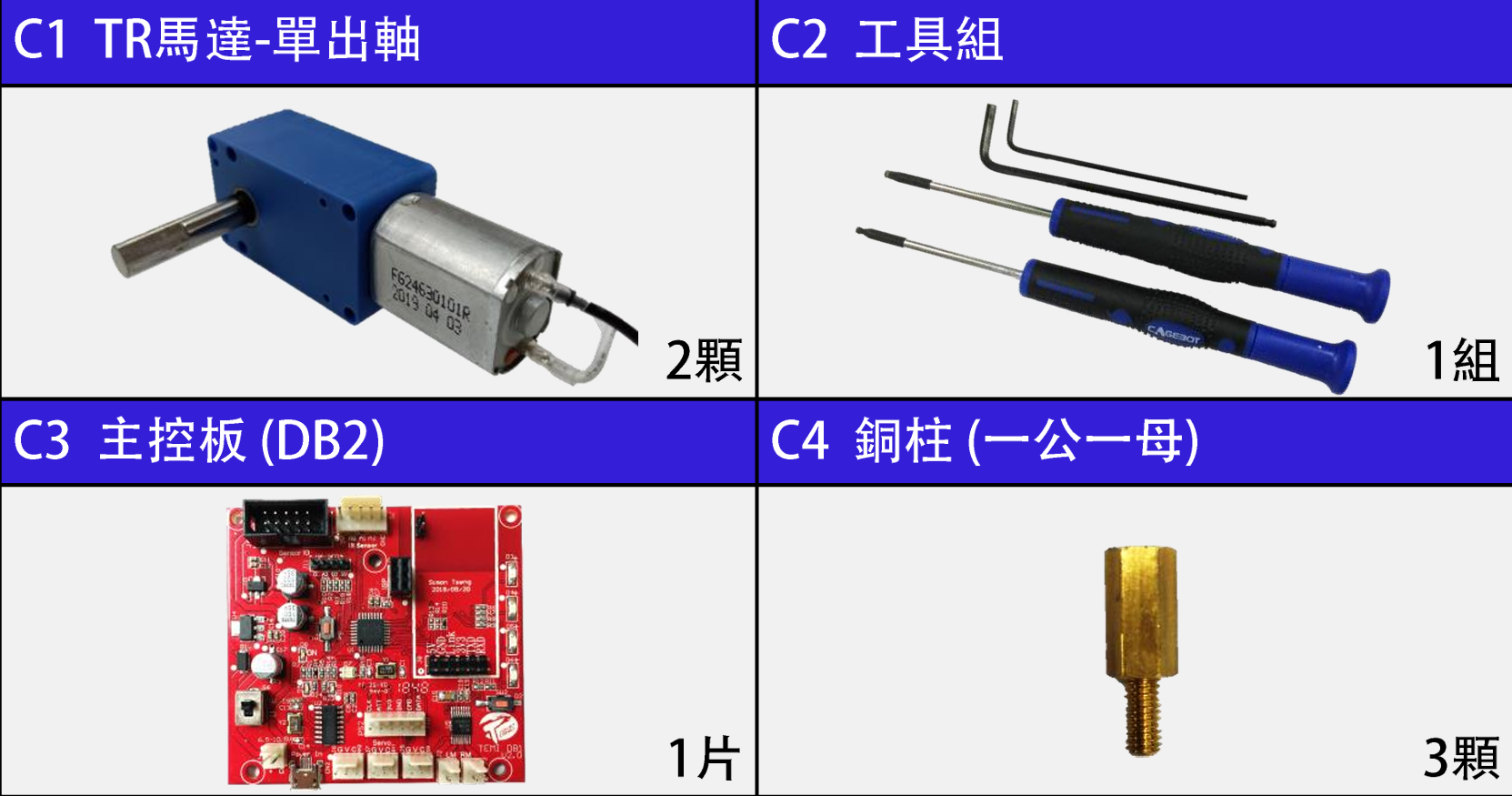
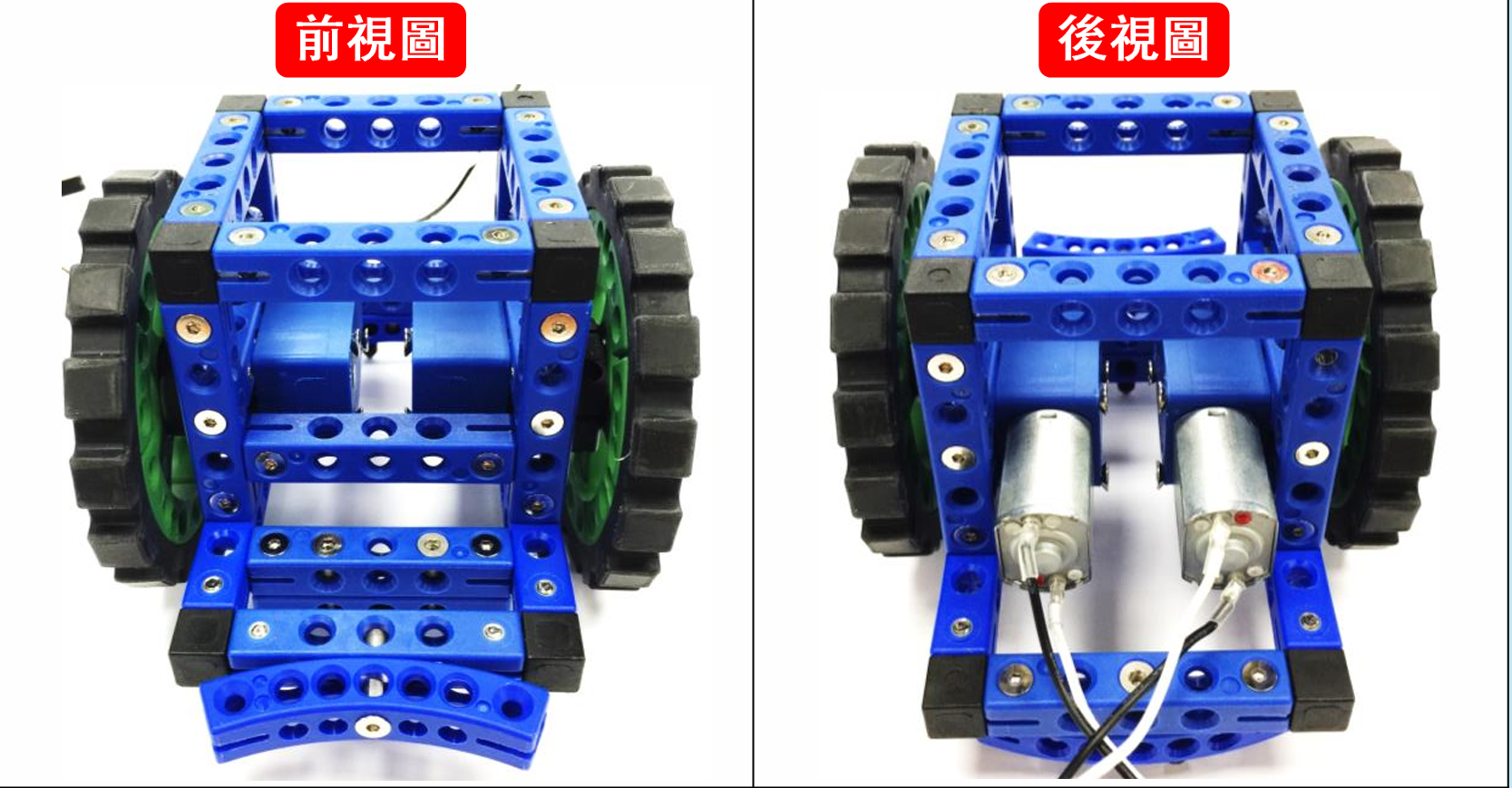
手工组件及组件材料
轮组部分

框架部分
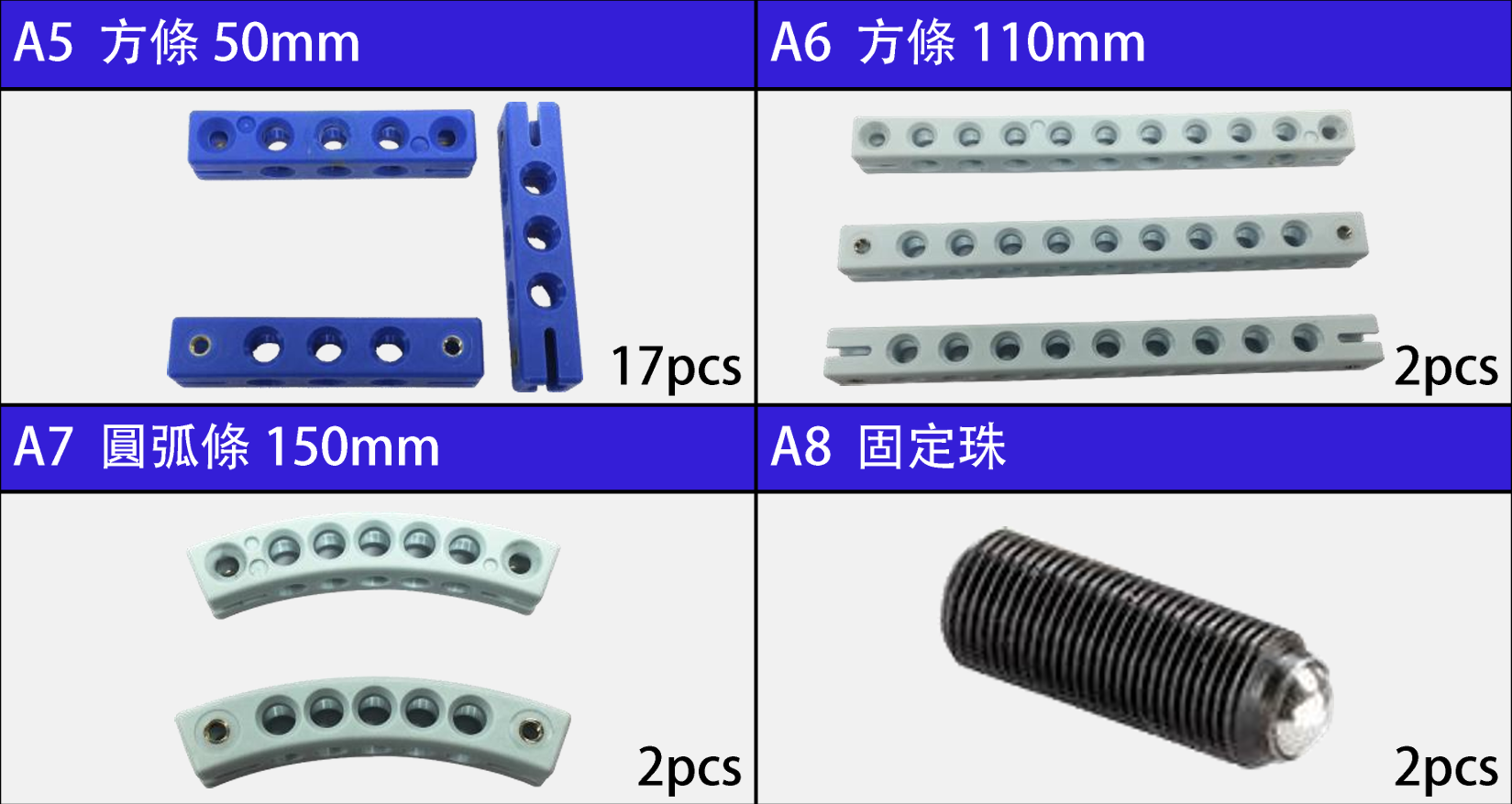
连接部分



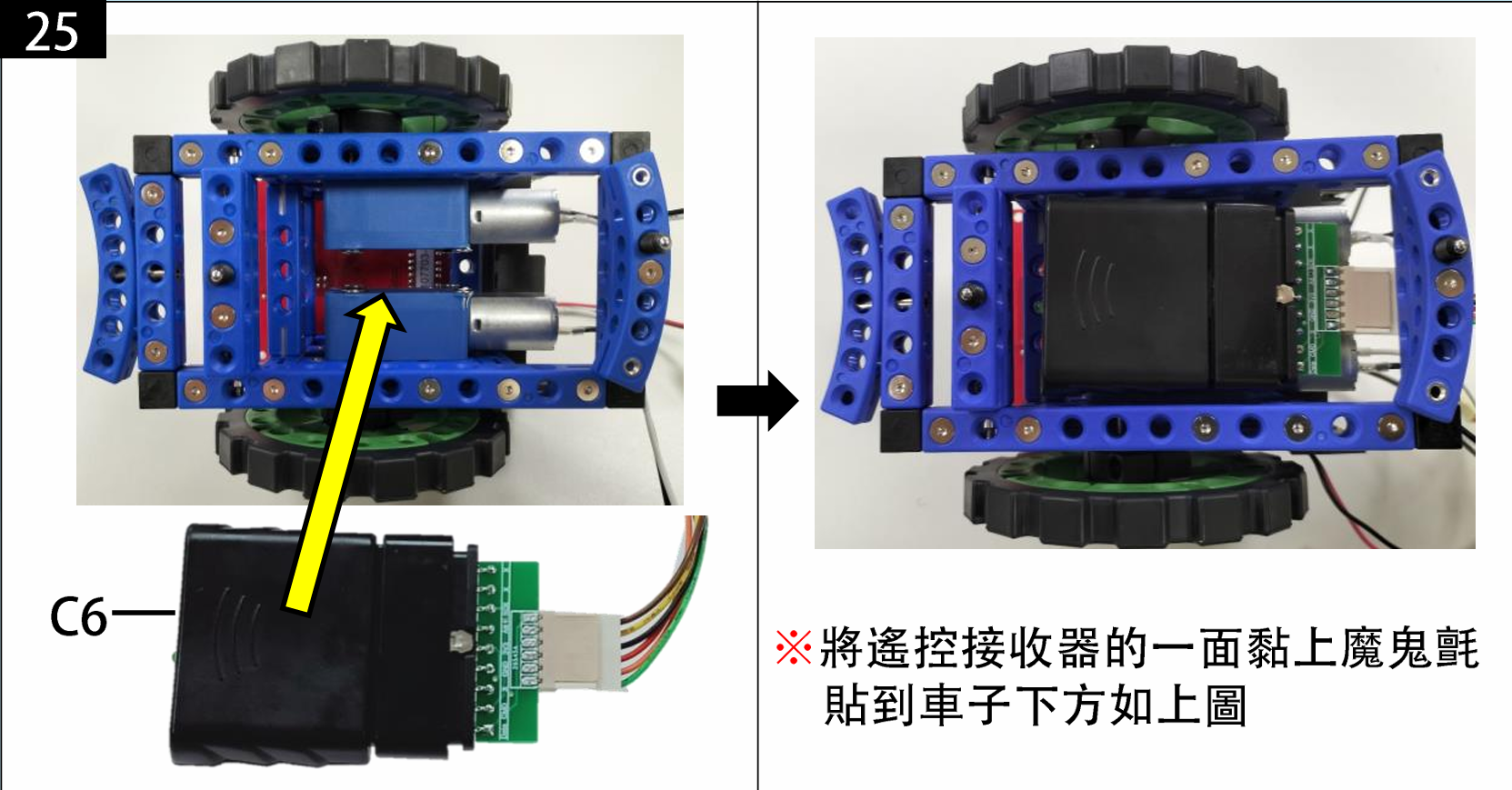
其他模块
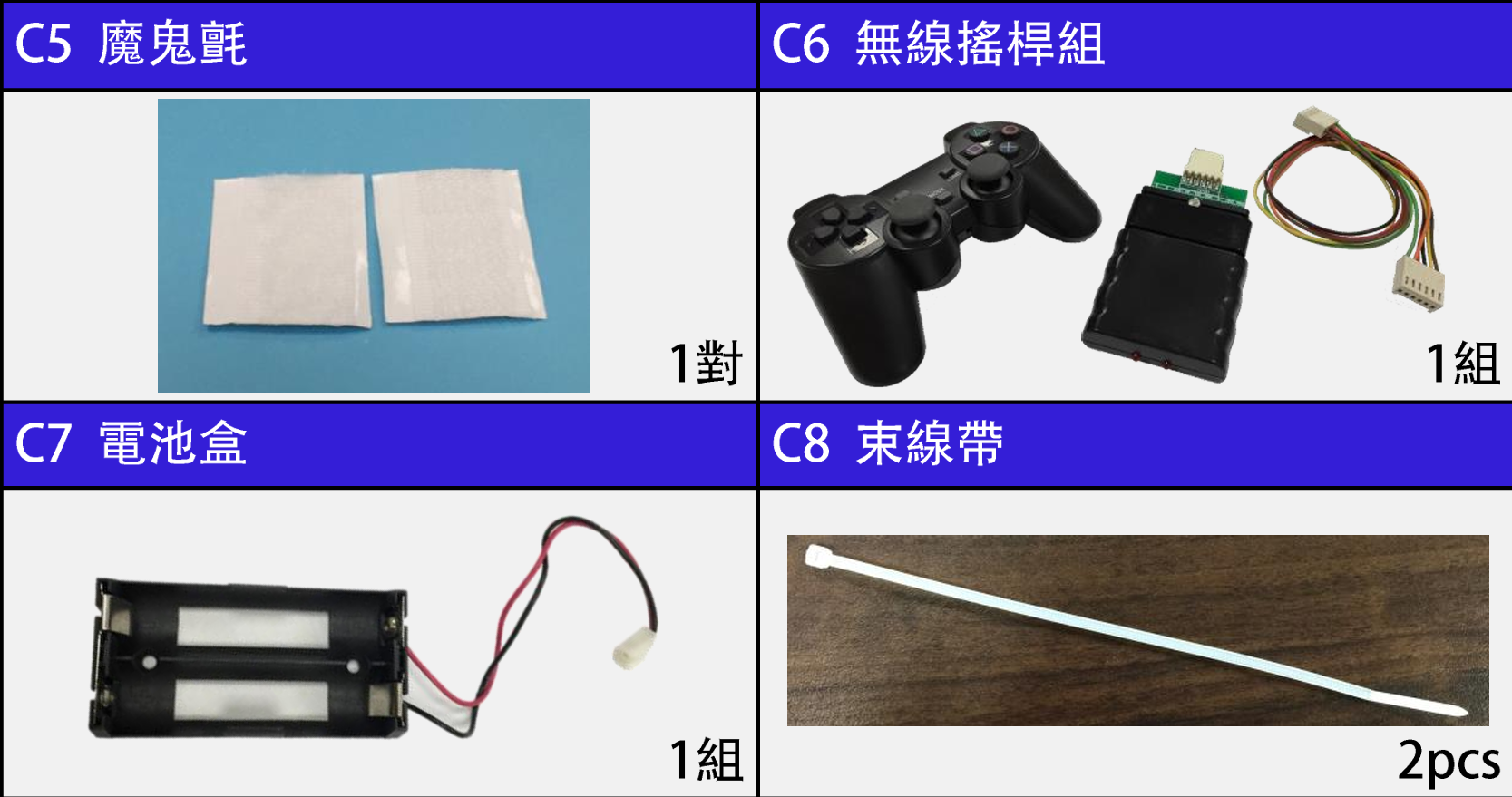
开发套件中可能没有魔术贴束线带,可以使用其他相似的物品进行替代
组装概念
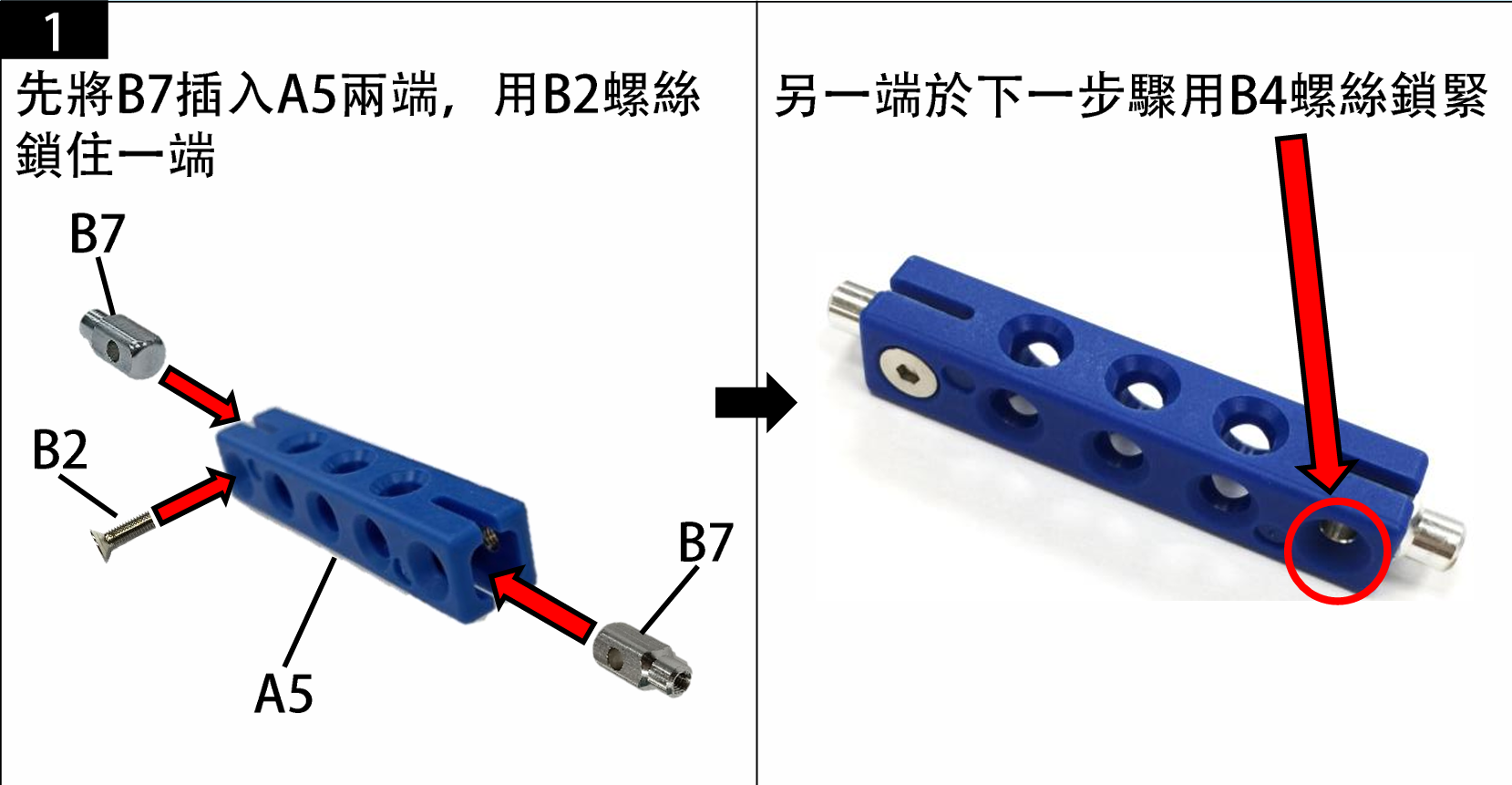
Tbot车体是由各种方条插入连接柱或多臂角连接件后,以六角螺丝起子锁紧固定而成
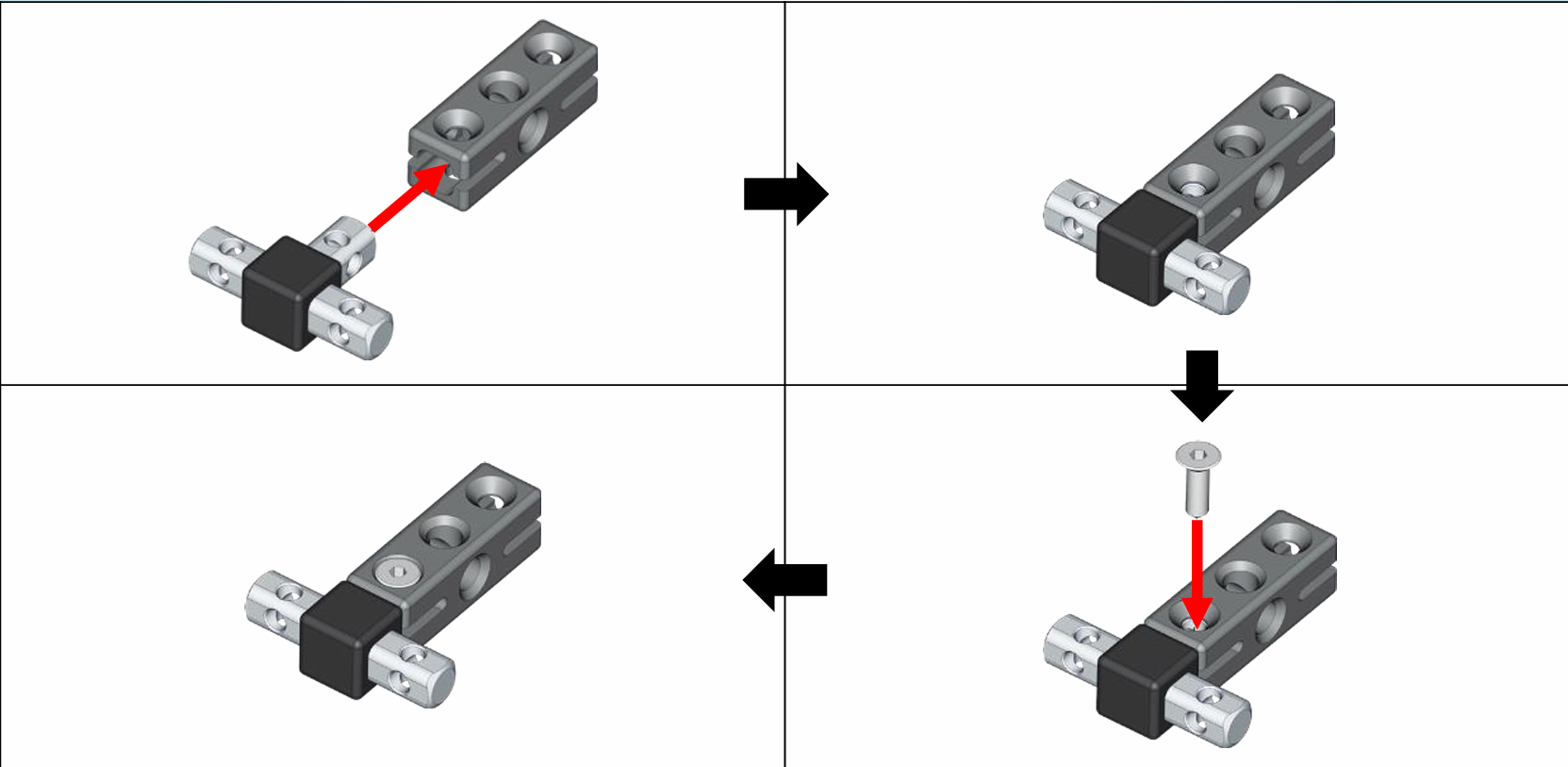
大孔:正面孔位,螺丝从此面锁入
小孔:背面孔位
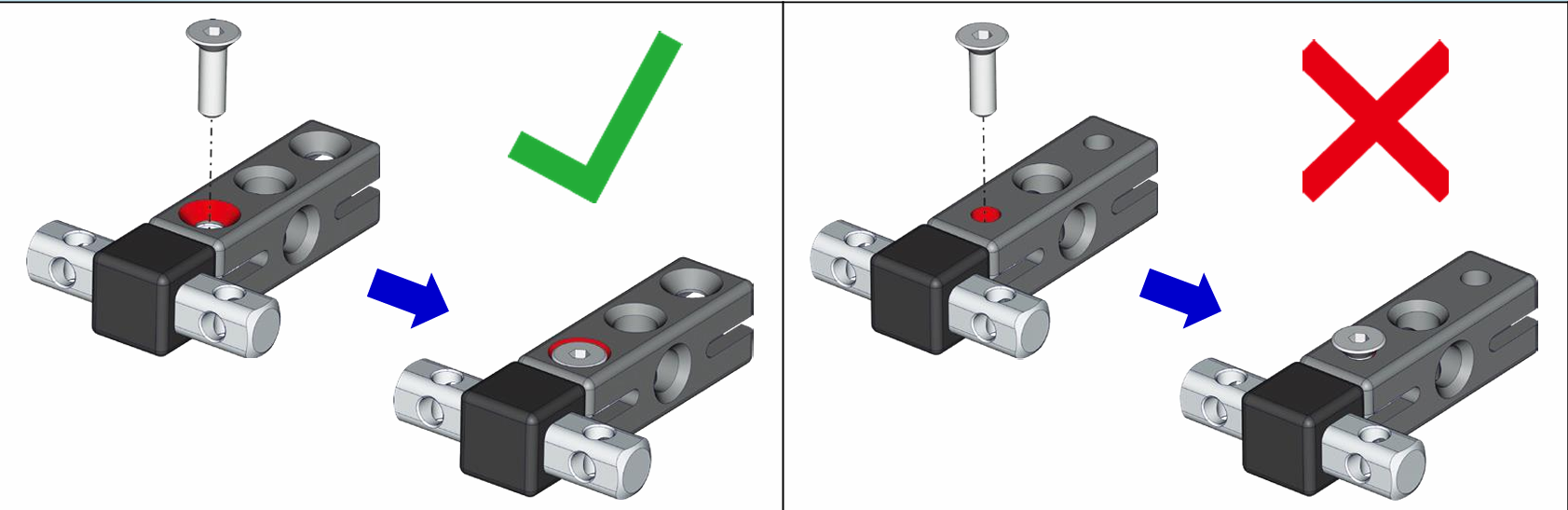
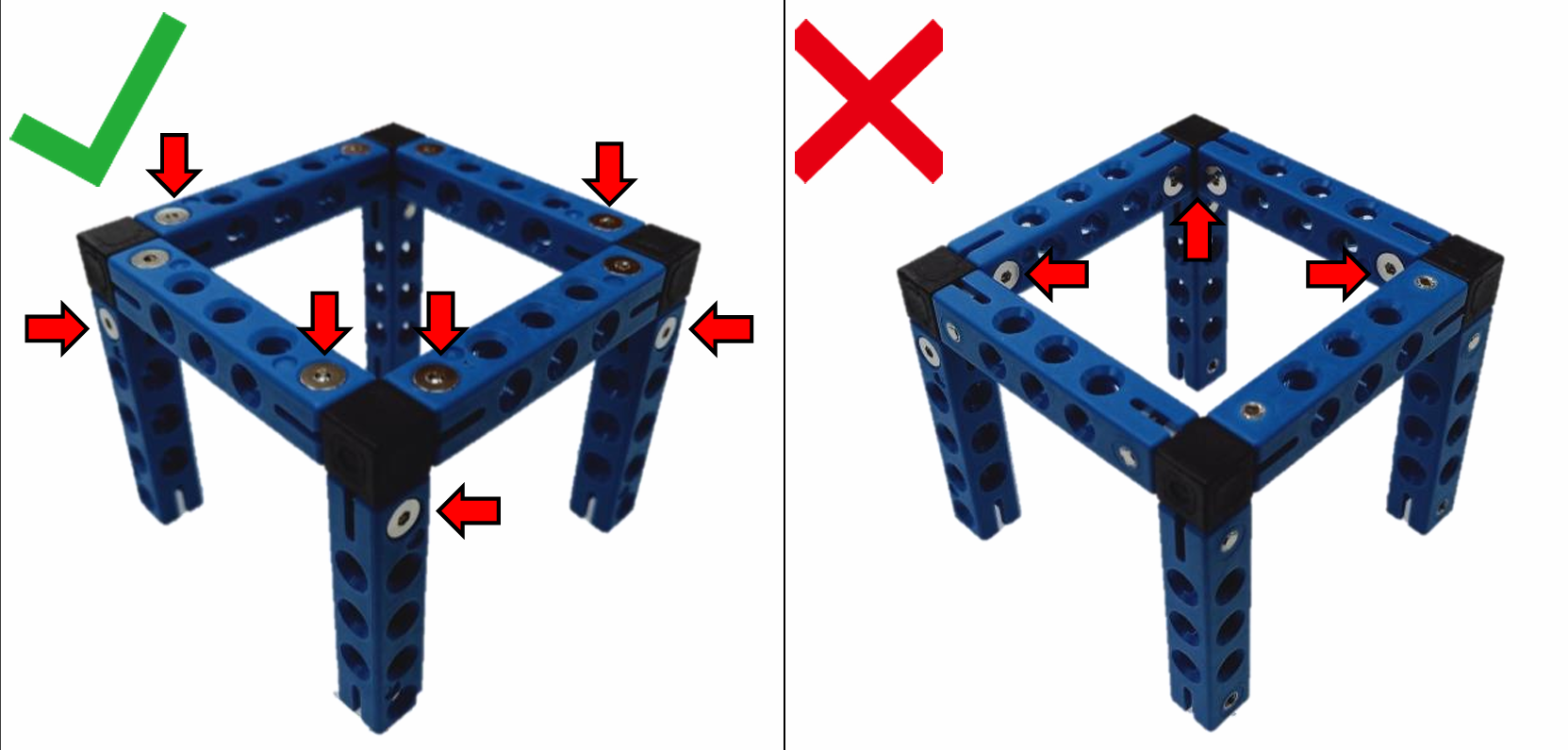
组装建议
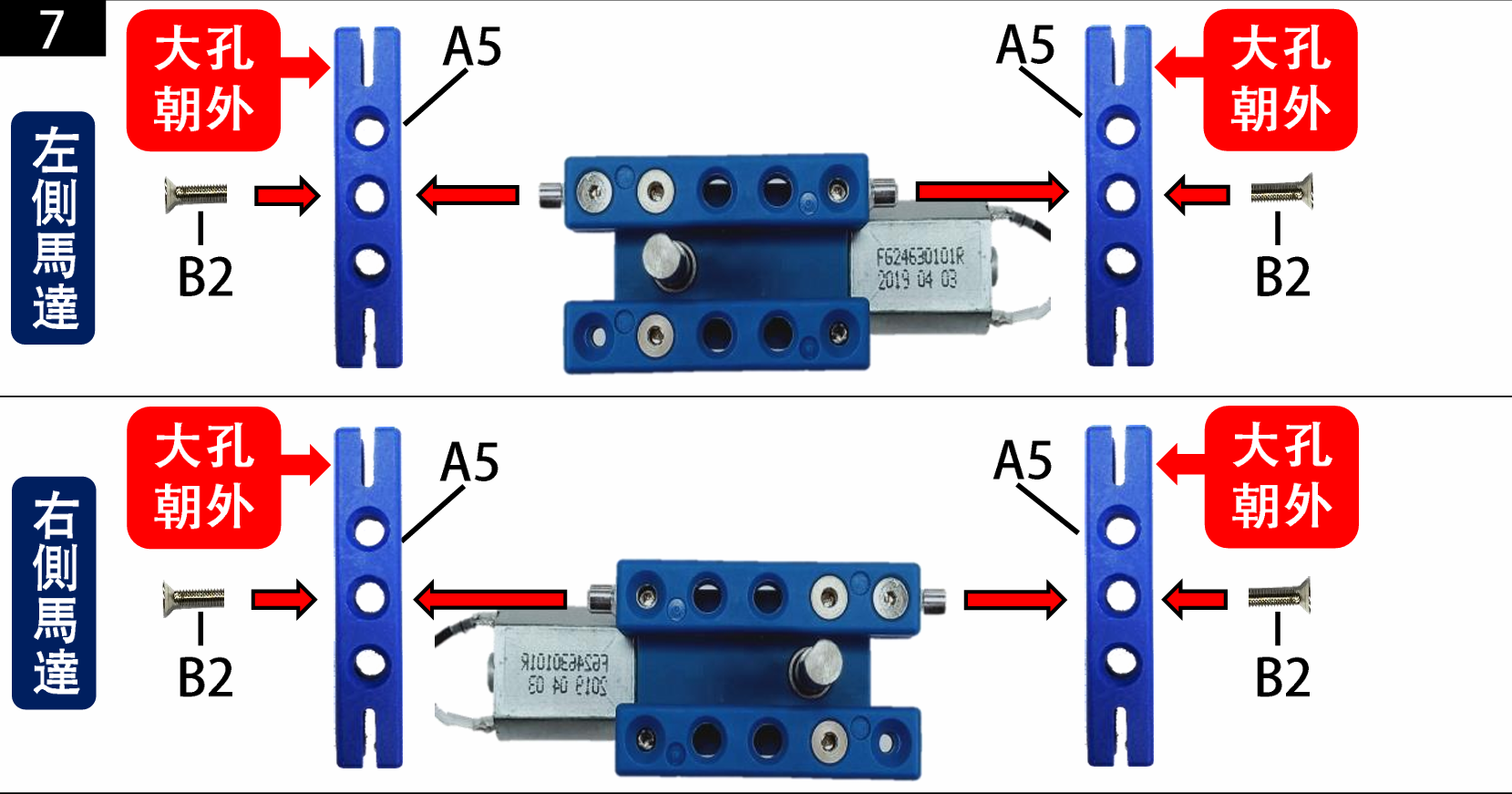
组装时, 尽量将螺丝由外朝内锁,方便在组装错误时更容易去拆卸更改,见下图
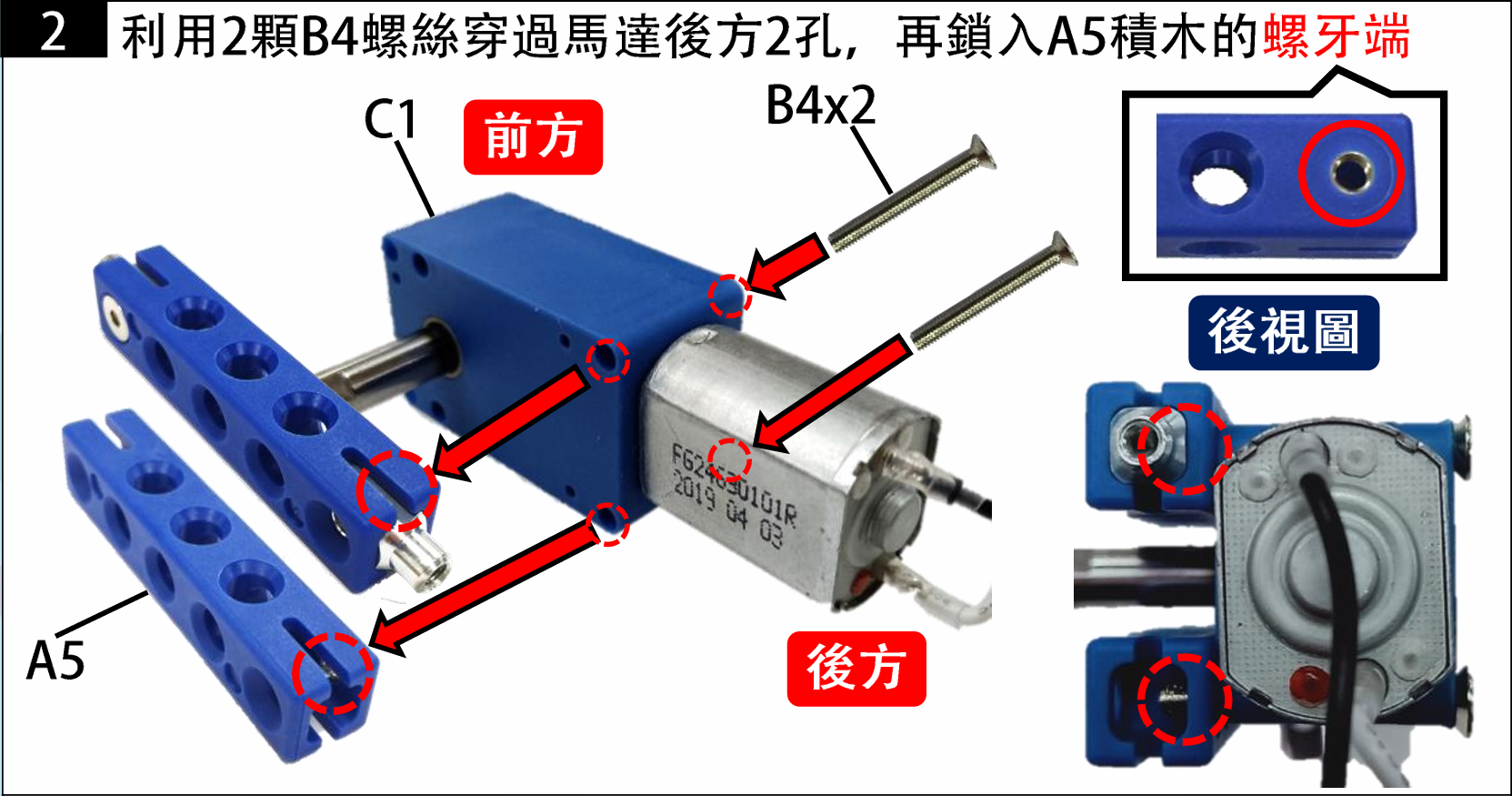
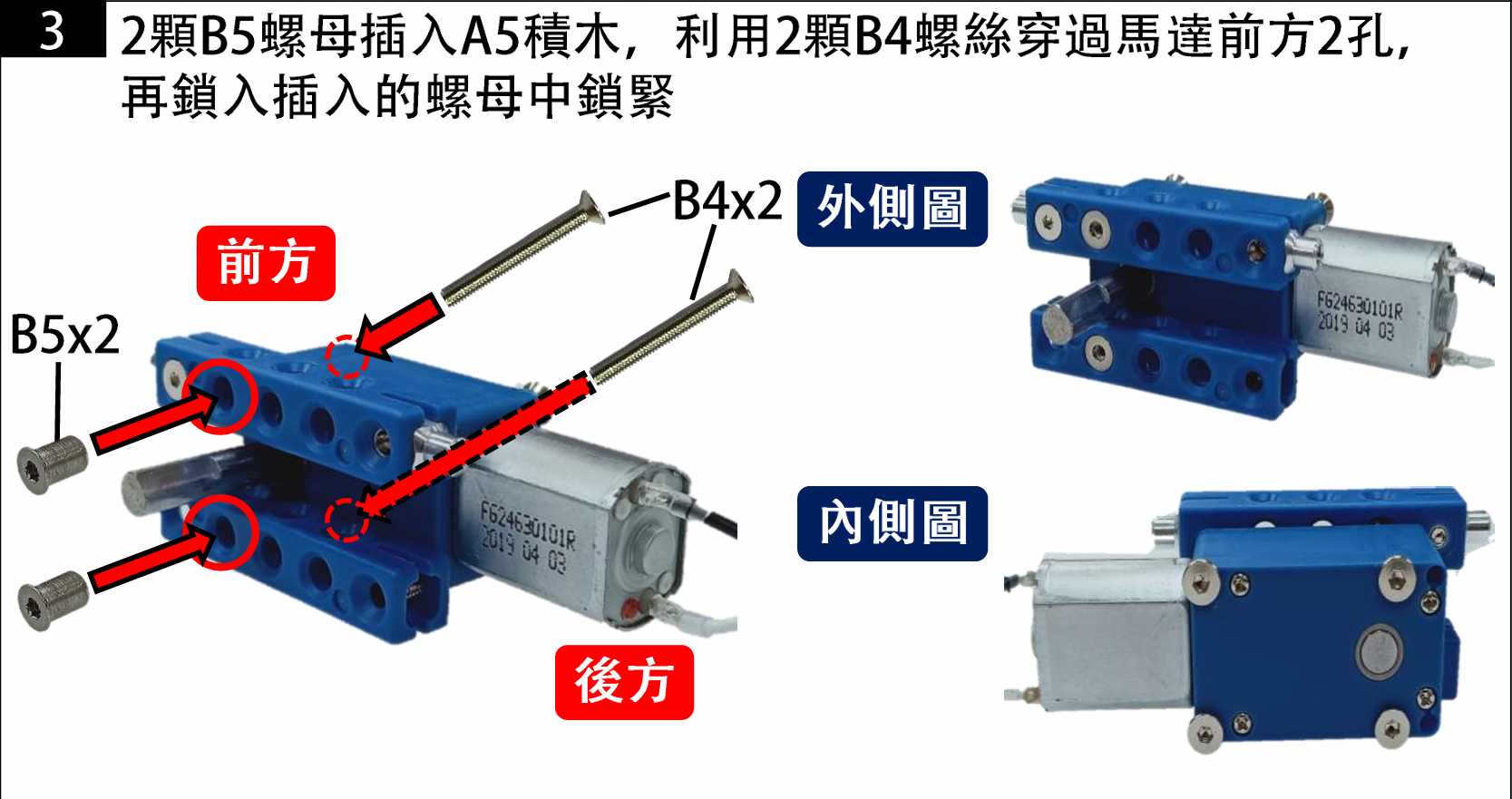
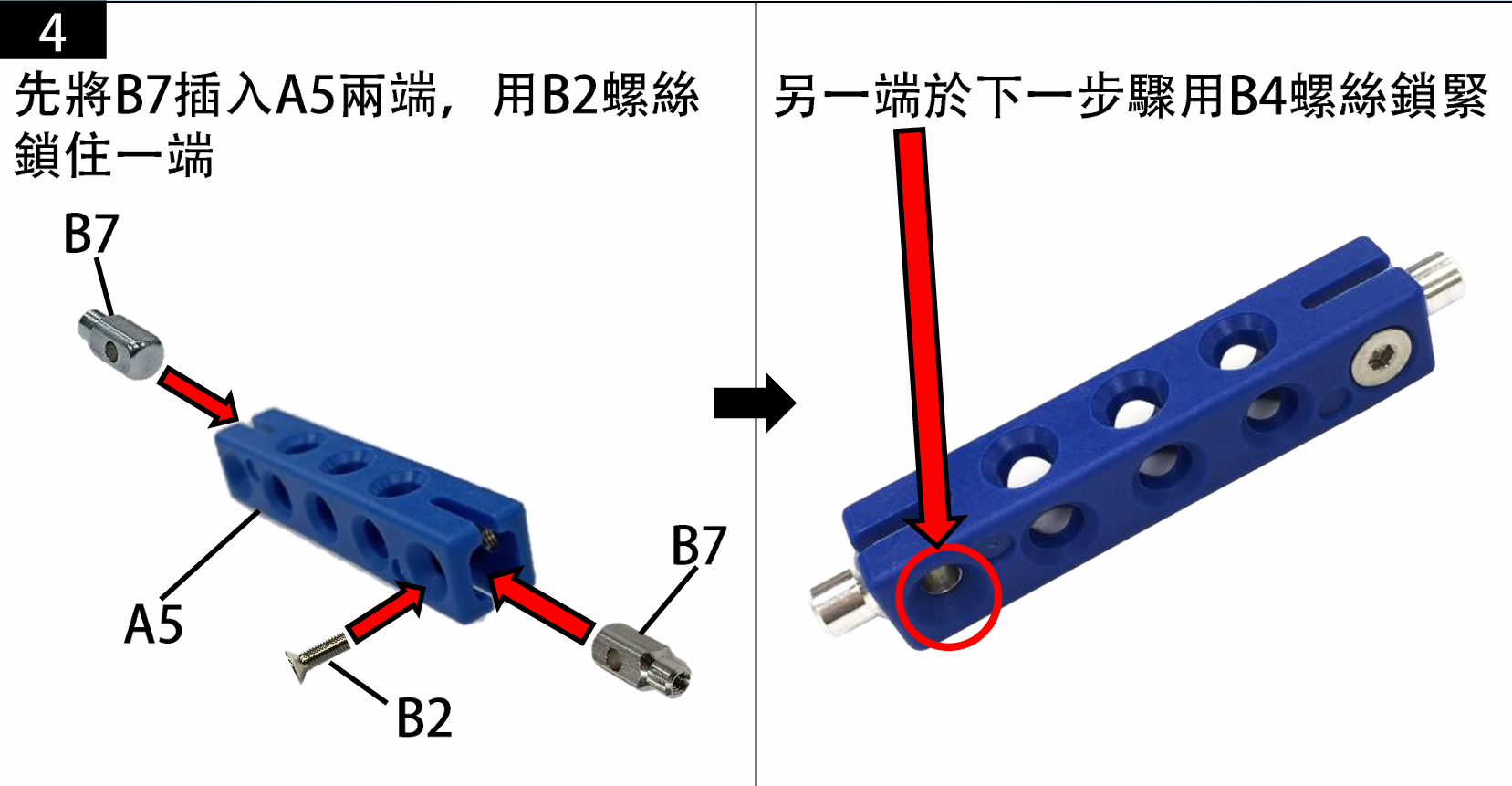
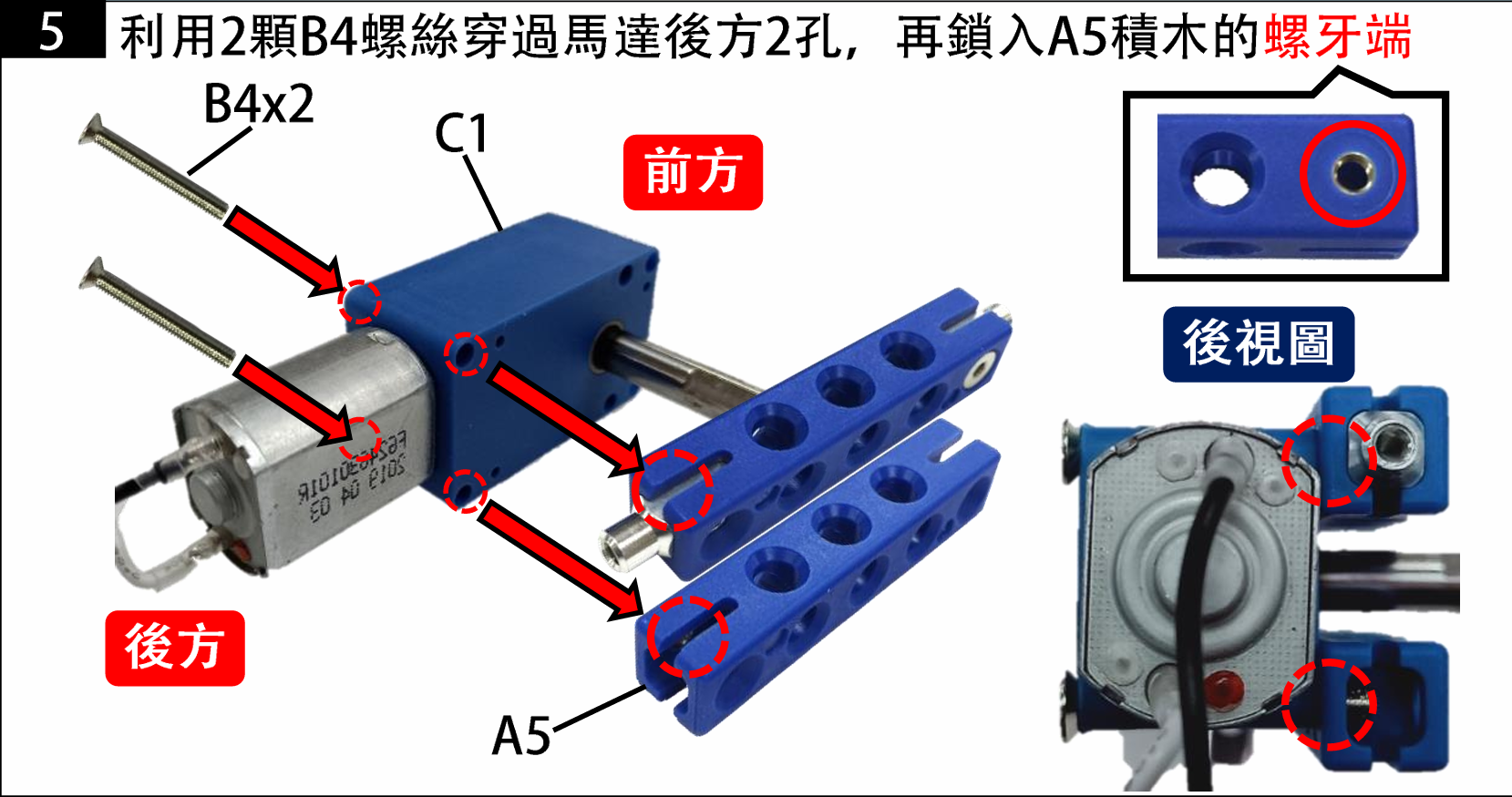
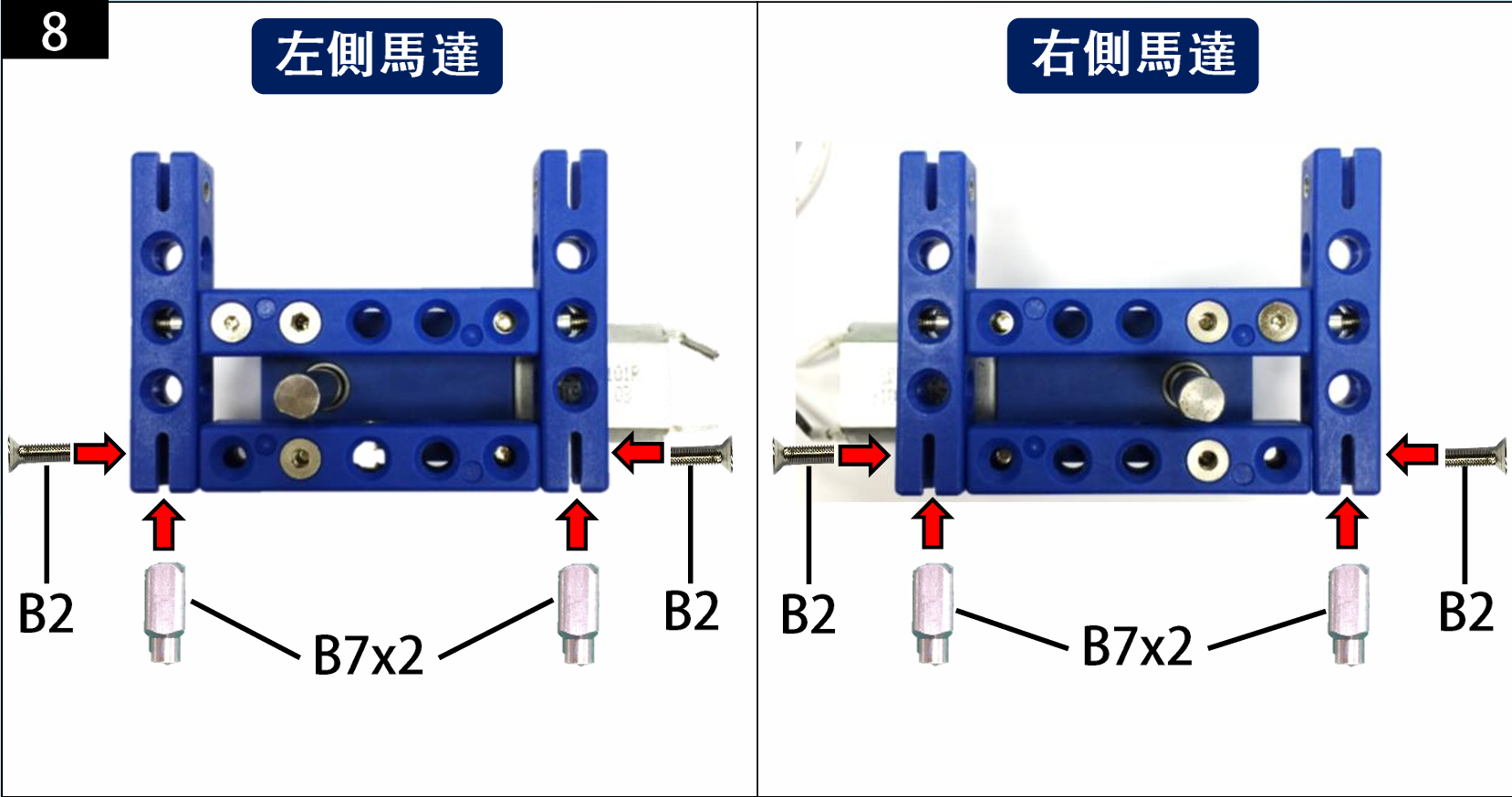
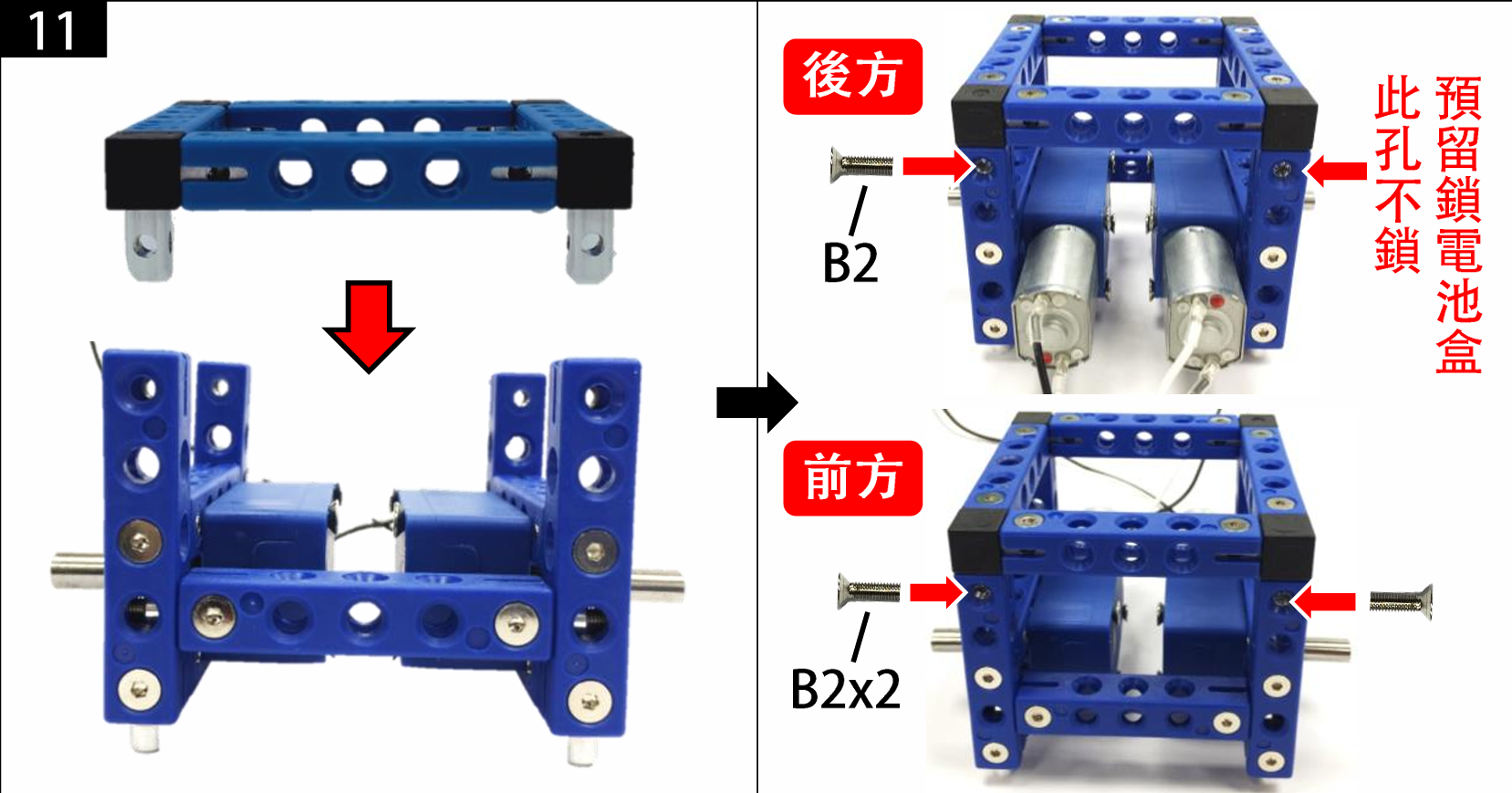
马达组装
-
左侧马达组装
-
右侧马达组装
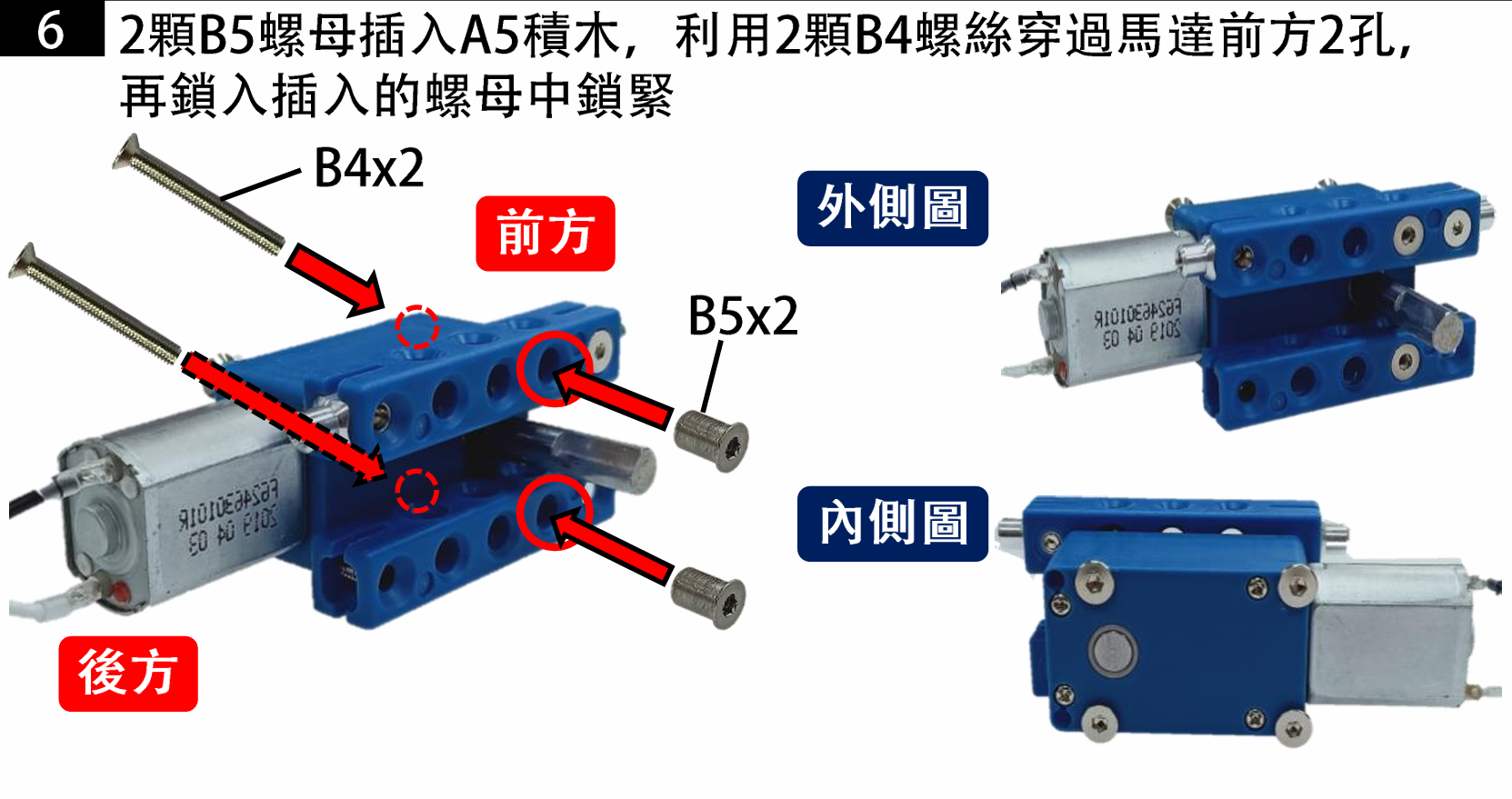
组装成功图如上
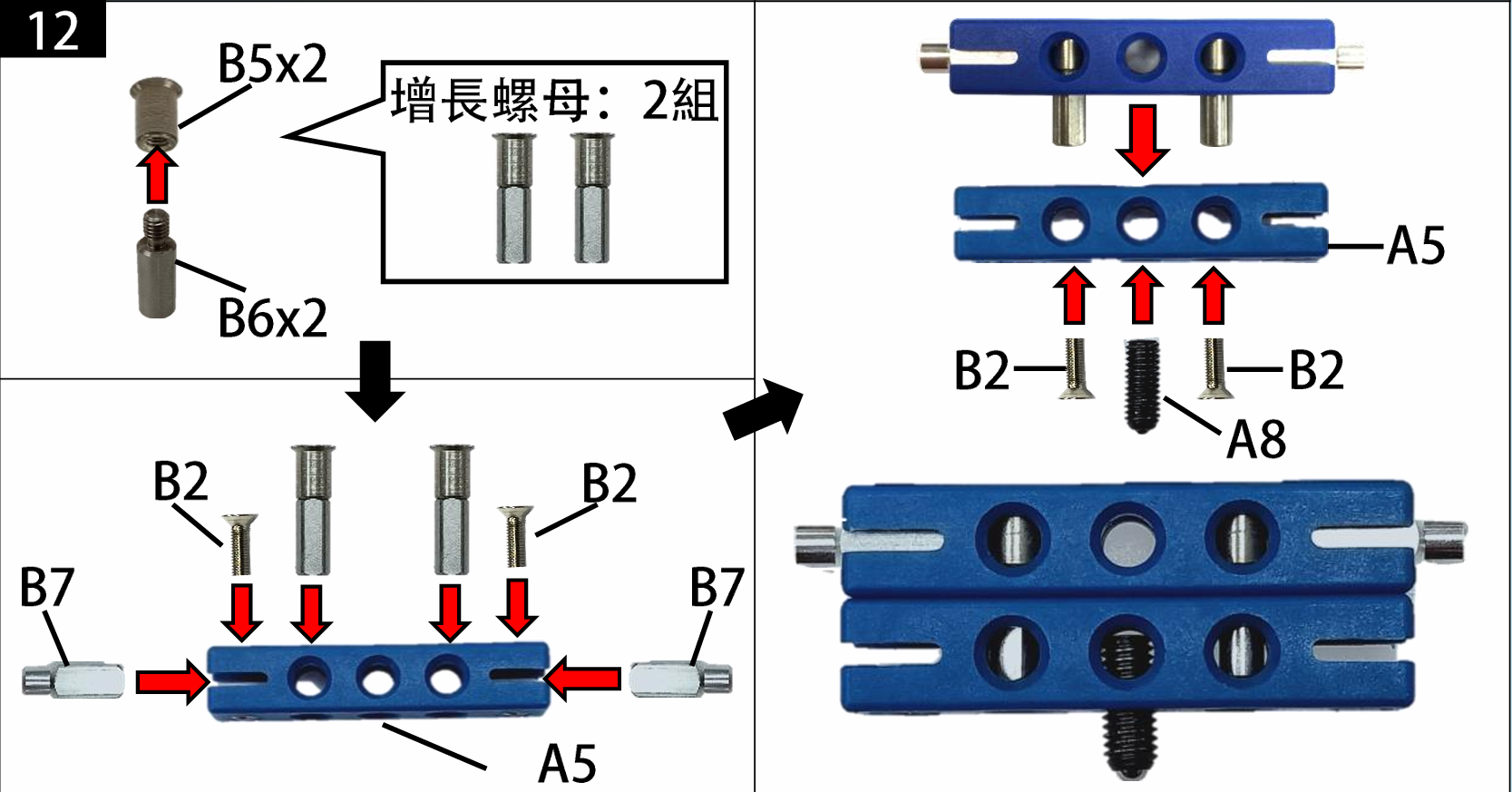
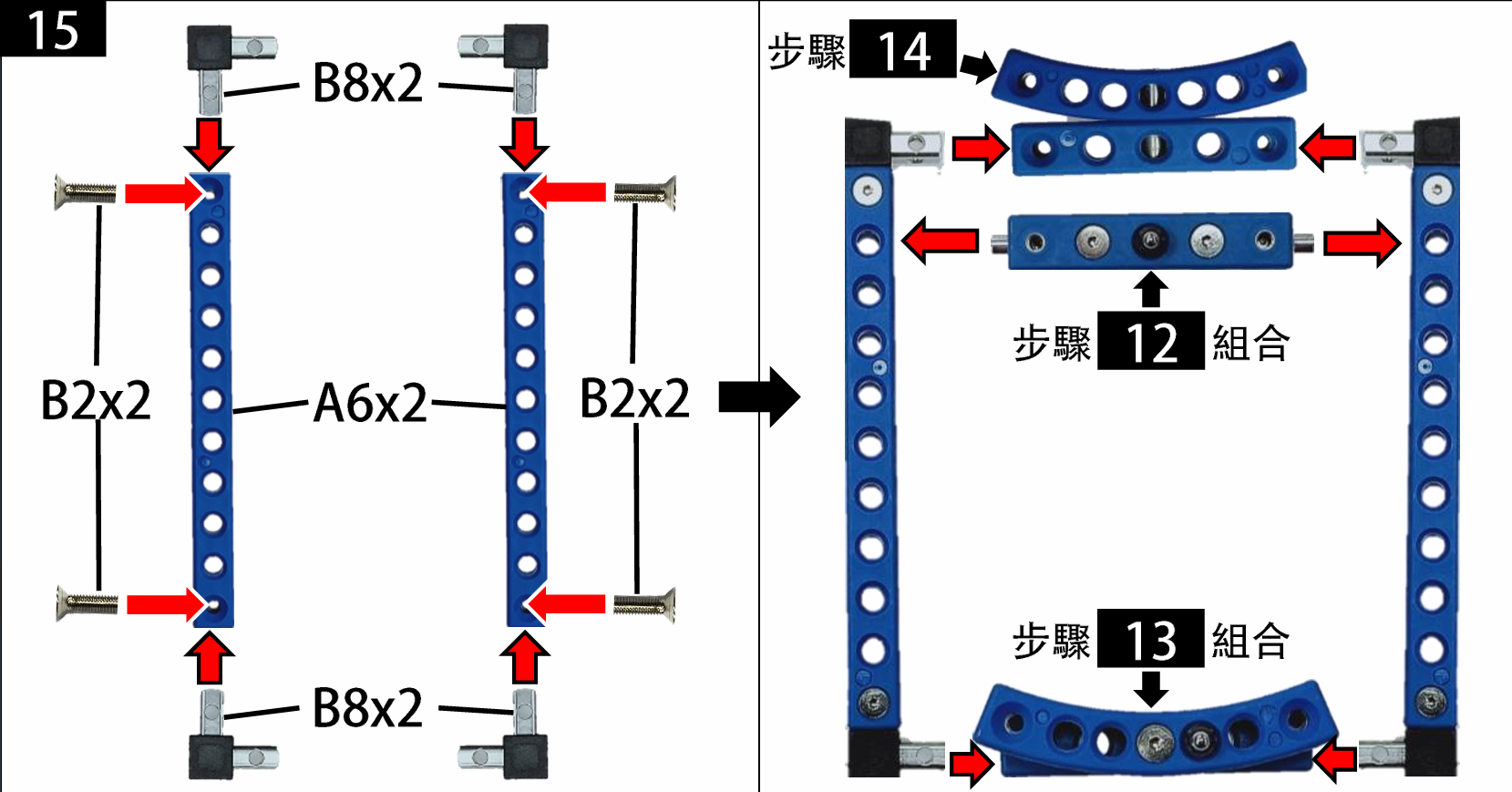
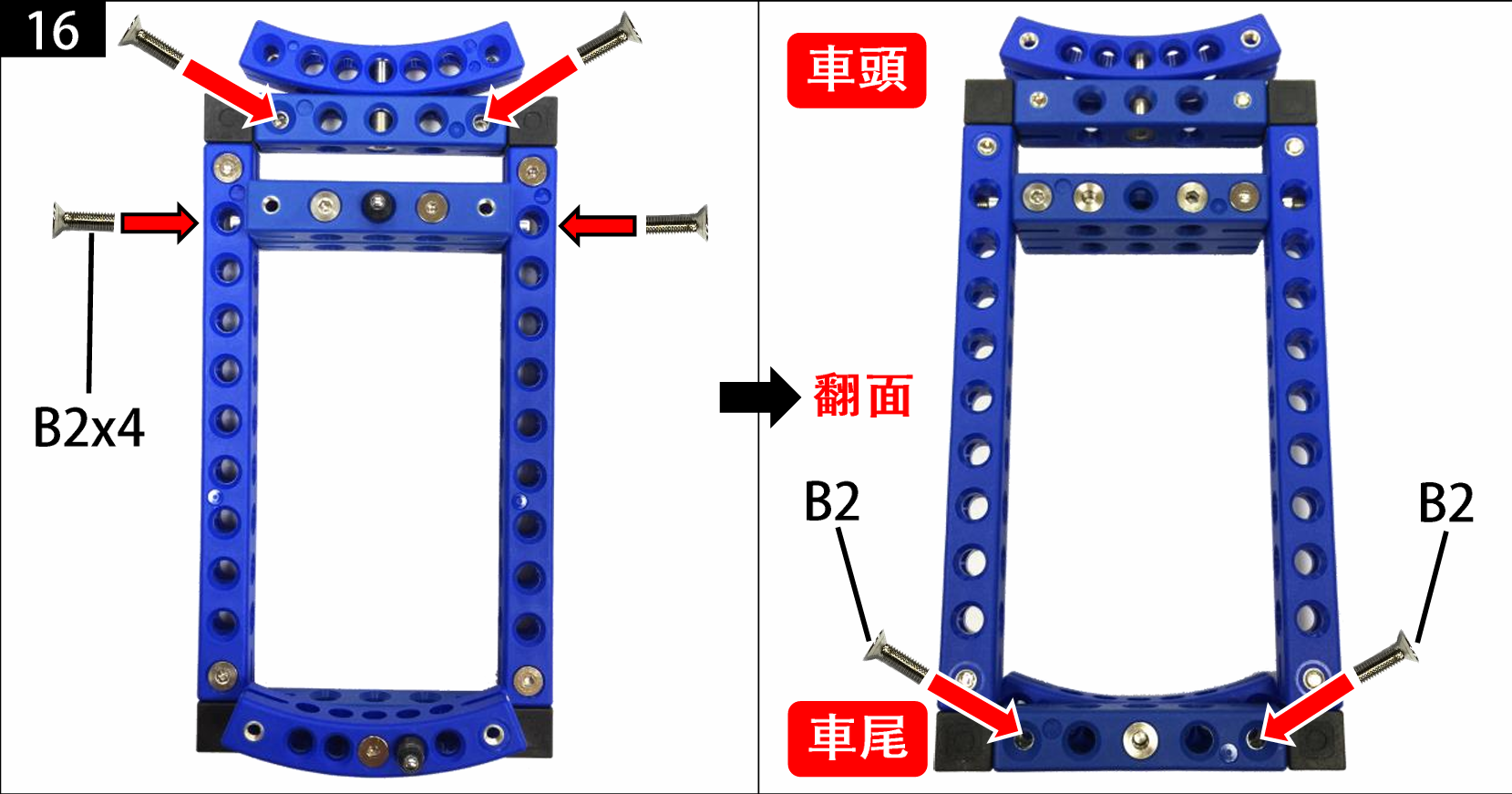
车身组装
-
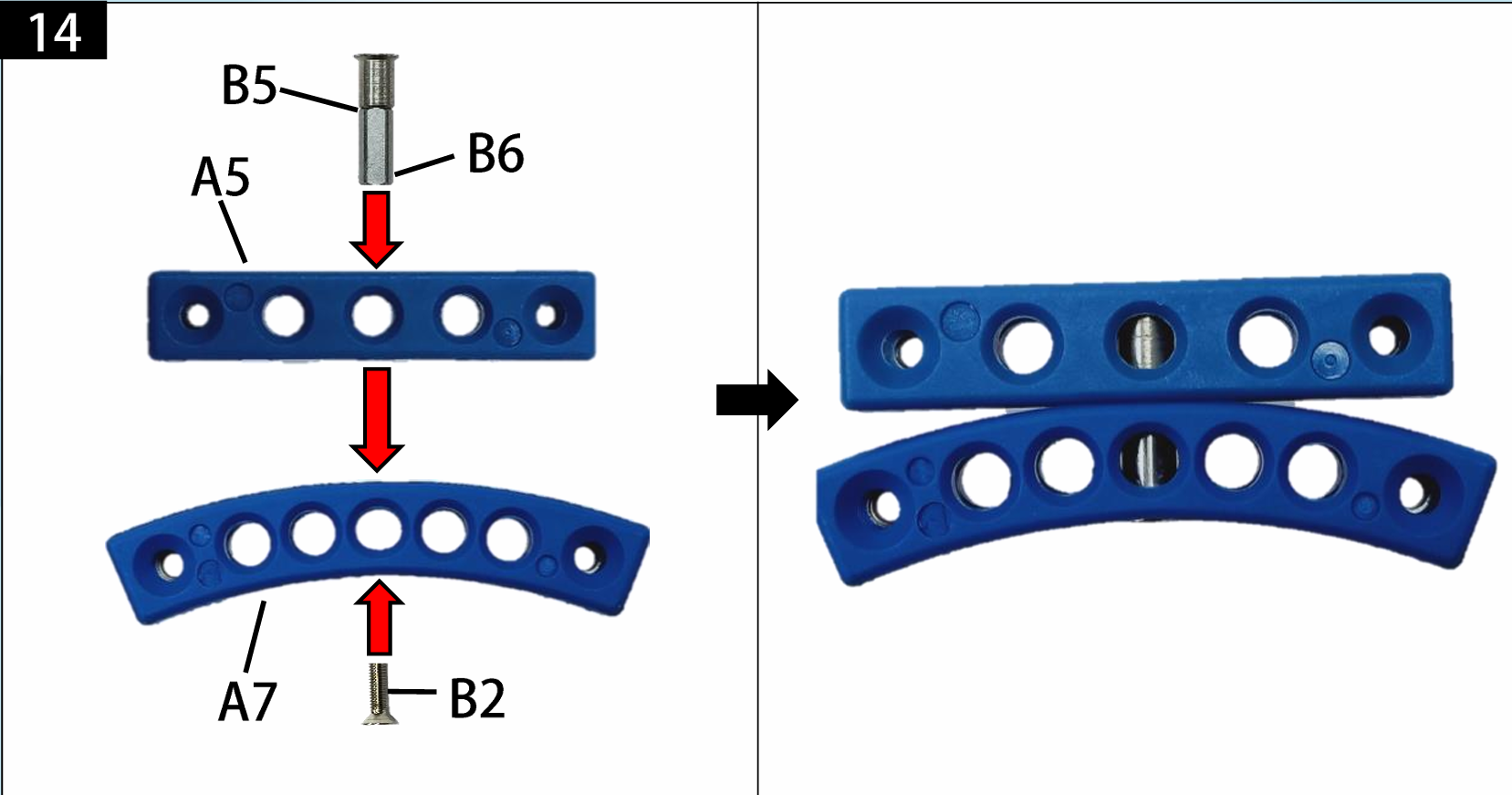
车体组装
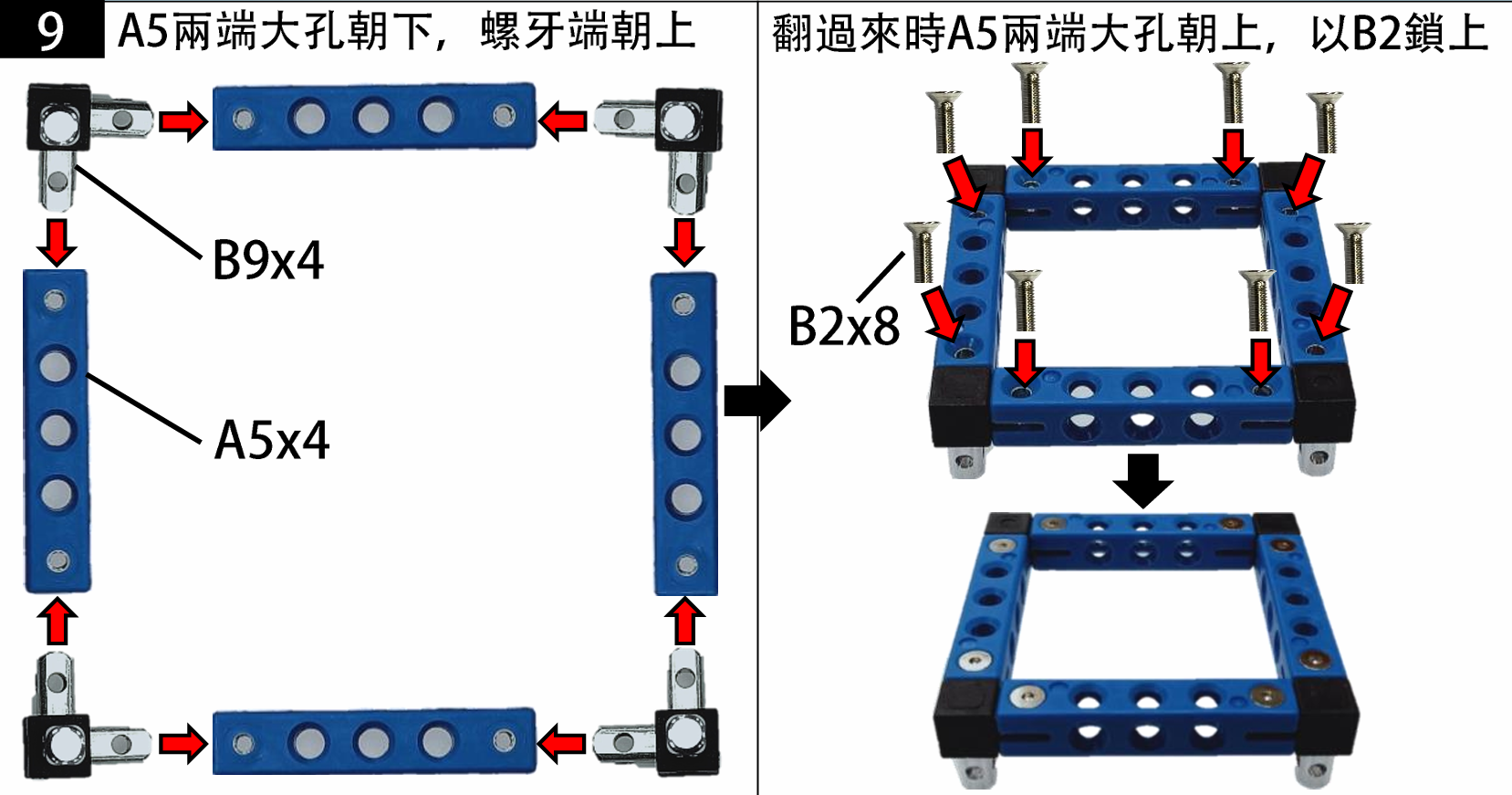
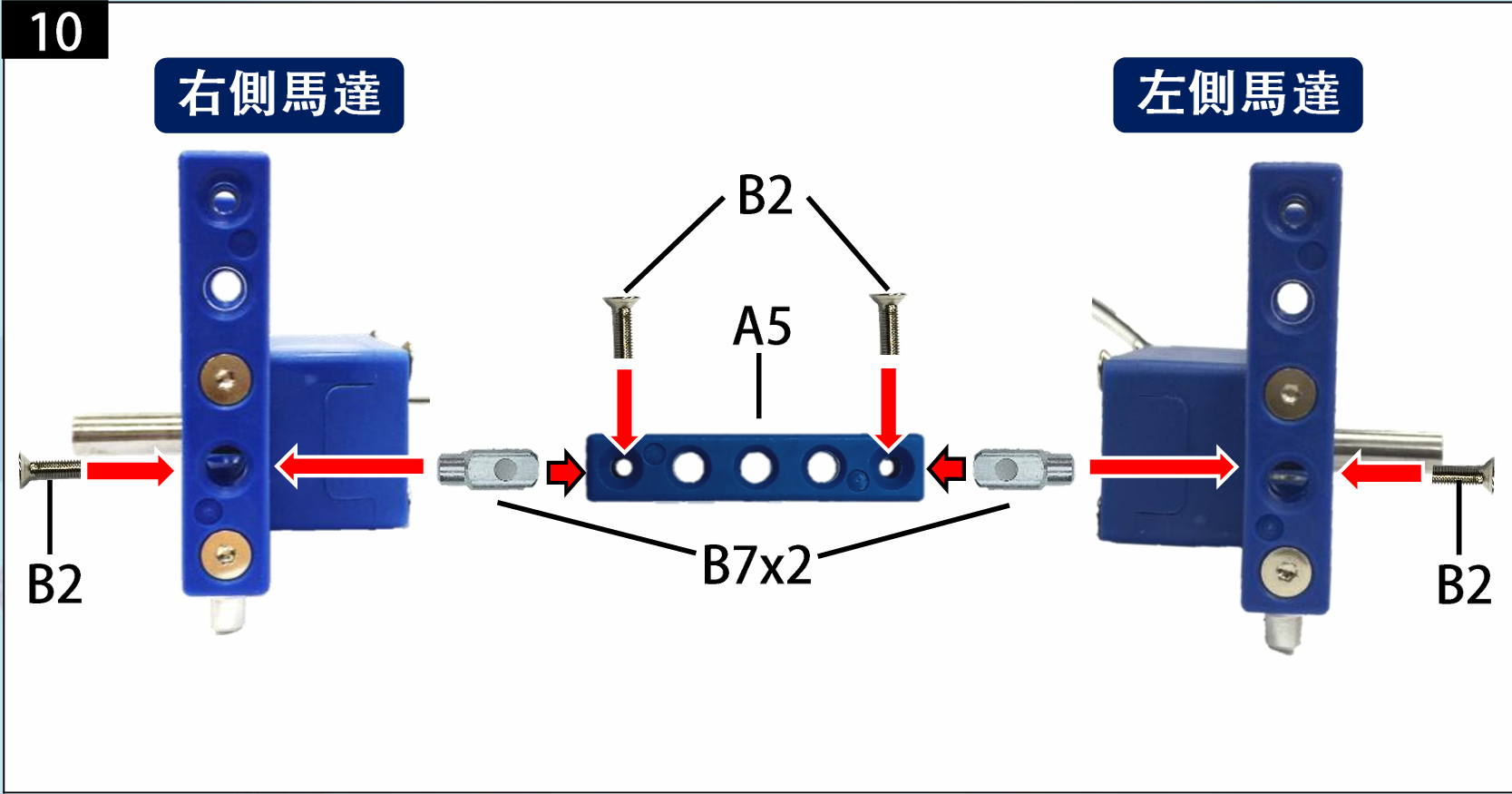
-
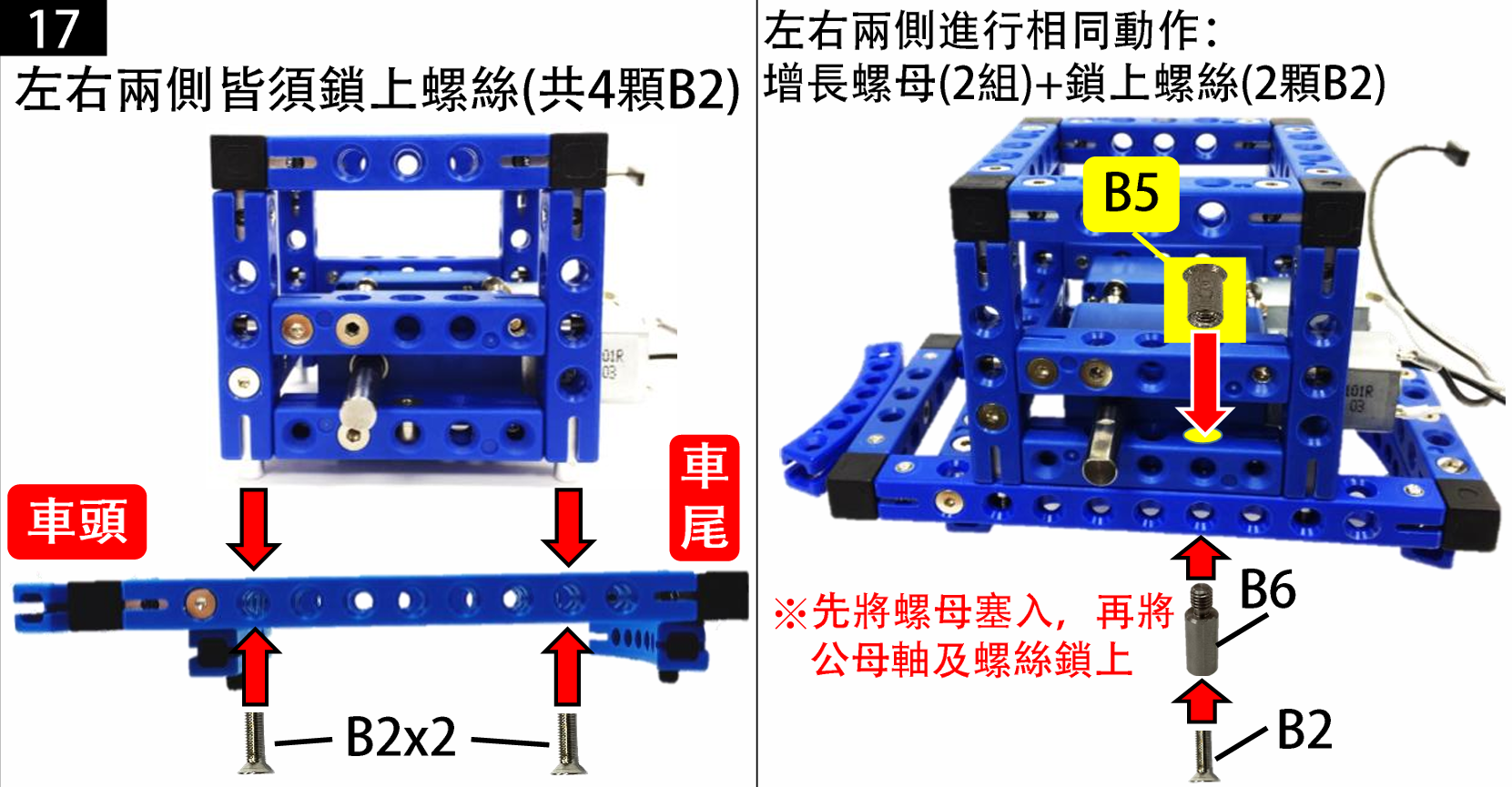
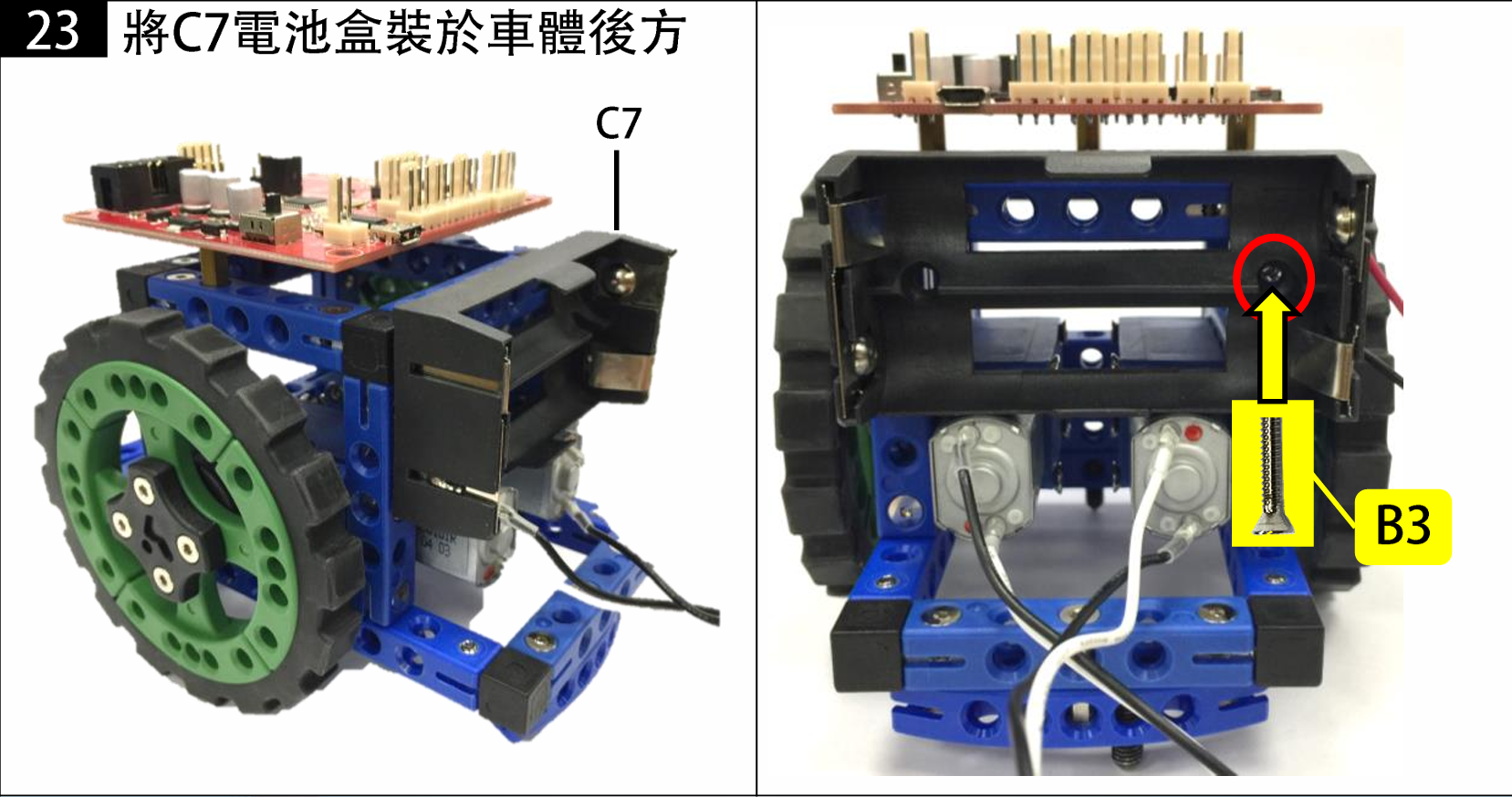
车底组装
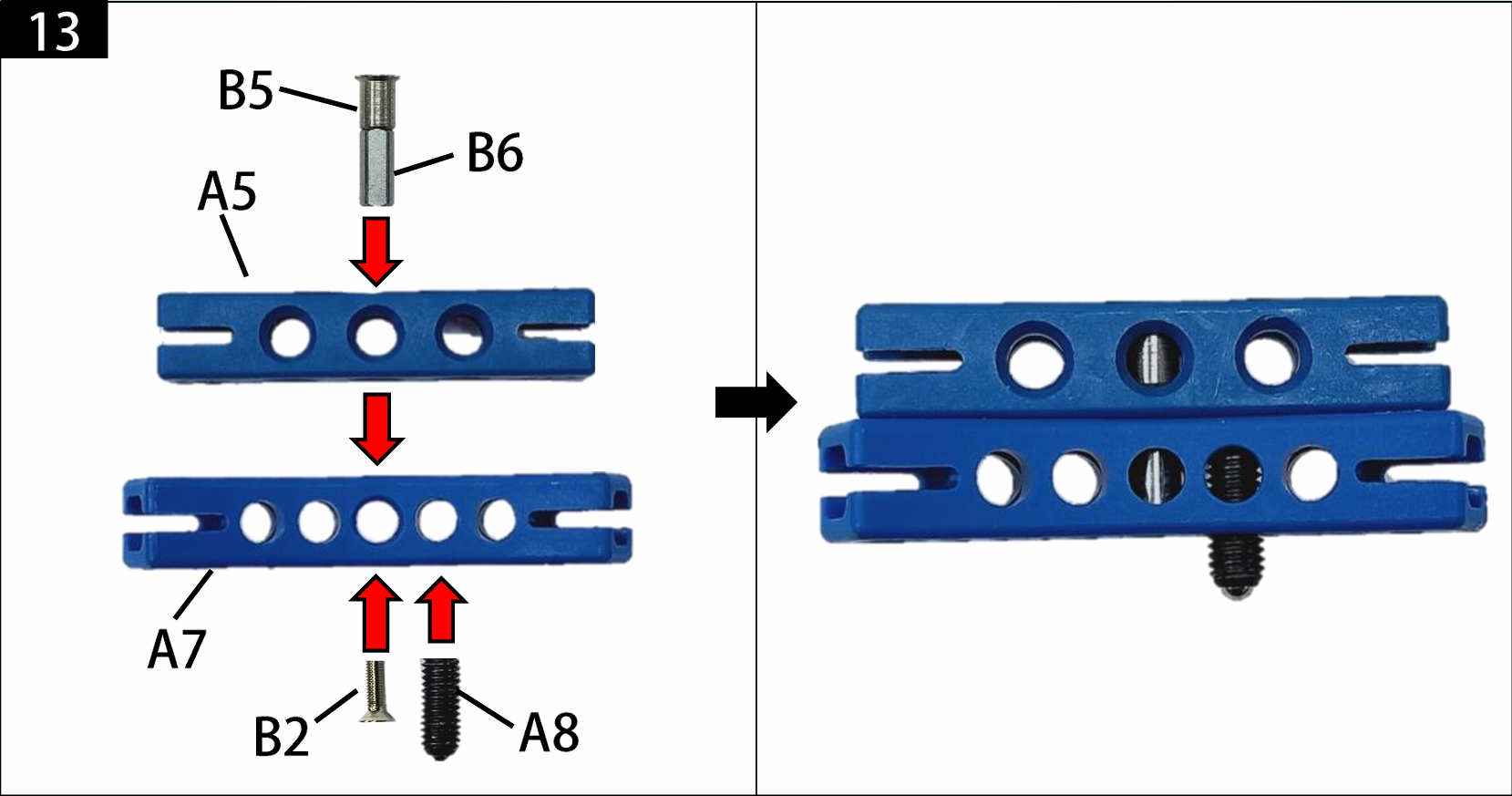
由于我们的车只有两个轮子,所以我们用到了两个A8对小车进行支撑
3.车轮组装
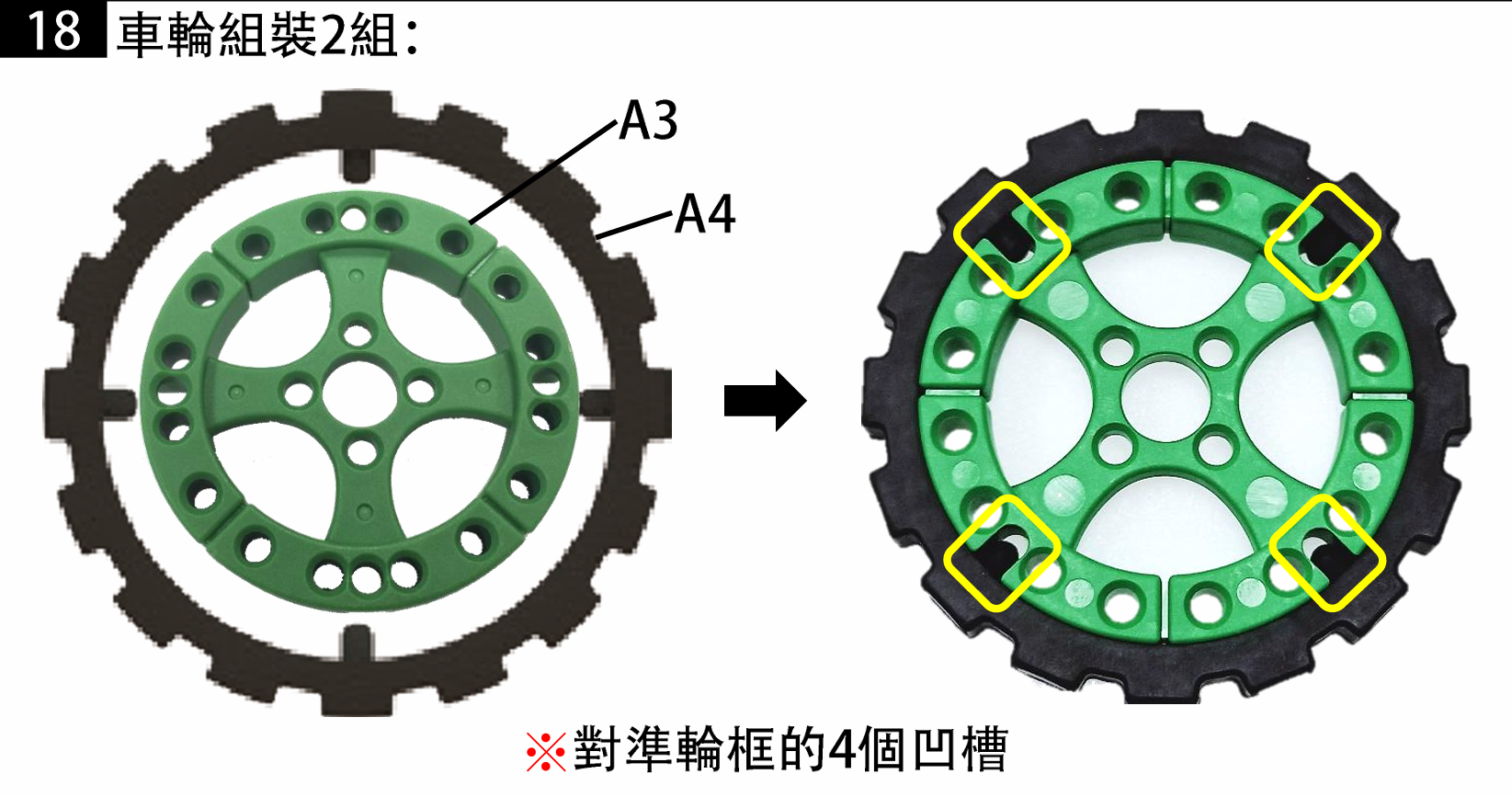
这个地方会有点紧,硬掰就可以
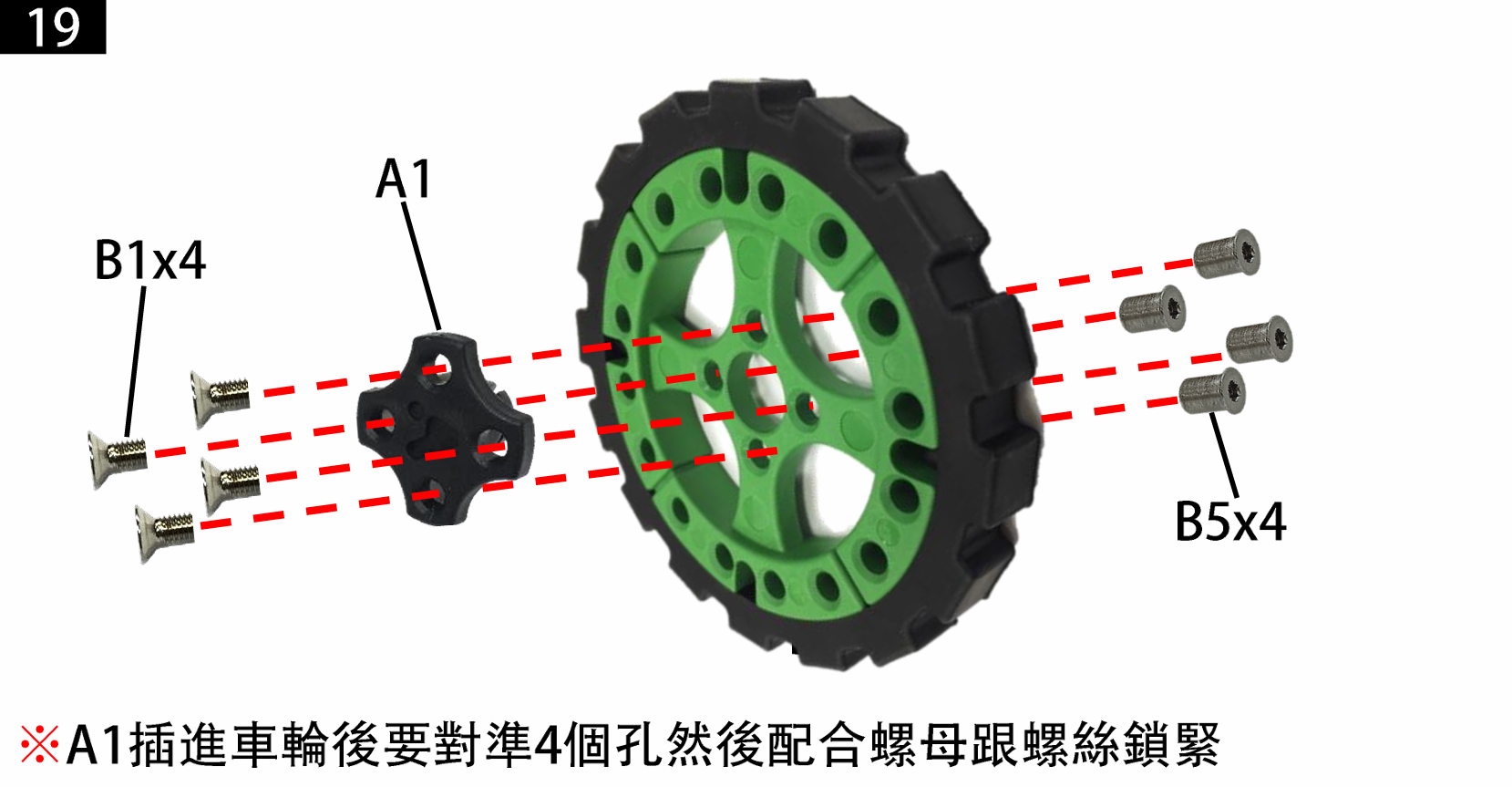
这个地方发螺丝一定要锁紧,小车的碰撞可能会导致送落
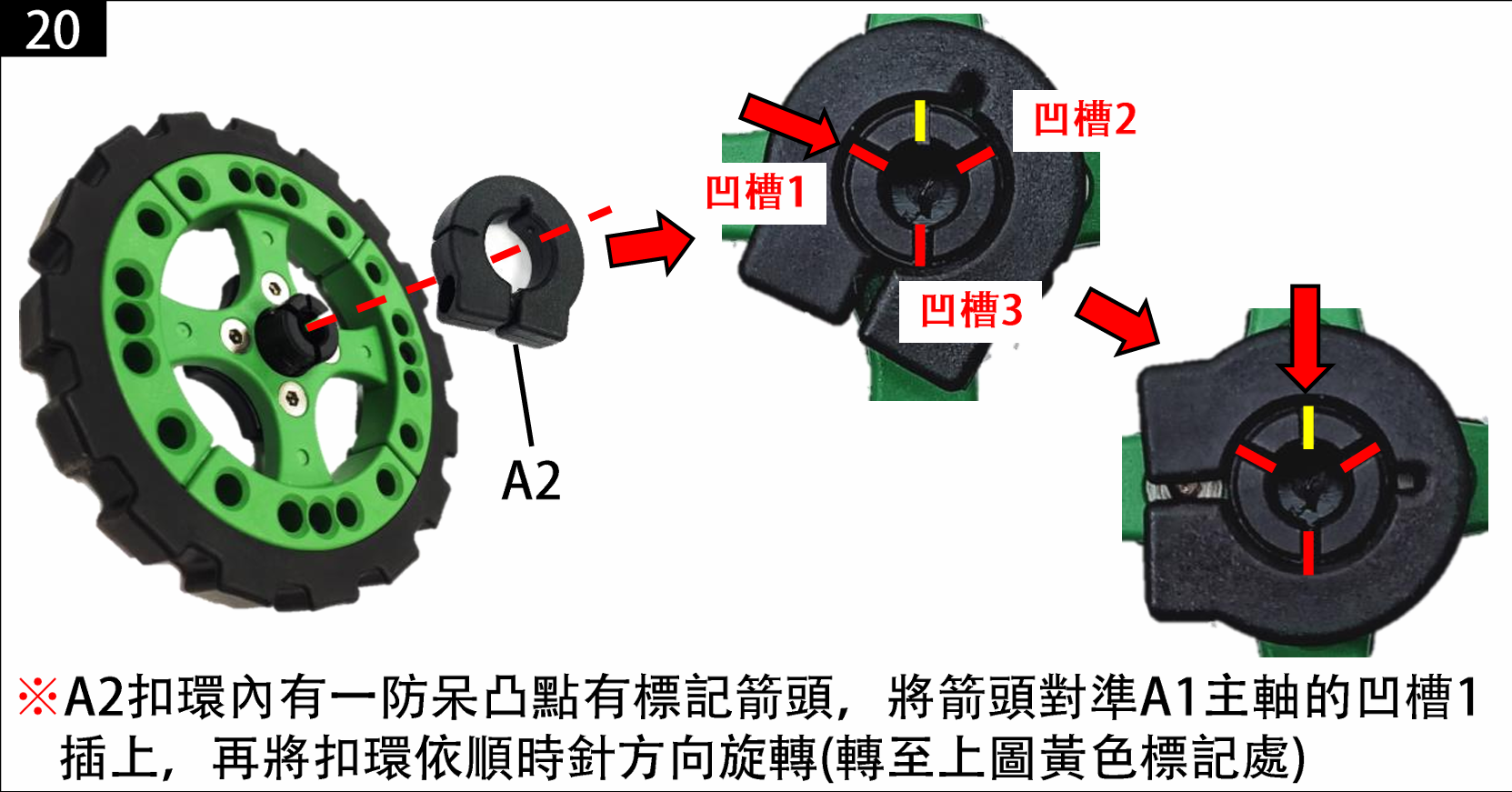
A2扣环内有一防呆凸点有标记箭头,将箭头A1主轴的凹槽1插上,再将扣环依顺时针方向旋转(转至上图黄色标记处)
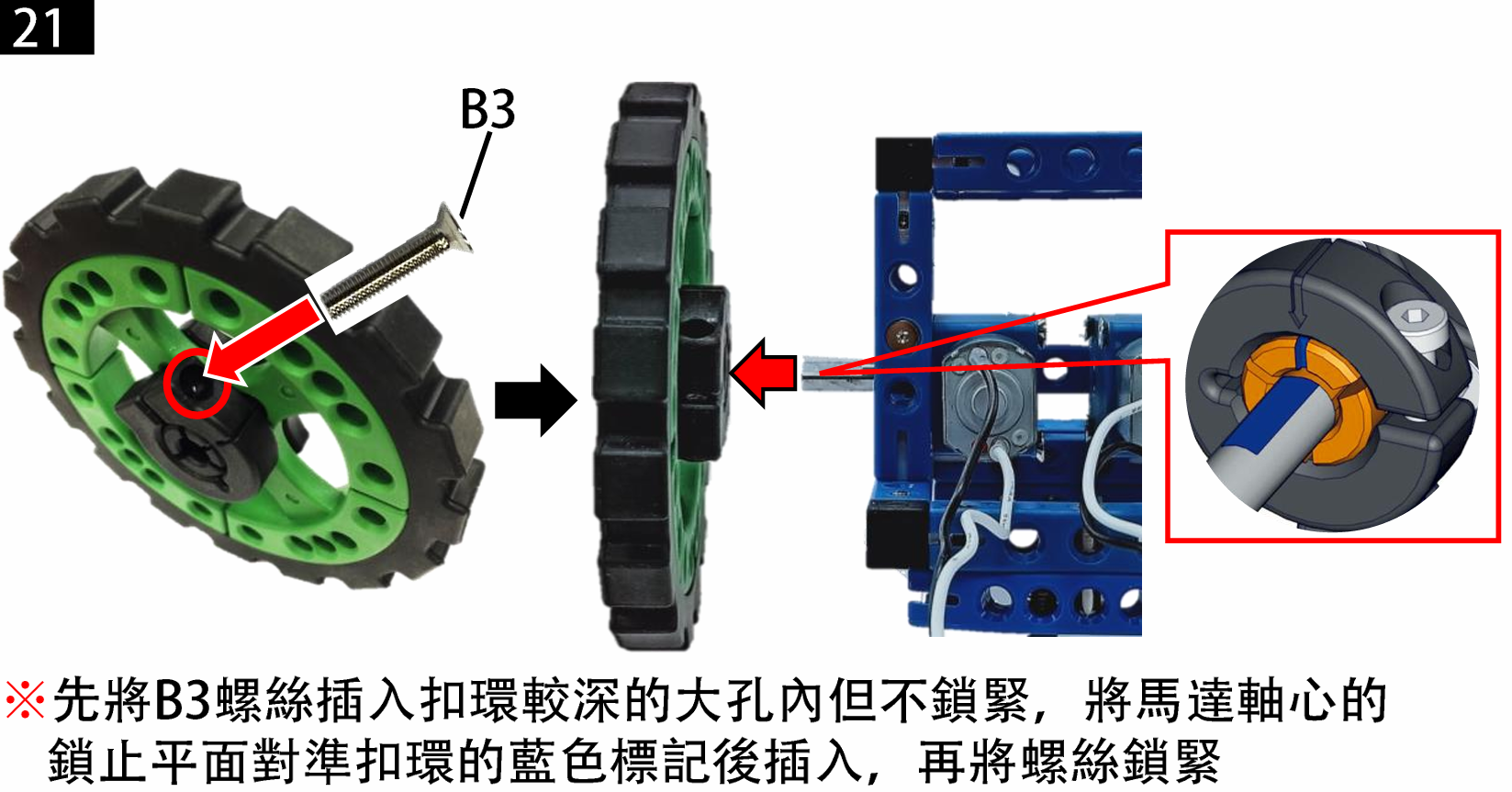
先将B3螺丝插入扣环较深的大孔内但不紧,将马达轴心的锁止平面对准扣环的蓝色标记后插入,再将螺丝锁紧
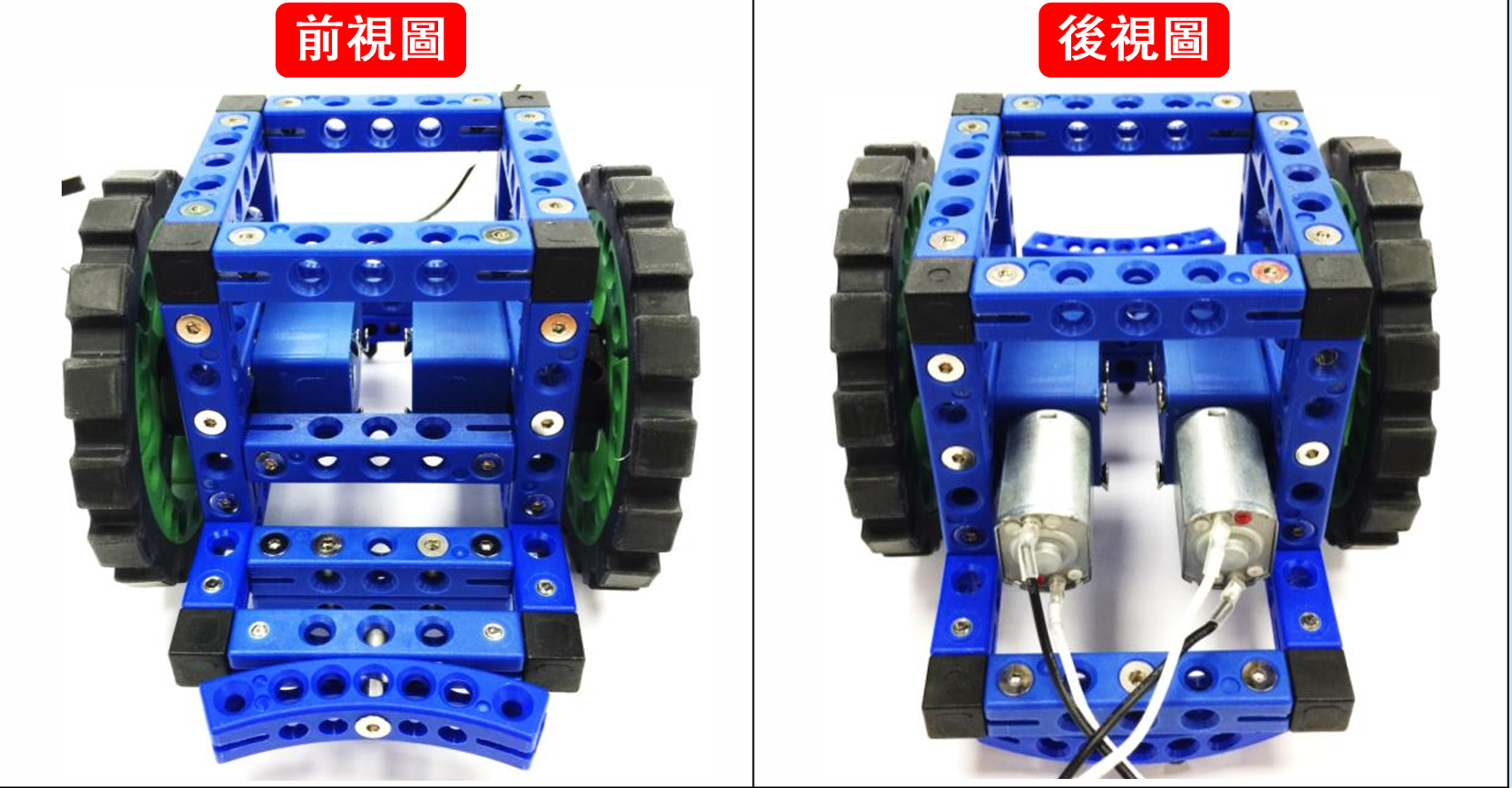
到现在组装成功后,成品如下
到这里,我们的机械模组部分就已经组装完成了,我们的主控电路部分可以自行安装,也可以按照下面的模板继续
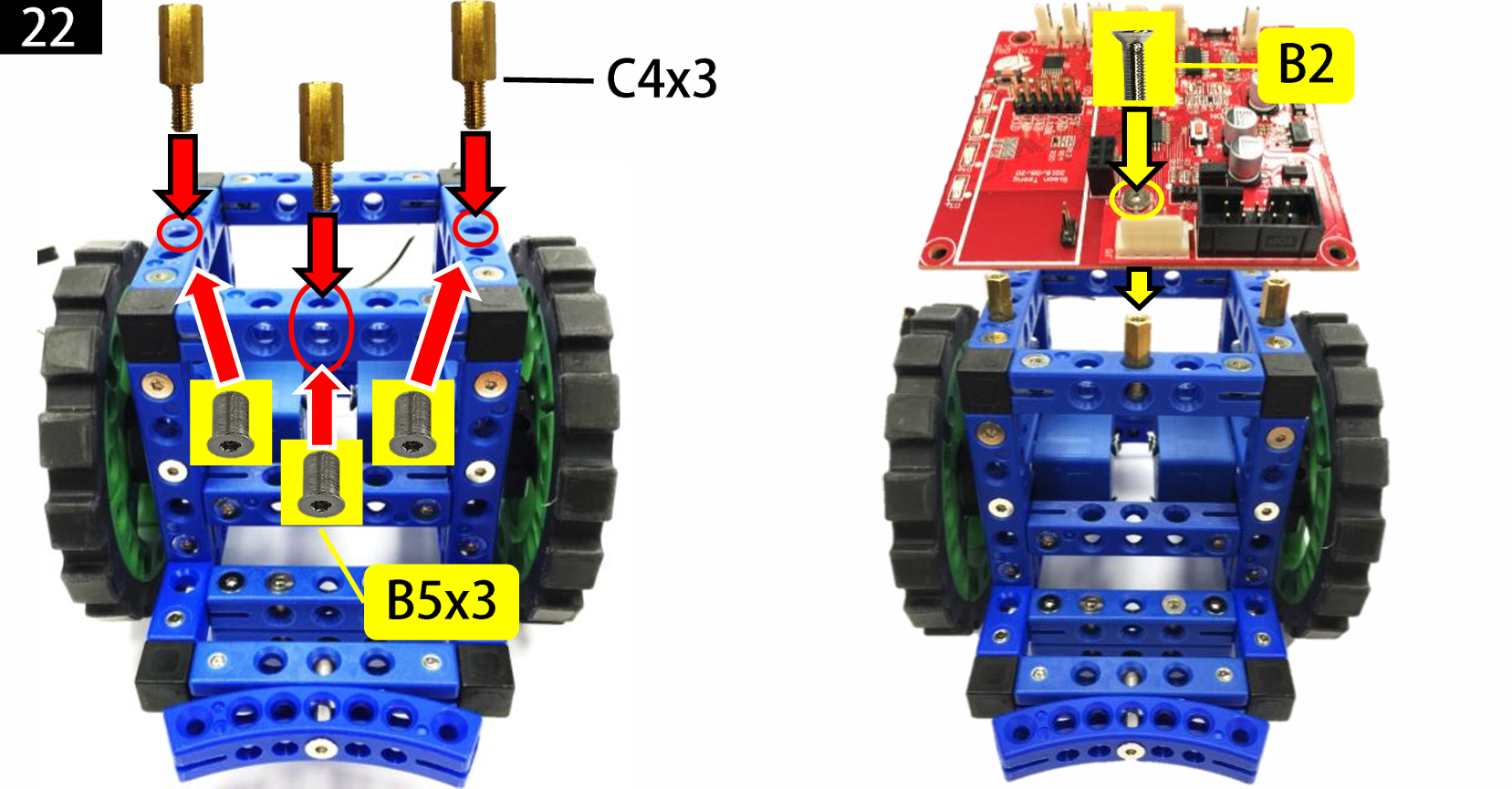
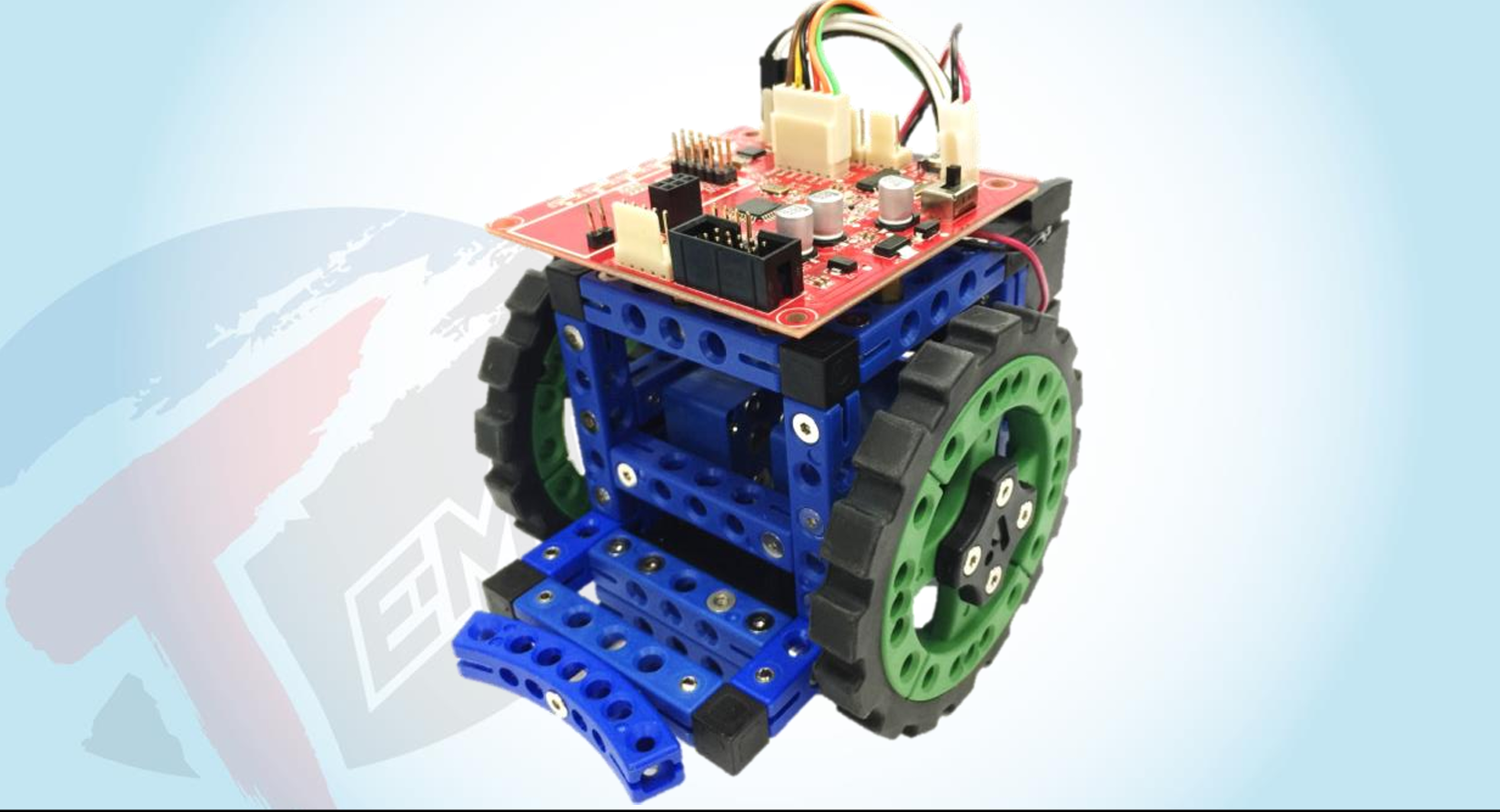
主控板安装
在主控板上面留出了几个大的过孔,可以穿过螺丝,我们就可以通过这几个过孔进行安装
下面是我们的完成示意图
到此为止,我们所有非编程部分的组装就结束了,其余的连线组装,我们到后面的程序设计时,我们再去看相应的连线
下一章我们给大家介绍我们的编程环境的配置