一:进一步学习了
今天学习下VisionMaster中的卡尺工具:主要用于测量物体的宽度、边缘的特征的位置以及图像中边缘对的位置和间距
二:开始学习
1:什么是卡尺工具?
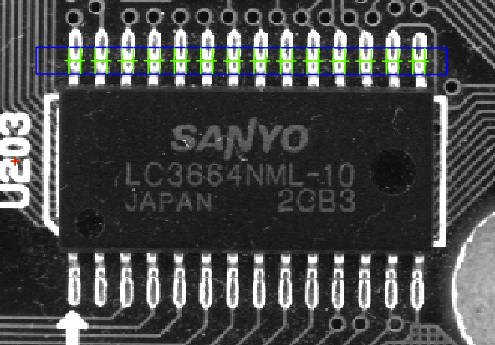
如果我需要检测芯片的每一个PIN的宽度和坐标,如果用边缘直线或者边缘点的话,那得一个一个画,实在是太不方便了,那现在用一个卡尺工具就可以一次性测量出来,那是不是很方便
2:应用场景:这个应用场景其实在机器视觉的场景下应用还是非常广泛的
线线测量:如测量手机Cover Glass上白色区域的宽度或麦克风条形孔的间距。通过两个直线查找模块分别定位上下边缘,再计算两线平均距离
三:直接上案例
1:先导入需要测试的图片集合
2:使用轮廓定位,把两个组件的线连起来,这里是需要设定模版匹配功能,这样图像不管怎么旋转都能准确定位图像位置,具体操作步骤可以参考前面课程
3:拖入位置修正功能:这个非常重要,这里也不提了,可以参考上一篇笔记
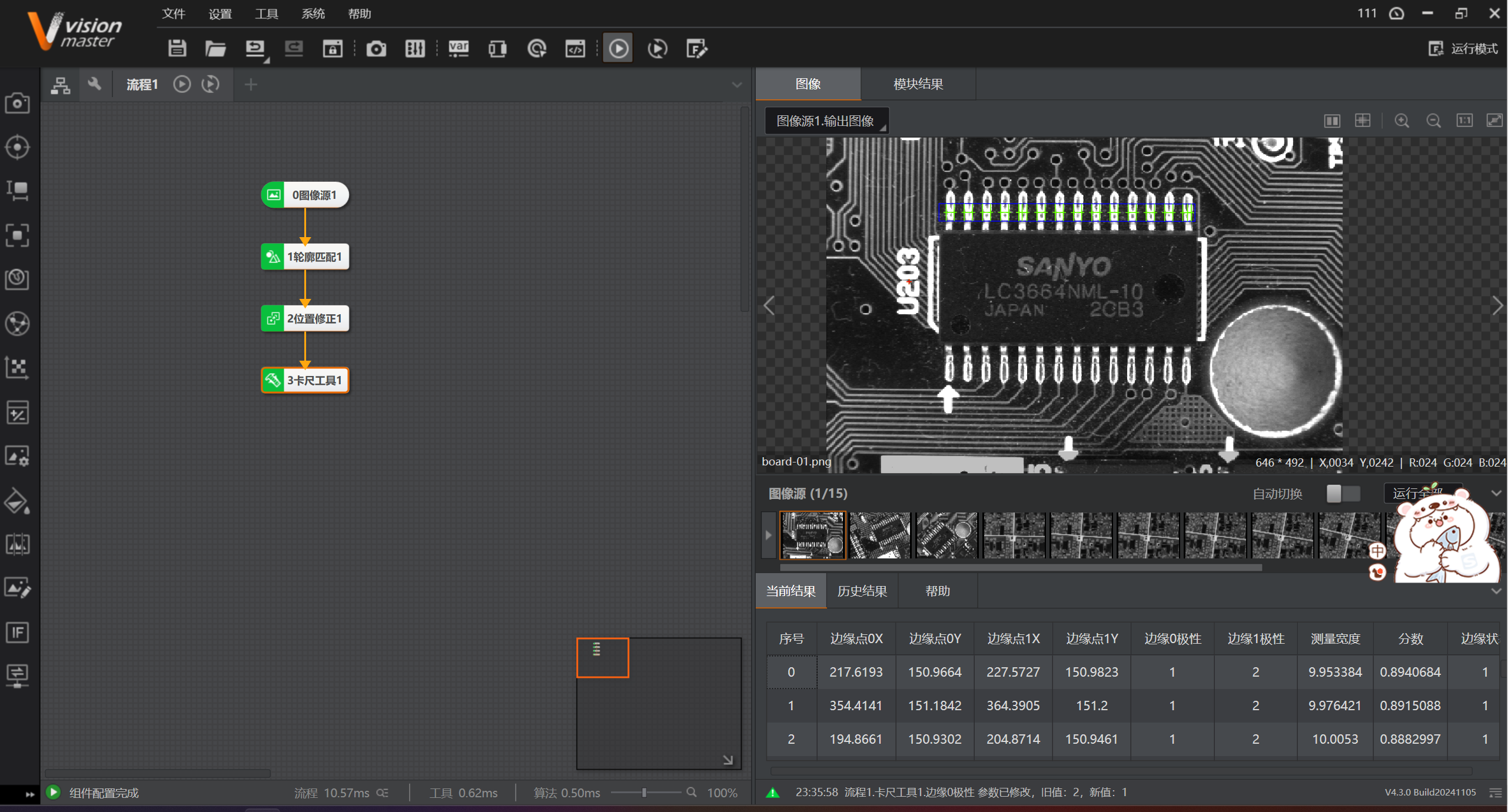
4:拖入卡尺工具模块

5:双击组件,开始设定参数:
基本参数这里就是画ROI,设定跟踪参数和之前的工具是一样的方法

运行参数:核心参数,开始设定

(1):边缘模式:
单边缘:检测指定区域内的边缘位置,可用于定位、计数和判断有无等。
边缘对:检测指定区域内的边缘间距 。应用为在工件尺寸测量场景中获取特定边缘对间的距离。
(2):滤波尺寸:用于增强边缘和抑制噪声,最小值为1。当边缘模糊或有噪声干扰时,增大该值有利于使检测结果更加稳定。但如果边缘与边缘之间挨得太近,则这个参数不适宜过大
(3):边缘阈值:边缘梯度,只有实际的边缘梯度数值大于这个设定值,才会有效检测到边缘
(4):边缘0/1极性: 从黑到白:就是梯度变化是黑色像素向白色像素过渡的边缘点
从白到黑:就是梯度变化是白色像素向黑色像素过渡的边缘点
任意:只要有梯度变化并且满足条件的点
(5):边缘对宽度:边缘模式设置为边缘对时,该参数才出现,期望输出的边缘对的像素间距尺寸。单独调节该参数无法直接筛选出期望的边缘对,仅当位置归一化计分、相对位置归一化计分、间距计分、间距差计分、相对间距差计分中一个或多个计分方式开启时调节该参数有意义
(6):最大结果数:期望输出的边缘对最大数量,比如上图中需要计算16个引脚的宽度,这里就可以设定16
(7):排序方式:设置最终输出的边缘点在当前结果页签的显示排序,分为分数升序、分数降序、方向正向、方向逆向四种类型
(8):下面的其他参数结合官方说明去研究吧,其实实际在项目中的应用不大,只需要应用该模块输出边缘位置信息即可
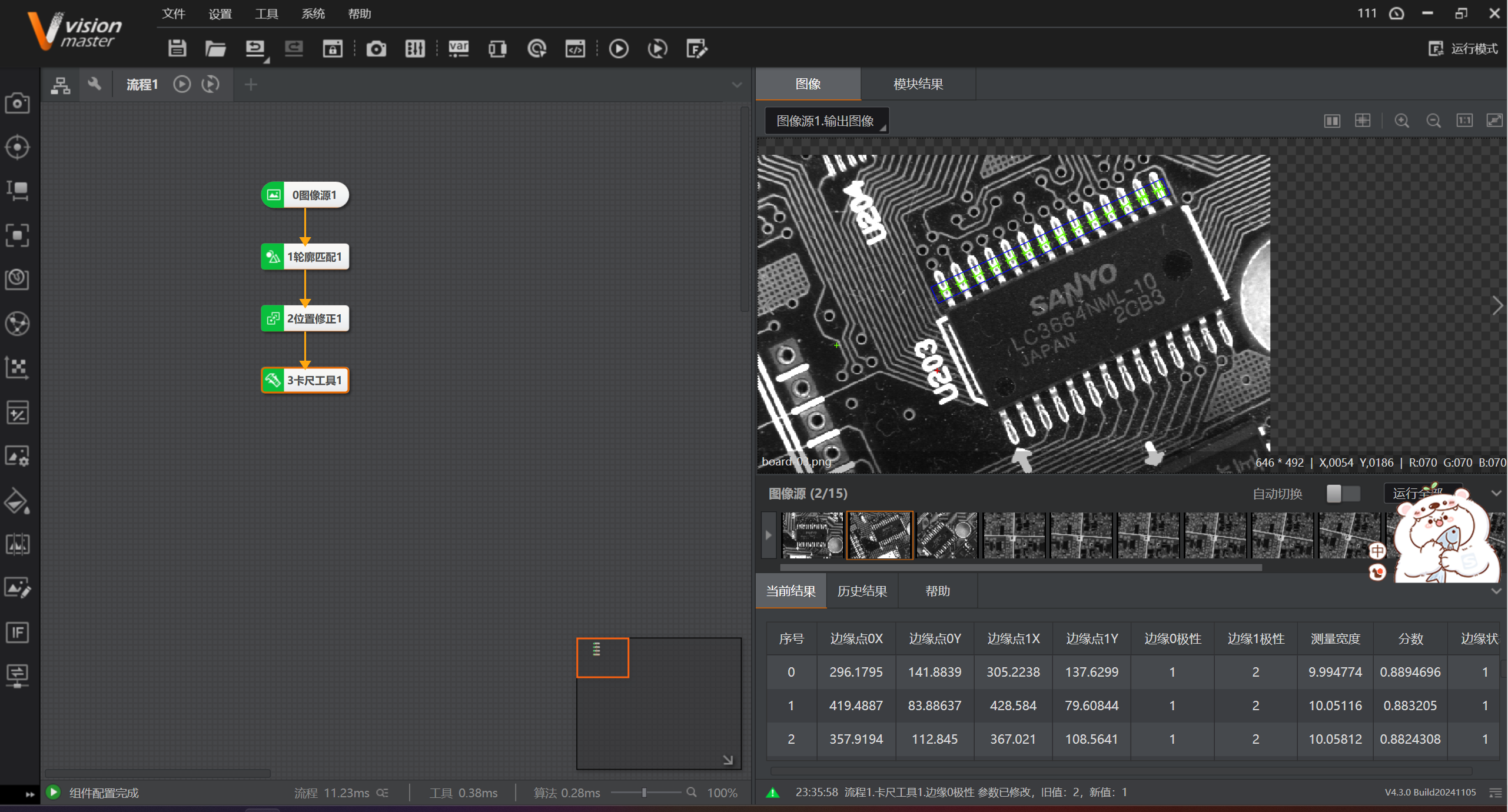
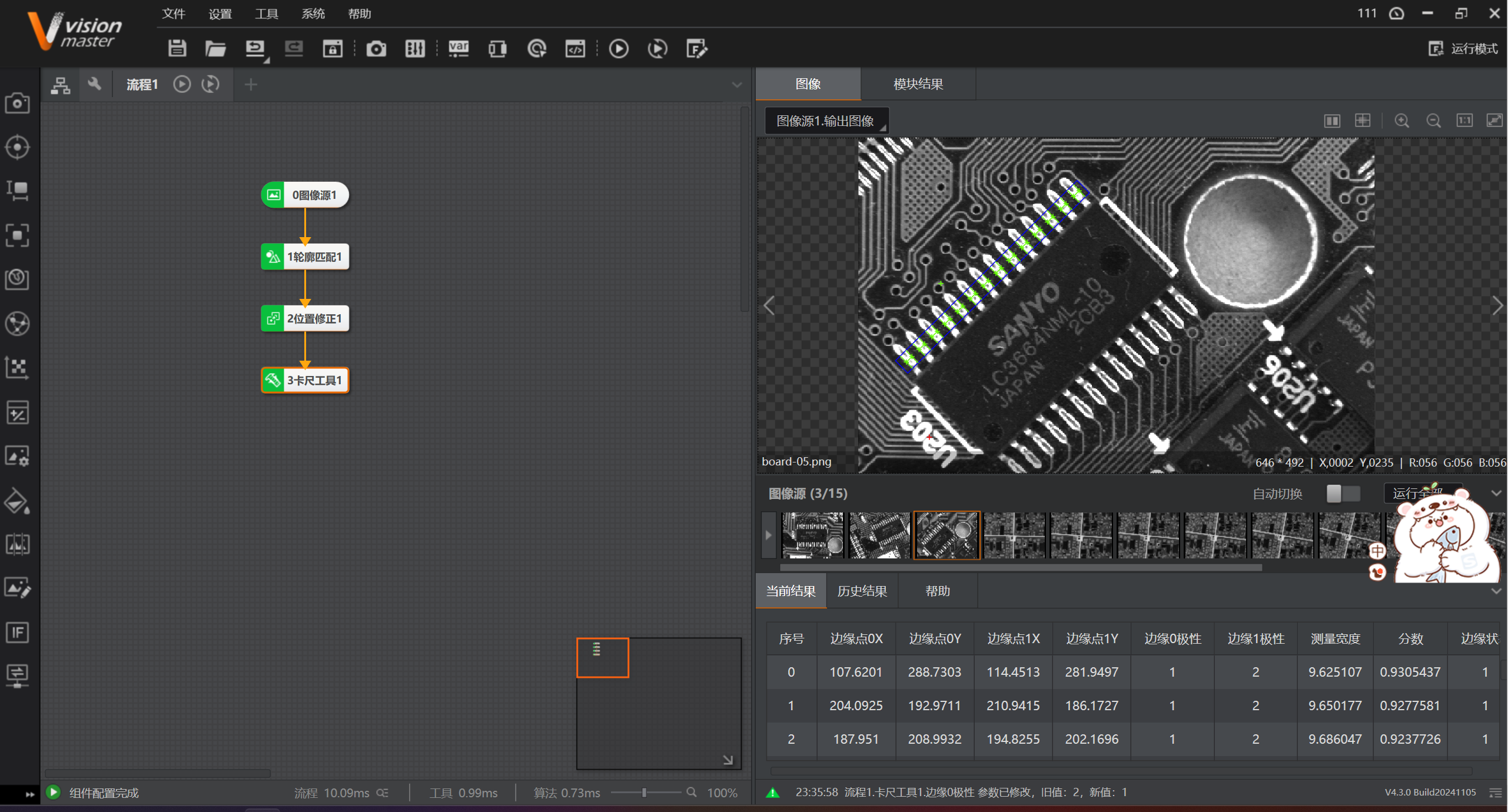
四:实测:上述设定好参数,开始实际测量看看效果,不同的检测模式下的检测效果