在高级驾驶辅助系统(ADAS)领域,存在多种常用的坐标系:雷达Lidar坐标系、车辆坐标系、相机坐标系、图像坐标系。
旋转变换矩阵(Rotation M atrix)
在二维平面xoy上,由绿色坐标系逆时针 旋转θ°到蓝色坐标系 。可以看到,点A是没有移动的,变化的是点A分别在前后两个坐标系中的坐标,即从变换到了
。

如图1中黑色虚线的分解方式所示,通过矢量分解 (类似于物理中力、速度等矢量的分解),将绿色坐标系 中的分别分解到蓝色坐标系的x轴和y轴上,可以得到:
用矩阵表示为:
其中R则为二维情形下的旋转变换矩阵,它表示了A点在前后坐标系中的值的映射关系。
三维情形
有了上述在二维平面旋转的基础,三维空间的旋转矩阵也就不难得出了。
即绕x轴,y轴,z轴分别进行旋转。最后将这三个旋转变换矩阵相乘,就能得到在三维空间任意角度的旋转变换矩阵了。(xyz轴满足右手系关系)
在绕x轴 旋转的时候,可以看作在yoz二维平面上的旋转,此时x的值不变。
在绕y轴 旋转的时候,可以看作在zox二维平面上的旋转,此时y的值不变。
在绕z轴 旋转的时候,可以看作在xoy二维平面上的旋转,此时z的值不变。
最终的三维旋转变换矩阵就是上面三个矩阵相乘,意为三维坐标系分别绕x轴、y轴和z轴旋转相应的角度。
正交矩阵
向量正交
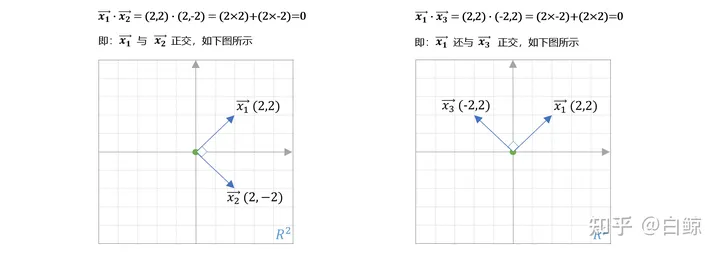
首先先明白什么是在解析几何中的概念,向量正交是指:若两个同维向量 的点乘(也叫:数量积)为0,则两个向量正交(也叫垂直),即:在平面直角坐标系中
的点乘(也叫:数量积)为0,则两个向量正交(也叫垂直),即:在平面直角坐标系中  相互垂直(夹角为90度)。
相互垂直(夹角为90度)。
例:假设存在三个向量,分别为:
正交矩阵
如果把正交的向量,按列向量的形式放进一个花括号内,即组成了一个正交向量组。那么该正交向量组中的向量,均两两相互垂直(也就是任意拿出两个向量来做点乘都=0)。
例:假设存在4个向量,分别为: 

正交基
基向量是构成向量空间的一个向量组(坐标系),该向量组内的向量是线性无关的(若两两正交,则必定线性无关),并且通过它们的线性组合可以表示整个向量空间中的任意向量。
在此基础上,若基向量组内的向量两两正交,则称作:正交基,如下图所示:
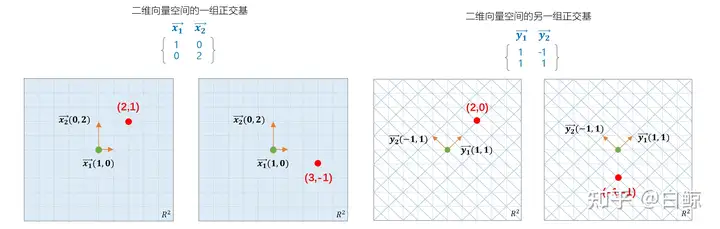
特别的:若基向量组内的向量两两正交,且向量长度均为1,则称作:标准正交基。
向量组转矩阵
矩阵是一种数据结构,简单来说就是一张数表,往格子里填入相应的数字就能视作一个矩阵,所以向量组可以视作矩阵。那么,我们把上面的正交向量组视作矩阵:

正交矩阵
当正交向量组转为矩阵后,我们就可以用矩阵的视角来重新看待"正交向量组"
例1:是几行几列的矩阵?是不是方阵?
例2:矩阵的秩是多少?矩阵是否可逆?
至此,最核心的问题是:什么样的矩阵才能称作正交矩阵?
第一点:必须是一个方阵,即n行n列;
第二点:矩阵中的每一列若视作向量,则这些向量均两两相互垂直;
第三点**:矩阵中的每一列若视作向量,则这些向量的长度均为1;**
同时满足这3点,即为一个正交矩阵。让我们来看一些例子:

数学定义及性质
1、数字定义:
若一个方阵 是正交矩阵,当且仅当它的转置矩阵与自身的乘积等于单位矩阵
是正交矩阵,当且仅当它的转置矩阵与自身的乘积等于单位矩阵
另一种等价的定义是:若方阵是正交矩阵,当且仅当的列向量是两两正交的单位向量。
2、数学特性
1、正交矩阵的逆: ,正交矩阵的转置 = 正交矩阵的逆
,正交矩阵的转置 = 正交矩阵的逆
2、正交矩阵的行列式: 行列式的取值只有两种可能(1)或(-1)
3、向量正交:将 视作由若干行向量组成,则这些行向量两两相互正交,若将视作由若干列向量组成,则这些列向量也两两相互正交
视作由若干行向量组成,则这些行向量两两相互正交,若将视作由若干列向量组成,则这些列向量也两两相互正交