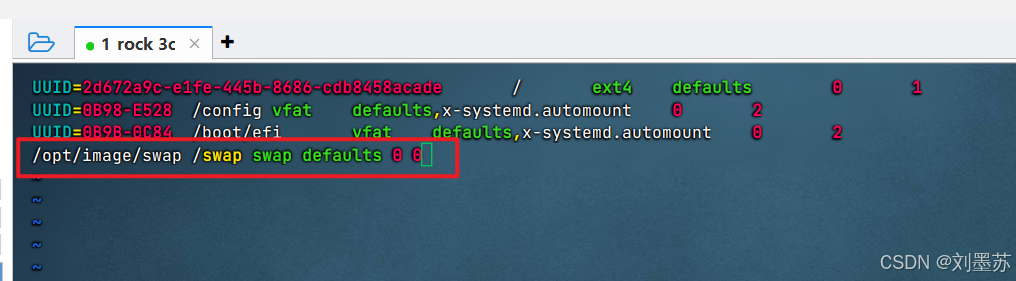

4.2 安装依赖和下载opencv
bash
sudo apt-get install build-essential cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev python3.9-dev python3-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libdc1394-22-dev
sudo apt install gstreamer1.0*
sudo apt install libgstreamer1.0-dev libgstreamer-plugins-base1.0-devopencv4.5包: https://pan.baidu.com/s/1DpXXZu_FRVVxTNJ9vlzrkw 提取码: 2rxp
我这里使用的是opencv4.5,在当前目录解压即可
bash
cd opencv4.5.0
mkdir build
cd build执行编译,DWITH_GSTREAMER=ON就是要添加的支持
bash
sudo cmake -DCMAKE_BUILD_TYPE=RELEASE \
-DCMAKE_INSTALL_PREFIX=/usr/local \
-DPYTHON_DEFAULT_EXECUTABLE=$(which python3.9) \
-DPYTHON3_EXECUTABLE=$(which python3.9) \
-DWITH_GSTREAMER=ON \
-DPYTHON3_INCLUDE_DIR=/usr/include/python3.9 \
-DPYTHON3_INCLUDE_DIR2=/usr/include/aarch64-linux-gnu/python3.9 \
-DPYTHON3_LIBRARY=/usr/lib/aarch64-linux-gnu/libpython3.9.so \
-DPYTHON3_NUMPY_INCLUDE_DIRS=/usr/lib/python3.9/dist-packages/numpy/core/include/ \
-DBUILD_DOCS=OFF \
-DBUILD_EXAMPLES=OFF \
-DBUILD_TESTS=OFF \
-DBUILD_PERF_TESTS=OFF \
..用make进行编译
bash
sudo make -j4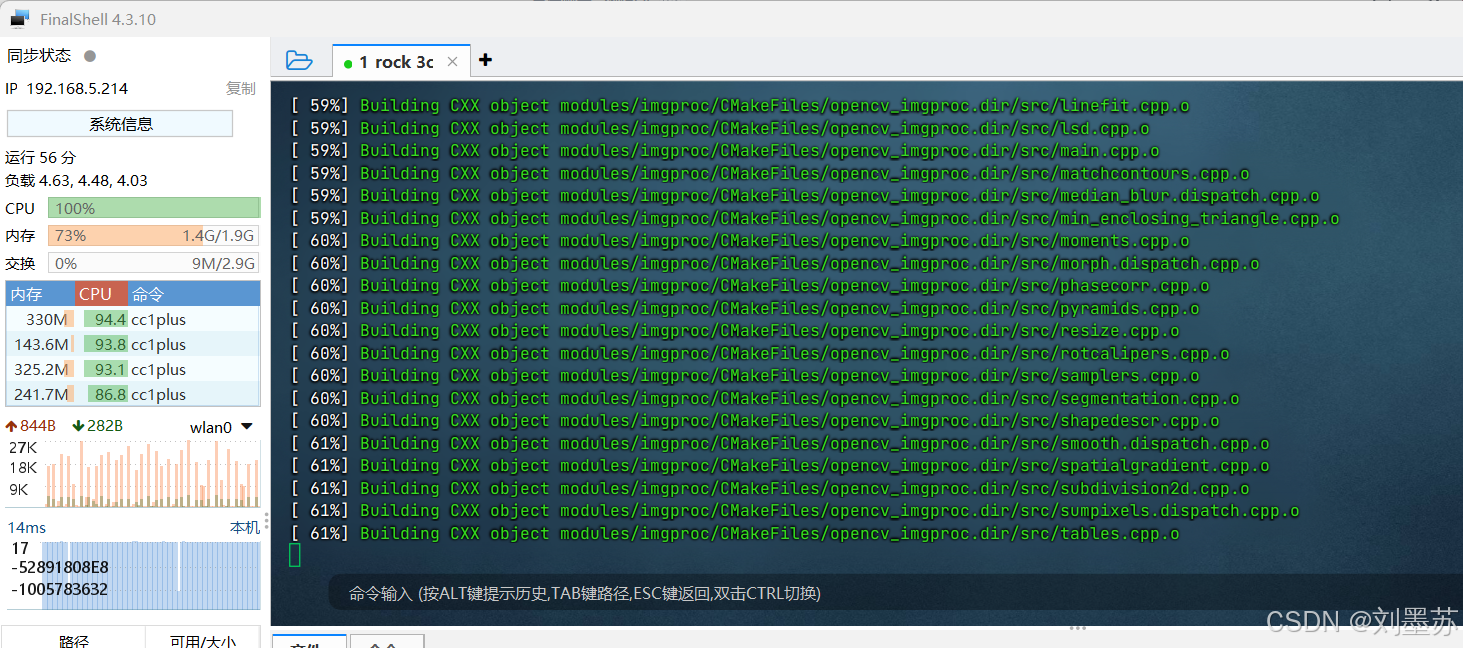
等待编译完成,进行安装
bash
sudo make install4.3 编译参考链接
https://mp.weixin.qq.com/s/3v65UUPK0sYsuEulTngxvw
https://blog.csdn.net/Datapad/article/details/115965665
5、使用opencv调用树莓派摄像头模块V2
查看信息:
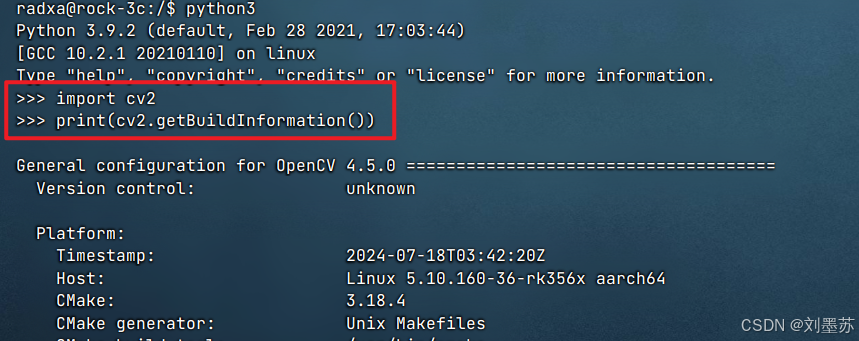
bash
import cv2
pipeline = "v4l2src ! video/x-raw, width=640, height=480, framerate=15/1 ! videoconvert ! videoscale ! video/x-raw, width=640, height=480 ! appsink"
# cap = cv2.VideoCapture(pipeline, cv2.CAP_V4L)
cap = cv2.VideoCapture(pipeline, cv2.CAP_GSTREAMER)
while True:
ret, frame = cap.read()
if ret:
cv2.imshow("frame", frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()