目录
[2.1 应用场景](#2.1 应用场景)
[2.2 实现流程](#2.2 实现流程)
[2.3 效果展示](#2.3 效果展示)
[2.4 精度验证](#2.4 精度验证)
[2.5 实物裂缝尺寸以及深度测量效果展示](#2.5 实物裂缝尺寸以及深度测量效果展示)
一,相机参数规格

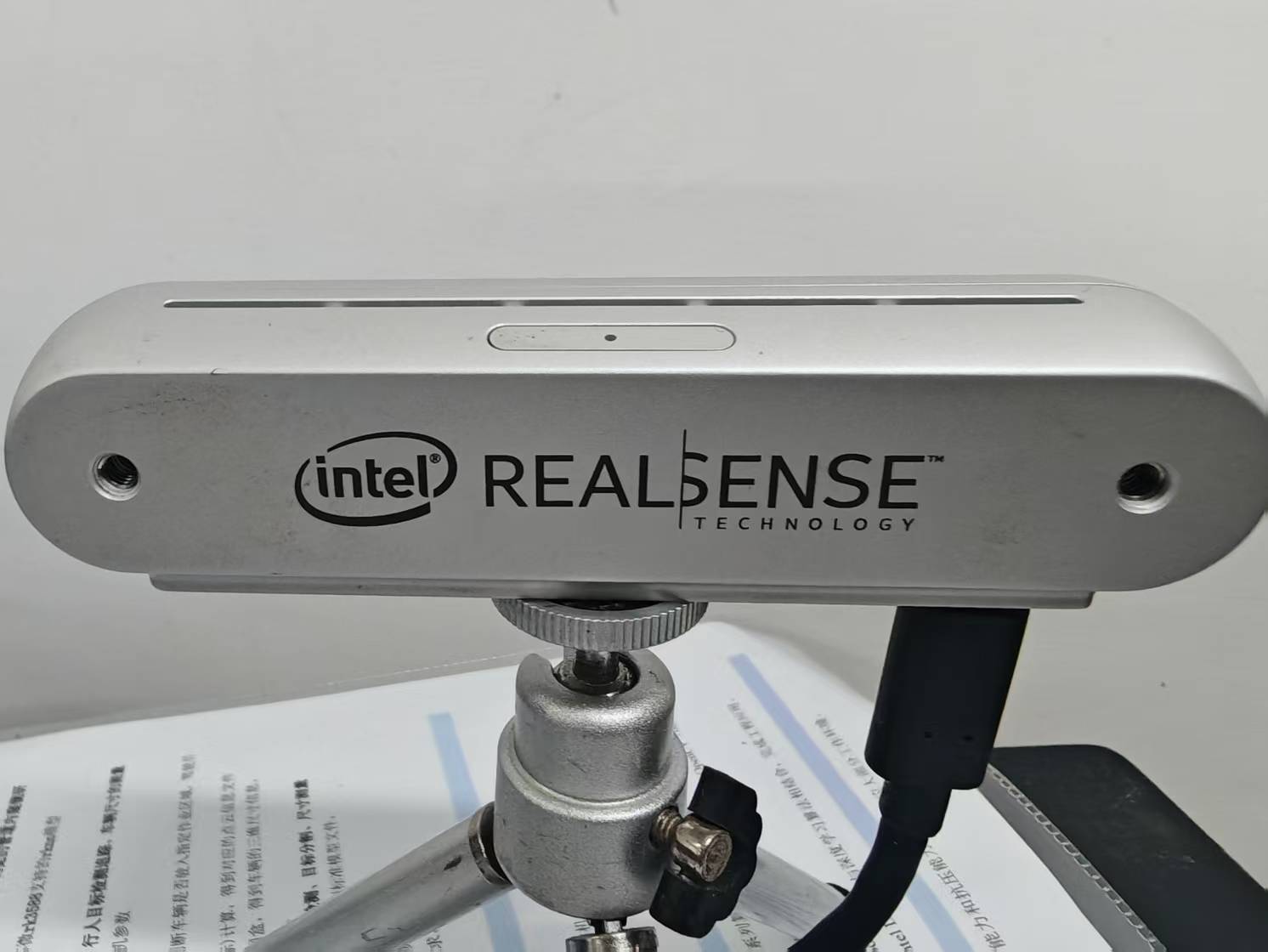
英特尔 RealSense D455 是英特尔 RealSense D400 系列的第四款产品,它是一款深度相机,采用结构光技术来实现深度感知。
- 结构光技术 :结构光技术的基本原理是通过投射特定的光图案到物体上,然后分析图案的变形来计算物体的深度信息。D455 使用这种技术,通过其内置的投影仪投射红外光图案,并使用两个红外摄像头捕捉这些图案的变形,从而精确地计算出物体的深度。
-
深度感知性能提升 :与 D415/D435 摄像头相比,D455 的感知范围和精度都提高了两倍。其将两个深度传感器之间的距离延长至 95 毫米,从而将深度误差降低至 4 米时的不到 2%,可实现更精确的深度测量。
-
RGB 图像质量优化 :RGB 传感器采用全局快门,并且其视场与深度视场相匹配,能够提供更出色的 RGB 图像质量,以及深度图像和 RGB 图像之间的更好对应性,从而可提高扫描质量。
-
集成 IMU :集成了惯性测量单元(IMU),可在摄像头移动的情况下,让应用更精准地感知深度,增强机器人和无人机等设备的环境感知能力。
-
自我校准功能 :通过简单的平移和旋转运动,几秒钟内就能完成自我校准,无需特制校准靶,也无需复杂操作,降低了开发者的使用难度和维护成本。
-
支持多相机设置 :无论是室内还是室外,多个 D455 摄像头都可以协同工作,其长距离范围支持在高达 90fps 的帧率下进行实时场景捕捉。
二,结合YOLO实例分割实现裂缝尺寸以及深度测量
2.1 应用场景
-
零部件裂缝检测 :在工业生产中,一些金属或塑料零部件在加工或使用过程中可能会产生裂缝,影响产品质量和安全性。D455 相机可用于对这些零部件进行高精度的表面检测,快速准确地测量裂缝的尺寸和深度,实现自动化的质量控制和缺陷筛查,提高生产效率和产品质量。
-
焊缝检测 :在焊接行业中,焊缝的质量至关重要。D455 相机能够对焊缝表面进行细致扫描,测量焊缝的宽度、深度以及焊缝表面的不规则程度等参数,帮助检测焊缝是否存在缺陷,如未焊透、焊瘤等,为焊接质量的评估和改进提供数据支持
2.2 实现流程
参考我之前的博客:
YOLOv8实例分割+双目相机实现物体尺寸测量_yolov8实例分割的框架-CSDN博客
2.3 效果展示
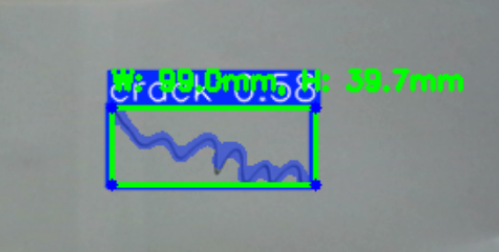
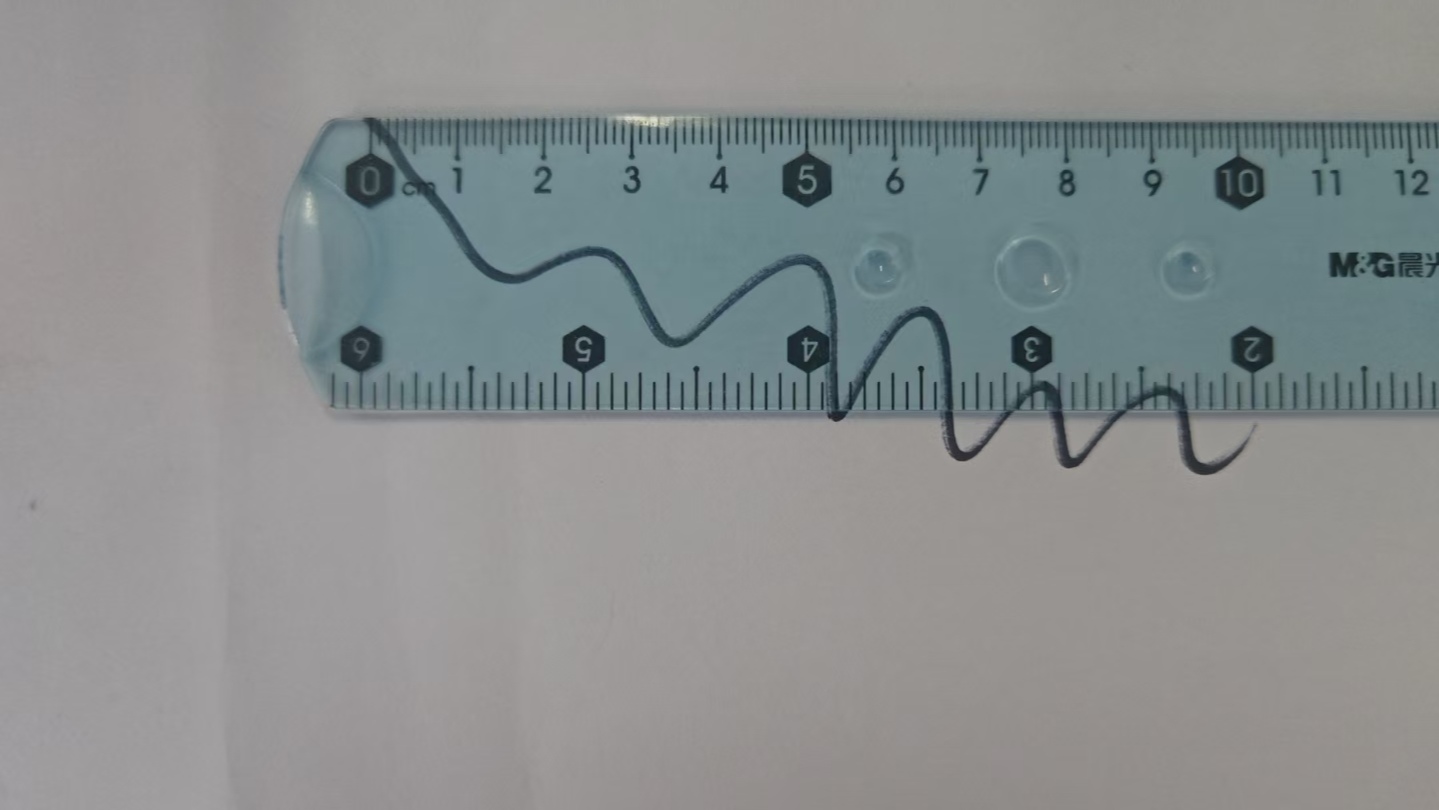
2.4 精度验证
可以看出宽度和高度都是十分准确的
可以改进的地方:
- 裂缝数据集的标注方式
- 实例分割模型对裂缝目标的针对性设计
W:
H:
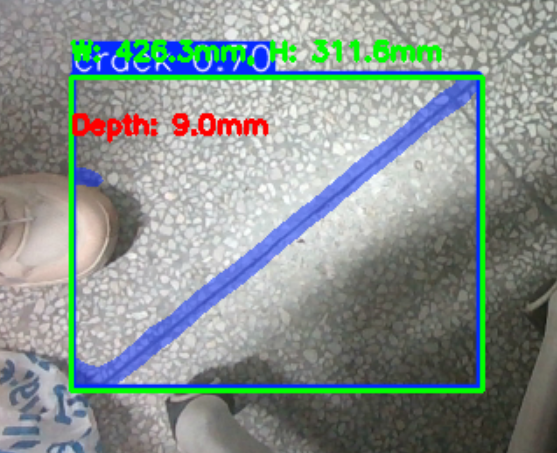
2.5 实物裂缝尺寸以及深度测量效果展示
W:裂缝宽度
H:裂缝高度
Depth:裂缝最深处距离平面距离