请先看【专栏介绍文章】:【图像去噪(Image Denoising)】关于【图像去噪】专栏的相关说明,包含适配人群、专栏简介、专栏亮点、阅读方法、定价理由、品质承诺、关于更新、去噪概述、文章目录、资料汇总、问题汇总(更新中)
本文亮点:
- 实现三种xUnit模块:xUnit(论文默认)、xUnitS(轻量化)、xUnitD(密集型),随取随用
- xUnit模块可以加入到任意去噪模型 中,替代ReLU激活函数
- 测试结果与论文中所述观点基本一致
文章目录
前言
论文题目:xUnit: Learning a Spatial Activation Function for Efficient Image Restoration ------ xUnit:学习空间激活函数进行高效图像恢复
论文地址:xUnit: Learning a Spatial Activation Function for Efficient Image Restoration
论文源码:https://github.com/kligvasser/xUnit
对应的论文精读:【图像去噪】论文精读:xUnit: Learning a Spatial Activation Function for Efficient Image Restoration
只需要源码中的xUnit结构实现,并不需要其他的。本文将xUnit模块插入到DnCNN中实现xDnCNN。
一、xUnit结构实现
xUnit结构回顾:

- xUnit默认结构:BN+RL+CD+BN+GS
- xUnit轻量结构:CD+BN+GS
- xUnit密集结构:CD+BN+RL+CD+BN+GS
代码实现如下,命名为activations.py:
python
import torch.nn as nn
class xUnit(nn.Module):
def __init__(self, num_features=64, kernel_size=9, batch_norm=False):
super(xUnit, self).__init__()
# xUnit
self.features = nn.Sequential(
nn.BatchNorm2d(num_features=num_features) if batch_norm else Identity,
nn.ReLU(),
nn.Conv2d(in_channels=num_features, out_channels=num_features, kernel_size=kernel_size, padding=(kernel_size // 2), groups=num_features),
nn.BatchNorm2d(num_features=num_features) if batch_norm else Identity,
nn.Sigmoid()
)
def forward(self, x):
a = self.features(x)
r = x * a
return r
class xUnitS(nn.Module):
def __init__(self, num_features=64, kernel_size=9, batch_norm=False):
super(xUnitS, self).__init__()
# slim xUnit
self.features = nn.Sequential(
nn.Conv2d(in_channels=num_features, out_channels=num_features, kernel_size=kernel_size, padding=(kernel_size // 2), groups=num_features),
nn.BatchNorm2d(num_features=num_features) if batch_norm else Identity(),
nn.Sigmoid()
)
def forward(self, x):
a = self.features(x)
r = x * a
return r
class xUnitD(nn.Module):
def __init__(self, num_features=64, kernel_size=9, batch_norm=False):
super(xUnitD, self).__init__()
# dense xUnit
self.features = nn.Sequential(
nn.Conv2d(in_channels=num_features, out_channels=num_features, kernel_size=1, padding=0),
nn.BatchNorm2d(num_features=num_features) if batch_norm else Identity(),
nn.ReLU(),
nn.Conv2d(in_channels=num_features, out_channels=num_features, kernel_size=kernel_size, padding=(kernel_size // 2), groups=num_features),
nn.BatchNorm2d(num_features=num_features) if batch_norm else Identity(),
nn.Sigmoid()
)
def forward(self, x):
a = self.features(x)
r = x * a
return r
class Identity(nn.Module):
def __init__(self,):
super(Identity, self).__init__()
def forward(self, x):
return x二、xDnCNN结构实现
先回顾以下DnCNN的网络结构:

代码实现如下:
python
class DnCNN(nn.Module):
def __init__(self, num_layers=17, num_features=64):
super(DnCNN, self).__init__()
layers = [nn.Sequential(nn.Conv2d(3, num_features, kernel_size=3, stride=1, padding=1),
nn.ReLU(inplace=True))]
for i in range(num_layers - 2):
layers.append(nn.Sequential(nn.Conv2d(num_features, num_features, kernel_size=3, padding=1),
nn.BatchNorm2d(num_features),
nn.ReLU(inplace=True)))
layers.append(nn.Conv2d(num_features, 3, kernel_size=3, padding=1))
self.layers = nn.Sequential(*layers)
self._initialize_weights()
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight)
elif isinstance(m, nn.BatchNorm2d):
nn.init.ones_(m.weight)
nn.init.zeros_(m.bias)
def forward(self, inputs):
y = inputs
residual = self.layers(y)
return y - residual上面是一个17层的DnCNN实现,使用xUnit代替DnCNN中的ReLU,同时减少卷积层数为9层,称作xDnCNN。
实现如下:
python
from torch import nn
from activations import xUnit, xUnitD, xUnitS
class xDnCNN(nn.Module):
def __init__(self, num_layers=9, num_features=64):
super(xDnCNN, self).__init__()
layers = [nn.Sequential(nn.Conv2d(3, num_features, kernel_size=3, stride=1, padding=1),
xUnit(num_features, batch_norm=True))]
for i in range(num_layers - 2):
layers.append(nn.Sequential(nn.Conv2d(num_features, num_features, kernel_size=3, padding=1),
nn.BatchNorm2d(num_features),
xUnit(num_features, batch_norm=True)))
layers.append(nn.Conv2d(num_features, 3, kernel_size=3, padding=1))
self.layers = nn.Sequential(*layers)
self._initialize_weights()
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight)
elif isinstance(m, nn.BatchNorm2d):
nn.init.ones_(m.weight)
nn.init.zeros_(m.bias)
def forward(self, inputs):
y = inputs
residual = self.layers(y)
return y - residual至此,xUnit模块嵌入了模型中,除了DnCNN,其他有ReLU激活的模型都可以以此方法替代。
DnCNN于xDnCNN结构对比:
- DnCNN:Conv+ReLU+15个Conv+BN+ReLU+Conv,共17个卷积层,16个ReLU,15个BN
- xDnCNN:Conv+xUnit(BN+ReLU+Conv+BN+Sigmoid)+7个Conv+BN+xUnit(BN+ReLU+Conv+BN+Sigmoid) + Conv,共17个卷积层,8个ReLU,23个BN
区别为:xDnCNN少了8个ReLU,多了8个BN,并且xUnit中的Conv卷积核为9×9,而其他均为3×3。
虽然模型性能区别不能简单地以模块数量多少而论,但也能从中发现一些端倪。
- 卷积层个数相同,卷积核越大,参数不一定越多。也受整体层数影响,卷积核更大,整体层数更少,虽然在单层的参数量更多,但总体的参数量更少。
- 本质上,是增大感受野以增强特征提取能力(论文图5、图9)。只是套了这么一个xUnit的壳,实际上就是改变结构,只不过把这一堆统称为xUnit。
- 给我们的启示:尝试把一堆组件绑在一起作为一个整体,调整其中的某个参数(e.g.卷积核,就可以减少整体层数了),看看能不能有所提升。
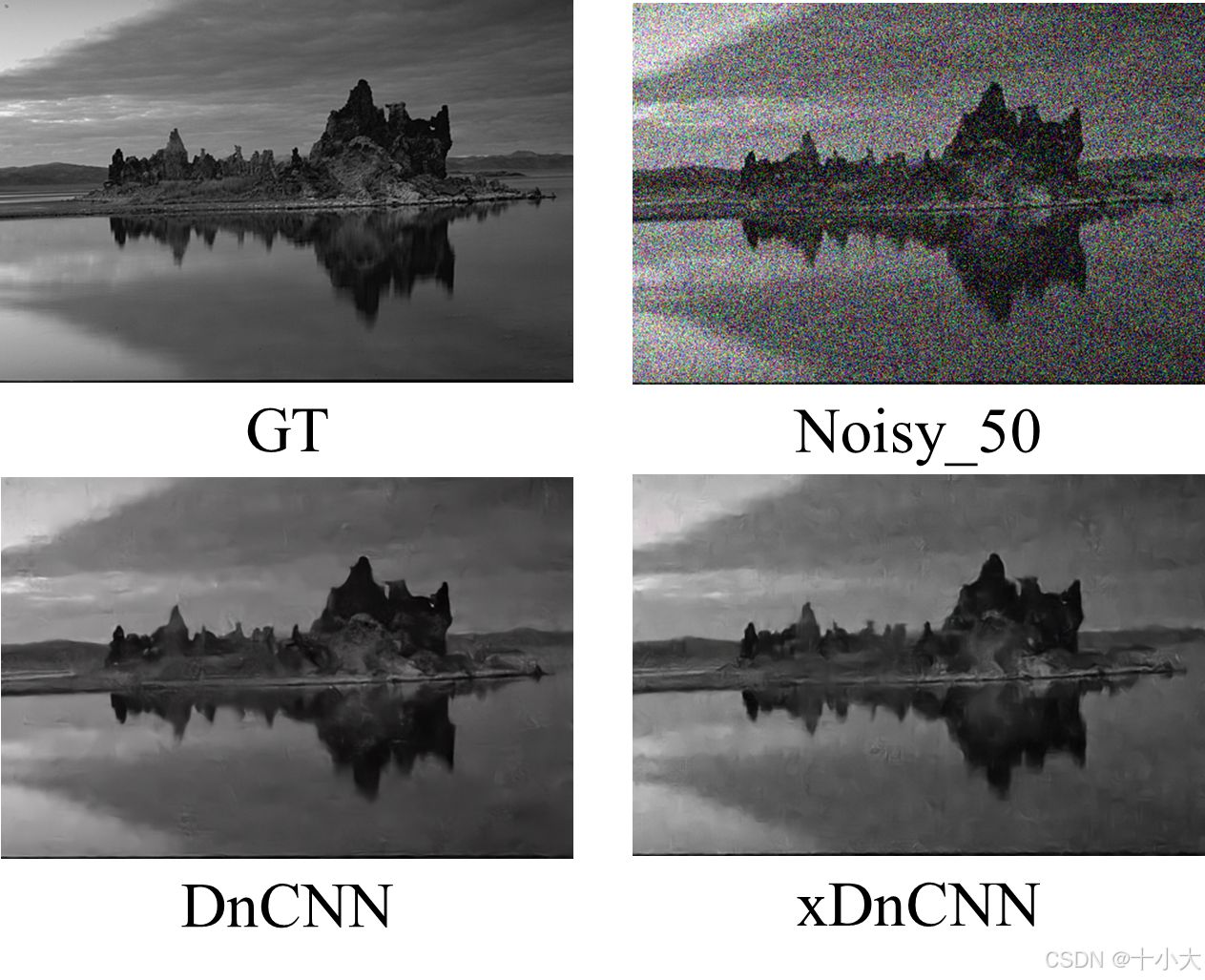
xUnit的作用:减少模型参数、性能几乎不变、纹理细节提升!
三、结果展示
性能对比:
|------------|--------------|--------|
| Methods | DnCNN-S | xDnCNN |
| parameters | 559363(559K) | 29.08 |
| σ=50 | 306947(307K) | 29.03 |
视觉展示(论文图7):
至此本文结束。
如果本文对你有所帮助,请点赞收藏,创作不易,感谢您的支持!