目录
1.摘要
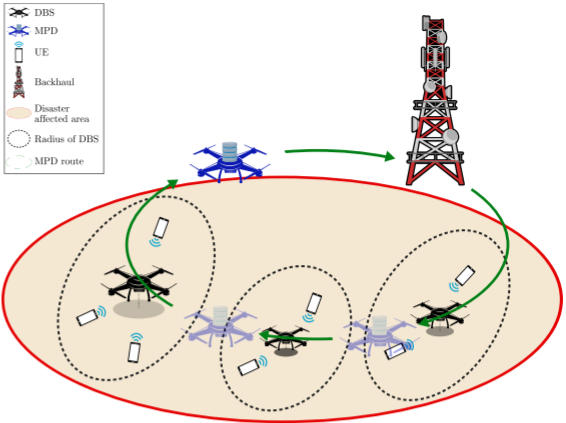
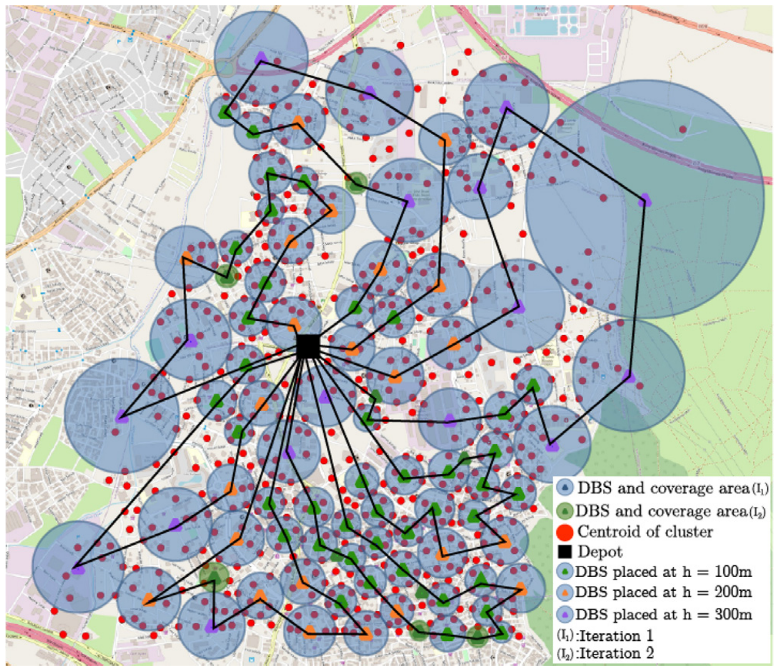
本文针对灾害发生后传统通信系统失效的问题,提出了一种基于无人机创新通信解决方案。通过将无人机作为数据采集与传输平台,收集并回传受灾人群的消息与位置信息,建立稳定的应急通信网络。研究构建了一个优化模型,用于确定无人机基站的三维部署位置,以最大化覆盖率和服务质量,同时引入移动供电无人机为基站和数据传输提供能源,并对其路径进行优化。为提高求解效率,设计了基于聚类的混合启发式算法,并在土耳其苏丹贝利省开展案例研究。
2.问题描述与数学模型
无线通信中QoS表述:路径损耗模型
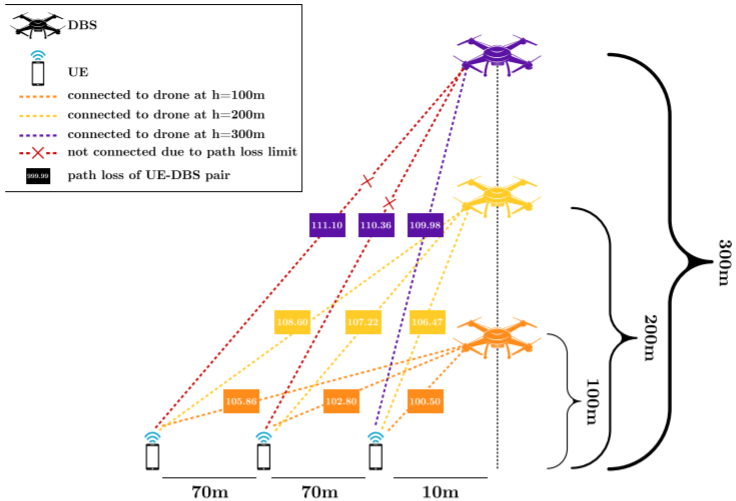
路径损耗模型用于量化无人机与用户设备间的信号衰减,是评估无线通信QoS的核心工具。模型综合考虑无人机高度、水平距离以及视距 (LoS) 与非视距 (NLoS) 场景差异,并以对数形式刻画信号随距离衰减的规律。同时引入高度-距离相关函数及载波频率、光速等参数,以更准确反映传播环境下的附加损耗,该模型能够有效评估灾后无人机通信中的覆盖质量与信号可靠性。
P ( h , r i ) = 1 1 + a exp ( − b ( arctan ( h r i ) − a ) ) P\left(h,r_i\right)=\frac{1}{1+a\exp\left(-b\left(\arctan\left(\frac{h}{r_i}\right)-a\right)\right)} P(h,ri)=1+aexp(−b(arctan(rih)−a))1
L ( h , r i ) = 20 log ( h 2 + r i 2 ) + ( η L o S − η N L o S ) P ( h , r i ) + 20 log ( 4 π f c ) + η N L o S L(h,r_i)=20\log\left(\sqrt{h^2+r_i^2}\right)+\left(\eta_{LoS}-\eta_{NLoS}\right)P(h,r_i)+20\log\left(\frac{4\pi f}{c}\right)+\eta_{NLoS} L(h,ri)=20log(h2+ri2 )+(ηLoS−ηNLoS)P(h,ri)+20log(c4πf)+ηNLoS
数学模型
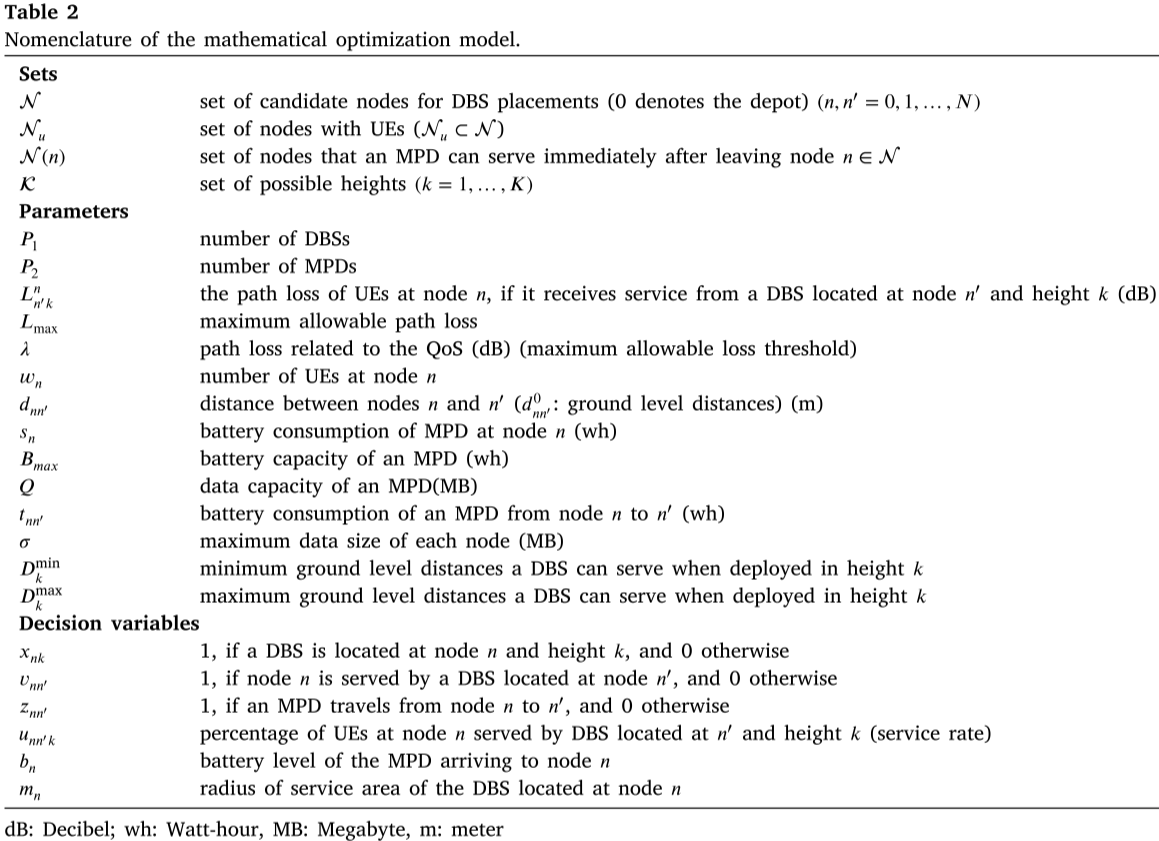
HDPRP模型确定无人机基站的三维部署位置与移动供电无人机的路径,以最大化用户覆盖率、降低路径损耗并最小化供电无人机行程。模型通过变量分解与耦合约束减少计算复杂度,并在保证服务质量(QoS)的前提下,实现灾后场景中高效、可扩展的无人机通信网络配置。
max b , m , u , x , v , z ∑ n ∈ N u α ∑ n ′ ∈ N ∑ k ∈ K w n u n n ′ k − β ( ∑ k ∈ K L n ′ k n w n u n n ′ k + ∑ n ′ ∈ N d n n ′ z n n ′ ) \max_{b,m,u,x,v,z}\quad\sum_{n\in\mathcal{N}_{u}}\left\\alpha\\sum_{n\^{\\prime}\\in\\mathcal{N}}\\sum_{k\\in\\mathcal{K}}w_{n}u_{nn\^{\\prime}k}-\\beta\\left(\\sum_{k\\in\\mathcal{K}}L_{n\^{\\prime}k}\^{n}w_{n}u_{nn\^{\\prime}k}+\\sum_{n\^{\\prime}\\in\\mathcal{N}}d_{nn\^{\\prime}}z_{nn\^{\\prime}}\\right)\\right b,m,u,x,v,zmaxn∈Nu∑αn′∈N∑k∈K∑wnunn′k−β(k∈K∑Ln′knwnunn′k+n′∈N∑dnn′znn′)
HDPRP模型约束过多,见原文。
3.求解方法
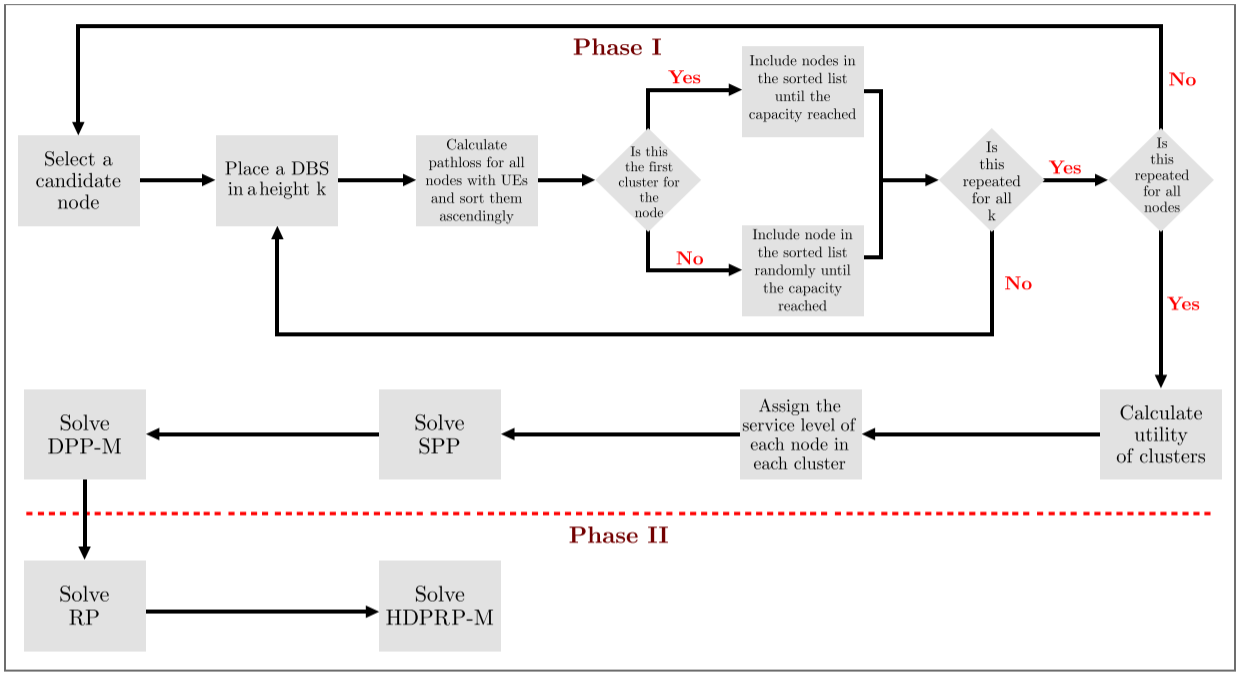
为解决HDPRP模型计算量大、商业求解器难以高效处理的问题,本文提出了一种基于聚类两阶段启发式算法(CRMA)。
- 阶段 I(聚类):通过迭代生成聚类,计算路径损耗并分配用户,最终筛选出效用最高的 DBS 部署位置与节点分配方案。
- 阶段 II(路径规划):在确定 DBS 布局后,为 MPDs 设计最优路径以实现能量补给与信息传输。
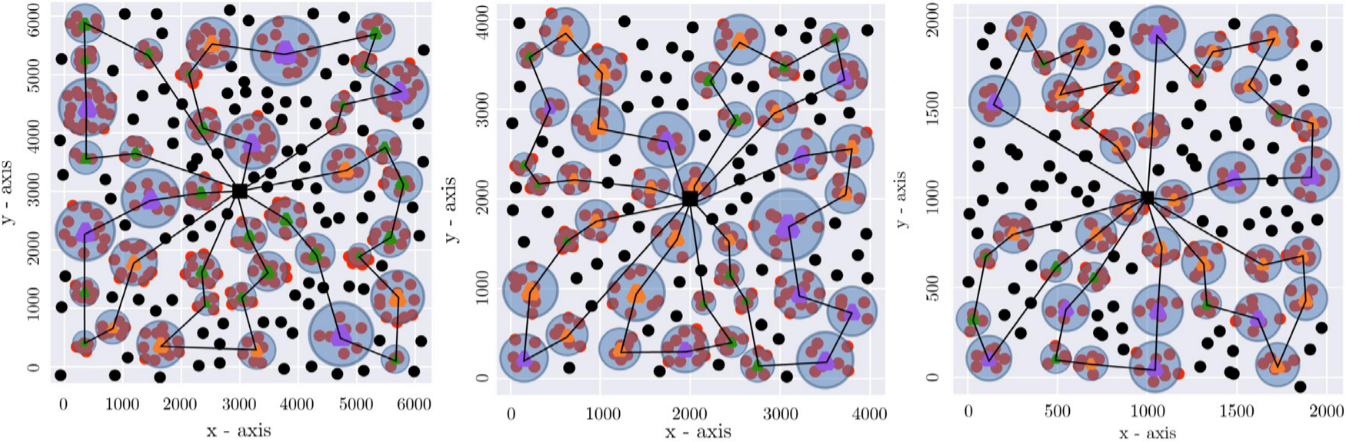
4.结果展示
5.参考文献
1 Avishan F, Karasu M B, Çap M, et al. Optimization of drone base station locations and mobile charging drone routing for post-disaster communicationJ. Computers & Operations Research, 2025: 107206.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx