面阵vs线阵相机:怎么选不踩坑?选型公式直接套用
🎯面阵vs线阵相机怎么选不踩坑?
在工业视觉里,选相机不是"看参数选贵的",而是先分清"面阵"和"线阵"------前者是"一次性拍全图",后者是"线状扫大图",适用场景完全不同。今天用简洁的逻辑,拆解两者的核心差异,再给上面阵、线阵的选型计算公式,帮你按需求精准匹配,避免买错浪费。
🎯一、面阵相机:工业检测的"万能选手",拍全图靠它
面阵相机的核心是"以面为单位成像",一次就能拍下物体的完整二维图,不用额外拼接,是工业里最常用的相机类型。
- 核心特性:靠像素矩阵成像,分辨率由镜头焦距和传感器像素共同决定(比如同一款相机,配短焦镜头拍大视野,配长焦镜头拍细节)。按传感器结构还能分帧转移、全帧转移等类型,比如全帧转移适合拍动态物体,不会有拖影。
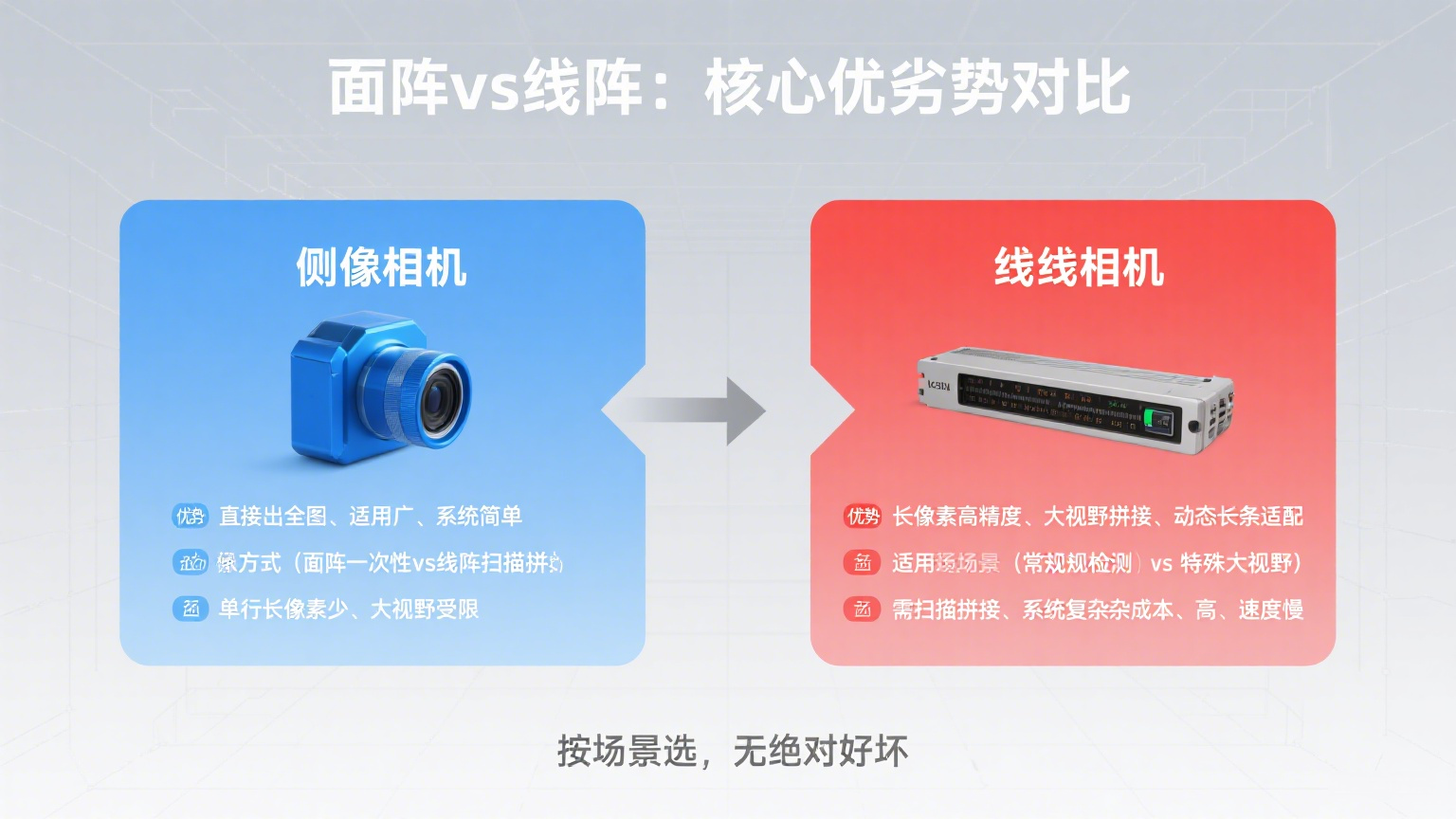
- 优劣势很明确 :
✅ 优势:直接出全图,测量直观(比如看零件形状、测尺寸),适用场景广,从电子元件检测到包装定位都能用;
❌ 劣势:单行长像素数比线阵少,帧率受限(拍超高速运动物体容易糊);传感器面积难做大,大视野场景(比如拍整张大面板)不够用。 - 典型应用 :零件尺寸检测、表面划痕识别、机械臂定位、产品外观判断,80%的常规工业检测场景都优先选它。

🎯二、线阵相机:大视野/高精度的"专属工具",扫大图才用
线阵相机成像呈"线状",宽度只有几个像素,要配合运动(比如传送带移动)多次抓拍,再把"线图"拼成完整二维图,不是通用款,只在特殊场景用。
- 核心适用场景 :
- 细长带状检测:比如滚筒表面、线材、布匹,这些物体的检测区域是长条状,线阵相机能精准覆盖;
- 超大视野/超高精度:比如检测1米宽的玻璃面板、3米长的钢板,面阵相机拍不下,线阵可以通过扫描拼接出超大图(拼接后图尺寸能达几M,远超面阵单图的400K-1M)。
- 优劣势要注意 :
✅ 优势:单行长像素数多(能到8K甚至更高),精度上限高;总像素少,帧率比同精度面阵高,适合动态长条物体(比如运动中的卷材);
❌ 劣势:要配合扫描运动和光栅(记录位置),系统复杂、成本高;拼接耗时间,检测速度慢,普通场景用不上。

🎯三、选型攻略:面阵/线阵怎么算?公式直接套
选相机核心是"按需求算参数",再匹配镜头,避免参数不兼容导致成像失效。
🌟(一)线阵相机+镜头选型:按"幅宽、精度、速度"算
线阵选型要先明确3个输入值:幅宽(被测长度)、最小检测精度、物体运动速度,按3步算参数:
- 算每行所需像素:每行像素数 = 幅宽 ÷ 最小检测精度(选比计算值大的标准型号,比如算得1600像素,选2048像素(2K)相机);
- 算实际精度:实际精度 = 幅宽 ÷ 所选相机像素数(例:幅宽1600mm,2048像素相机,实际精度≈0.8mm);
- 算扫描频率:每秒扫描行数(kHz)= 物体运动速度 ÷ 实际精度(例:速度22000mm/s,实际精度0.8mm,需选28kHz及以上相机)。
镜头选型要点:
- 接口要专用:常规C口不够用,选M42x1、F口等,匹配相机分辨率(2K/4K/8K);
- 算放大倍率:先算芯片尺寸(传感器尺寸=分辨率×像素尺寸),再用"放大倍率=芯片尺寸÷视野范围"计算;
- 对后背焦:不同厂家相机后背焦不同,必须匹配,否则成像模糊。

🌟(二)面阵相机+镜头选型:按"视野、精度、工作距"算
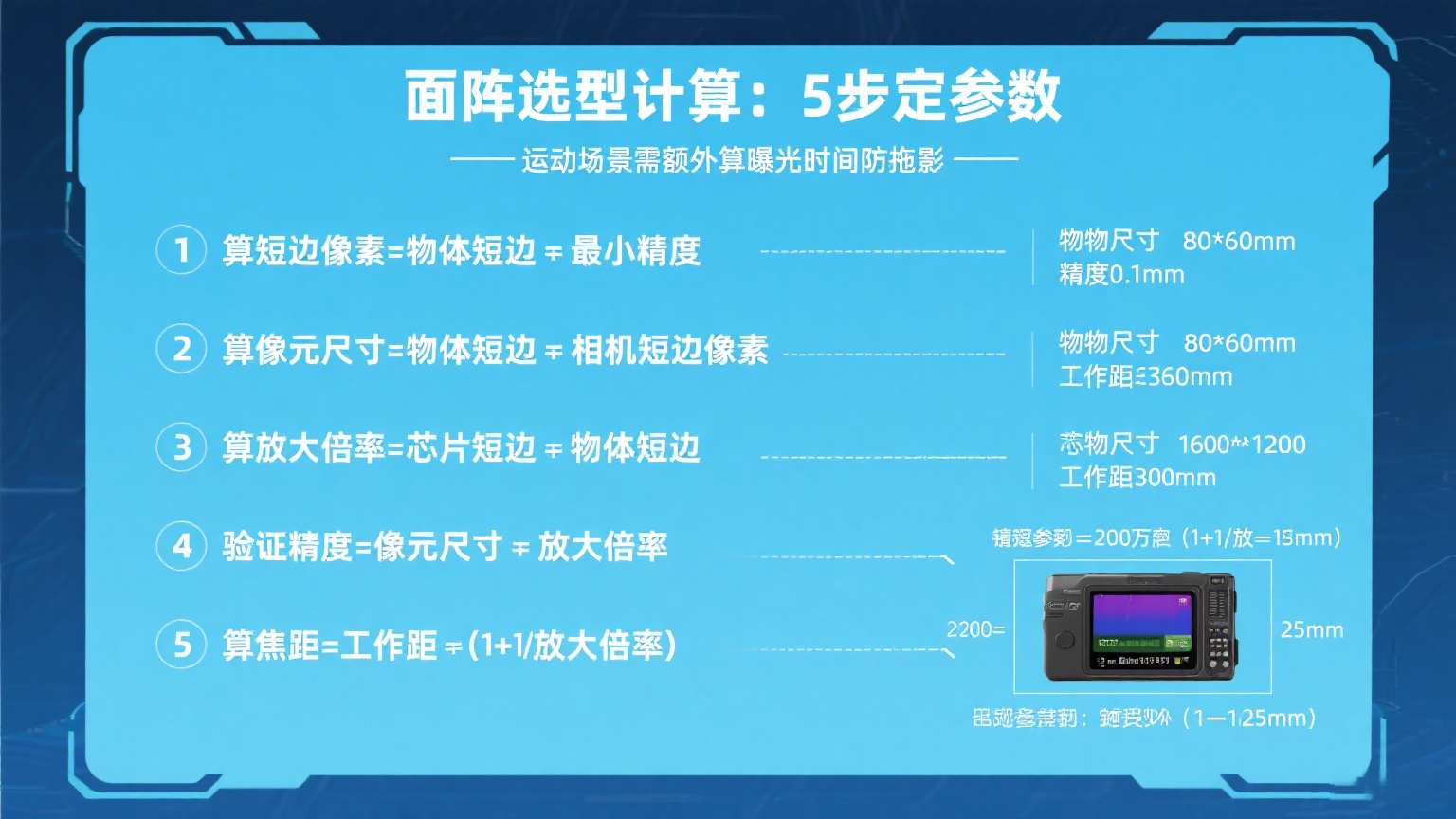
已知输入值:被测物体尺寸(A×B)、最小分辨尺寸(C)、工作距(D),5步算参数:
- 算短边所需像素:短边像素数=物体短边尺寸(B)÷最小分辨尺寸(C)(相机长/短边像素都要大于这个数);
- 算像元尺寸:像元尺寸=物体短边尺寸(B)÷所选相机短边像素数;
- 算放大倍率:放大倍率=相机芯片短边尺寸÷物体短边尺寸(B);
- 验证精度:可分辨精度=像元尺寸÷放大倍率(需小于C,否则换相机);
- 算镜头焦距:焦距=工作距(D)÷(1+1/放大倍率)(单位:mm)。
额外提醒:运动场景要算曝光时间(避免拖影),公式:曝光时间 < 长边视野范围÷(长边像素×物体运动速度)。
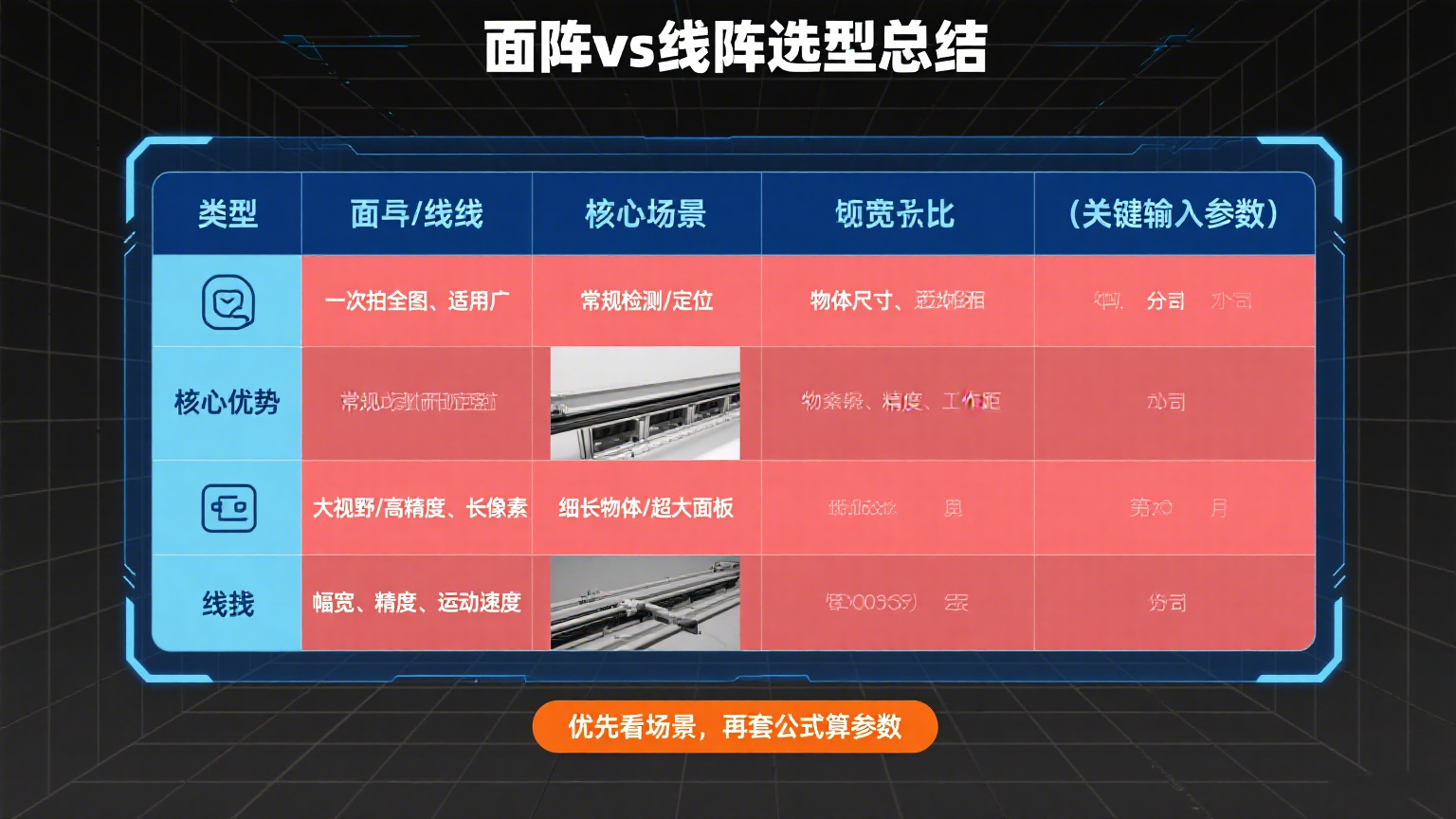
🎯总结:面阵vs线阵选型对照表
| 类型 | 核心优势 | 适用场景 | 选型关键输入参数 |
|---|---|---|---|
| 面阵相机 | 一次拍全图,直观高效 | 常规尺寸检测、形状识别、定位 | 物体尺寸、最小精度、工作距 |
| 线阵相机 | 大视野/高精度,长像素 | 细长物体、超大面板、超高精度检测 | 幅宽、最小精度、物体运动速度 |
记住:优先看"是否需要拍大视野/长条物体"------常规场景选面阵,超宽、超长、超高精度场景选线阵,再按公式算参数,镜头匹配好接口和倍率,就能选对不踩坑。