一、《用于精确目标检测和语义分割的丰富特征层次结构》
1.1、基本信息
原文标题 :Rich feature hierarchies for accurate object detection and semantic segmentation
中文译名 :用于精确目标检测与语义分割的丰富特征层次结构
版本 :第5版技术报告(Tech report v5)
作者 :Ross Girshick等(UC Berkeley)
发表时间 :2014年(CVPR会议扩展版)
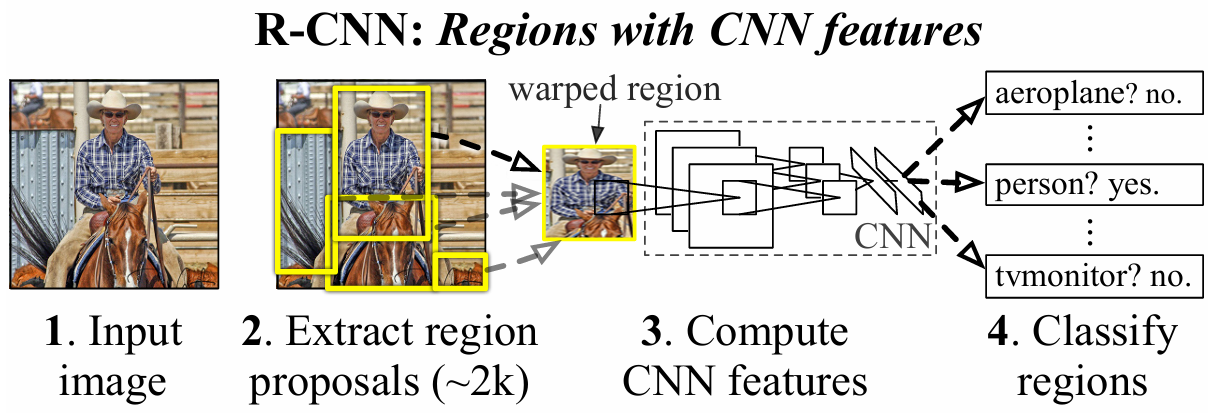
核心贡献 :提出R-CNN(Regions with CNN features)框架,首次将深度卷积网络(CNN)与区域提议方法结合,奠定两阶段目标检测范式基础。
作者主页:
rbg's home page
论文地址:1311.2524 Rich feature hierarchies for accurate object detection and semantic segmentation
1.2、主要内容
方法创新:
区域提议+CNN特征提取:通过选择性搜索(Selective Search)生成候选区域,后经CNN提取高层次特征。
端到端训练改进:针对小样本数据,采用预训练(ImageNet)+微调(PASCAL VOC)策略。
边界框回归:引入后处理步骤优化检测框定位精度。
技术突破:
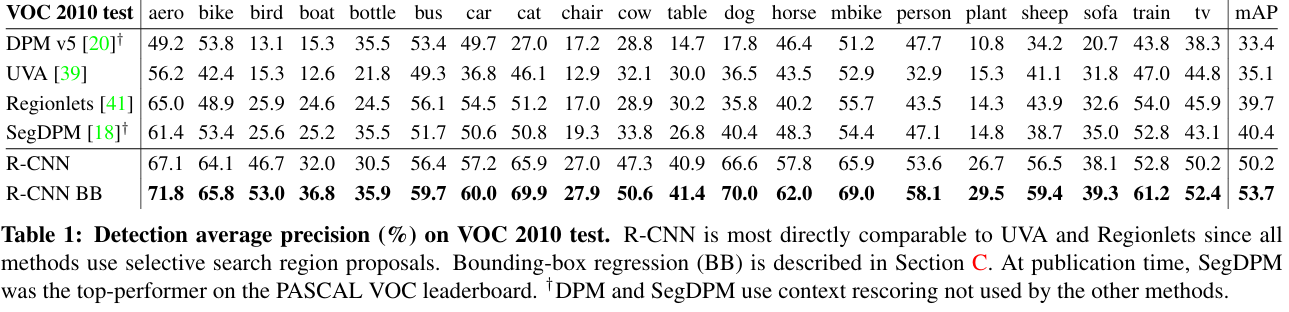
在PASCAL VOC 2012上将mAP从35.1%提升至53.7%,性能飞跃52%。
证明深层CNN特征对复杂视觉任务(检测/分割)的强表征能力。
局限性:
计算成本高(每张图需独立处理约2000个区域提议)。
训练流程非完全端到端(需分阶段优化)。
1.3、影响和作用
学术影响:开创基于深度学习的目标检测新范式,直接启发Fast R-CNN、Faster R-CNN、Mask R-CNN等后续工作。推动CNN在计算机视觉中的核心地位确立(CVPR 2014最佳论文提名)。
工业应用:成为自动驾驶(物体识别)、医学影像分析、卫星图像解译等领域的基础技术。相关思想延伸至自然语言处理(如区域提议+特征提取的类比应用)。
历史意义:被引用超2万次(截至2023年),誉为"目标检测领域的里程碑式研究"。
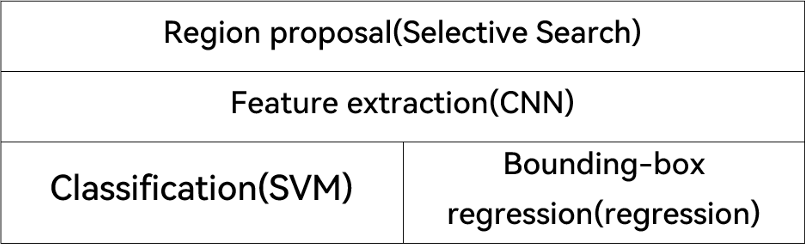
二、实现过程
-
候选区域生成:使用选择性搜索或其他方法生成约2000个候选区域 (使用Selective Search方法)。
-
特征提取:对每个候选区域使用卷积神经网络(通常是在ImageNet上 预训练的网络)提取固定长度的特征向量。
-
分类:使用支持向量机(SVM)对每个候选区域进行分类,判断其是否 包含特定类别的物体。
-
回归:使用回归器对每个候选区域的边界框进行微调,以更准确地定位 物体。
2.1、 候选区域生成
利用Selective Search算法通过分割生成候选区域(region proposals), 这些区域作为后续目标检测和分类的输入。Selective Search算法的主要目 标是通过合并和分割超像素(superpixels)来形成具有潜在目标的区域。
具体来说,Selective Search算法的实现步骤如下:
-
超像素分割: 首先,图像被分割成许多紧密相连的区域,这些区域称为超像素 (superpixels)。 超像素分割可以使用各种算法,如基于图的分割(例如图割算法) 或基于像素相似性的分割(例如SLIC算法)或者每个不同颜色的区 域代表一个超像素 。
-
相似性合并: 算法使用不同的合并策略来将这些超像素合并成更大的区域。这些 合并策略通常考虑颜色、纹理、大小和形状等特征的相似性。 合并策略包括贪婪合并、聚类合并、多尺度合并等,以便在不同尺 度上捕获不同类型和大小的目标。
-
生成候选区域:最终,Selective Search算法生成2000个左右的候选区域,每个区 域都有不同的形状、大小和位置。 这些候选区域被认为是图像中可能包含目标的位置,它们接下来会 被送入CNN进行特征提取和分类,以确定它们是否包含真正的目 标,并且进一步被用来进行目标检测。
Selective Search算法的核心思想是通过多尺度和多种合并策略,快速生成 丰富的候选区域,覆盖图像中各种潜在目标的可能位置。
2.2、特征提取
将2000个候选区域缩放到227*227的像素中,接着将缩放后的候选区域被 送入一个预训练的卷积神经网络(AlexNet)。
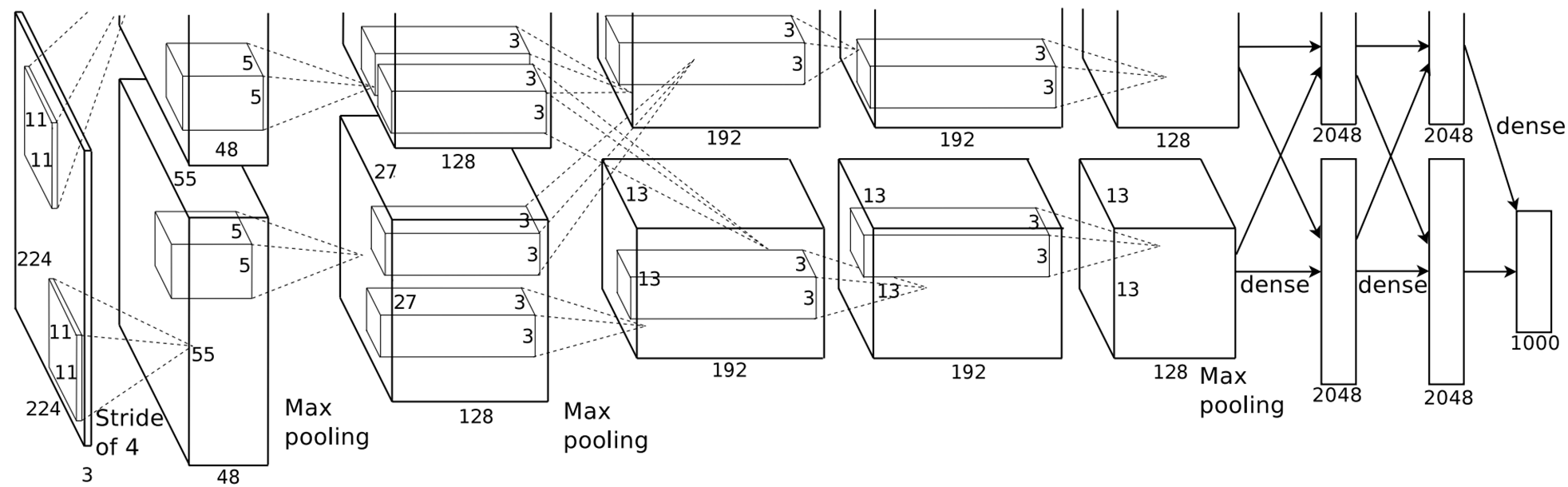
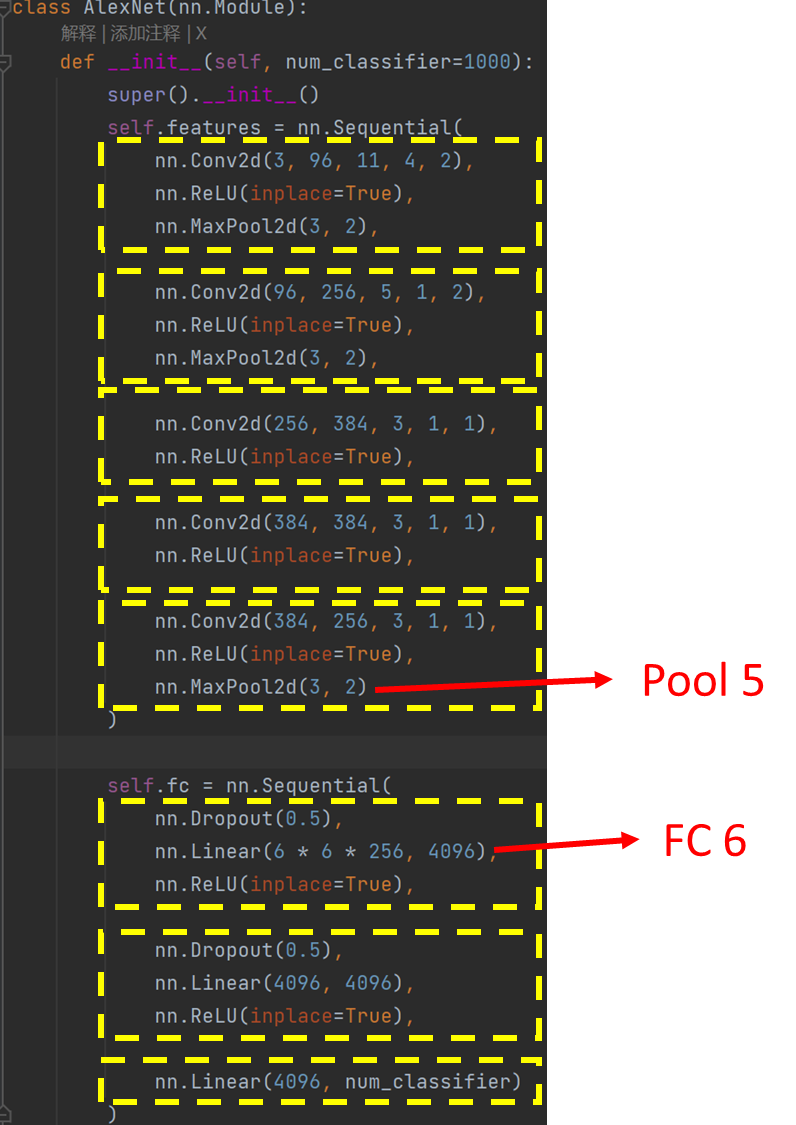
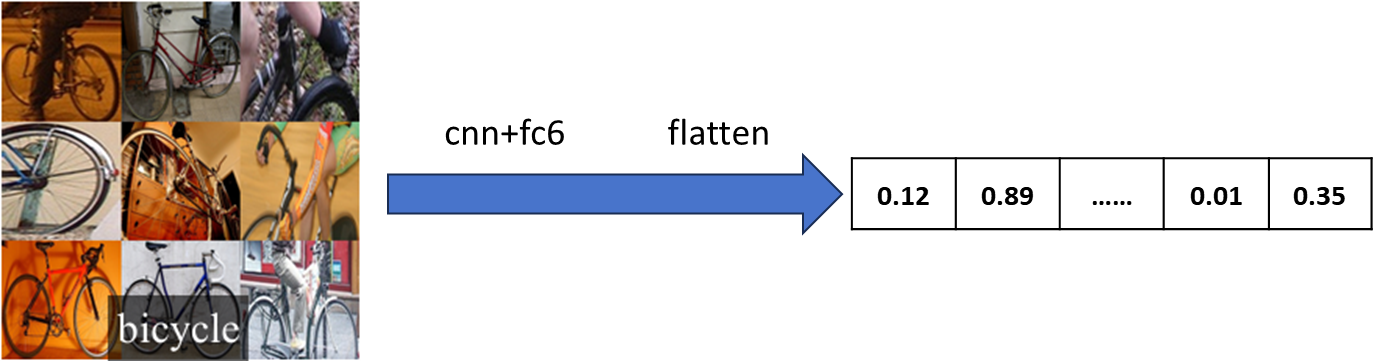
最终得到一个2000*4096的大矩阵
2.3、分类
使用支持向量机(SVM)对每个候选区域进行分类,具体过程为:
-
将2000*4096特征与20个SVM组成的权重矩阵(4096*20)相乘,得 到2000*20的矩阵;
-
获取2000*20维矩阵表示每个建议框是某个目标类别的得分;
-
对上述2000*20维矩阵中每一列,即每一类进行非极大值抑制剔除重叠 建议框,得到该列即该类中得分最高的一些建议框。
每个目标类别通常对应一个独立的支持向量机(SVM)分类器。 这意味着如果有N个不同的目标类别,就会训练和使用N个单独的SVM 分类器来对候选区域进行分类。Pascal VOC有20类,所以是20。
但是在例如Pascal VOC中微调时,实际上有21类,因为还有一类是背景, 即负样本。
负样本是根据IoU选择的,如果预选框和GT BOX的IOU小于一定的阈 值,那么就会被认为是负样本。
负样本的作用1、负样本在训练分类器时起到了重要作用,帮助模型学习如何区分目 标物体与非目标物体。分类器需要通过负样本学习背景的特征,以便 在推理阶段准确地将目标区域与背景区分开来。
2、训练过程中,平衡的正负样本比例有助于避免模型过度偏向负样本 而导致的分类器不平衡问题,从而提高模型的泛化能力和准确性。
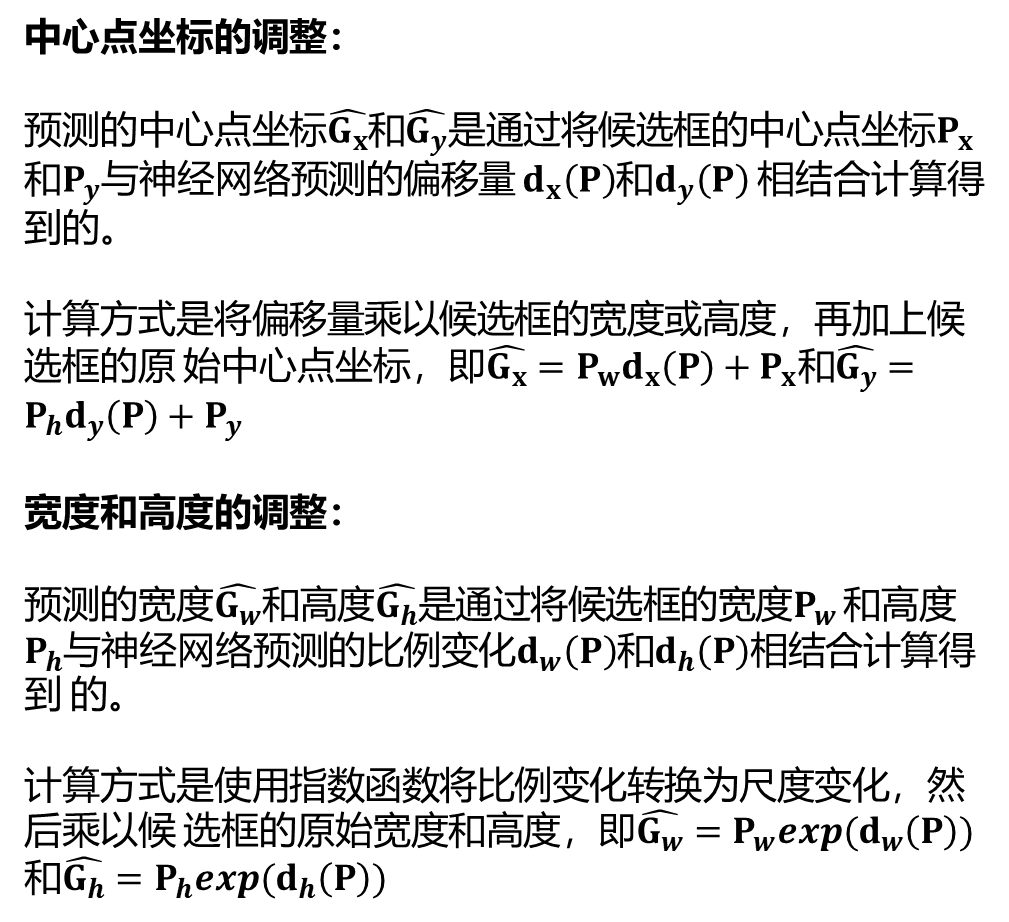
2.4、回归
使用回归器对每个候选区域的边界框进行微调,以更准确地定位物体,即 实际上SS的候选框(2000个)的位置也就是NMS处理后剩余的建议框(并 没有2000个了)的位置并不是那么准确,所以需要进行调整。
具体步骤
-
将所有的建议框和GT BOX进行IoU计算,小于某个阈值的直接删掉。
-
使用20个回归器对4096维的数据进行计算(Pascal VOC是21个)。
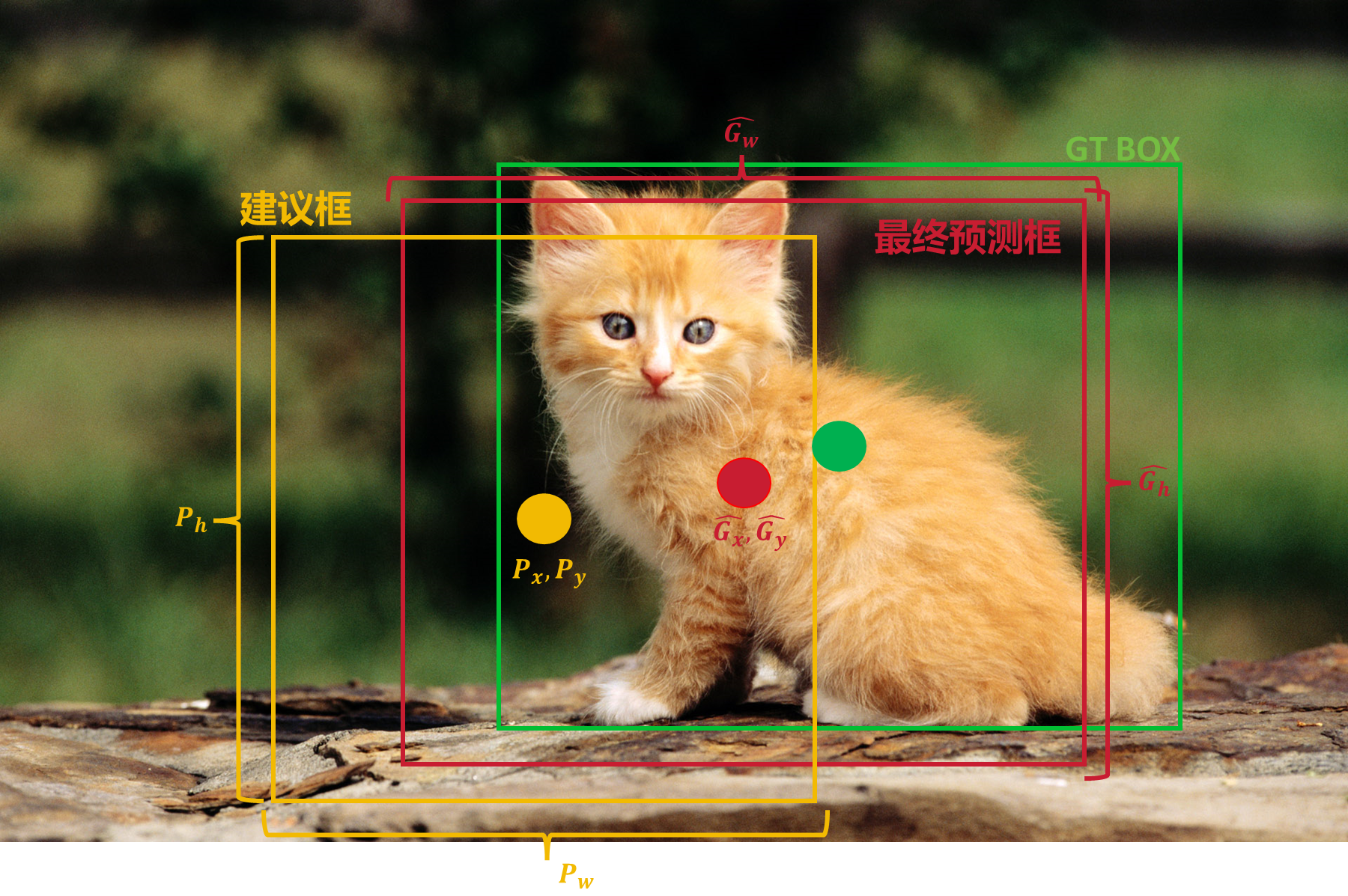
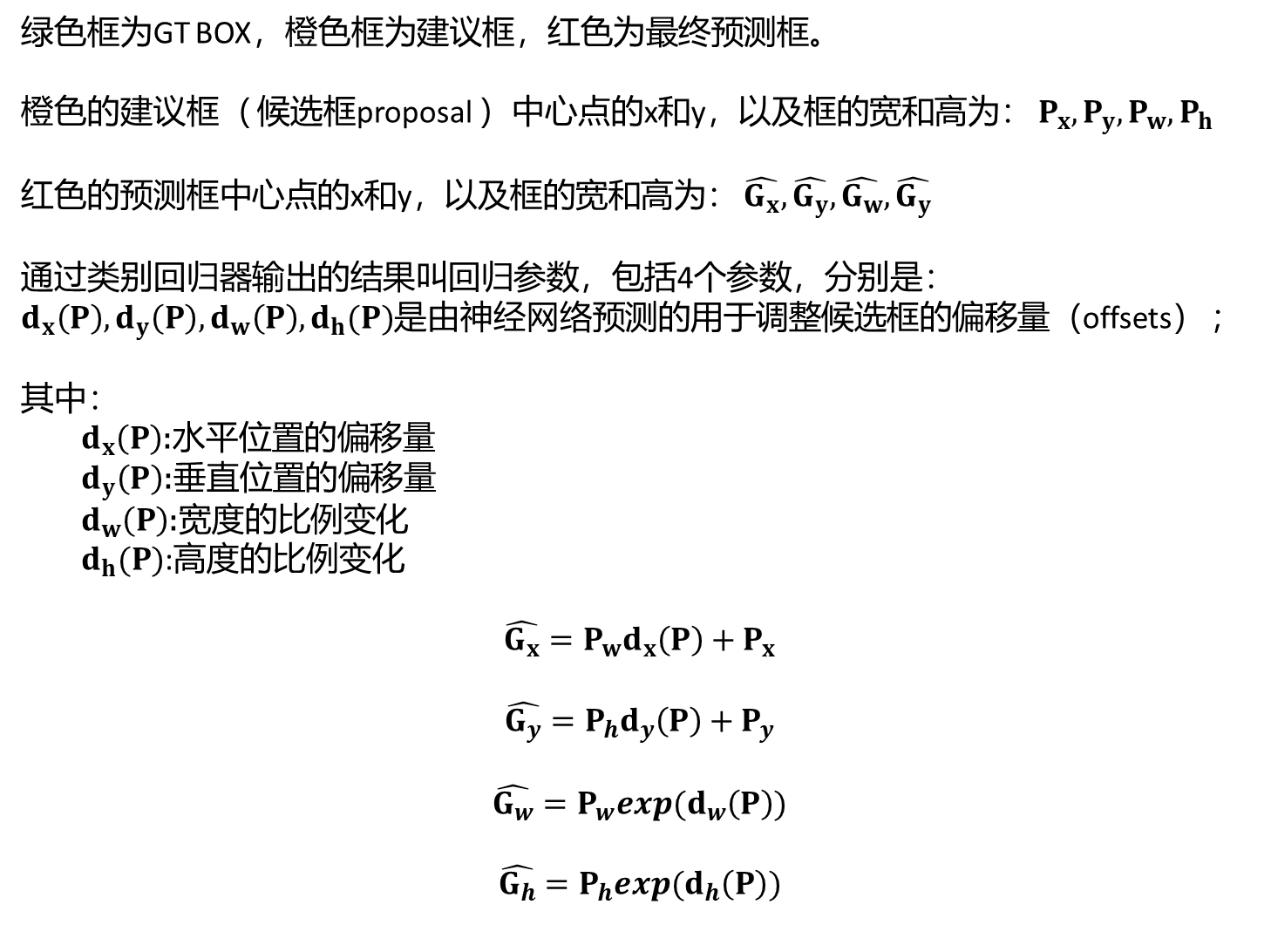
这些公式用于将网络预测的相对变化(偏移量)转换为绝对的边界框坐标 和尺寸。
三、R-CNN缺点
-
预测速度比较慢:CPU上53秒/张,GPU上13秒/张。
-
需要的内存较大:一个候选框4096维,一张图2000个候选框,如果有 1000张图,如果每个数是float32浮点型, 即每个数占用4字节(32 位) ,每个候选框占用内存为2096*4=16384个字节,换算成MB就是 16384/(1024^2)=0.015625MB, 那1张图所占的内存为0.015625*2000=31.25MB, 1000张图所占的内存为31.25*1000=31.25GB。
四、R-CNN过程总结