2.2 视觉SLAM 实践:Eigen
Eigen 是一个 C++ 开源线性代数库。它提供了快速的有关矩阵的线性代数运算,还包括解方程等功能。许多上层的软件库也使用 Eigen 进行矩阵运算,包括 g2o、Sophus 等。
1. 安装Eigen
大部分常用的库都已经在 Ubuntu 软件源中提供,不妨先搜索 Ubuntu 的软件源是否已经提供:
cpp
rosnoetic@rosnoetic-VirtualBox:~$ sudo updatedb
rosnoetic@rosnoetic-VirtualBox:~$ locate eigen3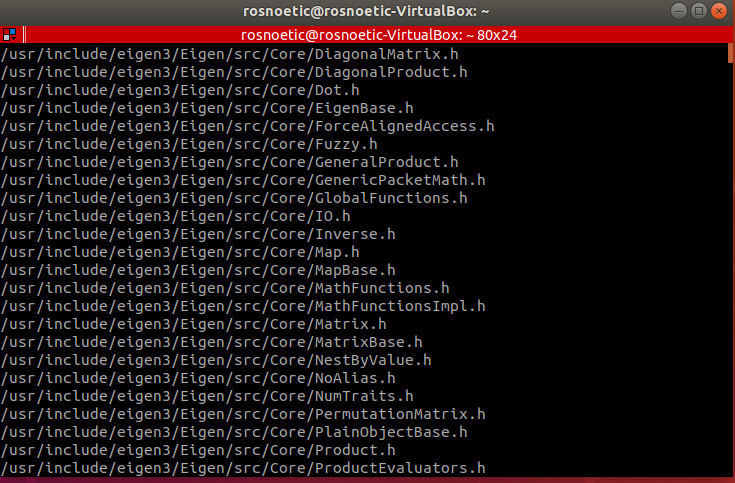
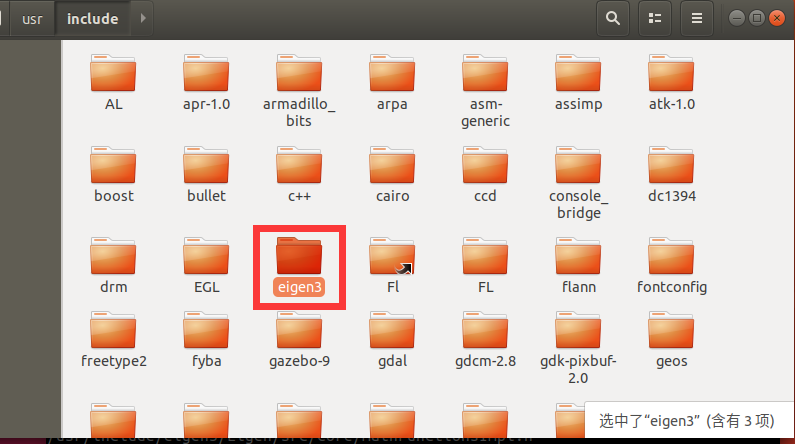
Eigen头文件的默认位置在"/usr/include/eigen3"中,如下所示:
如果没有安装Eigen,可以输入如下命令进行安装:
cpp
rosnoetic@rosnoetic-VirtualBox:~$ sudo apt-get install libeigen3-dev2. 编写 eigenMatrix 函数
2.1 创建文件夹
通过终端创建一个名为eigenMatrix的文件夹以保存我们的VSCode项目,在/eigenMatrix目录下打开vscode。
cpp
rosnoetic@rosnoetic-VirtualBox:~$ mkdir -p eigenMatrix
rosnoetic@rosnoetic-VirtualBox:~$ cd eigenMatrix/
rosnoetic@rosnoetic-VirtualBox:~/eigenMatrix$ code .2.2 编写源代码
新建文件eigenMatrix.cpp
在eigenMatrix.cpp粘贴如下代码并保存(Ctrl+S)
cpp
#include <iostream>
using namespace std;
#include <ctime>
// Eigen核心部分
#include <Eigen/Core>
// 稠密矩阵的代数运算(逆、特征值等)
#include <Eigen/Dense>
using namespace Eigen;
#define MATRIX_SIZE 100
/*
本程序演示了Eigen基本类型的使用
*/
int main(int argc, char argv) {
// Eigen中所有向量和矩阵都是Eigen::Matrix,它是一个模板类。它的前三个参数为数据类型、行、列
// 声明一个 2*3 的float矩阵
Matrix<float, 2, 3> matrix_23;
// 同时,Eigen通过Typedef提供了许多内置类型,不过底层都是Eigen::Matrix
// 例如,Vector3d实质上是Eigen::Matrix<double,3,1>,即三维向量
Vector3d v_3d;
// 这是一样的
Matrix<float, 3, 1> vd_3d;
// Matrix3d实质上是Eigen::Matrix<double, 3, 3>
Matrix3d matrix_33 = Matrix3d::Zero(); // 初始化为0
// 如果不确定矩阵大小,可以使用动态大小的矩阵
Matrix<double, Dynamic, Dynamic> matrix_dynamic;
// 更简单的
MatrixXd martix_x;
// 下面是对Eigen阵的操作
// 输入数据(初始化)
matrix_23 << 1, 2, 3, 4, 5, 6;
// 输出
cout << "matrix 2x3 from 1to 6: \n" << matrix_23 << endl;
// 用()访问矩阵中的元素
cout << "print matrix 2x3: "<< endl;
for (int i = 0; i <2; i++) {
for (int j = 0; j < 3; j++) {
cout << matrix_23(i,j) << "\t";
}
cout << endl;
}
// 矩阵和向量相乘
v_3d << 1, 2, 3;
vd_3d << 4, 5, 6;
// 在Eigen里不能混合两种不同类型的矩阵,需要对类型进行显示的转换
Matrix<double, 2, 1> result = matrix_23.cast<double>() * v_3d;
cout << "[1,2,3;4,5,6] * [1,2,3]=" << result.transpose() << endl;
// matrix_23的数据格式为float,vd_3d的数据格式为float,所以无需进行格式转换
Matrix<float, 2, 1> result2 = matrix_23 * vd_3d;
cout << "[1,2,3;4,5,6] * [4,5,6]=" << result2.transpose() << endl;
// 矩阵运算
// 随机数矩阵
matrix_33 = Matrix3d::Random();
cout << "random matrix: \n" << matrix_33 << endl;
cout << "transpose:\n" << matrix_33.transpose() << endl; // 转置
cout << "sum:\n" << matrix_33.sum() << endl; // 各元素和
cout << "trace:\n" << matrix_33.trace() << endl; // 迹
cout << "times:\n" << 10*matrix_33 << endl; // 数乘
cout << "inverse:\n" << matrix_33.inverse() << endl; // 逆
cout << "det:" << matrix_33.determinant() << endl; // 行列式
// 特征值
// 实对称矩阵可以保证对角化成功
// SelfAdjointEigenSolver是一个类,用于求解对称正定矩阵的特征值和特征向量
SelfAdjointEigenSolver<Matrix3d> eigen_solver(matrix_33.transpose() * matrix_33);
cout << "Eigen values = \n" << eigen_solver.eigenvalues() << endl;
cout << "Eigen vectors = \n" << eigen_solver.eigenvectors() << endl;
// 解方程
// 我们求解方程 matrix_NN * x = v_Nd
// N的大小由前面的宏定义MATRIX_SIZE设置
// 直接求逆自然是最直接的,但是运算量大
Matrix<double, MATRIX_SIZE, MATRIX_SIZE> matrix_NN = MatrixXd::Random(MATRIX_SIZE, MATRIX_SIZE);
matrix_NN = matrix_NN.transpose() * matrix_NN; // 保证半正定
Matrix<double,MATRIX_SIZE,1> v_Nd = MatrixXd::Random(MATRIX_SIZE,1);
clock_t time_stt = clock(); // 计时
// 直接求逆
Matrix<double,MATRIX_SIZE,1> x = matrix_NN.inverse() * v_Nd;
cout << "time of normal inverse is " << 1000 * (clock() - time_stt)/(double) CLOCKS_PER_SEC << "ms" << endl;
cout << "x=" << x.transpose() << endl;
// 通常采用矩阵分解法来求解,例如QR分解,速度会快很多
time_stt = clock();
x = matrix_NN.colPivHouseholderQr().solve(v_Nd);
cout << "time of Qr decomposition is " << 1000 * (clock() - time_stt)/(double) CLOCKS_PER_SEC << "ms" << endl;
cout << "x=" << x.transpose() << endl;
return 0;
}
在程序撰写过程中,我们注意到了其需要使用cast进行类型转换,这是因为Eigen不支持自动类型提升,这和C++的内建数据类型有较大差异。
3. 新建 CMakeLists.txt 文件
新建CMakeLists.txt文件
在CMakeLists.txt中添加如下内容:
cpp
# 声明要求的cmake最低版本
cmake_minimum_required(VERSION 2.8 )
# 声明一个cmake工程
project(EigenMATRIX)
# 添加头文件
include_directories("/usr/include/eigen3")
# 添加一个可执行文件
add_executable(eigenMatrix eigenMatrix.cpp)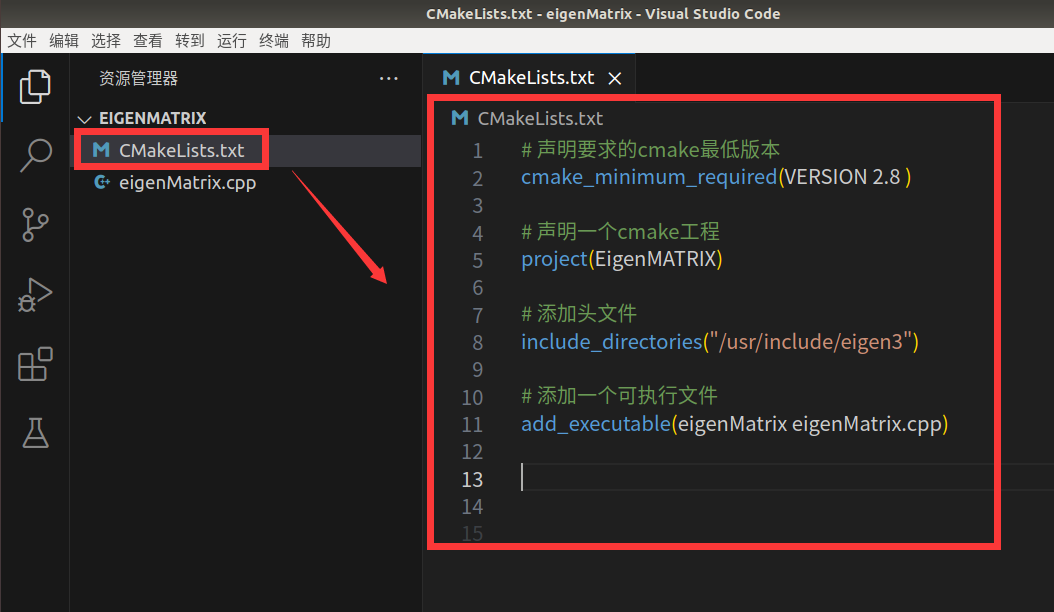
值得注意的是,与其他库相比,Eigen 的特殊之处在于,它是一个纯用头文件搭起来的库。这意味着只能找到它的头文件,而没有类似.so或.a的二进制文件。在使用时,只需引入Eigen的头文件即可,不需要链接库文件。
4. cmake 编译
ctrl+alt+T打开终端,执行如下指令进行cmake编译
cpp
rosnoetic@rosnoetic-VirtualBox:~$ cd eigenMatrix/
rosnoetic@rosnoetic-VirtualBox:~/eigenMatrix$ mkdir build
rosnoetic@rosnoetic-VirtualBox:~/eigenMatrix$ cd build/
rosnoetic@rosnoetic-VirtualBox:~/eigenMatrix/build$ cmake ..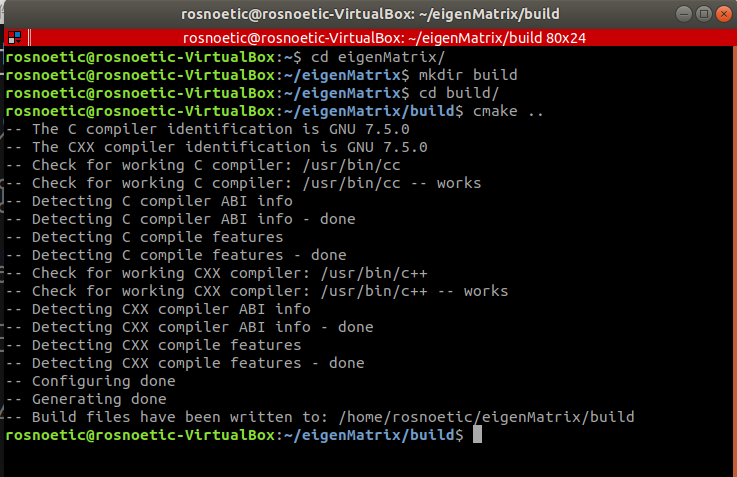
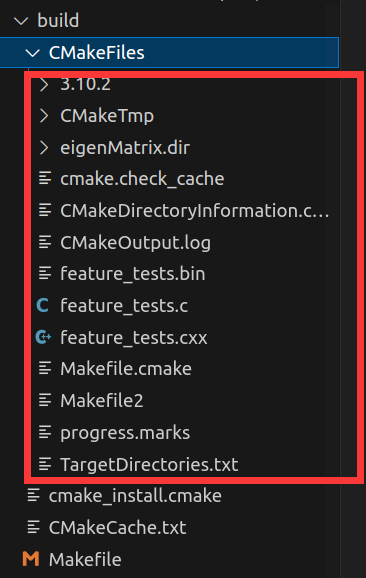
我们新建了一个中间文件夹"build",然后进入build文件夹,通过cmake ..命令对上一层文件夹,也就是代码所在的文件夹进行编译。这样,cmake产生的中间文件就会生成在build文件夹中,如下图所示,和源代码分开。

接着make对工程进行编译
cpp
rosnoetic@rosnoetic-VirtualBox:~/eigenMatrix/build$ make
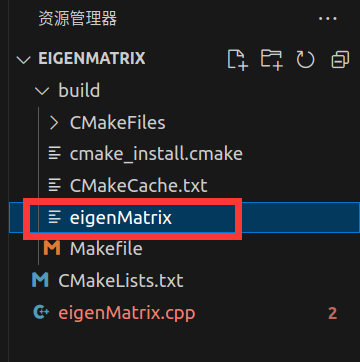
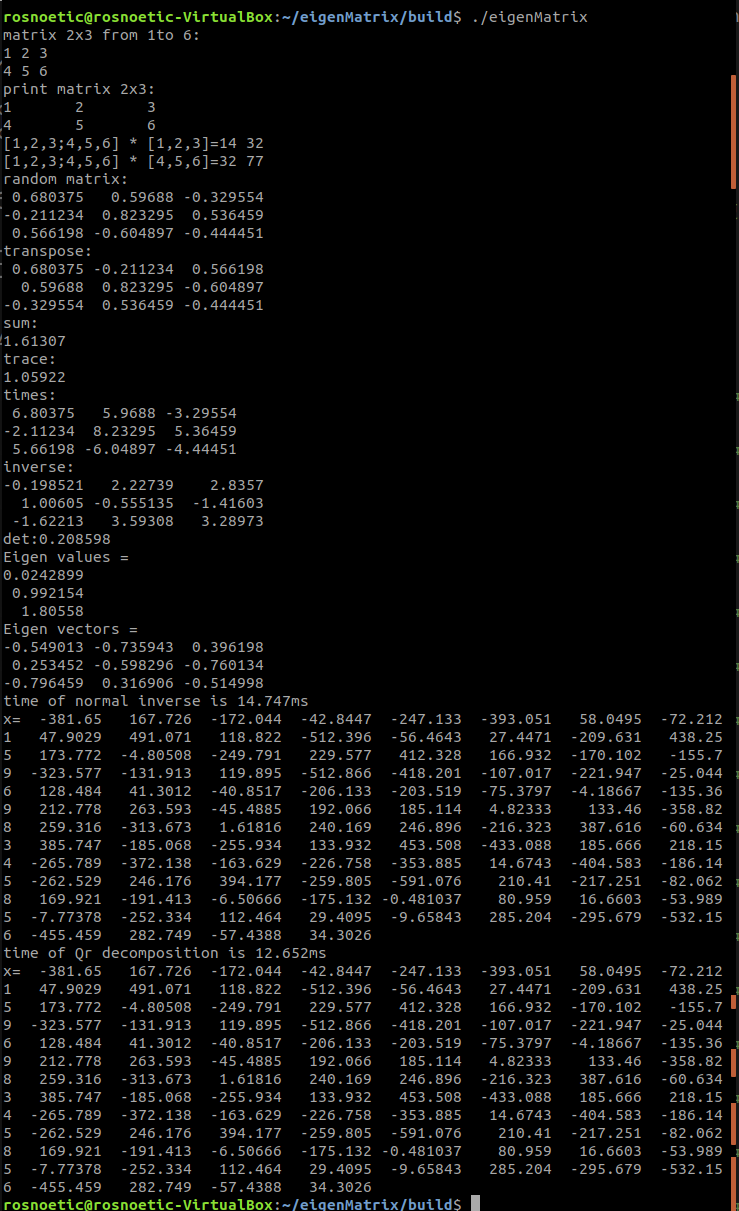
进一步的调用可执行文件:
cpp
rosnoetic@rosnoetic-VirtualBox:~/eigenMatrix/build$ ./eigenMatrix