写在前面:
🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落 。📝
个人主页 :清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。🔍 本文系 清流君 原创之作,荣幸在CSDN首发🐒
若您觉得内容有价值,还请评论告知一声,以便更多人受益。
转载请注明出处,尊重原创,从我做起。👍 点赞、评论、收藏 ,三连走一波,让我们一起养成好习惯😜
在这里,您将收获的不只是技术干货 ,还有思维的火花!📚 系列专栏:【运动控制】系列,带您深入浅出,领略控制之美。🖊
愿我的分享能为您带来启迪,如有不足,敬请指正,让我们共同学习,交流进步!🎭 人生如戏,我们并非能选择舞台和剧本,但我们可以选择如何演绎 🌟
感谢您的支持与关注,让我们一起在知识的海洋中砥砺前行~~~
文章目录
- 引言
- 一、控制算法编程基础
- 二、Carsim配置
- 三、路径规划与轨迹生成
- 四、模型搭建与仿真运行
-
- 1、变量准备
- 2、预测模块实现
- 3、误差和曲率计算模块实现
- [4、AB模块 + LQR模块](#4、AB模块 + LQR模块)
- 5、前馈模块实现
- 6、避免代数环的延迟模块
- 7、仿真测试
- 五、总结
- 参考资料
引言
本篇博客是 自动驾驶控制算法 系列的第八节第Ⅲ部分。内容整理自 B站知名up主 忠厚老实的老王 的视频,作为博主的学习笔记,分享给大家共同学习。
本篇博客是最长的一节,主要讲解如何搭建模型。
大家有需要可以自己下载相关的代码模型,主页链接如下:
一、控制算法编程基础
在开始本节之前,首先要把第八节的第二部分 Carsim 设置给设置完毕。具体操作见第八节第Ⅱ部分:
【自动驾驶】控制算法(八)横向控制Ⅱ | Carsim 与 Matlab 联合仿真基本操作
在开始本节之前,首先要有算法准备,就是第八讲第一节的编程基础内容:
编程就是照着算法流程图编写程序:

这是整个编程的核心,横向控制算法主要需要三类参数:
- 整车参数
- 车辆当前状态
- 规划轨迹信息
二、Carsim配置
1、整车参数获取与侧偏刚度计算
整车参数可以在Carsim软件里读取,可得到质量 m m m、质心到前后轮的距离 a a a、 b b b 以及惯量 I I I 之类的数据。
注意:质量只是弹簧上质量,不包括悬架质量,所以
车辆总质量 = 簧上质量 + 前后两个悬架质量 车辆总质量=簧上质量+前后两个悬架质量 车辆总质量=簧上质量+前后两个悬架质量 其他参数在软件里可以读取到,包括根据曲线估算的侧偏刚度。侧偏刚度可以不用计算特别准,只要估算出大概值即可。
计算侧偏刚度,先大概估计四轮垂向力的大小,在表上查垂向力对应的曲线,求斜率。
注意 :侧偏刚度的单位是 N / r a d N/rad N/rad,且为负值。
当输入时,算法是牛每弧度,要进行单位换算,并且所有侧偏刚度都要乘以 2 2 2,因为是自行车模型,把两个轮胎并成一个轮胎。在这里算出来的侧偏刚度是正的,但是当输入进软件里时,侧偏刚度是负的。
注意:把风阻、空气动力学关掉。
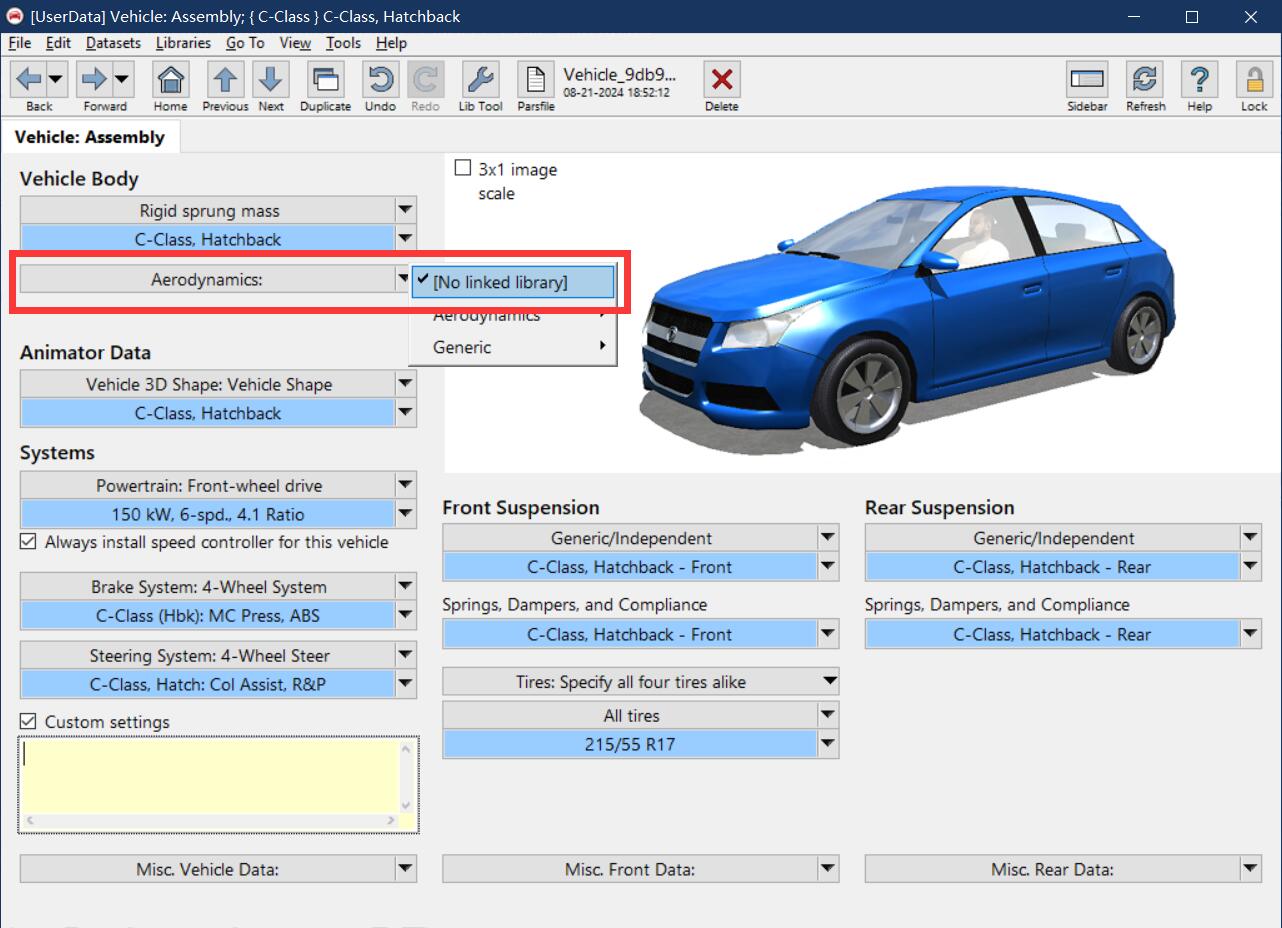
暂时不考虑风阻,先简单再复杂,把空气动力学关掉。
其实风阻在控制中是很要命的因素,特别是在高速时,空气阻力会极大影响车轮的垂向力,垂向力变化,侧偏刚度就变了,导致 LQR 相关东西全都变了,所以风阻是很重要的因素,但如果讲风阻就太复杂了,先暂时先不考虑风阻,等以后学到时再去考虑风阻。
2、车辆状态与规划轨迹信息
回到流程图,除了整车参数,算法还需要车辆状态,也就是 ( x , y , φ , v x , v y , φ ˙ ) (x,y,\varphi ,v_x,v_y,\dot{\varphi}) (x,y,φ,vx,vy,φ˙)。所以 Carsim 的输出中要添加 ( x , y , φ , v x , v y , φ ˙ ) (x,y,\varphi ,v_x,v_y,\dot{\varphi}) (x,y,φ,vx,vy,φ˙)

流程图的第三个输入是规划轨迹信息,包括 ( x r , y r , θ r , κ r ) \left( x_r,y_r,\theta _r,\kappa _r \right) (xr,yr,θr,κr),规划轨迹的横纵坐标、规划轨迹的切线与 x x x 轴方向夹角、规划曲线的曲率。
所以做控制时不仅仅写控制算法,还要写规划算法,先把模型的框架搭建立起来,点Send to Simulink。
三、路径规划与轨迹生成
1、路径规划代码概述
规划代码不是这一节的重点,所以规划代码已经事先写好了,看起来挺复杂,实际上就写了两个子函数,在设计路径时,调用这两个子函数把拼起来就可以了。规划代码如下:
routing_planning.m
matlab
count=50;
[x1,y1,theta1,kr1]=straight([0,0],[20,0],0,count);
[x2,y2,theta2,kr2]=arc([20,0],[30,10],0,pi/2,count);
[x3,y3,theta3,kr3]=arc([30,10],[40,20],pi/2,0,count);
[x4,y4,theta4,kr4]=arc([40,20],[40,40],0,pi,count);
[x5,y5,theta5,kr5]=arc([40,40],[35,35],pi,3*pi/2,count);
[x6,y6,theta6,kr6]=arc([35,35],[25,35],3*pi/2,pi/2,count);
[x7,y7,theta7,kr7]=arc([25,35],[15,35],pi/2,3*pi/2,count);
[x8,y8,theta8,kr8]=arc([15,35],[5,35],3*pi/2,pi/2,count);
[x9,y9,theta9,kr9]=arc([5,35],[-15,35],pi/2,3*pi/2,count);
[x10,y10,theta10,kr10]=straight([-15,35],[-15,15],3*pi/2,count);
[x11,y11,theta11,kr11]=arc([-15,15],[0,0],3*pi/2,2*pi,count);
xr=[x1,x2,x3,x4,x5,x6,x7,x8,x9,x10,x11];
yr=[y1,y2,y3,y4,y5,y6,y7,y8,y9,y10,y11];
thetar=[theta1,theta2,theta3,theta4,theta5,theta6,theta7,theta8,theta9,theta10,theta11];
kappar=[kr1,kr2,kr3,kr4,kr5,kr6,kr7,kr8,kr9,kr10,kr11];
scatter(xr,yr);
function[xr,yr,thetar,kr]=straight(init_coord,end_coord,init_angle,count)
delta_x=(end_coord(1)-init_coord(1))/(count-1);
delta_y=(end_coord(2)-init_coord(2))/(count-1);
for i=1:count
xr(i)=init_coord(1)+delta_x*i;
yr(i)=init_coord(2)+delta_y*i;
thetar(i)=init_angle;
kr(i)=0;
end
end
function[xr,yr,thetar,kr]=arc(init_coord,end_coord,init_angle,end_angle,count)
L=sqrt((init_coord(1)-end_coord(1))^2+(init_coord(2)-end_coord(2))^2);
R=L/sqrt(2*(1-cos(end_angle-init_angle)));
delta_angle=(end_angle-init_angle)/(count-1) ;
for i=1:count
if delta_angle>0
xr(i)=init_coord(1)-R*sin(init_angle)+R*sin(init_angle+delta_angle*(i-1));
yr(i)=init_coord(2)+R*cos(init_angle)-R*cos(init_angle+delta_angle*(i-1));
thetar(i)=init_angle+delta_angle*i;
kr(i)=1/R;
else
xr(i)=init_coord(1)+R*sin(init_angle)-R*sin(init_angle+delta_angle*(i-1));
yr(i)=init_coord(2)-R*cos(init_angle)+R*cos(init_angle+delta_angle*(i-1));
thetar(i)=init_angle+delta_angle*i;
kr(i)=-1/R;
end
end
end2、直线与圆弧子函数详解
具体讲一下这两个子函数该怎么用,这两个子函数的名字是直线、圆弧。代码上半部分的内容是拼起来的路径,也就是要用的路径,暂时先注释掉。
(1)直线函数使用方法
这两个子函数用起来很简单,比如想生成一段直线,起点是 ( 0 , 0 ) (0,0) (0,0),终点是 ( 5 , 0 ) (5,0) (5,0),角度是 π 4 \frac{\pi}{4} 4π,只需要直线函数就可以:
matlab
[xr,yr,~,~] = straight([0,0],[50,50],pi/4,10); 严格来说要写 θ r , κ r \theta_r,\kappa_r θr,κr,不过不需要的话就用 ~ 占位,生成这样一条离散路径点:

(2)圆弧函数使用方法
圆弧稍微复杂一点,需要输入起点坐标、终点坐标、起点角度、终点角度、点的数量。起点角度,终点角度表示点的切线方向与 x x x 轴的夹角。
matlab
[xr,yr,~,~] = arc([0,0],[50,50],0,pi/2,100); 比如这里起点角度是 0 ° 0° 0°,终点角度是 π 2 \frac{\pi}{2} 2π,运行结果如下:

此圆弧是典型左转圆弧,可以修改参数,比如把 π 2 \frac{\pi}{2} 2π 改成 − π 2 -\frac{\pi}{2} −2π,同样终点坐标要从 ( 50 , 50 ) (50,50) (50,50) 变成 ( 50 , − 50 ) (50,- 50) (50,−50),这样就变成右转圆弧。还可以修改点数量。
这两个子函数的作用就是给路径形状,能把 x r , y r , θ r , κ r x_r,y_r,\theta_r,\kappa_r xr,yr,θr,κr 直接算出来,很方便,在设计路径时,只要调用这两个接口,拼起来就可以了。可以自己设计这样的路径出来。
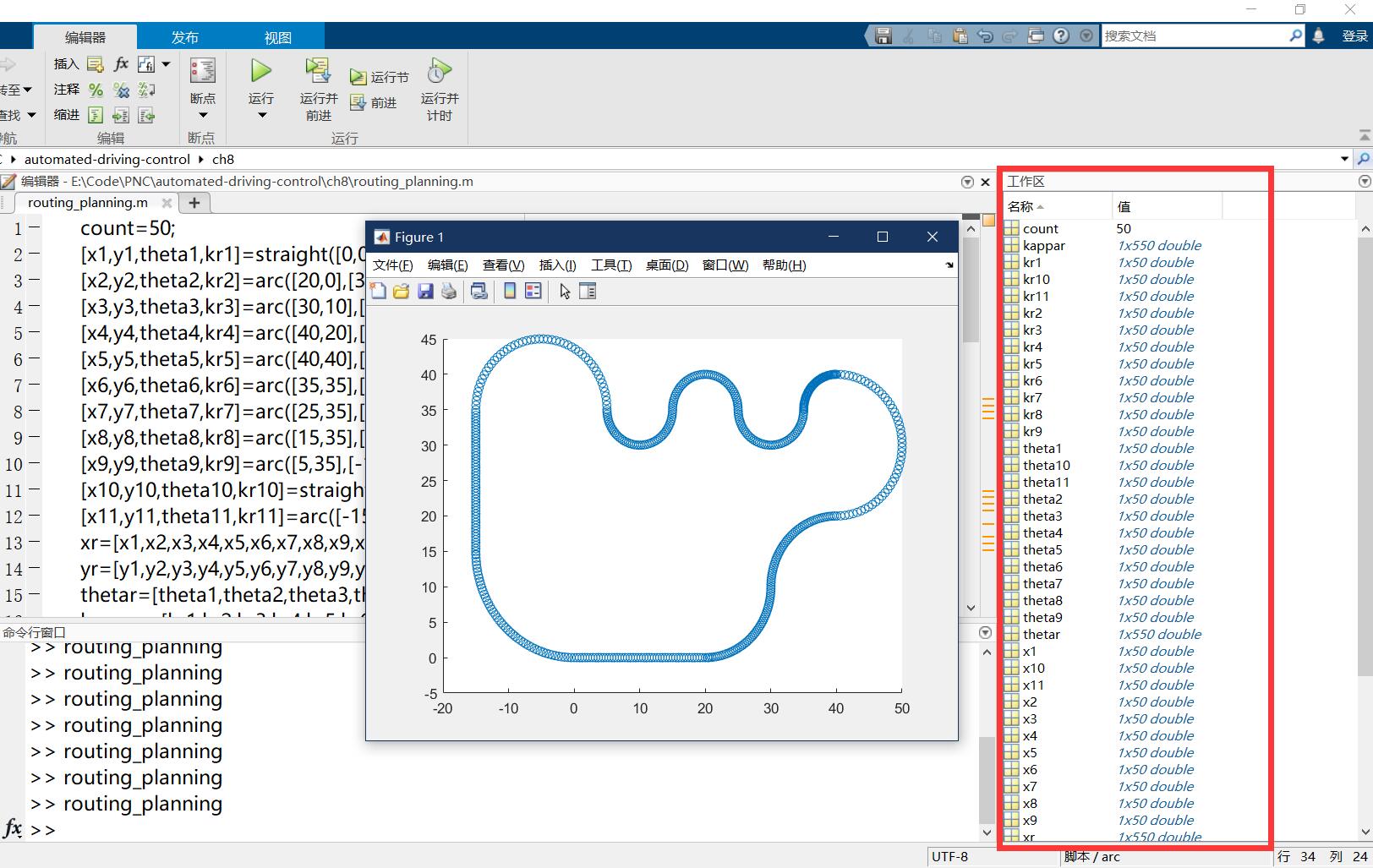
3、路径拼接实例
本篇博客所演示的路径比较复杂,各种直线和圆弧拼在一起,具体路径如下图所示:

每一段直线和圆弧都由 50 50 50 个点组成,比较复杂。这里的路径规划其实设计的很不合理,因为好的路径规划要保证曲率连续,但是本路径没有做到,就是简单的直线和圆弧的拼接,直线的曲率是 0 0 0,圆弧的曲率是 1 / 2 1/ 2 1/2,也就是曲率半径的倒数。
要设计比较好的路径,需要在直线和圆弧中间用回旋线做过渡,让曲率连续变化。但是因为规划并不是本篇博客的重点,所以就凑合用一用, count 是控制点的数量,选择点多一点的,这样控制效果相对会好一点。
4、Carsim路面设置
为了看起来更直观,把 Carsim 的路面也设置一下。
点Procedure,在 3D Road里面选 1200 1200 1200 米的道路:
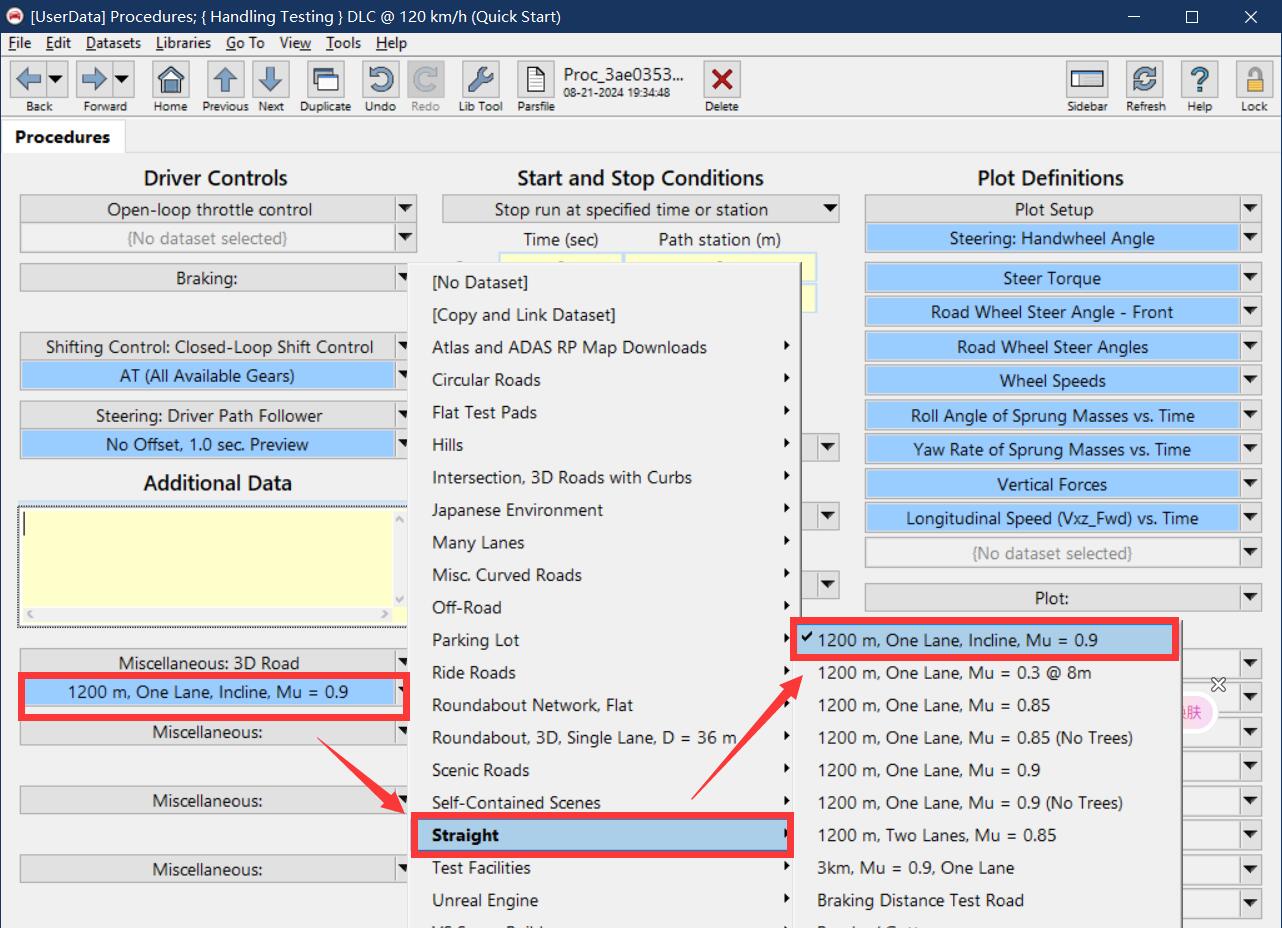
在车道这里选 two lines,再点 stretch east,在这里根据规划设计道路走向。

上图已经设置好。如果无法修改,先把右上角的锁点开,这样就可以修改了。如果没有 11 11 11 行这样的表,点右下角有Rows输入 11 11 11,就会有 11 11 11 行表格。表格的参数按上图填写即可, straight 代表直线, radius 代表圆弧。
圆弧转过的角度,即左转右转和规划的符号不一样,左转默认半径为正,右转默认半径为负。在规划代码里,若终点角度如果大于起点角度,就是左转;反之就是右转。在这里是根据半径来的,半径为负,就是右转;半径是正,就是左转。一定要把 Treat as loop 勾上,变成闭合曲线处理。
设计的道路挺扭曲,转弯半径非常小,最小的只有 5 m 5m 5m,而且在上面有连续五米的转弯半径,实际上对车辆的通过能力是很大的考验,因为转弯半径特别小,如果不是倒车,转弯半径一般最低也就 8 m 8m 8m。
而 5 m 5m 5m 的转弯半径已经特别陡了,所以设计的路径比较严苛,创建的道路如下图所示:

有很多连续弯道,路况算比较严苛。
四、模型搭建与仿真运行
1、变量准备
先跑一遍路径规划,就是Matlab变量工作区里要有路径才可以:
打开 Simulink 看一下控制模型,先做单位换算,把千米每小时换成米每秒,以及把角度换成弧度。建立 Matlab Function 模块,在里面编程。
这六个模块从逻辑顺序来上来说,从左往右写比较好,因为左边的输出是右边的输入,所以先写左边,再写右边。因此先写预测模块,在写代码之前先写上名字,因为模型比较复杂,先标上记号,要不然可能不知道哪根线对应哪个变量。
2、预测模块实现
预测模块的输入是当前点的 ( x , y , φ , v x , v y , φ ˙ ) (x,y,\varphi ,v_x,v_y,\dot{\varphi}) (x,y,φ,vx,vy,φ˙),输出为预测后的 ( x p r e , y p r e , φ p r e , v x p r e , v y p r e , φ ˙ p r e ) (x_{pre},y_{pre},\varphi_{pre} ,v_{xpre},v_{ypre},\dot{\varphi}_{pre}) (xpre,ypre,φpre,vxpre,vypre,φ˙pre)。照着预测模块的算法写,预测时间随便给个 0.1 0.1 0.1 秒。
predict_module
matlab
function [pre_x,pre_y,pre_phi,pre_vx,pre_vy,pre_phi_dot] = fcn(x,y,phi,vx,vy,phi_dot,ts)
pre_x=x+vx*ts*cos(phi)-vy*ts*sin(phi);
pre_y=y+vy*ts*cos(phi)+vx*ts*sin(phi);
pre_phi=phi+phi_dot*ts;
pre_vx=vx;
pre_vy=vy;
pre_phi_dot=phi_dot;
end3、误差和曲率计算模块实现
计算模块需要车辆状态,还需要规划轨迹信息。所以规划要先把它写好,而且写好之后也必须跑一遍,规划代码和控制代码是独立的。所以在规划时,需要先把代码跑一下,在工作区里要有这些规划的变量。
在工作区里有这些变量后,才能传到 Simlink 模型里,
注意 : ( x r , y r , θ r , κ r ) \left( x_r,y_r,\theta _r,\kappa _r \right) (xr,yr,θr,κr) 必须是行向量,不能是列向量。如果是列向量, Simlink 不识别,必须写成行向量形式。
下面可以开始写误差和曲率的计算模块,输入是 ( x , y , φ , v x , v y , φ ˙ ) (x,y,\varphi ,v_x,v_y,\dot{\varphi}) (x,y,φ,vx,vy,φ˙),以及规划的 ( x r , y r , θ r , κ r ) \left( x_r,y_r,\theta _r,\kappa _r \right) (xr,yr,θr,κr) ,输出是同一点的曲率以及误差。具体代码如下:
err_kappa_calculate_module
matlab
function [kr,err] = fcn(x,y,phi,vx,vy,phi_dot,xr,yr,thetar,kappar)
n=length(xr);%先找到规划轨迹的长度,共有多少个规划点
d_min=(x-xr(1))^2+(y-yr(1))^2;%把最短距离设为真实位置与第1个点。可以不用开平方根,减少计算量,因为并不关心距离是多少,只想找到最短点的序号
min=1;%先把最短点的序号设为1
for i=1:n%遍历所有的点
d=(x-xr(i))^2+(y-yr(i))^2;%计算它与真实的位置的之间的距离
if d<d_min%如果能找到比所设置的最短距离还要短
d_min=d;%将值赋为最短距离
min=i;%把序点的序号赋给min
end
end
%遍历一遍后,一定能找到最短的距离规划点的序号,其实就是选择排序法
dmin=min;
tor=[cos(thetar(dmin));sin(thetar(dmin))];
nor=[-sin(thetar(dmin));cos(thetar(dmin))];
d_err=[x-xr(dmin);y-yr(dmin)];
ed=nor'*d_err;
es=tor'*d_err;
%projection_point_thetar=thetar(dmin);%apollo
projection_point_thetar=thetar(dmin)+kappar(dmin)*es;%投影点的航向角
ed_dot=vy*cos(phi-projection_point_thetar)+vx*sin(phi-projection_point_thetar);
%%%%%%%%%
ephi=sin(phi-projection_point_thetar);%因为角度具有多值性,使用sin来消除因为多2pi或者少2pi而导致的算法出错
%%%%%%%%%
s_dot=vx*cos(phi-projection_point_thetar)-vy*sin(phi-projection_point_thetar);
s_dot=s_dot/(1-kappar(dmin)*ed);
ephi_dot=phi_dot-kappar(dmin)*s_dot;
kr=kappar(dmin);
err=[ed;ed_dot;ephi;ephi_dot];
end 代码写好后拼起来即可,其中规划轨迹点 ( x r , y r , θ r , κ r ) \left( x_r,y_r,\theta _r,\kappa _r \right) (xr,yr,θr,κr) ,用From Workspace 模块,从工作区里把变量导入到 Simlink 里必须要工作区里有 ( x r , y r , θ r , κ r ) \left( x_r,y_r,\theta _r,\kappa _r \right) (xr,yr,θr,κr) 才能导。在运行 Simlink 模型时,必须要先把规划代码运行一遍,在工作区里面有这些变量,才能导入,不然会出错。
注意 : From workspace 只能导行向量,能导列向量、不能导矩阵,也不能导结构体。实际上通过技巧操作可以导矩阵以及列向量,但省事点尽量变成行向量就可以了。
4、AB模块 + LQR模块
本来 LQR 模块应该最难写,也最复杂,但是很幸运 Matlab 自己有 LQR 模块包。用离线LQR,所以 LQR 变成了最好写的模块,而且 LQR 模块和 AB 计算模块是紧密联系的,所以把 AB 计算模块和 LQR 模块合在一起写。
先建立脚本文件,作为LQR离线查表的数据,代码如下:
lqr_offline.m
matlab
cf=-110000;%侧偏刚度根据曲线估算
cr=cf;%严格来说 CR 和 CF 应该不一样,但差别不大,所以近似认为一样
m=1412;%根据Carsim把整车参数输进去
Iz=1536.7;
a=1.015;
b=2.910-1.015;
k=zeros(5000,4);%申请矩阵k,用来存放LQR的k
for i=1:5000
vx=0.01*i;%只有vx是变量,所以每隔0.01米每秒,算一下对应的k。
%这样的话就可涵盖v从 0.01 米每秒到 v 等于 50 米每秒这么大范围内所有的 k
A=[0,1,0,0;
0,(cf+cr)/(m*vx),-(cf+cr)/m,(a*cf-b*cr)/(m*vx);
0,0,0,1;
0,(a*cf-b*cr)/(Iz*vx),-(a*cf-b*cr)/Iz,(a*a*cf+b*b*cr)/(Iz*vx)];
B=[0;
-cf/m;
0;
-a*cf/Iz];
Q=1*eye(4);
R=10;
k(i,:)=lqr(A,B,Q,R);
end
k1=k(:,1)';%建立四个变量,K1、K2、K3、K4,把表记录下来
k2=k(:,2)';%因为Simlink不能传矩阵,只能传行向量,需要做个转置
k3=k(:,3)';
k4=k(:,4)';有一种情况是要考虑到,车从零开始加速,启动开始跑,必然有一段速度在 0.01 0.01 0.01 秒之外,从 0 0 0 开始到 0.01 0.01 0.01,再从 0.01 0.01 0.01 到想要的速度,但如果 v x = 0 v_x=0 vx=0,代到 A A A 矩阵里, A A A 就变成奇异阵了,里面有无穷大。所以在 v < 0.01 v<0.01 v<0.01 情况下的 k k k,要进行另外处理,不能用LQR算,后面再讲。
算出来的 k k k 是由 5000 5000 5000 个行向量组成的矩阵:
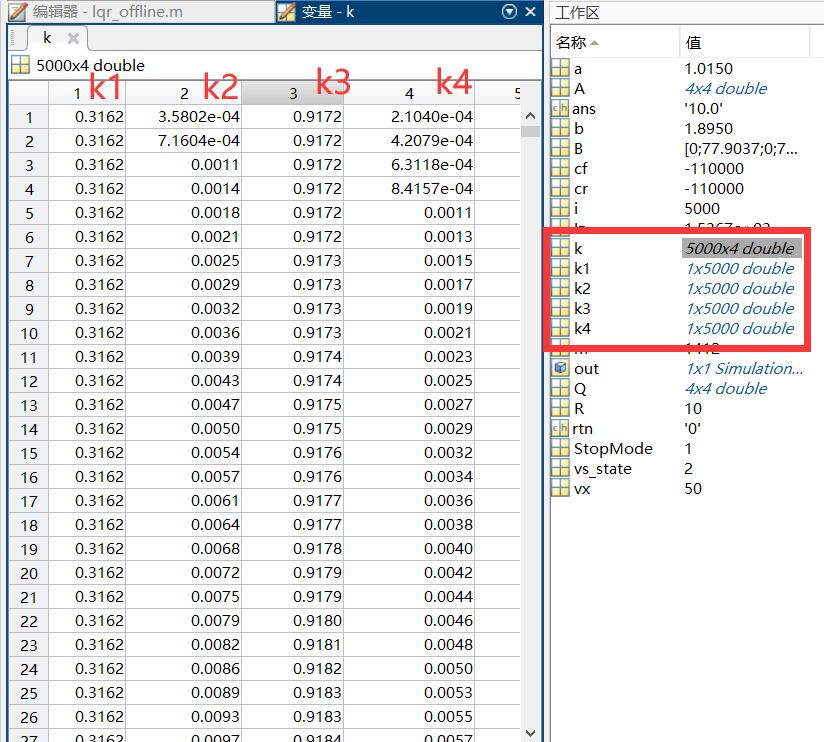
如何查表找和 v x v_x vx 的对应关系呢?
因为 v x v_x vx 很有规律,从 0.01 、 0.02 、 0.03 0.01、0.02、 0.03 0.01、0.02、0.03 一直增大,所以第一行 k k k 必然对应 0.01 m / s 0.01m/s 0.01m/s , 第 2 2 2 行对应 0.02 m / s 0.02m/s 0.02m/s ,以此类推,对应关系非常有规律。
比如假设速度为 20 m / s 20m/s 20m/s,只要让 20 20 20 除以 0.01 0.01 0.01 即可。
如果不在里面,比如速度是 20.12345678 20.12345678 20.12345678 这样的小数,对应哪个 k k k,用速度除 0.01 0.01 0.01,除出来是小数而不是整数,那怎么办呢?
解决方法就是四舍五入,把小数四舍五入变成整数。这样肯定有误差,但误差可忽略不计,因为 0.01 0.01 0.01 秒是非常小的间隔,在两个之间的 k k k 差别不是特别大,所以四舍五入即可。
LQR 算好之后,就可以写 LQR 模块。LQR 模块由 K 1 、 K 2 、 K 3 、 K 4 K_1、K_2、K_3、 K_4 K1、K2、K3、K4 以及 v x v_x vx 五个变量决定,把 v x v_x vx 输入进去,除以 0.01 0.01 0.01,做四舍五入,看和表的哪组 K 1 、 K 2 、 K 3 、 K 4 K_1、K_2、K_3、 K_4 K1、K2、K3、K4 对应,就把对应的 K 1 、 K 2 、 K 3 、 K 4 K_1、K_2、K_3、 K_4 K1、K2、K3、K4 输出出来,这就是离线 LQR 算法的基本原理。
离线 LQR 算法程序代码如下:
matlab
function k = fcn(k1,k2,k3,k4,vx)
if abs(vx)<0.01%特殊处理如果 v 的绝对值小于0.01,
k=[0,0,0,0];%直接令 k 就等于0,它是航向量
else
index=round(vx/0.01);%否则的话就用 v x 除001,再用round四舍五入,值就是所要的匹配的序号
k=[k1(index),k2(index),k3(index),k4(index)];
end
end 把 Q Q Q 设置成了单位矩阵, R R R 取 100 100 100,可以设置不同的 Q Q Q 和 R R R,算出 k k k 来,再把 k k k 导进去。所以 LQR 和规划算法一样,得先运行跑一遍,让工作区 Workspace 里有 K 1 、 K 2 、 K 3 、 K 4 K_1、K_2、K_3、 K_4 K1、K2、K3、K4,才能进行下一步的 Simulink 仿真。
LQR中的权重矩阵 Q Q Q 和 R R R 该怎么设置呢?
只要记住两句话即可:
- Q Q Q 越大,算法性能越好,但牺牲了稳定性
控制量 u u u 可能会特别大,比如可能算出来 u u u 要达到 720 720 720 度这样非常夸张的数值。 - R R R 越大,控制量越小,过程越平缓
过程比较平缓比较重要,因为要保证平缓、舒适性、安全性。
如果无人驾驶车的算法在疯狂打方向盘,看到也害怕,但是代价就是可能跟踪效果不是特别好,所以 Q Q Q 和 R R R 权重的权衡互相矛盾,要具体调合适的 Q Q Q 和 R R R ,期望达到的效果是能很快跟踪上路径,并且控制量 u u u 也不能变化过于剧烈。
模块写好之后,用 Simlink 拼起来即可。
5、前馈模块实现
前馈模块需要整车参数、 v x v_x vx 以及投影点的曲率 κ r \kappa_r κr。
forward_control
matlab
function forword_angle = fcn(vx,a,b,m,cf,cr,k,kr)
forword_angle=kr*(a+b-b*k(3)-(m*vx*vx/(a+b))*((b/cf)+(a/cr)*k(3)-(a/cr)));
end最后把所有结果整合起来即可。
last_angle
matlab
function angle = fcn(k,err,forword_angle)
angle=-k*err+forword_angle;
end 这样所有代码就都写完了,把它打个包封装成子系统,看起来整洁一点。

最后算出来前轮转角,再反馈给 Carsim 的前轮转角即可。
注意:单位换算弧度,要化成角度才能输入到 Carsim, Carsim 根据角度控制,不是根据弧度控制的。
6、避免代数环的延迟模块
在算出角度的线上再加延迟模块,作用是如果输入是这一时刻的值,输出是上时刻的值,它就等于延迟单元。这是为了避免代数环,即输入直接决定输出,输出又直接决定输入,会导致套娃式循环。所以为了打破循环就要加延迟模块来避免代数环。
需要整车状态 ( x , y , φ , v x , v y , φ ˙ ) (x,y,\varphi ,v_x,v_y,\dot{\varphi}) (x,y,φ,vx,vy,φ˙) 作为输入才能算出角度, x , y , φ x,y,\varphi x,y,φ 又需要角度作为输入打方向盘, x , y , φ x,y,\varphi x,y,φ 肯定也都变了,也就是说车辆状态决定角度,又决定车辆状态,他们之间就会变成套娃循环。所以说要加延迟模块,避免代数环现象。
7、仿真测试
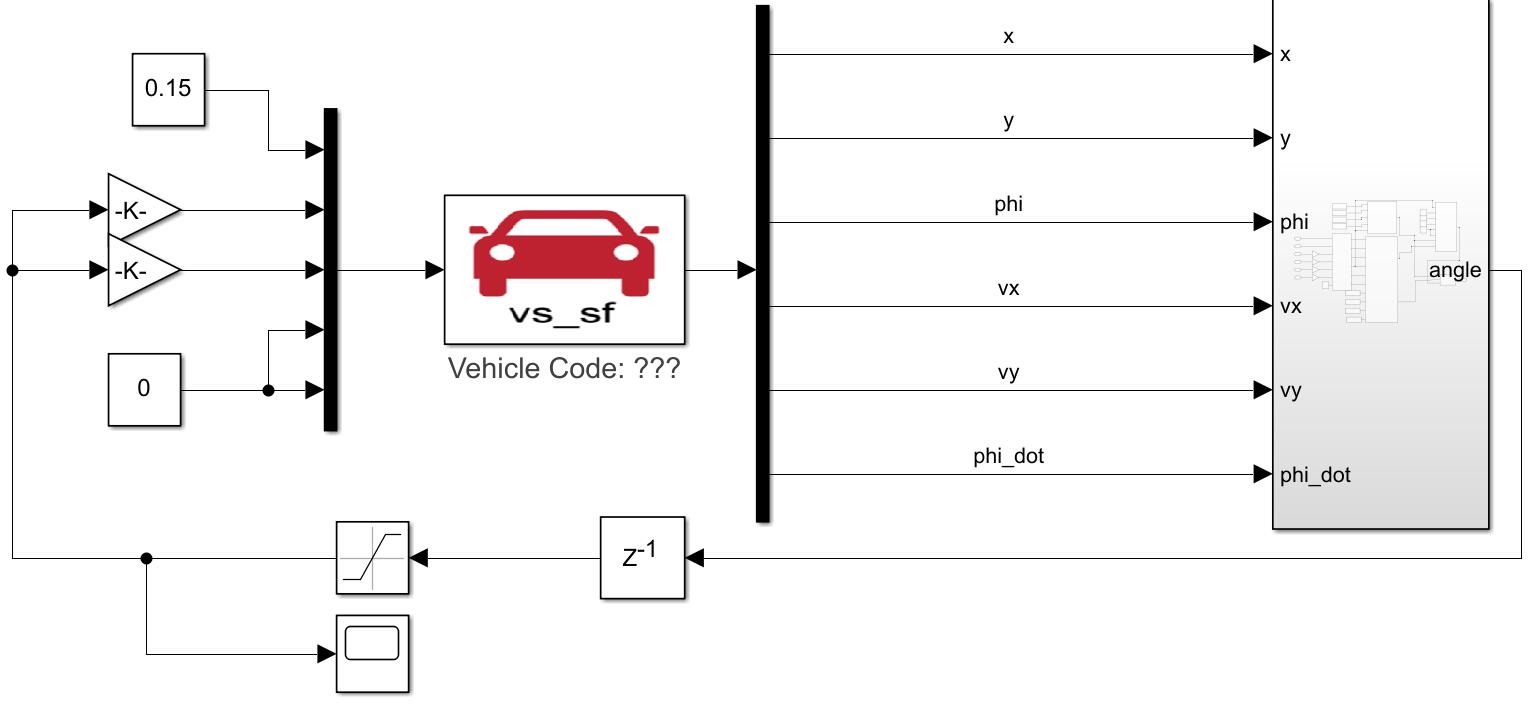
后轮转角给 0 0 0,节气门开度给 0.15 0.15 0.15,也就是给一点点油门,模型只做了横向控制,控制方向盘转角,并没有做纵向控制。纵向控制就是控制油门的节气门开度,后续再讲,所以说模型只搭了一半,在这里并不控制纵向速度,就给它恒定油门 0.15 0.15 0.15 ,运行程序看看效果,用 X Y XY XY 观测器,观察算法结果:
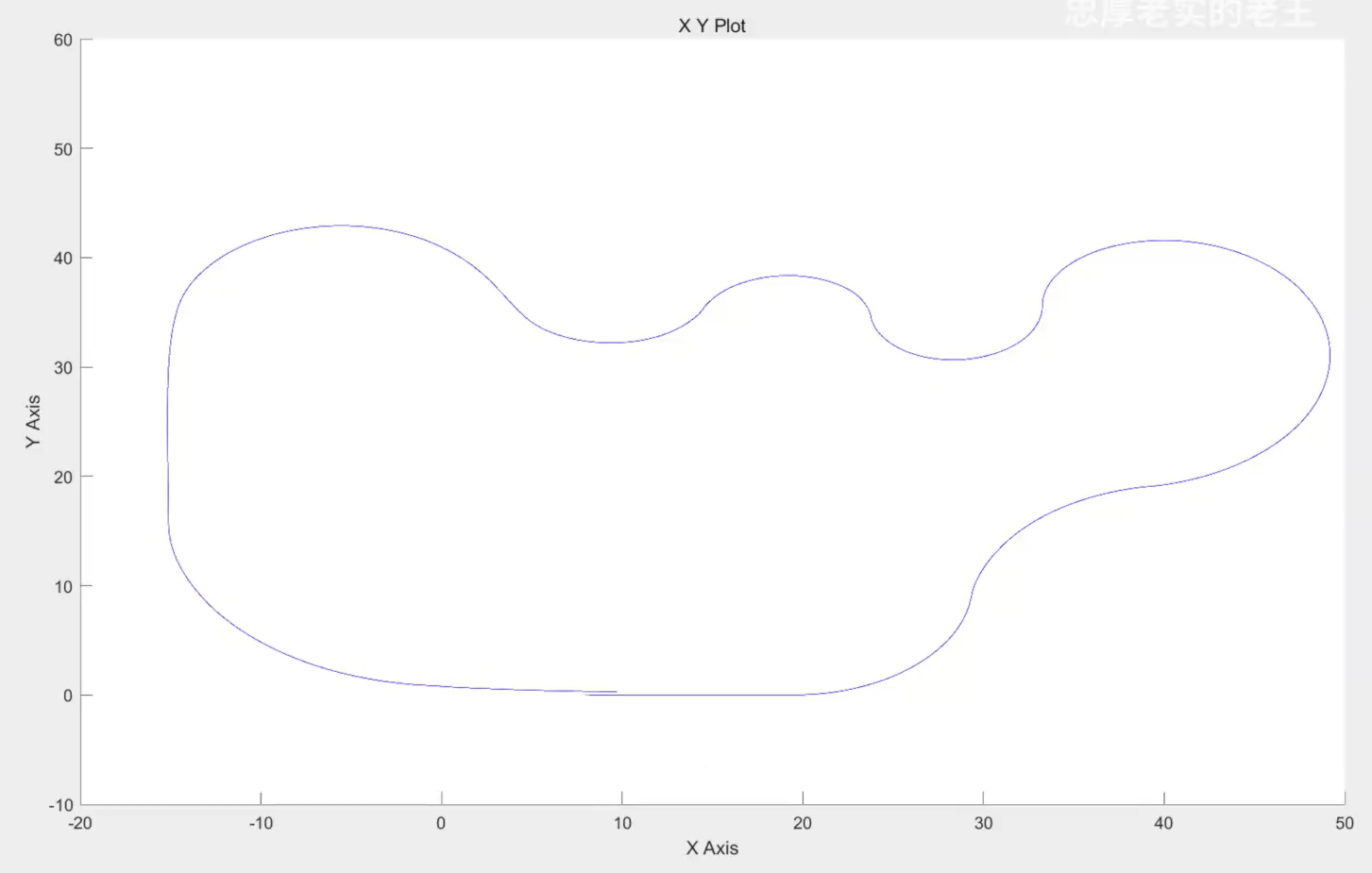
可能觉得是个椭圆而不是圆,这是因为横坐标和纵坐标间隔不完全一样,横坐标要宽一点,纵坐标窄一点,所以看起来不太像是圆,而像是椭圆,实际上应该是个圆。
其实很明显看到车转弯半径肯定超过 5 5 5 米,因为道路确实比较严苛。再跑一遍,看算出来方向盘转角是什么情况。
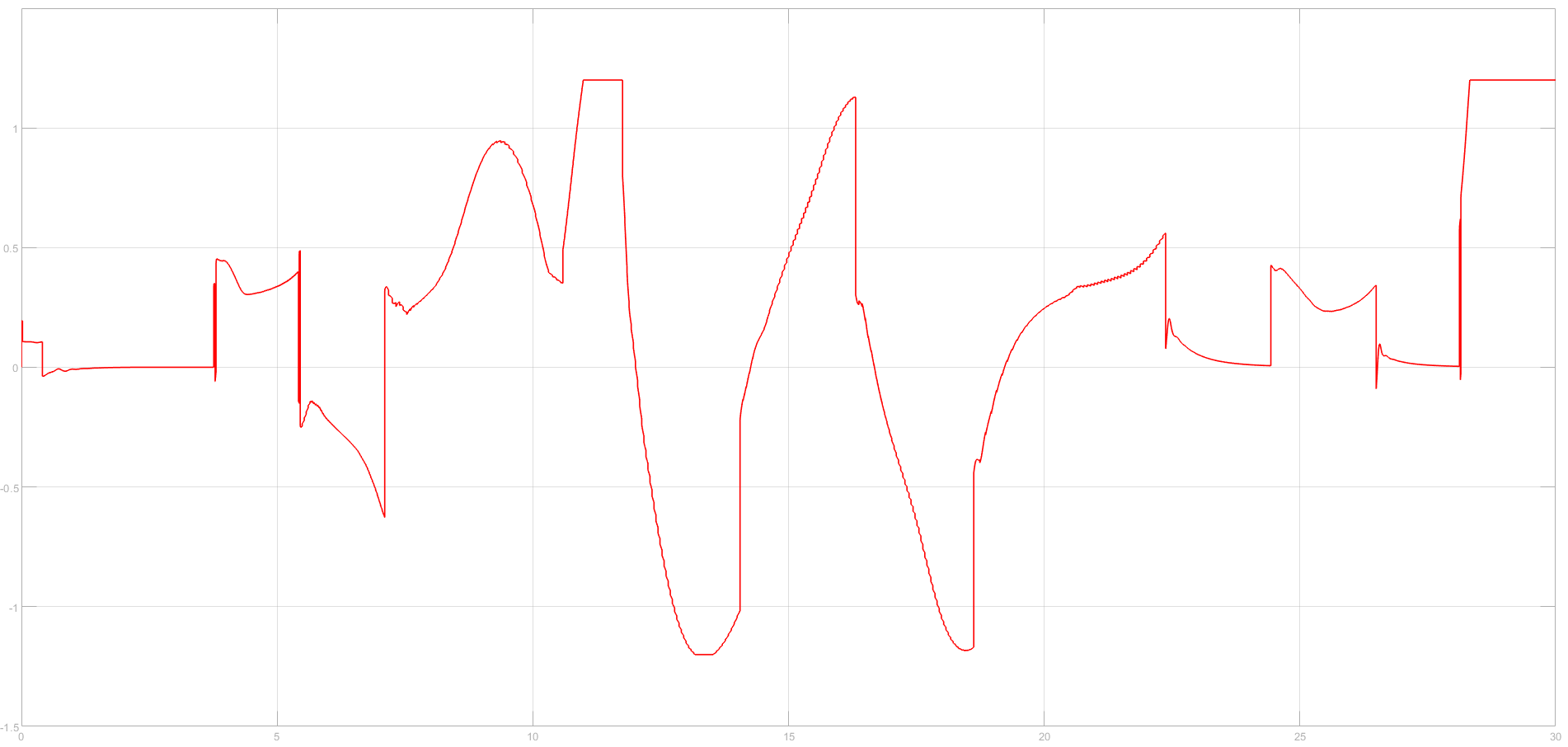
看一下算出来的前端转角,其实是不太好的,有的地方在不停鬼畜,不停地抖来抖去,其实不是一件好事情。
在有的地方突变太厉害,突然猛的打一下方向盘,在转弯时打得非常快。算法写出来有利有弊,方向盘打的太快了,而且方向盘在转弯时,不停的鬼畜抖来抖去,这是无法接受的。
但是也有好的地方,至少控制的跟踪效果做出来了,确实是按照所规划的轨迹在跑,而且规划的轨迹是比较严苛的。
转弯半径很小,而且有很多很急的弯,结果也算勉强能跟上,在没有做纵向控制且在不停加速的情况下,仍然勉强能跟上规划的轨迹,所以有一定的控制效果,但舒适性并不是特别好,方向盘在不停抖来抖去。
为什么会导致方向盘在鬼畜?而且在转弯时,方向盘会猛的突变?
这是有原因的,在下一节会讲算法性能不好的原因以及怎么改进。
五、总结
本节博客详细介绍了自动驾驶控制算法的建模过程,涵盖了从Carsim设置到模型搭建的各个方面。通过配置Carsim软件,获取整车参数并计算侧偏刚度,为后续的控制算法提供基础数据。
通过编写路径规划代码,生成所需的轨迹信息。在Matlab中,搭建了控制模型的各个模块,包括预测模块、误差和曲率计算模块、AB模块和LQR模块、前馈控制模块等。
最后,将模型整合并进行了仿真测试,展示了控制算法对规划轨迹的跟踪效果。
大家不妨在这一节照着思路把模型搭好,在下一节就会告诉各位怎么调模型,使其更平顺。欢迎关注后续内容!
参考资料
后记:
🌟 感谢您耐心阅读这篇关于 自动驾驶横向控制算法代码与模型 的技术博客。 📚
🎯 如果您觉得这篇博客对您有所帮助,请不要吝啬您的点赞和评论 📢
🌟您的支持是我继续创作的动力。同时,别忘了收藏本篇博客 ,以便日后随时查阅。🚀
🚗 让我们一起期待更多的技术分享,共同探索移动机器人 的无限可能!💡
🎭感谢您的支持与关注,让我们一起在知识的海洋中砥砺前行 🚀