本篇文章主要给出使用opencv sgbm重建三维点云的代码,鉴于自身水平所限,如有错误,欢迎批评指正。
环境:vs2015 ,opencv3.4.6,pcl1.8.0
原始数据使用D455采集,图像已做完立体校正,如下图所示(欢迎进Q群交流:874653199):
左图:
右图:
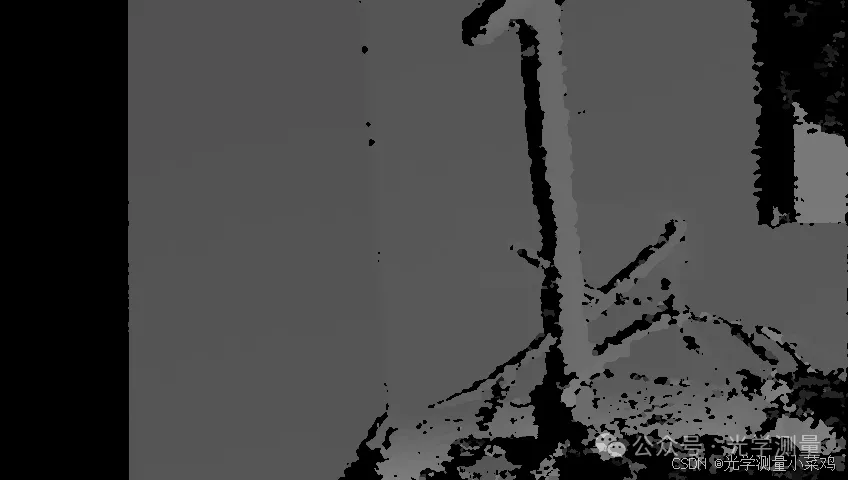
视差结果图:
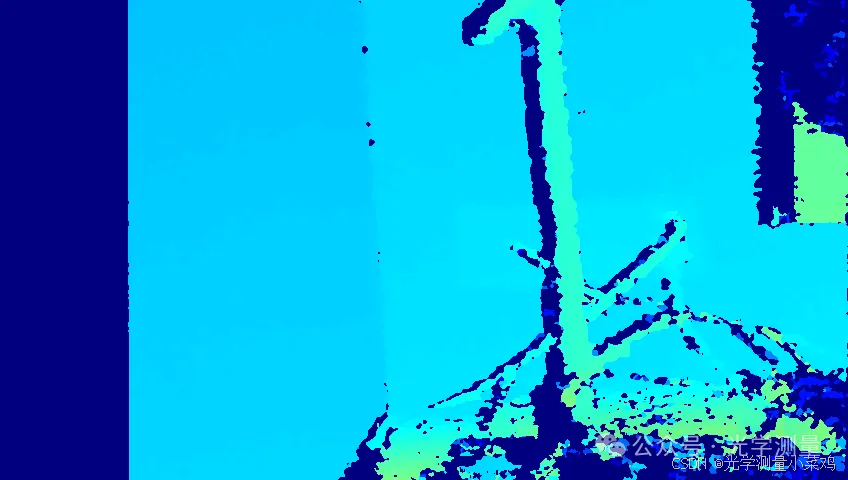
彩色视差结果图:
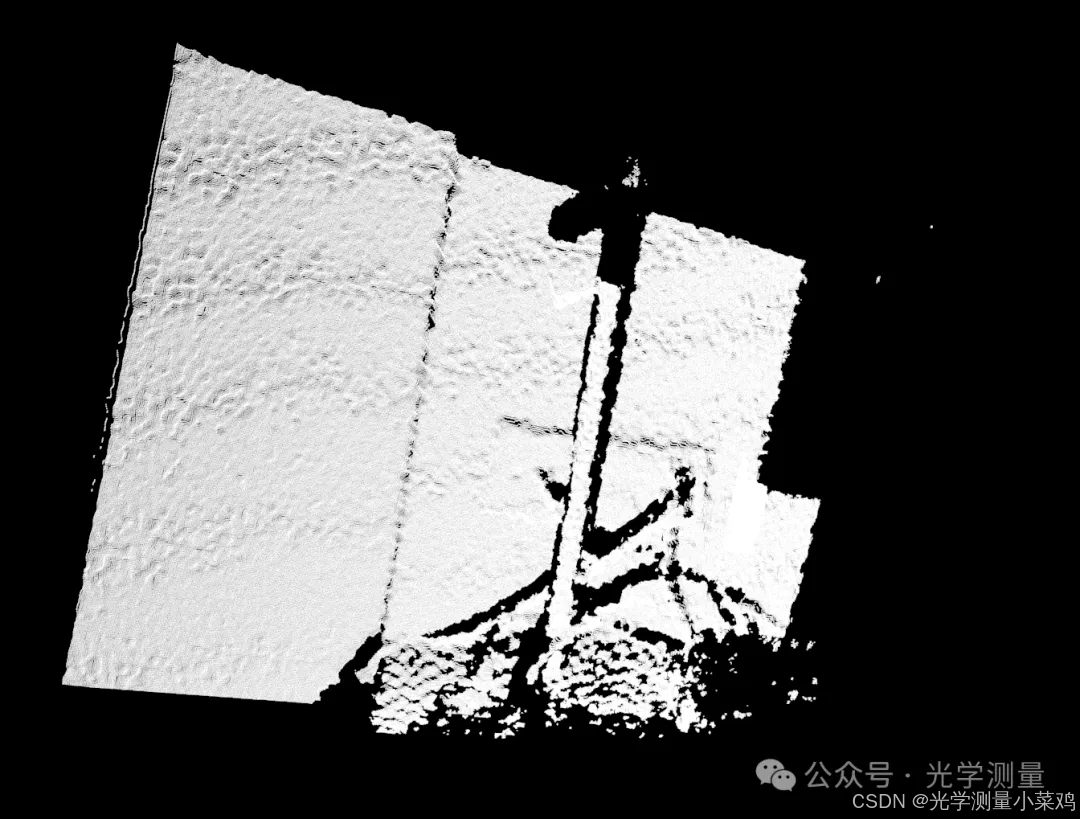
点云结果:
cpp
#include <iostream>
#include <fstream>
#include <opencv2/opencv.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include<pcl/io/ply_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#define isStereoRectify
void visualize(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud)
{
pcl::visualization::PCLVisualizer viewer("3D Viewer");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> src_h(cloud, 255, 255, 255);
viewer.setBackgroundColor(0, 0, 0);
viewer.addPointCloud(cloud, src_h, "cloud");
while (!viewer.wasStopped())
{
viewer.spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}
void recon3d(cv::Mat disparty, double f, double cx, double cy, double baseline) {
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>());
pcl::PointXYZ singlePoint;
for (int i = 0; i < disparty.rows; i++) {
for (int j = 0; j < disparty.cols; j++) {
const double disp = disparty.at<float>(i, j);
if (disp == 0) {
continue;
}
else {
singlePoint.z = f*baseline / disp;
singlePoint.x = (i - cx) / f *singlePoint.z;
singlePoint.y = (j - cy) / f *singlePoint.z;
if (singlePoint.z >= -0.65 && singlePoint.z <= 0.3) {
cloud->points.emplace_back(singlePoint);
}
}
}
}
visualize(cloud);
pcl::io::savePLYFileBinary("cloud.ply", *cloud);
}
int main(){
cv::Mat imageL = cv::imread("E:/2_光学测量/6_数据/6_stereo/l0.jpg",0);
cv::Mat imageR = cv::imread("E:/2_光学测量/6_数据/6_stereo/r0.jpg", 0);
cv::Mat cameraMatrixL = (cv::Mat_<double>(3, 3) << 428.406, 0.000000, 420.335, 0.000000, 428.406, 238.037, 0.000000, 0.000000, 1.000000);
cv::Mat distCoeffL = (cv::Mat_<double>(5, 1) << 0, 0, 0, 0, 0);
cv::Mat cameraMatrixR = (cv::Mat_<double>(3, 3) << 428.406, 0.000000, 420.335, 0.000000, 428.406, 238.037, 0.000000, 0.000000, 1.000000);
cv::Mat distCoeffR = (cv::Mat_<double>(5, 1) << 0, 0, 0, 0, 0);
cv::Mat R = (cv::Mat_<double>(3, 3) << 1, 0, 0, 0, 1, 0, 0, 0, 1);
cv::Mat T = (cv::Mat_<double>(3, 1) << -0.0949472, 0, 0);
#ifdef isStereoRectify
cv::Mat Rl, Rr, Pl, Pr, Q;
cv::Rect validROIL, validROIR;
cv::Size imageSize = imageL.size();
cv::stereoRectify(cameraMatrixL, distCoeffL, cameraMatrixR, distCoeffR, imageSize, R, T, Rl, Rr, Pl, Pr, Q, cv::CALIB_ZERO_DISPARITY,
0, imageSize, &validROIL, &validROIR);
cv::Mat mapLx, mapLy, mapRx, mapRy;
cv::initUndistortRectifyMap(cameraMatrixL, distCoeffL, Rl, Pl, imageSize, CV_32FC1, mapLx, mapLy);
cv::initUndistortRectifyMap(cameraMatrixR, distCoeffR, Rr, Pr, imageSize, CV_32FC1, mapRx, mapRy);
cv::Mat rectifyImageL, rectifyImageR;
cv::remap(imageL, rectifyImageL, mapLx, mapLy, cv::INTER_LINEAR);
cv::remap(imageR, rectifyImageR, mapRx, mapRy, cv::INTER_LINEAR);
imageL = rectifyImageL;
imageR = rectifyImageR;
#endif // stero
cv::namedWindow("disparity", CV_WINDOW_NORMAL);
int SADWindowSize =5, numberOfDisparities = 128;
cv::Ptr<cv::StereoSGBM> sgbm = cv::StereoSGBM::create(0, numberOfDisparities, SADWindowSize);
sgbm->setPreFilterCap(64);
sgbm->setBlockSize(SADWindowSize);
sgbm->setP1(8 * SADWindowSize* SADWindowSize);
sgbm->setP2(64 * SADWindowSize* SADWindowSize);
sgbm->setMinDisparity(0);
sgbm->setNumDisparities(numberOfDisparities);
sgbm->setUniquenessRatio(10);
sgbm->setSpeckleWindowSize(200);
sgbm->setSpeckleRange(64);
sgbm->setDisp12MaxDiff(1);
sgbm->setMode(cv::StereoSGBM::MODE_SGBM);
cv::Mat disp, disp8, dispf;
sgbm->compute(imageL, imageR, disp);
disp.convertTo(disp, CV_32F, 1.0 / 16.0);//1.0/16.0
disp.convertTo(disp8, CV_8U, 1.0);
imshow("disparity", disp8);
cv::imwrite("disp_mono.png", disp8);
cv::Mat disp8_color;
cv::applyColorMap(disp8, disp8_color, cv::COLORMAP_JET);
imshow("disparity_color", disp8_color);
cv::imwrite("disp_color.png", disp8_color);
recon3d(disp, cameraMatrixL.at<double>(0,0), cameraMatrixL.at<double>(0, 2), cameraMatrixL.at<double>(1, 2), T.at<double>(0));
cv::waitKey(0);
return 0;
}