万物皆数:构建数字信号处理的数学基石
欢迎来到数字信号处理(DSP)的世界。在这里,声音、图像、通信信号、医疗数据......一切信息都被转化为一串串冰冷的数字。然而,正是通过对这些数字的精妙运算,我们得以实现去噪、滤波、压缩、识别等一系列神奇的操作。你是否曾好奇,这背后驱动一切的"魔法"究竟是什么?
答案既简单又深刻:数学。
DSP不是凭空产生的工程技巧,它是一座宏伟的建筑,而高等数学中的基本概念------极限、导数、积分、级数------正是构建这座大厦不可或缺的基石。许多初学者在学习DSP时,常常被Z变换、傅里叶变换等复杂的公式所困扰,感觉像是在记忆一堆天书。其根本原因,往往是未能看透这些变换背后所蕴含的、早已在高等数学课程中学过的核心思想。
这篇长文,将是你打通"任督二脉"的内功心法。我将不只是罗列公式,而是带你重走一遍数学思想的探索之路,让你亲眼见证:一个抽象的数学概念,是如何一步步演化为DSP中一个强大的分析工具。我们将从最基础的"逼近"思想开始,直到用"无穷"来构建整个频域分析的框架。
准备好了吗?让我们一起,用数学的钥匙,打开DSP世界的大门。
极限:从无穷到有限的桥梁
极限思想,是整个微积分乃至现代数学的基石。它探讨的是一个变量在变化过程中,无限"逼近"某个状态时的趋势和结果。在DSP中,极限思想帮助我们洞察信号与系统在"初始"、"终了"、"稳定"等临界状态下的特性,让我们无需陷入繁琐的计算,就能抓住问题的本质。
极限思想:逼近的艺术
回想一下高等数学中极限的定义:当变量 x x x 无限趋近于 x 0 x_0 x0 时,函数值 f ( x ) f(x) f(x) 无限趋近于一个确定的常数A,那么A就是函数 f ( x ) f(x) f(x) 在 x → x 0 x \to x_0 x→x0 时的极限。
这个思想的核心是**"无限逼近,但不一定达到"**。它为我们处理连续、变化、无穷等问题提供了一个严谨的框架。无论是导数的定义(自变量增量趋于0),还是积分的定义(分割宽度趋于0),其灵魂都是极限。
在DSP中,我们常常关心:
- 一个系统在启动的瞬间 ( n = 0 n=0 n=0)是什么状态?
- 一个系统运行了无穷久 之后( n → ∞ n \to \infty n→∞),会稳定在什么状态?
- 一个无穷序列的和,其最终结果是什么?
这些问题,都可以用极限这个强大的工具来回答。
DSP中的极限:洞察信号的始终
Z变换是分析离散系统的核心工具,而Z变换的两个重要性质------初值定理和终值定理,就是极限思想在DSP中的直接体现。
1. 初值定理 (Initial Value Theorem)
对于一个因果序列 x ( n ) x(n) x(n)(即 n < 0 n<0 n<0 时, x ( n ) = 0 x(n)=0 x(n)=0),其Z变换为 X ( z ) X(z) X(z),那么序列的初始值 x ( 0 ) x(0) x(0) 可以通过下面的极限求得:
x ( 0 ) = lim z → ∞ X ( z ) x(0) = \lim_{z \to \infty} X(z) x(0)=z→∞limX(z)
应用解读 :这个定理有什么用?想象一下,你设计了一个复杂的IIR滤波器,得到了它的系统函数 H ( z ) H(z) H(z)。现在你想知道这个滤波器在受到一个单位脉冲信号 δ ( n ) \delta(n) δ(n) 冲击的瞬间,其输出响应 h ( 0 ) h(0) h(0) 是多少。按照传统方法,你需要对 H ( z ) H(z) H(z) 进行复杂的逆Z变换,求出 h ( n ) h(n) h(n) 的通项公式,再把 n = 0 n=0 n=0 代入。而有了初值定理,你只需要对 H ( z ) H(z) H(z) 求一个当 z → ∞ z \to \infty z→∞ 时的极限,这个计算通常非常简单(往往只需要看分子分母最高次幂的系数),就能立刻得到 h ( 0 ) h(0) h(0)。它为我们打开了一扇"偷窥"系统初始状态的窗户。
2. 终值定理 (Final Value Theorem)
对于一个稳定的因果序列 x ( n ) x(n) x(n),其终值 x ( ∞ ) x(\infty) x(∞) 可以通过下面的极限求得:
x ( ∞ ) = lim n → ∞ x ( n ) = lim z → 1 ( 1 − z − 1 ) X ( z ) x(\infty) = \lim_{n \to \infty} x(n) = \lim_{z \to 1} (1 - z^{-1})X(z) x(∞)=n→∞limx(n)=z→1lim(1−z−1)X(z)
应用解读 :终值定理的威力在于预测系统的稳态响应 。例如,你设计了一个低通滤波器,想知道当输入是一个直流信号(单位阶跃序列 u ( n ) u(n) u(n))时,系统最终的直流增益是多少。单位阶跃的Z变换是 X ( z ) = 1 1 − z − 1 X(z) = \frac{1}{1-z^{-1}} X(z)=1−z−11。那么系统输出的Z变换 Y ( z ) = H ( z ) X ( z ) = H ( z ) 1 − z − 1 Y(z) = H(z)X(z) = \frac{H(z)}{1-z^{-1}} Y(z)=H(z)X(z)=1−z−1H(z)。根据终值定理,输出的稳态值就是:
y ( ∞ ) = lim z → 1 ( 1 − z − 1 ) Y ( z ) = lim z → 1 ( 1 − z − 1 ) H ( z ) 1 − z − 1 = lim z → 1 H ( z ) y(\infty) = \lim_{z \to 1} (1-z^{-1})Y(z) = \lim_{z \to 1} (1-z^{-1}) \frac{H(z)}{1-z^{-1}} = \lim_{z \to 1} H(z) y(∞)=z→1lim(1−z−1)Y(z)=z→1lim(1−z−1)1−z−1H(z)=z→1limH(z)
这个结果意义非凡:一个系统对直流信号的稳态响应,就等于其系统函数在 z = 1 z=1 z=1 处的取值 。而 z = 1 z=1 z=1 正好对应于数字频率 ω = 0 \omega=0 ω=0 的点。这完美地符合了我们对低通滤波器的直观理解。
重要前提 :终值定理的使用有一个严格的前提,那就是系统的所有极点(以及 ( 1 − z − 1 ) X ( z ) (1-z^{-1})X(z) (1−z−1)X(z) 的所有极点)都必须在单位圆内部,只有一个可能在 z = 1 z=1 z=1 处的单极点。这保证了系统是稳定的,其输出最终会收敛到一个有限的稳态值。如果系统不稳定(例如有一个极点在单位圆外),它的输出会趋于无穷,终值不存在,此时终值定理不适用。
极限练习场
高数热身 1
求极限 lim x → 2 x 2 − 4 x − 2 \lim_{x \to 2} \frac{x^2 - 4}{x - 2} limx→2x−2x2−4。
答案 :
lim x → 2 ( x − 2 ) ( x + 2 ) x − 2 = lim x → 2 ( x + 2 ) = 4 \lim_{x \to 2} \frac{(x-2)(x+2)}{x - 2} = \lim_{x \to 2} (x+2) = 4 x→2limx−2(x−2)(x+2)=x→2lim(x+2)=4
高数热身 2
求极限 lim x → ∞ 3 x 2 + 2 x − 5 2 x 2 − x + 1 \lim_{x \to \infty} \frac{3x^2 + 2x - 5}{2x^2 - x + 1} limx→∞2x2−x+13x2+2x−5。
答案 :分子分母同除以 x 2 x^2 x2:
lim x → ∞ 3 + 2 / x − 5 / x 2 2 − 1 / x + 1 / x 2 = 3 + 0 − 0 2 − 0 + 0 = 3 2 \lim_{x \to \infty} \frac{3 + 2/x - 5/x^2}{2 - 1/x + 1/x^2} = \frac{3+0-0}{2-0+0} = \frac{3}{2} x→∞lim2−1/x+1/x23+2/x−5/x2=2−0+03+0−0=23
高数热身 3
求极限 lim x → 0 sin ( k x ) x \lim_{x \to 0} \frac{\sin(kx)}{x} limx→0xsin(kx)。
答案 :利用重要极限 lim u → 0 sin u u = 1 \lim_{u \to 0} \frac{\sin u}{u} = 1 limu→0usinu=1:
lim x → 0 k sin ( k x ) k x = k ⋅ lim k x → 0 sin ( k x ) k x = k ⋅ 1 = k \lim_{x \to 0} \frac{k \sin(kx)}{kx} = k \cdot \lim_{kx \to 0} \frac{\sin(kx)}{kx} = k \cdot 1 = k x→0limkxksin(kx)=k⋅kx→0limkxsin(kx)=k⋅1=k
DSP实战 1 (初值定理)
一个因果LTI系统的系统函数为 H ( z ) = z 2 + 2 z z 2 − 0.9 z + 0.81 H(z) = \frac{z^2 + 2z}{z^2 - 0.9z + 0.81} H(z)=z2−0.9z+0.81z2+2z。求该系统的单位脉冲响应 h ( n ) h(n) h(n) 的初始值 h ( 0 ) h(0) h(0)。
答案 :根据初值定理, h ( n ) h(n) h(n) 的Z变换就是 H ( z ) H(z) H(z)。
h ( 0 ) = lim z → ∞ H ( z ) = lim z → ∞ z 2 + 2 z z 2 − 0.9 z + 0.81 h(0) = \lim_{z \to \infty} H(z) = \lim_{z \to \infty} \frac{z^2 + 2z}{z^2 - 0.9z + 0.81} h(0)=z→∞limH(z)=z→∞limz2−0.9z+0.81z2+2z
分子分母同除以 z 2 z^2 z2:
h ( 0 ) = lim z → ∞ 1 + 2 / z 1 − 0.9 / z + 0.81 / z 2 = 1 + 0 1 − 0 + 0 = 1 h(0) = \lim_{z \to \infty} \frac{1 + 2/z}{1 - 0.9/z + 0.81/z^2} = \frac{1+0}{1-0+0} = 1 h(0)=z→∞lim1−0.9/z+0.81/z21+2/z=1−0+01+0=1
DSP实战 2 (终值定理)
一个稳定的因果LTI系统的系统函数为 H ( z ) = 0.5 ( 1 + z − 1 ) 1 − 0.5 z − 1 H(z) = \frac{0.5(1+z^{-1})}{1 - 0.5z^{-1}} H(z)=1−0.5z−10.5(1+z−1)。当输入为单位阶跃序列 u ( n ) u(n) u(n) 时,求输出 y ( n ) y(n) y(n) 的稳态值 y ( ∞ ) y(\infty) y(∞)。
答案 :输入 x ( n ) = u ( n ) x(n)=u(n) x(n)=u(n),其Z变换为 X ( z ) = 1 1 − z − 1 X(z) = \frac{1}{1-z^{-1}} X(z)=1−z−11。输出 Y ( z ) = H ( z ) X ( z ) Y(z) = H(z)X(z) Y(z)=H(z)X(z)。根据终值定理:
y ( ∞ ) = lim z → 1 ( 1 − z − 1 ) Y ( z ) = lim z → 1 H ( z ) y(\infty) = \lim_{z \to 1} (1-z^{-1})Y(z) = \lim_{z \to 1} H(z) y(∞)=z→1lim(1−z−1)Y(z)=z→1limH(z)
y ( ∞ ) = lim z → 1 0.5 ( 1 + z − 1 ) 1 − 0.5 z − 1 = 0.5 ( 1 + 1 ) 1 − 0.5 ( 1 ) = 0.5 × 2 0.5 = 2 y(\infty) = \lim_{z \to 1} \frac{0.5(1+z^{-1})}{1 - 0.5z^{-1}} = \frac{0.5(1+1)}{1 - 0.5(1)} = \frac{0.5 \times 2}{0.5} = 2 y(∞)=z→1lim1−0.5z−10.5(1+z−1)=1−0.5(1)0.5(1+1)=0.50.5×2=2
DSP实战 3 (概念辨析)
一个系统函数为 H ( z ) = 1 1 − 2 z − 1 H(z) = \frac{1}{1 - 2z^{-1}} H(z)=1−2z−11,该系统是否能使用终值定理?为什么?
答案 :不能。该系统的极点在 p = 2 p = 2 p=2,位于单位圆外部。系统是不稳定的,其脉冲响应 h ( n ) = 2 n u ( n ) h(n) = 2^n u(n) h(n)=2nu(n) 会趋于无穷,不存在有限的稳态值,因此终值定理不适用。如果强行套用公式会得到 lim z → 1 H ( z ) = 1 1 − 2 = − 1 \lim_{z \to 1} H(z) = \frac{1}{1-2} = -1 limz→1H(z)=1−21=−1,这是一个错误的结论。
导数:捕捉变化的瞬间
如果说极限是研究"趋势",那么导数就是研究"变化的快慢"。导数的本质是瞬时变化率,它为我们提供了一个描述和分析函数局部特性的强大数学工具。在DSP中,导数的思想被巧妙地用来定义滤波器的频域特性,以及建立时域与频域之间更深层次的联系。
导数思想:变化率的量度
导数的几何意义是函数曲线上某点切线的斜率。斜率越大,代表函数在该点变化得越剧烈;斜率为零,则代表函数在该点处于一个"平坦"的极值点。这个看似简单的几何概念,是优化、寻峰、特性分析等无数应用的基础。
DSP中的导数:频域的精细雕刻
1. Z变换的微分性质
Z变换有一条非常有趣的性质,它将时域的"加权"操作与Z域的"微分"操作联系了起来:
n x ( n ) ⟷ − z d X ( z ) d z n x(n) \longleftrightarrow -z \frac{dX(z)}{dz} nx(n)⟷−zdzdX(z)
应用解读 :这个性质有什么用?一方面,它为我们计算某些特殊序列的Z变换提供了捷径。例如,我们知道单位阶跃 u ( n ) u(n) u(n) 的Z变换是 z z − 1 \frac{z}{z-1} z−1z,那么斜坡序列 n u ( n ) n u(n) nu(n) 的Z变换就可以通过对 z z − 1 \frac{z}{z-1} z−1z 求导再乘以 − z -z −z 来得到。另一方面,它揭示了一种深刻的对偶性:在时域对信号进行线性加权(越往后权重越大),等效于在Z域对其变换函数进行微分。这种对偶思想在更高级的信号处理理论中会反复出现。
2. 模拟滤波器设计中的应用
数字IIR滤波器的设计,通常是借鉴成熟的模拟滤波器设计。而模拟滤波器的特性,就是用导数来定义的。
以最著名的巴特沃斯(Butterworth)低通滤波器 为例,它的一个核心特性叫做**"最大平坦(Maximally Flat)"。这是什么意思呢?它的幅度平方响应函数 ∣ H a ( j Ω ) ∣ 2 |H_a(j\Omega)|^2 ∣Ha(jΩ)∣2 在通带中心频率 Ω = 0 \Omega=0 Ω=0 处,不仅函数值是我们想要的(比如1),而且它的一阶、二阶、三阶......直到 ( 2 N − 1 ) (2N-1) (2N−1) 阶导数,在 Ω = 0 \Omega=0 Ω=0 这一点全都是零**!
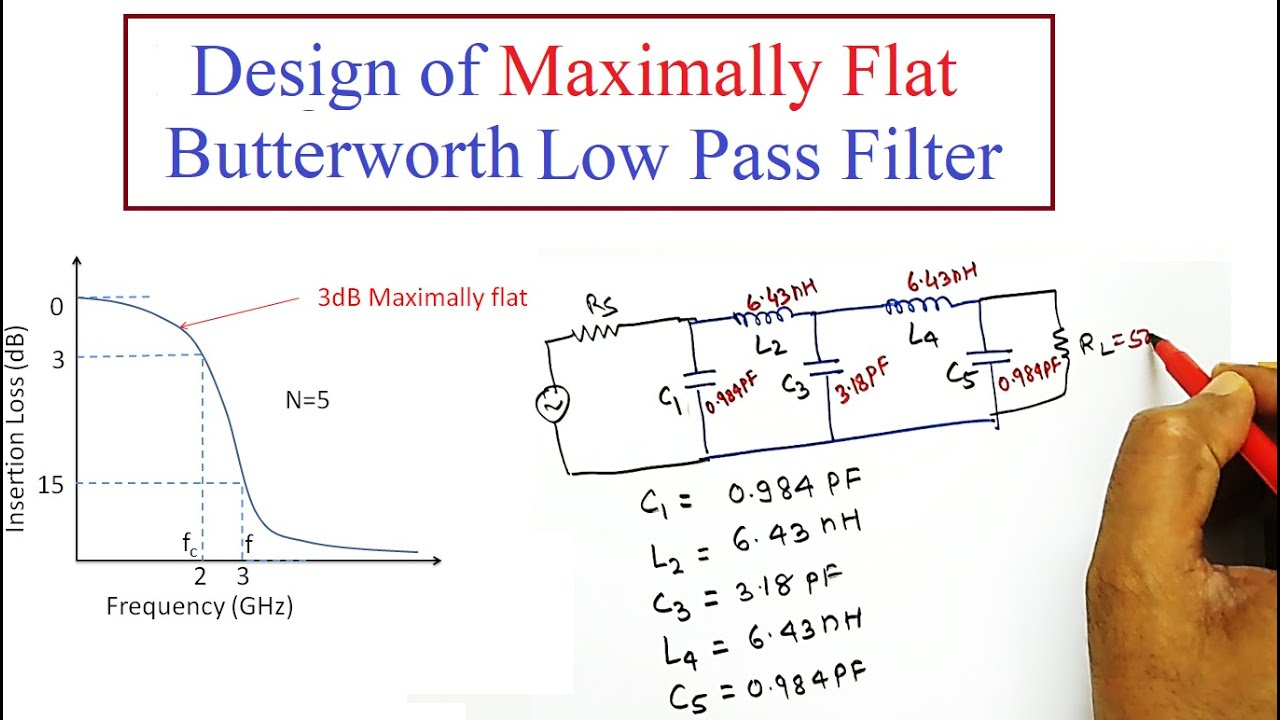
从导数的角度看,这意味着巴特沃斯滤波器的通带响应曲线在中心点附近是"平坦到极致的"。它牺牲了过渡带的陡峭性,来换取通带内最完美、最无失真的幅度响应。理解了导数与函数平坦性的关系,你就能瞬间明白巴特沃斯滤波器的设计哲学。
同样,切比雪夫(Chebyshev)滤波器的"等波纹"特性,也是通过寻找一系列导数为零的极值点来实现的。
导数练习场
高数热身 1
求函数 f ( x ) = 3 x 4 − 5 x 2 + 7 x − 1 f(x) = 3x^4 - 5x^2 + 7x - 1 f(x)=3x4−5x2+7x−1 的导数 f ′ ( x ) f'(x) f′(x)。
答案 :
f ′ ( x ) = 12 x 3 − 10 x + 7 f'(x) = 12x^3 - 10x + 7 f′(x)=12x3−10x+7
高数热身 2
求函数 f ( x ) = x 2 sin ( x ) f(x) = x^2 \sin(x) f(x)=x2sin(x) 的导数 f ′ ( x ) f'(x) f′(x)。
答案 :利用乘法法则 ( u v ) ′ = u ′ v + u v ′ (uv)' = u'v + uv' (uv)′=u′v+uv′:
f ′ ( x ) = ( 2 x ) sin ( x ) + x 2 cos ( x ) f'(x) = (2x)\sin(x) + x^2\cos(x) f′(x)=(2x)sin(x)+x2cos(x)
高数热身 3
求函数 f ( x ) = e x x f(x) = \frac{e^x}{x} f(x)=xex 的导数 f ′ ( x ) f'(x) f′(x)。
答案 :利用除法法则 ( u v ) ′ = u ′ v − u v ′ v 2 (\frac{u}{v})' = \frac{u'v - uv'}{v^2} (vu)′=v2u′v−uv′:
f ′ ( x ) = ( e x ) x − e x ( 1 ) x 2 = e x ( x − 1 ) x 2 f'(x) = \frac{(e^x)x - e^x(1)}{x^2} = \frac{e^x(x-1)}{x^2} f′(x)=x2(ex)x−ex(1)=x2ex(x−1)
DSP实战 1 (Z变换微分性质)
已知序列 x ( n ) = a n u ( n ) x(n) = a^n u(n) x(n)=anu(n) 的Z变换为 X ( z ) = z z − a X(z) = \frac{z}{z-a} X(z)=z−az。求序列 y ( n ) = n a n u ( n ) y(n) = n a^n u(n) y(n)=nanu(n) 的Z变换 Y ( z ) Y(z) Y(z)。
答案 :根据微分性质, Y ( z ) = − z d X ( z ) d z Y(z) = -z \frac{dX(z)}{dz} Y(z)=−zdzdX(z)。
首先求导:
d X ( z ) d z = ( 1 ) ( z − a ) − z ( 1 ) ( z − a ) 2 = − a ( z − a ) 2 \frac{dX(z)}{dz} = \frac{(1)(z-a) - z(1)}{(z-a)^2} = \frac{-a}{(z-a)^2} dzdX(z)=(z−a)2(1)(z−a)−z(1)=(z−a)2−a
然后乘以 − z -z −z:
Y ( z ) = − z ( − a ( z − a ) 2 ) = a z ( z − a ) 2 Y(z) = -z \left( \frac{-a}{(z-a)^2} \right) = \frac{az}{(z-a)^2} Y(z)=−z((z−a)2−a)=(z−a)2az
DSP实战 2 (反向应用)
已知一个序列的Z变换为 Y ( z ) = 2 z ( z − 0.5 ) 2 Y(z) = \frac{2z}{(z-0.5)^2} Y(z)=(z−0.5)22z,请利用Z变换的微分性质,写出其时域序列 y ( n ) y(n) y(n) 的表达式。
答案 :我们将 Y ( z ) Y(z) Y(z) 与上一题的结果 a z ( z − a ) 2 \frac{az}{(z-a)^2} (z−a)2az 进行对比。
令 a = 0.5 a=0.5 a=0.5,我们发现 Y ( z ) = 2 × ( 0.5 ) z ( z − 0.5 ) 2 = 4 × 0.5 z ( z − 0.5 ) 2 Y(z) = \frac{2 \times (0.5) z}{(z-0.5)^2} = 4 \times \frac{0.5z}{(z-0.5)^2} Y(z)=(z−0.5)22×(0.5)z=4×(z−0.5)20.5z。
我们知道 0.5 z ( z − 0.5 ) 2 \frac{0.5z}{(z-0.5)^2} (z−0.5)20.5z 是序列 n ( 0.5 ) n u ( n ) n (0.5)^n u(n) n(0.5)nu(n) 的Z变换。
根据Z变换的线性性质,可知:
y ( n ) = 4 n ( 0.5 ) n u ( n ) y(n) = 4 n (0.5)^n u(n) y(n)=4n(0.5)nu(n)
DSP实战 3 (概念应用)
为什么说巴特沃斯滤波器在通带中心频率附近提供了"最平坦"的响应?请从导数的角度解释。
答案 :函数在某点"平坦"意味着它在该点附近变化缓慢,其导数趋近于零。巴特沃斯滤波器的设计准则,是使其幅度平方函数在通带中心( Ω = 0 \Omega=0 Ω=0)的尽可能多的低阶导数都为零。导数为零的阶数越多,函数在该点就越"平坦",近似于一条水平线。因此,巴特沃斯滤波器通过最大化导数为零的阶数,实现了在通带中心附近"最平坦"的幅度响应。
积分:汇聚总量的艺术
积分是导数的逆运算,它的核心思想是**"无限分割,求和近似"**。它将一个看似无法直接计算的量(如不规则图形的面积),分割成无数个可以简单计算的微小部分,然后将这些部分的总和作为最终结果。在DSP中,积分是连接时域和频域的另一条关键纽带,它扮演着"合成"与"分析"的角色。
积分思想:从部分到整体的累积
定积分 ∫ a b f ( x ) d x \int_a^b f(x)dx ∫abf(x)dx 的本质是黎曼和的极限。我们把区间 a , b a, b a,b 分割成无数个微小的子区间,每个子区间的宽度为 Δ x \Delta x Δx,在每个子区间上取一个函数值 f ( x i ) f(x_i) f(xi),然后做乘积 f ( x i ) Δ x f(x_i)\Delta x f(xi)Δx(小矩形的面积),最后将所有小矩形的面积加起来 ∑ f ( x i ) Δ x \sum f(x_i)\Delta x ∑f(xi)Δx。当 Δ x → 0 \Delta x \to 0 Δx→0 时,这个和的极限就是积分。这个"分割-求和-取极限"的思想,是处理累积效应问题的普适方法。
DSP中的积分:重构时域的蓝图
1. 逆离散时间傅里叶变换 (IDTFT)
IDTFT是积分思想在DSP中最经典、最直接的应用。它告诉我们,如何从一个连续的频谱函数 X ( e j ω ) X(e^{j\omega}) X(ejω),合成出原始的时域离散序列 x ( n ) x(n) x(n):
x ( n ) = 1 2 π ∫ − π π X ( e j ω ) e j ω n d ω x(n) = \frac{1}{2\pi} \int_{-\pi}^{\pi} X(e^{j\omega}) e^{j\omega n} d\omega x(n)=2π1∫−ππX(ejω)ejωndω
应用解读 :这个公式应该如何理解?我们可以把它看作一个"合成"的过程。 e j ω n e^{j\omega n} ejωn 是一个频率为 ω \omega ω 的复指数基函数, X ( e j ω ) X(e^{j\omega}) X(ejω) 是这个基函数在最终信号 x ( n ) x(n) x(n) 中所占的"权重"或"幅度"。这个积分的含义是:将所有频率(从 − π -\pi −π到 π \pi π)的基函数,按照它们在频谱中的权重进行加权求和,最终就能重构出原始的时域信号。
这揭示了傅里叶分析的本质:任何一个信号,都可以被分解成无穷多个不同频率的正弦/复指数信号的叠加。而积分,就是完成这个"叠加"或"合成"的数学工具。
2. 帕斯瓦尔定理 (Parseval's Theorem)
帕斯瓦尔定理建立了信号在时域的能量与频域的能量之间的等式关系:
∑ n = − ∞ ∞ ∣ x ( n ) ∣ 2 = 1 2 π ∫ − π π ∣ X ( e j ω ) ∣ 2 d ω \sum_{n=-\infty}^{\infty} |x(n)|^2 = \frac{1}{2\pi} \int_{-\pi}^{\pi} |X(e^{j\omega})|^2 d\omega n=−∞∑∞∣x(n)∣2=2π1∫−ππ∣X(ejω)∣2dω
应用解读 :左边是对时域信号每个采样点能量的求和,代表了信号的总能量。右边的 ∣ X ( e j ω ) ∣ 2 |X(e^{j\omega})|^2 ∣X(ejω)∣2 被称为能量谱密度,它描述了信号能量在不同频率上的分布情况。对能量谱密度进行积分,同样是计算信号的总能量。这个定理的意义在于,它保证了信号经过傅里叶变换后,其总能量保持不变。这在通信系统中尤为重要,我们可以通过分析接收信号的频域能量,来判断信号的强度、信噪比等关键指标。
积分练习场
高数热身 1
计算定积分 ∫ 0 1 ( x 2 + 1 ) d x \int_0^1 (x^2 + 1) dx ∫01(x2+1)dx。
答案 :
∫ 0 1 ( x 2 + 1 ) d x = 1 3 x 3 + x 0 1 = ( 1 3 + 1 ) − ( 0 ) = 4 3 \int_0^1 (x^2 + 1) dx = \left \\frac{1}{3}x\^3 + x \\right_0^1 = (\frac{1}{3} + 1) - (0) = \frac{4}{3} ∫01(x2+1)dx=31x3+x01=(31+1)−(0)=34
高数热身 2
计算定积分 ∫ 0 π cos ( x ) d x \int_0^{\pi} \cos(x) dx ∫0πcos(x)dx。
答案 :
∫ 0 π cos ( x ) d x = sin ( x ) 0 π = sin ( π ) − sin ( 0 ) = 0 − 0 = 0 \int_0^{\pi} \cos(x) dx = \\sin(x)_0^{\pi} = \sin(\pi) - \sin(0) = 0 - 0 = 0 ∫0πcos(x)dx=sin(x)0π=sin(π)−sin(0)=0−0=0
高数热身 3
计算定积分 ∫ 0 2 π e j n x d x \int_0^{2\pi} e^{j n x} dx ∫02πejnxdx (其中n为非零整数)。
答案 :利用 e j θ = cos θ + j sin θ e^{j\theta} = \cos\theta + j\sin\theta ejθ=cosθ+jsinθ
∫ 0 2 π e j n x d x = 1 j n e j n x 0 2 π = 1 j n ( e j 2 π n − e 0 ) \int_0^{2\pi} e^{j n x} dx = \left \\frac{1}{jn} e\^{jnx} \\right_0^{2\pi} = \frac{1}{jn} (e^{j2\pi n} - e^0) ∫02πejnxdx=jn1ejnx02π=jn1(ej2πn−e0)
因为n为整数, e j 2 π n = cos ( 2 π n ) + j sin ( 2 π n ) = 1 e^{j2\pi n} = \cos(2\pi n) + j\sin(2\pi n) = 1 ej2πn=cos(2πn)+jsin(2πn)=1。
所以积分为 1 j n ( 1 − 1 ) = 0 \frac{1}{jn}(1-1) = 0 jn1(1−1)=0。这个结果在傅里叶级数中非常重要。
DSP实战 1 (IDTFT应用)
一个理想低通滤波器的频率响应为:
H ( e j ω ) = { 1 , ∣ ω ∣ ≤ ω c 0 , ω c < ∣ ω ∣ ≤ π H(e^{j\omega}) = \begin{cases} 1, & |\omega| \le \omega_c \\ 0, & \omega_c < |\omega| \le \pi \end{cases} H(ejω)={1,0,∣ω∣≤ωcωc<∣ω∣≤π
利用IDTFT公式,求其单位脉冲响应 h ( n ) h(n) h(n)。
答案 :
h ( n ) = 1 2 π ∫ − π π H ( e j ω ) e j ω n d ω = 1 2 π ∫ − ω c ω c 1 ⋅ e j ω n d ω h(n) = \frac{1}{2\pi} \int_{-\pi}^{\pi} H(e^{j\omega}) e^{j\omega n} d\omega = \frac{1}{2\pi} \int_{-\omega_c}^{\omega_c} 1 \cdot e^{j\omega n} d\omega h(n)=2π1∫−ππH(ejω)ejωndω=2π1∫−ωcωc1⋅ejωndω
= 1 2 π 1 j n e j ω n − ω c ω c = 1 2 π j n ( e j ω c n − e − j ω c n ) = \frac{1}{2\pi} \left \\frac{1}{jn} e\^{j\\omega n} \\right_{-\omega_c}^{\omega_c} = \frac{1}{2\pi jn} (e^{j\omega_c n} - e^{-j\omega_c n}) =2π1jn1ejωn−ωcωc=2πjn1(ejωcn−e−jωcn)
利用欧拉公式 sin θ = e j θ − e − j θ 2 j \sin\theta = \frac{e^{j\theta} - e^{-j\theta}}{2j} sinθ=2jejθ−e−jθ:
h ( n ) = 1 π n e j ω c n − e − j ω c n 2 j = sin ( ω c n ) π n h(n) = \frac{1}{\pi n} \frac{e^{j\omega_c n} - e^{-j\omega_c n}}{2j} = \frac{\sin(\omega_c n)}{\pi n} h(n)=πn12jejωcn−e−jωcn=πnsin(ωcn)
这就是著名的sinc函数,它是理想低通滤波器的脉冲响应。
DSP实战 2 (帕斯瓦尔定理应用)
已知序列 x ( n ) = δ ( n ) x(n) = \delta(n) x(n)=δ(n),即单位脉冲序列。请分别在时域和频域计算其总能量,并验证帕斯瓦尔定理。
答案:
- 时域计算 :
E = ∑ n = − ∞ ∞ ∣ x ( n ) ∣ 2 = ∣ x ( 0 ) ∣ 2 + ∑ n ≠ 0 ∣ 0 ∣ 2 = 1 2 = 1 E = \sum_{n=-\infty}^{\infty} |x(n)|^2 = |x(0)|^2 + \sum_{n \ne 0} |0|^2 = 1^2 = 1 E=∑n=−∞∞∣x(n)∣2=∣x(0)∣2+∑n=0∣0∣2=12=1 - 频域计算 :
首先求DTFT: X ( e j ω ) = ∑ n = − ∞ ∞ δ ( n ) e − j ω n = e − j ω ⋅ 0 = 1 X(e^{j\omega}) = \sum_{n=-\infty}^{\infty} \delta(n) e^{-j\omega n} = e^{-j\omega \cdot 0} = 1 X(ejω)=∑n=−∞∞δ(n)e−jωn=e−jω⋅0=1。
能量谱密度 ∣ X ( e j ω ) ∣ 2 = 1 2 = 1 |X(e^{j\omega})|^2 = 1^2 = 1 ∣X(ejω)∣2=12=1。
利用帕斯瓦尔定理的积分公式:
E = 1 2 π ∫ − π π ∣ X ( e j ω ) ∣ 2 d ω = 1 2 π ∫ − π π 1 d ω = 1 2 π ω − π π = 1 2 π ( π − ( − π ) ) = 2 π 2 π = 1 E = \frac{1}{2\pi} \int_{-\pi}^{\pi} |X(e^{j\omega})|^2 d\omega = \frac{1}{2\pi} \int_{-\pi}^{\pi} 1 d\omega = \frac{1}{2\pi} \\omega_{-\pi}^{\pi} = \frac{1}{2\pi}(\pi - (-\pi)) = \frac{2\pi}{2\pi} = 1 E=2π1∫−ππ∣X(ejω)∣2dω=2π1∫−ππ1dω=2π1ω−ππ=2π1(π−(−π))=2π2π=1 - 验证: 时域能量与频域能量相等,都为1。定理成立。
无穷级数:用有限驾驭无限
无穷级数是微积分中一个极为深刻和强大的概念。它试图回答一个终极问题:无穷多个数的和,能否是一个有限的数?对这个问题的探索,催生了收敛、发散、收敛域等一系列核心概念。在DSP中,无穷级数不仅仅是一个计算工具,它就是Z变换和傅里叶变换本身的定义,是整个频域分析大厦的奠基石。
级数思想:无穷项的有序之和
一个无穷级数 ∑ n = 0 ∞ a n \sum_{n=0}^{\infty} a_n ∑n=0∞an 是否收敛,取决于其部分和序列 S N = ∑ n = 0 N a n S_N = \sum_{n=0}^{N} a_n SN=∑n=0Nan 是否有极限。在所有级数中,**几何级数(等比数列求和)**在DSP中拥有至高无上的地位:
∑ n = 0 ∞ a r n = a 1 − r , 当且仅当 ∣ r ∣ < 1 \sum_{n=0}^{\infty} ar^n = \frac{a}{1-r}, \quad \text{当且仅当} |r| < 1 n=0∑∞arn=1−ra,当且仅当∣r∣<1
这个简单的公式,以及它的收敛条件 ∣ r ∣ < 1 |r|<1 ∣r∣<1,是解开Z变换奥秘的万能钥匙。
更进一步,幂级数 ∑ n = 0 ∞ c n ( z − z 0 ) n \sum_{n=0}^{\infty} c_n (z-z_0)^n ∑n=0∞cn(z−z0)n 将这个思想推广到了复数域。幂级数不会在所有复平面上都收敛,它只在一个以 z 0 z_0 z0 为中心的圆形区域内收敛,这个区域被称为收敛域(Region of Convergence, ROC)。
DSP中的级数:Z变换的灵魂
1. Z变换和DTFT的定义
现在,让我们再次审视Z变换和DTFT的定义式:
X ( z ) = ∑ n = − ∞ ∞ x ( n ) z − n X(z) = \sum_{n=-\infty}^{\infty} x(n) z^{-n} X(z)=n=−∞∑∞x(n)z−n
X ( e j ω ) = ∑ n = − ∞ ∞ x ( n ) e − j ω n X(e^{j\omega}) = \sum_{n=-\infty}^{\infty} x(n) e^{-j\omega n} X(ejω)=n=−∞∑∞x(n)e−jωn
它们是什么?它们就是无穷级数!
- Z变换 是一个以 z − 1 z^{-1} z−1 为变量的双边幂级数。
- DTFT 是Z变换在 z = e j ω z=e^{j\omega} z=ejω(即单位圆)上的特殊情况,本质上是一个傅里叶级数。
2. 收敛域 (ROC) 的核心地位
既然Z变换是幂级数,那么它的收敛性问题就至关重要。一个序列的Z变换能否存在,完全取决于这个幂级数是否收敛。而决定其收敛性的区域,就是收敛域(ROC)。
让我们来看一个最经典的例子:因果指数序列 x ( n ) = a n u ( n ) x(n) = a^n u(n) x(n)=anu(n)。
其Z变换为:
X ( z ) = ∑ n = 0 ∞ a n z − n = ∑ n = 0 ∞ ( a z − 1 ) n X(z) = \sum_{n=0}^{\infty} a^n z^{-n} = \sum_{n=0}^{\infty} (az^{-1})^n X(z)=n=0∑∞anz−n=n=0∑∞(az−1)n
这是一个公比为 r = a z − 1 r = az^{-1} r=az−1 的几何级数!根据几何级数的收敛条件,该级数收敛当且仅当 ∣ r ∣ < 1 |r| < 1 ∣r∣<1,即:
∣ a z − 1 ∣ < 1 ⟹ ∣ a / z ∣ < 1 ⟹ ∣ z ∣ > ∣ a ∣ |az^{-1}| < 1 \implies |a/z| < 1 \implies |z| > |a| ∣az−1∣<1⟹∣a/z∣<1⟹∣z∣>∣a∣
这个 ∣ z ∣ > ∣ a ∣ |z|>|a| ∣z∣>∣a∣ 就是序列 a n u ( n ) a^n u(n) anu(n) 的Z变换的收敛域 。它告诉我们,只有当复变量 z z z 在复平面上,以原点为中心、半径为 ∣ a ∣ |a| ∣a∣ 的圆的外部取值时,这个Z变换才有意义。
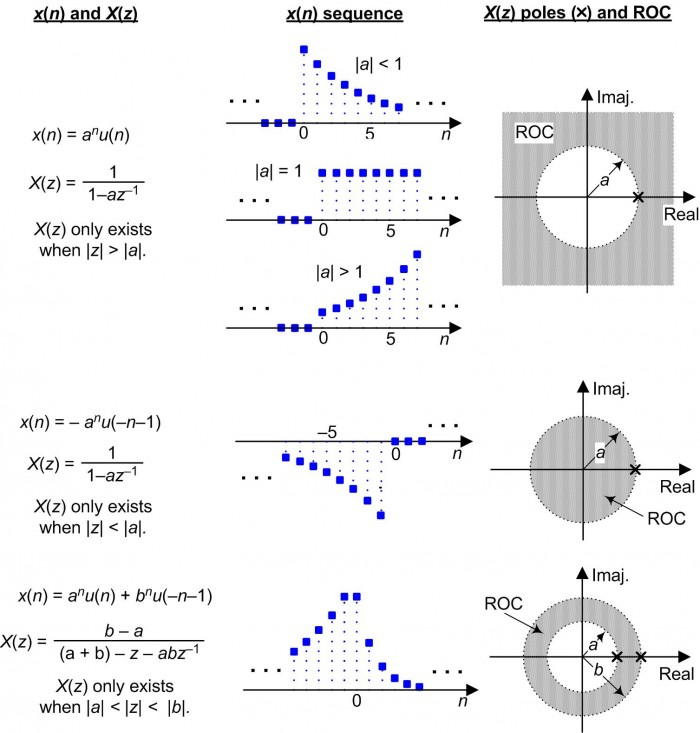
(上图展示了因果序列Z变换的收敛域,它是一个由极点决定的圆的外部区域)
ROC的概念至关重要,因为它:
- 决定了Z变换的存在性。
- 与序列类型唯一对应:右边序列对应圆外ROC,左边序列对应圆内ROC,双边序列对应环形ROC。
- 帮助区分不同的序列 :例如, a n u ( n ) a^n u(n) anu(n) 和 − a n u ( − n − 1 ) -a^n u(-n-1) −anu(−n−1) 的Z变换表达式完全相同,但它们的ROC不同,从而对应不同的时域序列。
- 决定了系统的因果性和稳定性 :
- 因果系统的ROC必须是某个圆的外部。
- 稳定系统 的ROC必须包含单位圆 ∣ z ∣ = 1 |z|=1 ∣z∣=1。因为只有ROC包含单位圆,DTFT( H ( z ) H(z) H(z)在单位圆上的取值)才存在,系统才有稳定的频率响应。
3. 用级数求逆Z变换
逆Z变换的一种基本方法就是幂级数展开法(长除法) 。例如,对于 X ( z ) = 1 1 − a z − 1 X(z) = \frac{1}{1-az^{-1}} X(z)=1−az−11,我们通过长除法可以得到:
X ( z ) = 1 + a z − 1 + a 2 z − 2 + a 3 z − 3 + ... X(z) = 1 + az^{-1} + a^2z^{-2} + a^3z^{-3} + \dots X(z)=1+az−1+a2z−2+a3z−3+...
这个展开式本身就是一个幂级数。根据Z变换的定义 X ( z ) = ∑ x ( n ) z − n X(z) = \sum x(n)z^{-n} X(z)=∑x(n)z−n,我们逐项对比系数,就能直接读出时域序列: x ( 0 ) = 1 , x ( 1 ) = a , x ( 2 ) = a 2 , ... x(0)=1, x(1)=a, x(2)=a^2, \dots x(0)=1,x(1)=a,x(2)=a2,...,即 x ( n ) = a n u ( n ) x(n) = a^n u(n) x(n)=anu(n)。这完美地展示了Z变换与幂级数之间的同构关系。
级数练习场
高数热身 1
判断几何级数 ∑ n = 0 ∞ ( 3 2 ) n \sum_{n=0}^{\infty} (\frac{3}{2})^n ∑n=0∞(23)n 是否收敛。
答案 :不收敛。因为公比 r = 3 / 2 > 1 r=3/2 > 1 r=3/2>1。
高数热身 2
求几何级数 ∑ n = 0 ∞ 5 ⋅ ( 0.8 ) n \sum_{n=0}^{\infty} 5 \cdot (0.8)^n ∑n=0∞5⋅(0.8)n 的和。
答案 :这是一个收敛的几何级数,首项 a = 5 a=5 a=5,公比 r = 0.8 r=0.8 r=0.8。
和 S = a 1 − r = 5 1 − 0.8 = 5 0.2 = 25 S = \frac{a}{1-r} = \frac{5}{1-0.8} = \frac{5}{0.2} = 25 S=1−ra=1−0.85=0.25=25。
高数热身 3
求幂级数 ∑ n = 0 ∞ x n 2 n \sum_{n=0}^{\infty} \frac{x^n}{2^n} ∑n=0∞2nxn 的收敛域。
答案 :该级数可写为 ∑ n = 0 ∞ ( x 2 ) n \sum_{n=0}^{\infty} (\frac{x}{2})^n ∑n=0∞(2x)n。这是一个公比为 r = x / 2 r=x/2 r=x/2 的几何级数。
收敛条件为 ∣ r ∣ < 1 |r|<1 ∣r∣<1,即 ∣ x 2 ∣ < 1 ⟹ ∣ x ∣ < 2 |\frac{x}{2}| < 1 \implies |x| < 2 ∣2x∣<1⟹∣x∣<2。
所以收敛域为 ( − 2 , 2 ) (-2, 2) (−2,2)。
DSP实战 1 (Z变换与ROC)
求序列 x ( n ) = ( 0.5 ) n u ( n ) + ( 3 ) n u ( n ) x(n) = (0.5)^n u(n) + (3)^n u(n) x(n)=(0.5)nu(n)+(3)nu(n) 的Z变换及收敛域。
答案:利用Z变换的线性性质。
- ( 0.5 ) n u ( n ) (0.5)^n u(n) (0.5)nu(n) 的Z变换为 X 1 ( z ) = 1 1 − 0.5 z − 1 X_1(z) = \frac{1}{1-0.5z^{-1}} X1(z)=1−0.5z−11,ROC为 ∣ z ∣ > 0.5 |z|>0.5 ∣z∣>0.5。
- ( 3 ) n u ( n ) (3)^n u(n) (3)nu(n) 的Z变换为 X 2 ( z ) = 1 1 − 3 z − 1 X_2(z) = \frac{1}{1-3z^{-1}} X2(z)=1−3z−11,ROC为 ∣ z ∣ > 3 |z|>3 ∣z∣>3。
两个序列相加,其Z变换的收敛域必须是两者ROC的交集 。
∣ z ∣ > 0.5 |z|>0.5 ∣z∣>0.5 和 ∣ z ∣ > 3 |z|>3 ∣z∣>3 的交集是 ∣ z ∣ > 3 |z|>3 ∣z∣>3。
所以, X ( z ) = 1 1 − 0.5 z − 1 + 1 1 − 3 z − 1 X(z) = \frac{1}{1-0.5z^{-1}} + \frac{1}{1-3z^{-1}} X(z)=1−0.5z−11+1−3z−11,ROC为 ∣ z ∣ > 3 |z|>3 ∣z∣>3。
DSP实战 2 (ROC与系统稳定性)
一个因果LTI系统的系统函数为 H ( z ) = 1 1 − 0.9 z − 1 + 1 1 − 1.2 z − 1 H(z) = \frac{1}{1 - 0.9z^{-1}} + \frac{1}{1-1.2z^{-1}} H(z)=1−0.9z−11+1−1.2z−11。请问该系统是稳定的吗?为什么?
答案 :不稳定。
系统的极点位于 p 1 = 0.9 p_1=0.9 p1=0.9 和 p 2 = 1.2 p_2=1.2 p2=1.2。
因为系统是因果的,其ROC是包含所有极点的最外层圆的外部,即 ∣ z ∣ > 1.2 |z|>1.2 ∣z∣>1.2。
一个系统是稳定的,当且仅当其ROC包含单位圆 ∣ z ∣ = 1 |z|=1 ∣z∣=1。
该系统的ROC为 ∣ z ∣ > 1.2 |z|>1.2 ∣z∣>1.2,显然不包含单位圆。因此,系统不稳定。
DSP实战 3 (长除法求逆变换)
利用长除法求 X ( z ) = 1 1 + 2 z − 1 X(z) = \frac{1}{1+2z^{-1}} X(z)=1+2z−11 对应的因果序列 x ( n ) x(n) x(n) 的前4个值。
答案:
1 - 2z^-1 + 4z^-2 - 8z^-3 + ...
_________________________
1+2z^-1 | 1
-(1 + 2z^-1)
___________
-2z^-1
-(-2z^-1 - 4z^-2)
______________
4z^-2
-(4z^-2 + 8z^-3)
______________
-8z^-3所以 X ( z ) = 1 − 2 z − 1 + 4 z − 2 − 8 z − 3 + ... X(z) = 1 - 2z^{-1} + 4z^{-2} - 8z^{-3} + \dots X(z)=1−2z−1+4z−2−8z−3+...
对比系数可知: x ( 0 ) = 1 , x ( 1 ) = − 2 , x ( 2 ) = 4 , x ( 3 ) = − 8 x(0)=1, x(1)=-2, x(2)=4, x(3)=-8 x(0)=1,x(1)=−2,x(2)=4,x(3)=−8。
总结:数学是通往DSP世界的钥匙
我们今天进行了一次穿越数学与工程的深度旅行。我们看到:
- 极限,为我们提供了分析系统边界行为的望远镜(初值/终值定理)。
- 导数,成为了我们精细雕刻和定义滤波器频响特性的刻刀(最大平坦特性)。
- 积分,扮演了从频域蓝图合成时域信号的总工程师(逆傅里叶变换)。
- 无穷级数,则构成了整个Z变换和频域分析理论的逻辑基石和语言(收敛域)。
掌握这些数学基石,你将不再是DSP知识的被动接收者,而是能够主动理解、分析甚至创造新算法的思考者。数学不是障碍,而是你手中最强大的那把,能打开任何技术黑箱的钥匙。