I2C总线是Philips公司在八十年代初推出的一种串行、半双工的总线,主要用于近距离、低速的芯片之间的通信。本篇文章首先从理论讲起,介绍了英飞凌TC3x系列芯片对应MCAL中对I2C驱动的定义与介绍,建议读者在阅读本篇文章之前对I2C有个简单的认识,协议本身比较简单,笔者就不在文章中赘述了。文章后边主要介绍了I2c的EB配置,如果是异步则需要配置中断和回调函数。文章的最后还是老样子给读者介绍了I2C驱动的调试代码和测试结果,因为本系列是基于KIT_A2G_TC397XA_TFT开发板做的调试,所以就直接使用了开发板上接的MCP79411芯片来验证I2C是否调通。PS:关于MCP79411芯片的一些I2C参数要求都源自其芯片手册,文中就不截相关的图了。
目录
[EB tresos配置](#EB tresos配置)
概述
MCAL实现的I2c驱动程序负责初始化I2c硬件模块。它还提供将数据写入从机并从从机读取数据的服务,实现方式支持同步(数据传输不会发生中断调用)和异步(数据将通过中断调用传输)的读写操作模式。MCAL实现的I2c驱动程序不支持从机模式。
该驱动程序支持:
- 主机模式
- 标准模式数据传输速率高达100k bit/s(20k bit/s~100k bit/s)
- 快速模式数据传输速率高达400k bit/s(100k bit/s~400k bit/s)
- 7位I2c总线寻址
模块软硬件接口如下图所示。
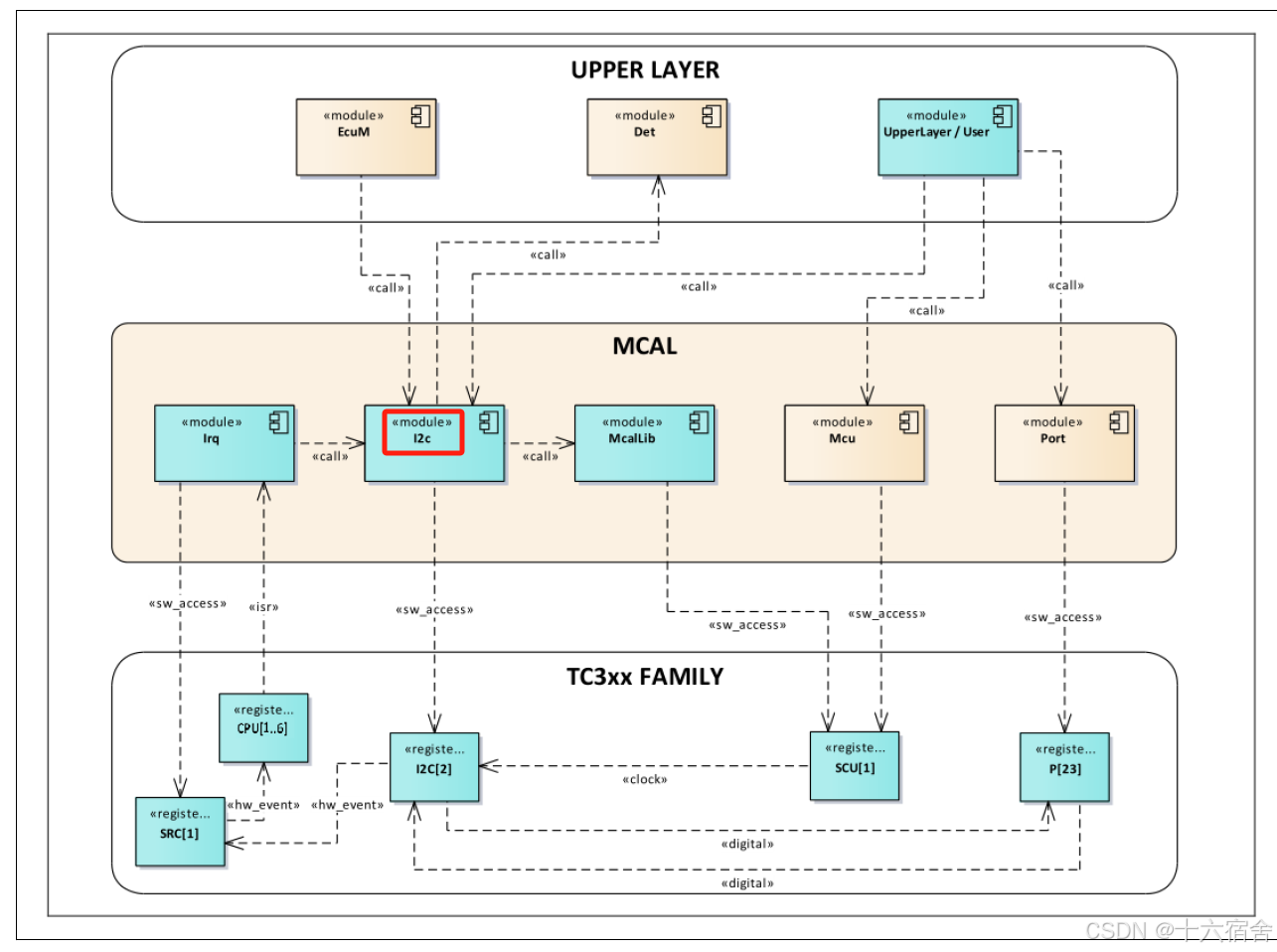
依赖模块
I2C
12C驱动程序使用的I2C硬件单元的关键特性有:
- 主机模式
- 标准模式数据传输速率高达100k bit/s(20k bit/s~100k bit/s)
- 快速模式数据传输速率高达400k bit/s(100k bit/s~400k bit/s)
- 7位I2c总线寻址
- I2C时钟的预分频器(从0到255)
- 通过分数除法器生成比特率
驱动使用的硬件事件包括(涉及的大写标志位相关寄存的位域名称):
- 发送/接收完成时的TX_END标志。
- 从发送模式切换到接收模式时的RX标志。
- LSREQ_INT,SREQ_INT,LBREQ_INT,BREQ_INT标志,用于用确定的数据数填充FIFO。
- 传输和接收过程中出现错误时的错误标志。
SCU
kernel_clk由来自fl2C的MCU驱动程序设置。内核时钟对于保持l2C协议指定的比特率是必需的。
interface_clk直接连接到fSPB。interface_clk需要驱动FIFO、SFR和服务请求块。
SCU模块为所有外围设备提供时钟。MCU驱动程序负责时钟树的配置。
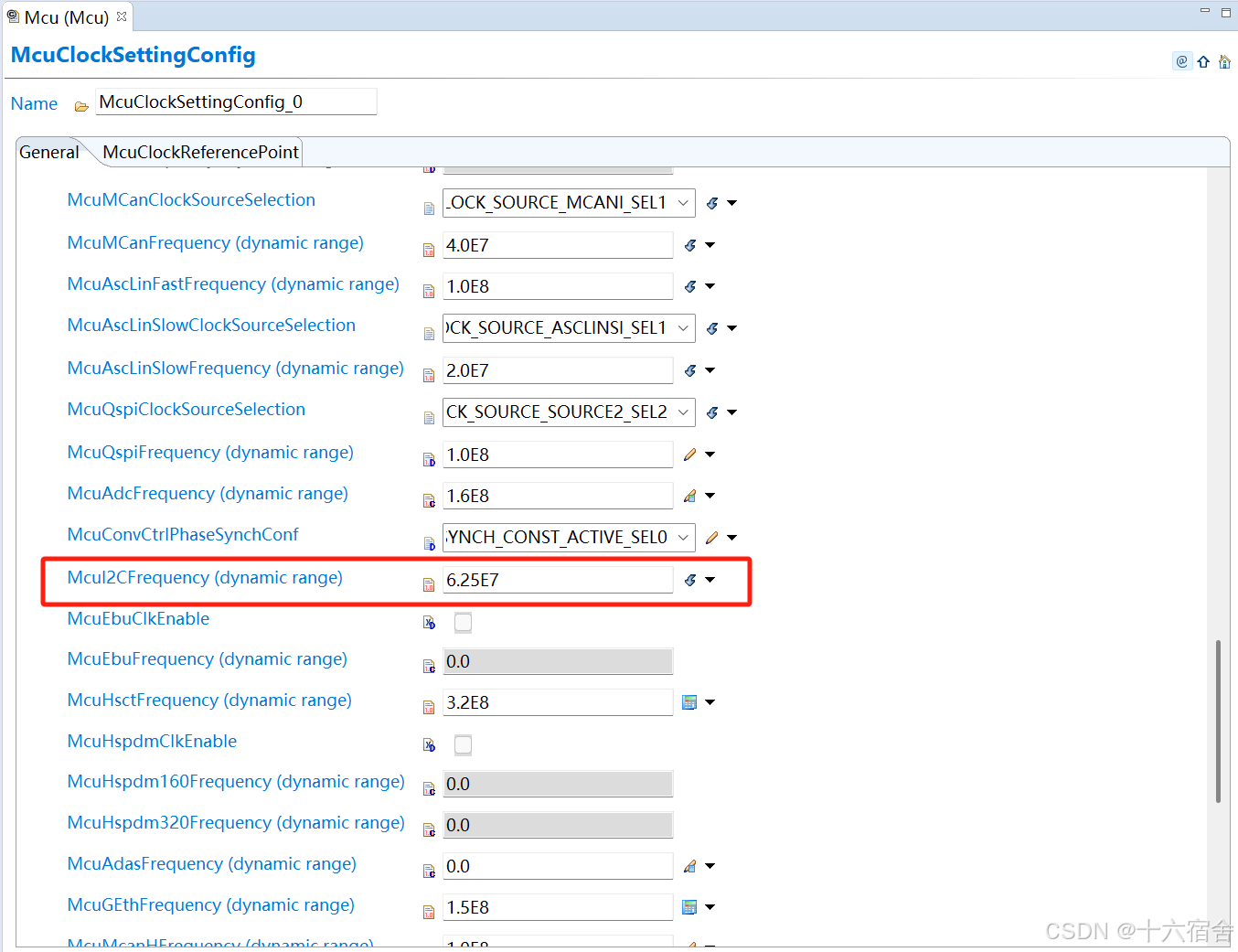
I2C驱动程序依赖于MCU驱动程序进行时钟生成。fI2C定义了I2C核心的应用时钟频率。从PLL2(200MHZ)导出的fI2C独立于fSPB,允许I2C以恒定的波特率(频率)运行。此配置可以使用Tresos中MCU模块中的Mcul2Cfrequency完成。频率需要在MCU模块配置参数McuClockRefSelection中简历对应引用,而McuClockRefSelection最终由Tresos中的I2C配置引用。
Port
I2C外围设备的SCL、SDA引脚的方向和模式选择由Port驱动器配置。PORT驱动程序配置整个微控制器的端口引脚。用户必须在调用I2C初始化之前通过PORT配置引脚,并初始化端口引脚。
I2C驱动程序需要配置两个引脚,SCL和SDA。SCL代表时钟,SDA代表数据。由于I2C协议允许多主,因此需要将SDA配置为开漏以实现线与逻辑。
SRC
I2C可以在多种事件发生时触发中断,每种I2C模块的中断情况都不同。对于这些中断,I2C驱动程序依赖于中断路由器进行中断传递。中断路由器的任何功能块都不由I2C驱动程序管理。中断路由器完全由IRQ驱动程序管理。中断优先级和服务类型(TOS)在IRQ 驱动程序中集中配置,从而避免了资源冲突。I2C模块有三个中断线:
- Protocol Interrupt:这个中断源有七种,分别是:发送结束、接收模式、仲裁丢失、没有ACK、地址匹配、通用调用和主码构成。服务请求线SRC_I2C0P被用作协议中断。MCAL提供的中断处理函数为I2c_IsrI2cProtocol,用作在读取且地址已经发出的情况下,进行包括I2C_NO_ACK、I2C_ARBITRATION_LOST等协议状态获取,并回调对应通道的通知函数。
- Error Interrupt:这个中断有四个来源。这个中断是由传输溢出、传输下溢、接收下溢。服务请求线SRC_I2C0ERR用于错误中断。用户必须确保在发生错误中断时调用12c驱动程序提供的错误中断服务例程。MCAL提供的错误中断实现函数为I2c_IsrI2cError。
- Data transfer Interrupt:这个中断有四个来源。这个中断由任何类型突发请求、上次突发请求、单次请求、上次单次请求生成。服务请求线SRC_I2C0DTR用于数据传输中断。MCAL提供的中断处理函数为I2c_IsrI2cDtr,它负责处理I2C数据的连续写入和读取。
环境与目标
本文使用的为英飞凌提供的开发板KIT_A2G_TC397XA_TFT,使用X102上排针的P15.4和P15.5作为I2C使用引脚。
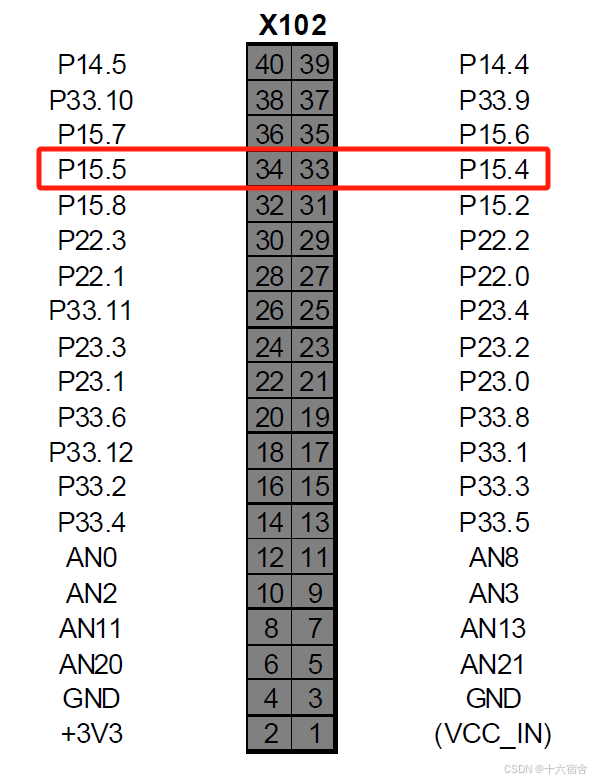
在TC397 KIT开发板上,P15.4和P15.5,不仅从X102引出,还连接到了RTC MCP79411。
涉及的软件如下:
- EB-tresos :用于生成动态代码,具体工程搭建参考《【AUTOSAR MCAL】MCAL基础与EB tresos工程新建》。
- HighTech :用于编译生成elf文件,具体的工程搭建参考《【MCAL】HighTec集成TC3xx对应MCAL的Demo》。
- UDE 5.2:用于下载和调试程序。
涉及的参考文档如下表。
|----|-------------------------------------------------------|--------------------------------|
| 序号 | 参考资料 | 内容 |
| 1 | 《Infineon-AURIX_TC39x-UserManual-v02_00-EN》 | 英飞凌TC39x用户手册 |
| 2 | 《Infineon-AURIX_TC3xx_Part1-UserManual-v02_00-EN.pdf》 | 英飞凌TC3xx用户手册 |
| 3 | 《Infineon-AURIX_TC3xx_Part2-UserManual-v02_00-EN.pdf》 | 英飞凌TC3xx用户手册 |
| 4 | 《Infineon-TC39x-DataSheet-v01_00-EN》 | 英飞凌TC39x数据手册 |
| 5 | 《ApplicationKitManual-TC3X7-ADAS-V21.pdf》 | 开发板KIT_A2G_TC397XA_TFT说明 |
| 6 | 《MC-ISAR_TC3xx_UM_I2c.pdf》 | 英飞凌提供的TC3xx芯片I2C用户手册 |
| 7 | 《DS22266A_CN》 | MCP79410/MCP79411/MCP79412芯片手册 |
配置目标如下:
- 通过I2C同步/异步读取MCP79411芯片中6字节长度的ID值。
EB tresos配置
MCU
配置fI2C的频率。
Port
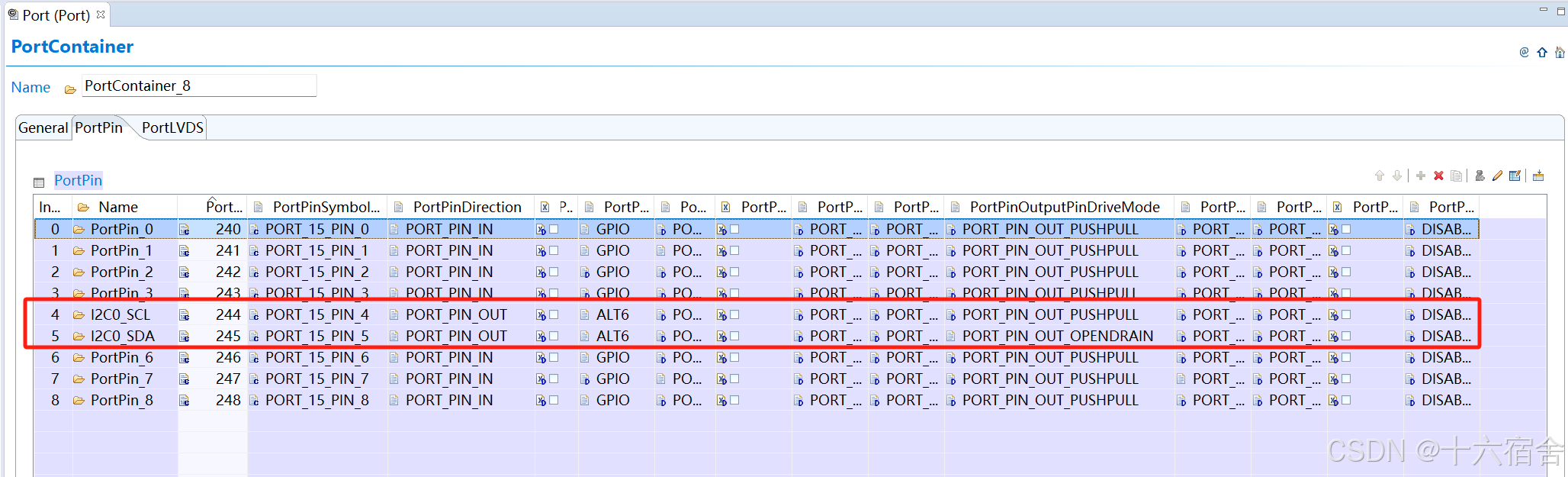
上图是Port口的配置信息,根据的是下图芯片DataSheet信息。
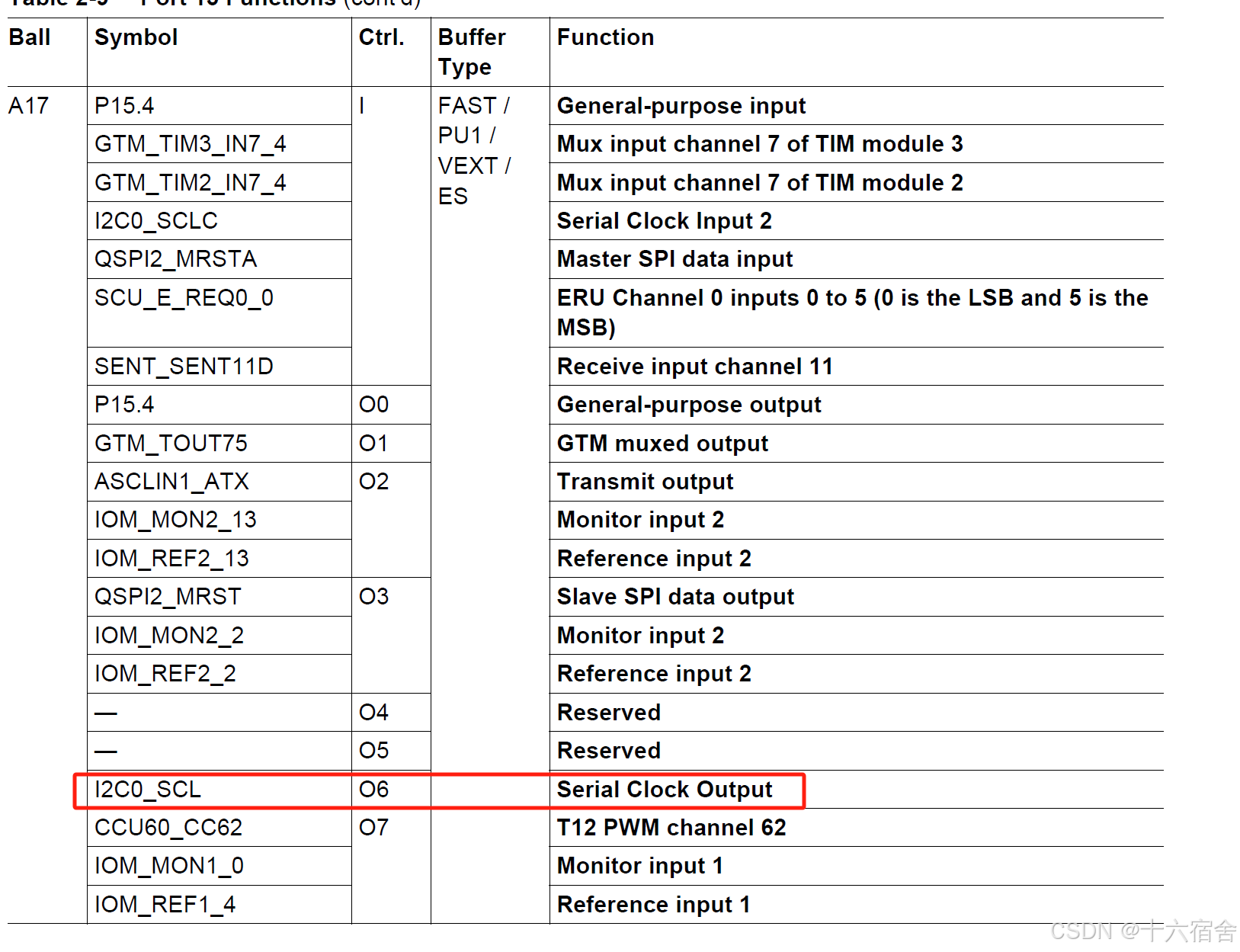
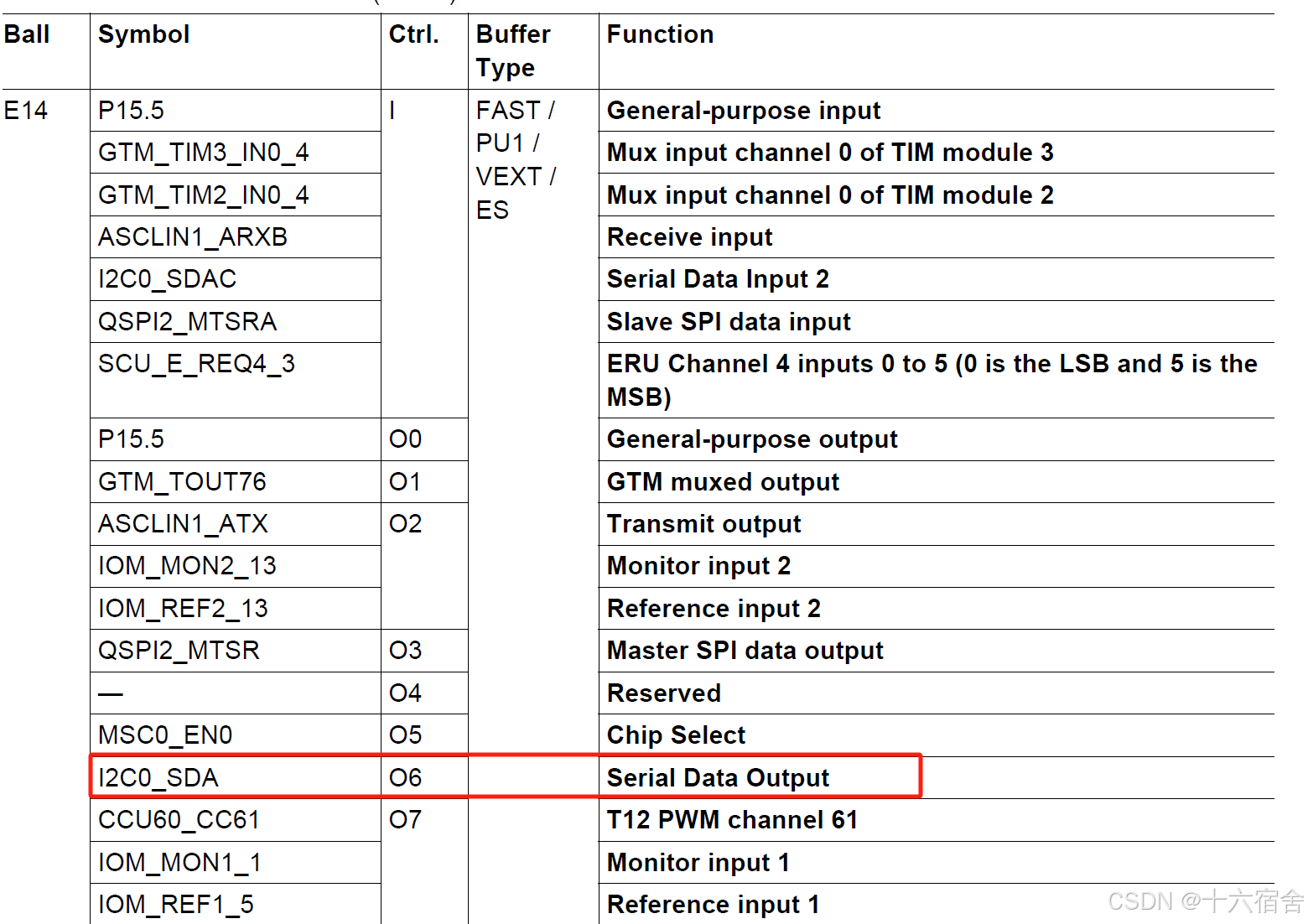
注意SDA需要配置成开漏输出。
I2C
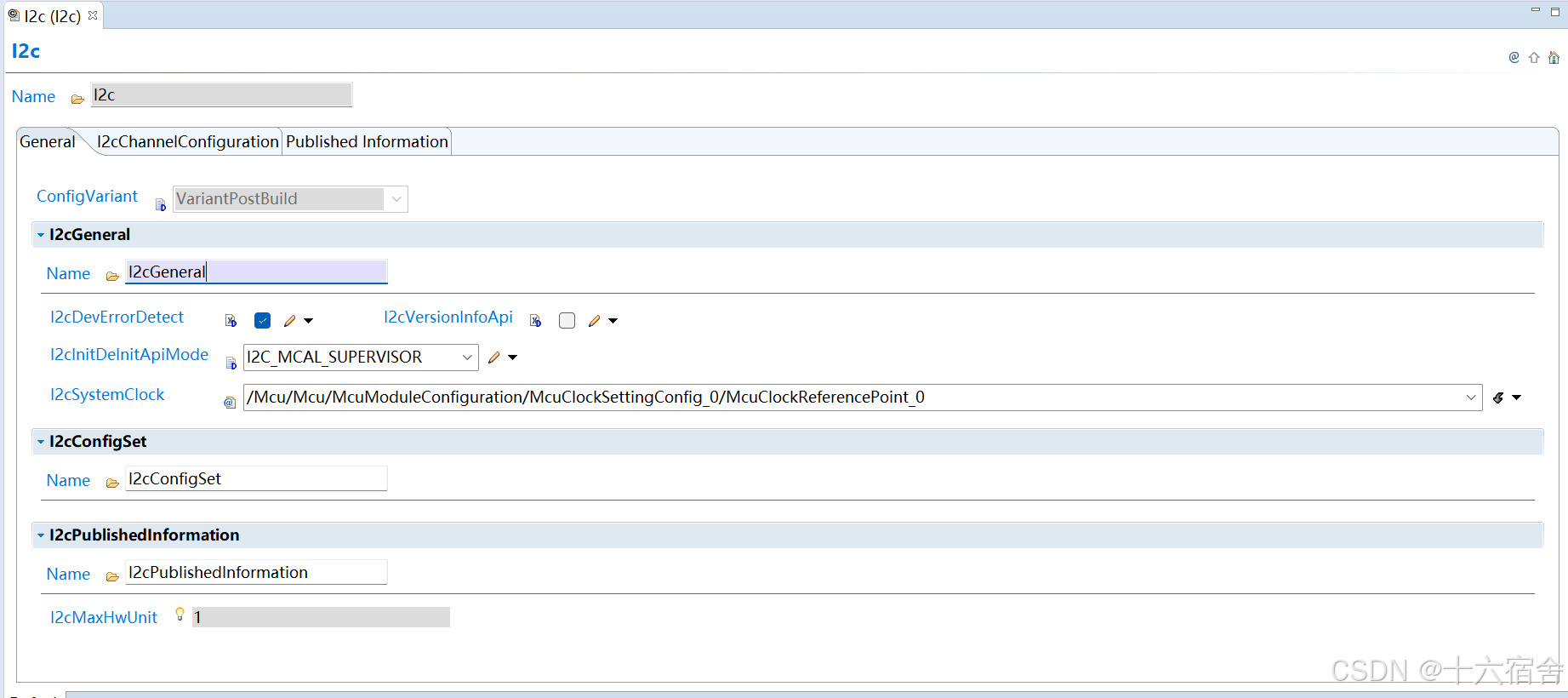
General
跟其他的模块差不多,都是包含了一些API使能,错误检测以及时钟选择等。
I2cChannelconfiguration
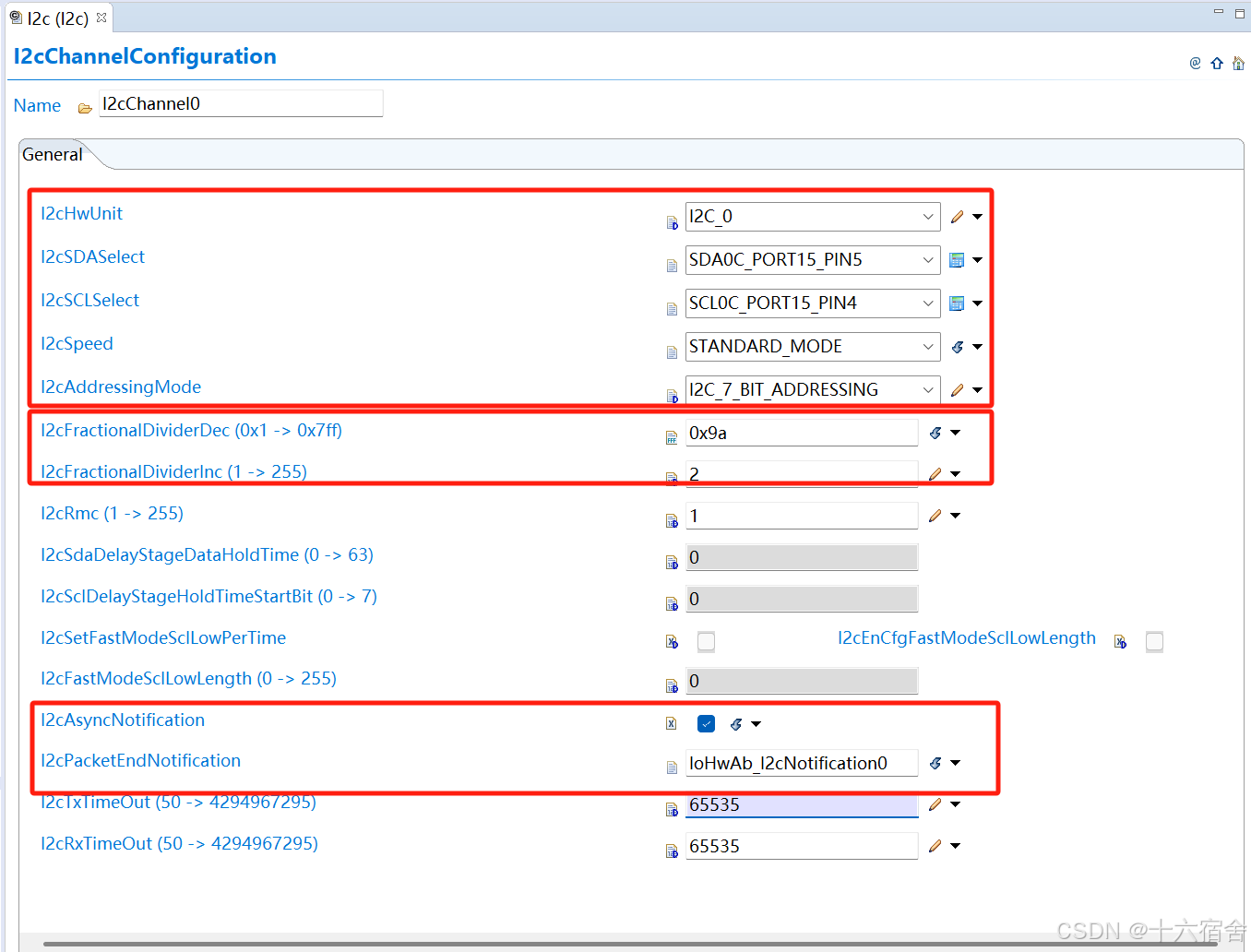
我们需要关注的配置项包括:
-
I2cHwUnit:此参数选择要分配给通道的硬件单元。
-
I2cSDASelect:该参数选择SDA对应的引脚端口。
-
I2cSCLSelect:该参数选择SCL对应的引脚端口。
-
I2CSpeed:定义了数据传输速度的模式信息,包括STANDARD_MODE、FAST_MODE、HIGH_SPEED_MODE。
-
I2cAddressingMode:这个参数定义了寻址模式(7/10位),需要寻址slave。
-
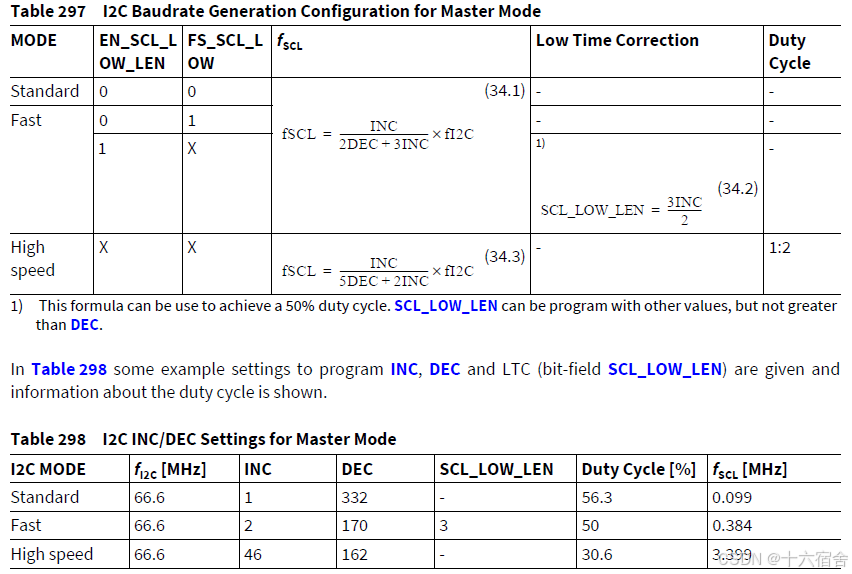
I2cFractionalDividerDec:该参数包含了小数分法器的DEC值。
-
I2cFractionalDividerInc:此参数包含了小数分发器的INC值。它跟I2cFractionalDividerDec、I2CSpeed共同决定了I2C的通信速率,下面是手册中包含的计算方法。
-
I2cRmc:该参数包含CLC1寄存器的I2cRmc值。
-
I2cAsyncNotification :是否启用回调函数。
-
I2cPacketEndNotification:回调函数名。
-
I2cTxTimeOut:该参数包含写操作的超时值。
-
I2cRxTimeOut:该参数包含读操作的超时值。
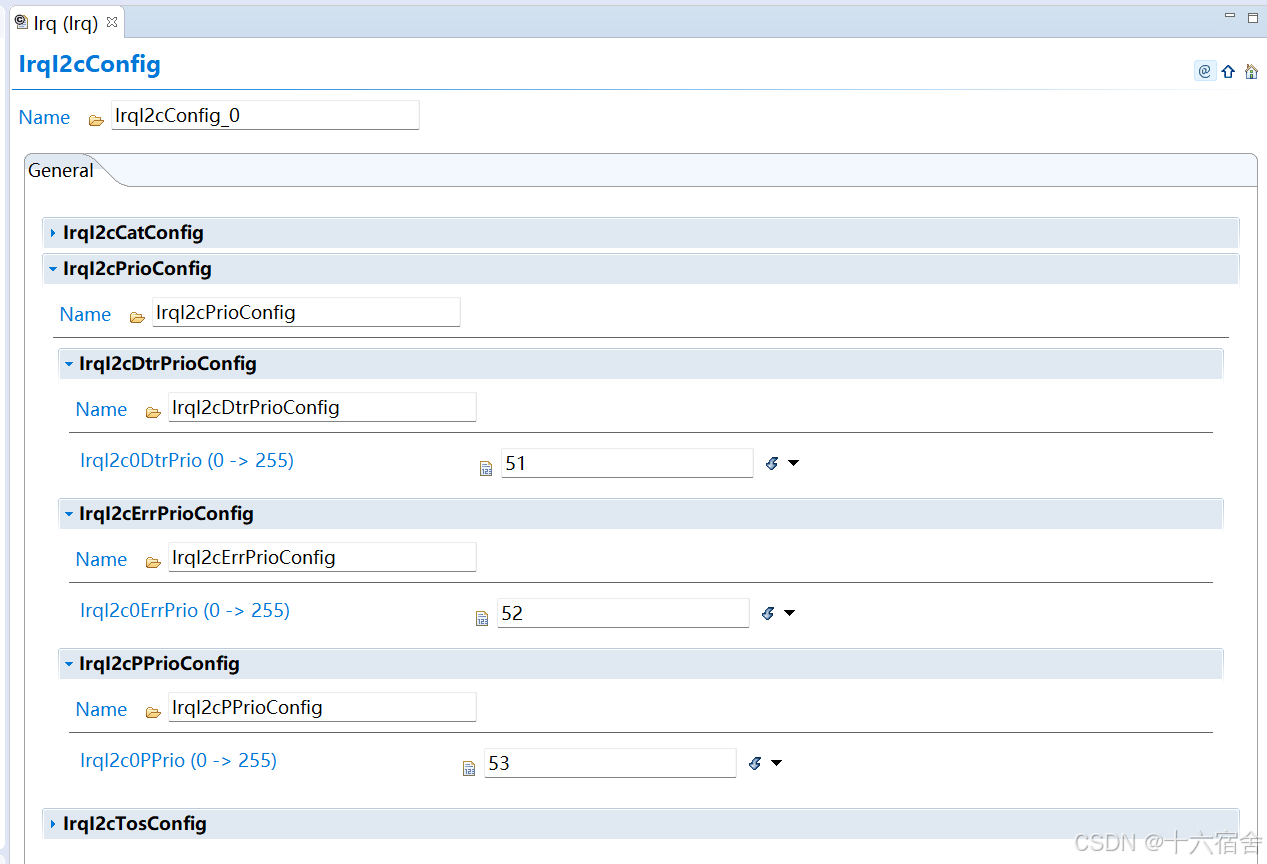
IRQ
配置对应中断优先级,打开相应中断。
I2C驱动调试
测试代码
测试代码如下,可以看到它给MCP79411发送完I2C设备地址1010111(0x57)之后,在写入了要读取的EEPROM地址0xF2之后,然后再向同样的设备地址发送读取6字节ID数据。代码分别实现了异步和同步I2C操作,通过条件编译宏I2CASYENABLE区分。I2cDemoInit实现了I2C的初始化,异步的需要完成中断的配置,I2C_DemoFunction完成使用I2C读取MCP79411中设备的6字节ID数据(分为同步和异步),IoHwAb_I2cNotification0则是中断的回调函数,若协议中断的返回不是I2C_NO_ERR,则进入死循环。
cpp
void I2cDemoInit()
{
#if I2CASYENABLE
IrqI2c_Init();
SRC_I2C0DTR.B.SRE = 1;
SRC_I2C0ERR.B.SRE = 1;
SRC_I2C0P.B.SRE = 1;
#endif
I2c_Init(&I2c_Config);
}
#define MCP79411_EEPROM_ADDRESS 0x57 /* 7 bit slave device address for reading from EEPROM
of MCP79411 is 0b1010111 which is 0x57. */
#define ADDRESS_OF_MAC_ADDRESS 0xF2 /* Location of EUI-48 node address (MAC address) */
#define LENGTH_OF_ADDRESS 1 /* Length of address of the register, in which the
requested MAC address is stored in bytes */
#define LENGTH_OF_MAC_ADDRESS 6 /* Length of the MAC address in bytes */
uint8 g_macAddr[LENGTH_OF_MAC_ADDRESS] = {0, 0, 0, 0, 0, 0}; /* Global parameter for 6-byte EUI-48 MAC address */
#define I2C_USER_CHANNEL0 (0)
I2c_ChannelStatusType I2c_GetStatuss = I2C_UNINIT;
void I2C_DemoFunction(void)
{
/* Address of 6-byte EUI-48 MAC address location */
uint8 i2cTxBuffer[1] = {ADDRESS_OF_MAC_ADDRESS};
#if I2CASYENABLE
//Async read operation
I2c_AsyncWrite(I2C_USER_CHANNEL0, &i2cTxBuffer[0], LENGTH_OF_ADDRESS, MCP79411_EEPROM_ADDRESS);//write read address
while(I2c_GetStatus(I2C_USER_CHANNEL0) == I2C_BUSY);
I2c_AsyncRead(I2C_USER_CHANNEL0, &g_macAddr[0], LENGTH_OF_MAC_ADDRESS, MCP79411_EEPROM_ADDRESS);//read register
while(I2c_GetStatus(I2C_USER_CHANNEL0) == I2C_BUSY);
#else
I2c_SyncWrite(I2C_USER_CHANNEL0, &i2cTxBuffer[0], 1, MCP79411_EEPROM_ADDRESS);//write read address
I2c_SyncRead(I2C_USER_CHANNEL0, &g_macAddr[0], 6, MCP79411_EEPROM_ADDRESS);//read register
#endif
}
#endif
void IoHwAb_I2cNotification0(I2c_ErrorType ErrorId)
{
count++;
if(ErrorId)
{
while(1);
}
}测试结果
我们连接X102引出的引脚之后,可以通过逻辑分析仪测量实际的信号,可以得到如下的结果:
- 发送:0xAE 0xF2
- 接收:0xAF 0xE8 0xD6 0x36 0x11 0x04 0x66
发送的地址为0x57,左移一位为0xAE,写的话最低位为0,则发送的第一个字节为0xAE,然后再发送我们想发送的EEPROM地址为0xF2,接收发送的第一个字节为0xAE+1(最低位为1表示接收),然后后边的6个字节即为地址0xF2下的6字节设备ID。

当然,您也可以在UDE观察g_macAddr数组的值。一般读取ID都是调试I2C的第一阶段,读到了就代表I2C已经通了。
十六宿舍 原创作品,转载必须标注原文链接。
©2023 Yang Li. All rights reserved.
欢迎关注 『十六宿舍』,大家喜欢的话,给个 👍 ,更多关于嵌入式相关技术的内容持续更新中。