目录
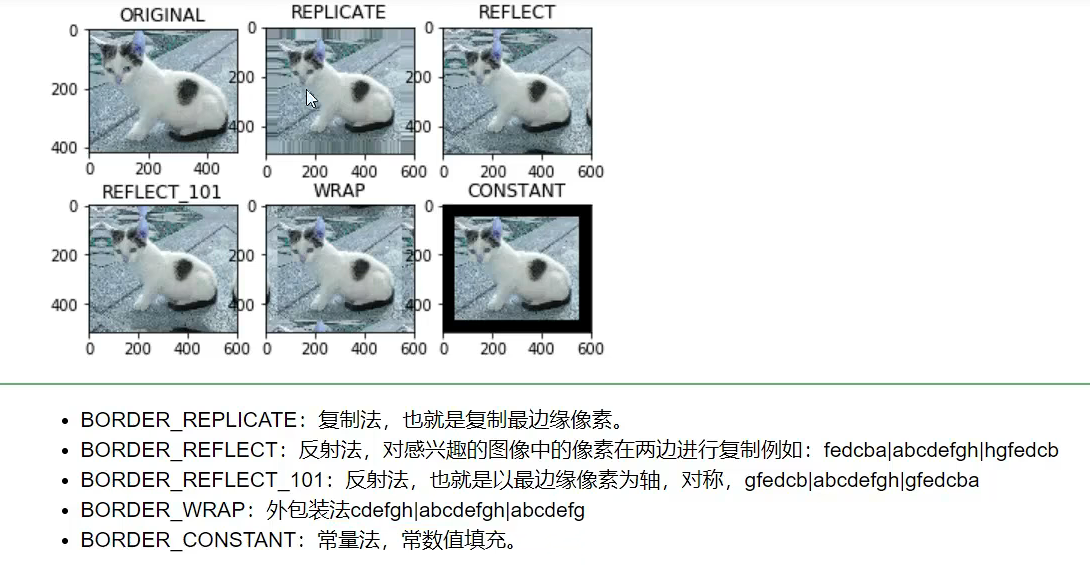
1.边界填充
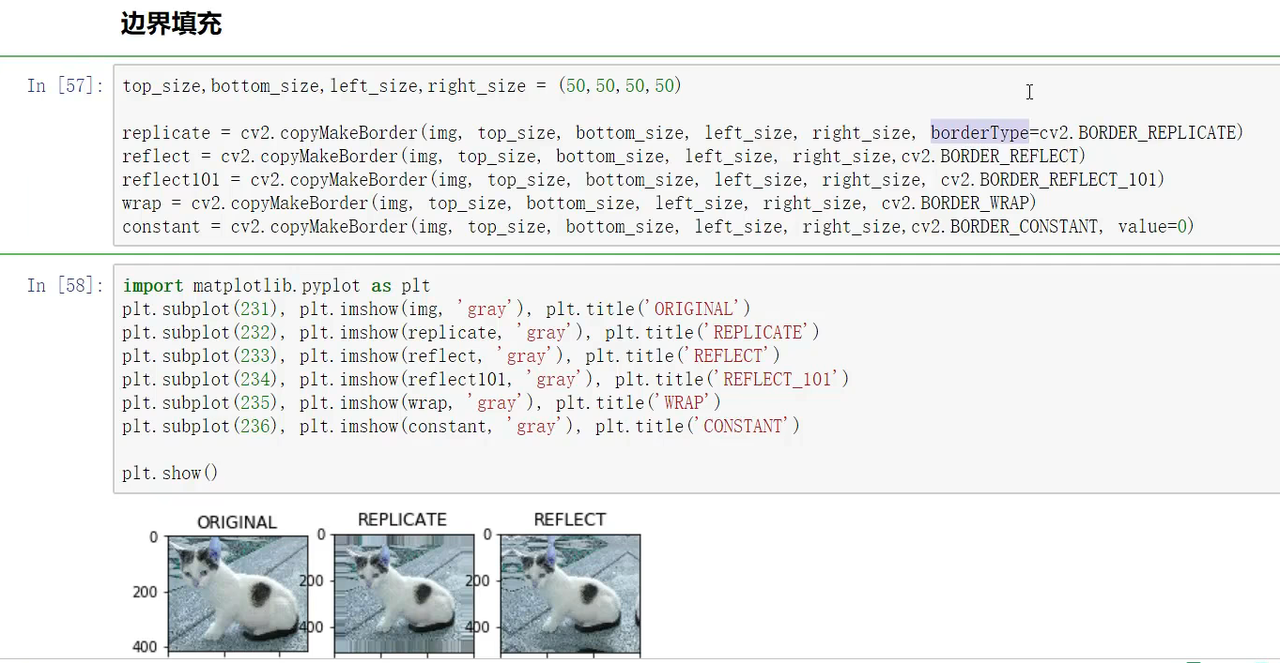
用的函数都是copyMakeBorder,最后的参数是填充方法
2.图像的相关数值计算
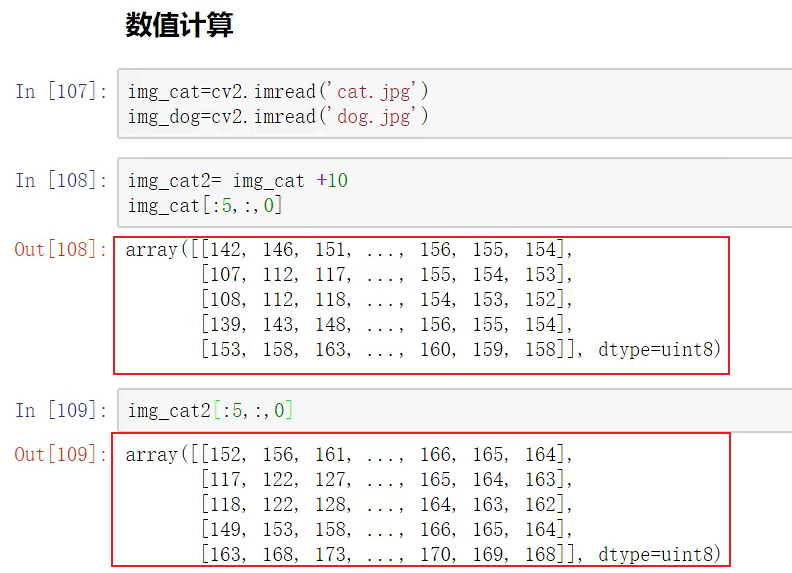
每个像素点加10
:5,:,0只打印前面5行
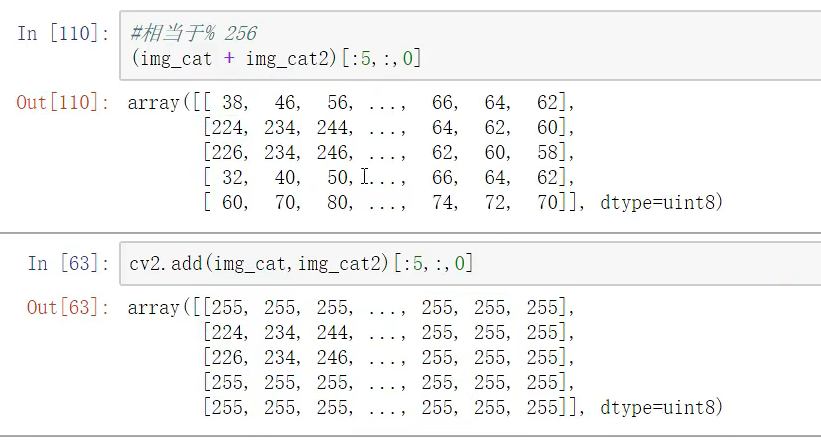
add是直接等于两图像的像素点值之和,但是不可以超过255,超过255就等于255
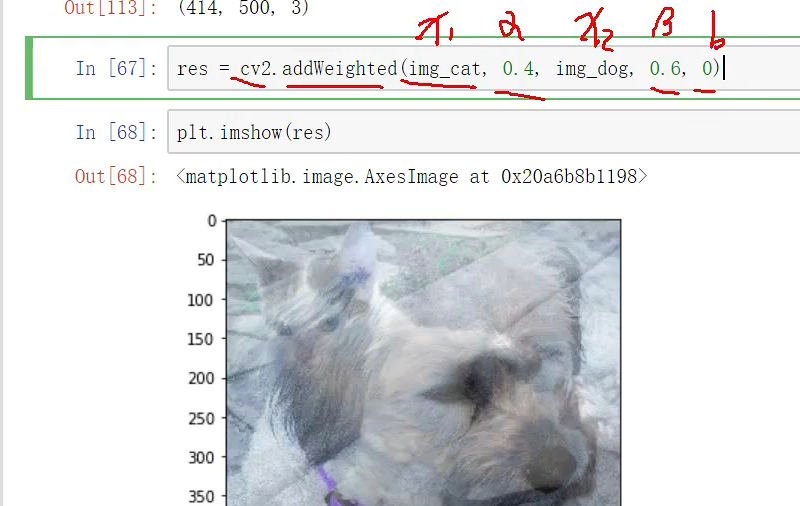
3.图像融合
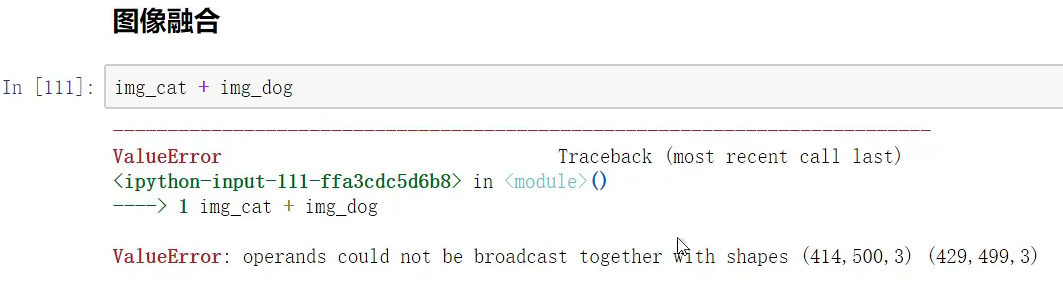
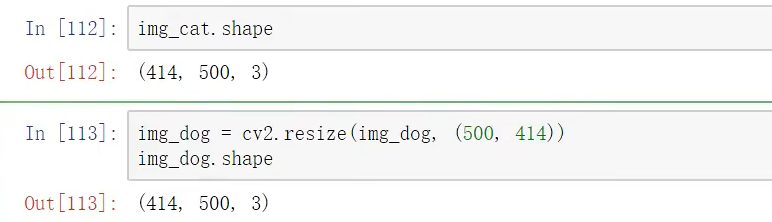
图像大小不一样不能融合
进行相应的转换
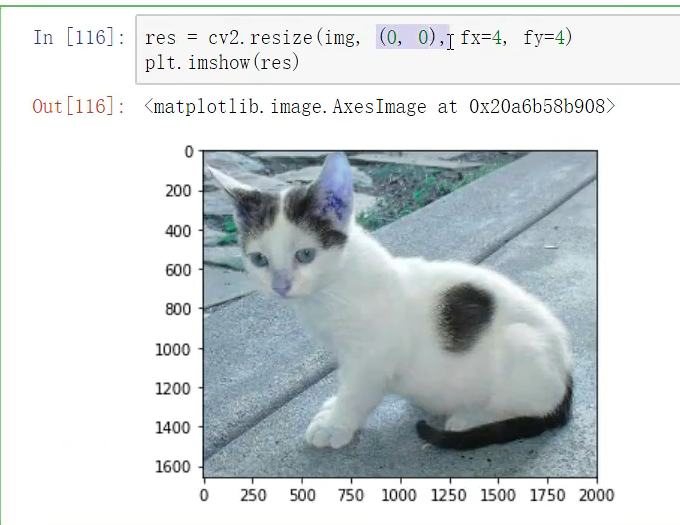
也可以将目标值设为(0,0),进行比例缩放
fx=4表示将x轴变为原来的4倍
fy=4表示将y轴变为原来的4倍
也可以缩放为其他倍数
0.4是cat图像的权重,0.6是dog图像的权重,0是偏置项(给图像提亮多少)
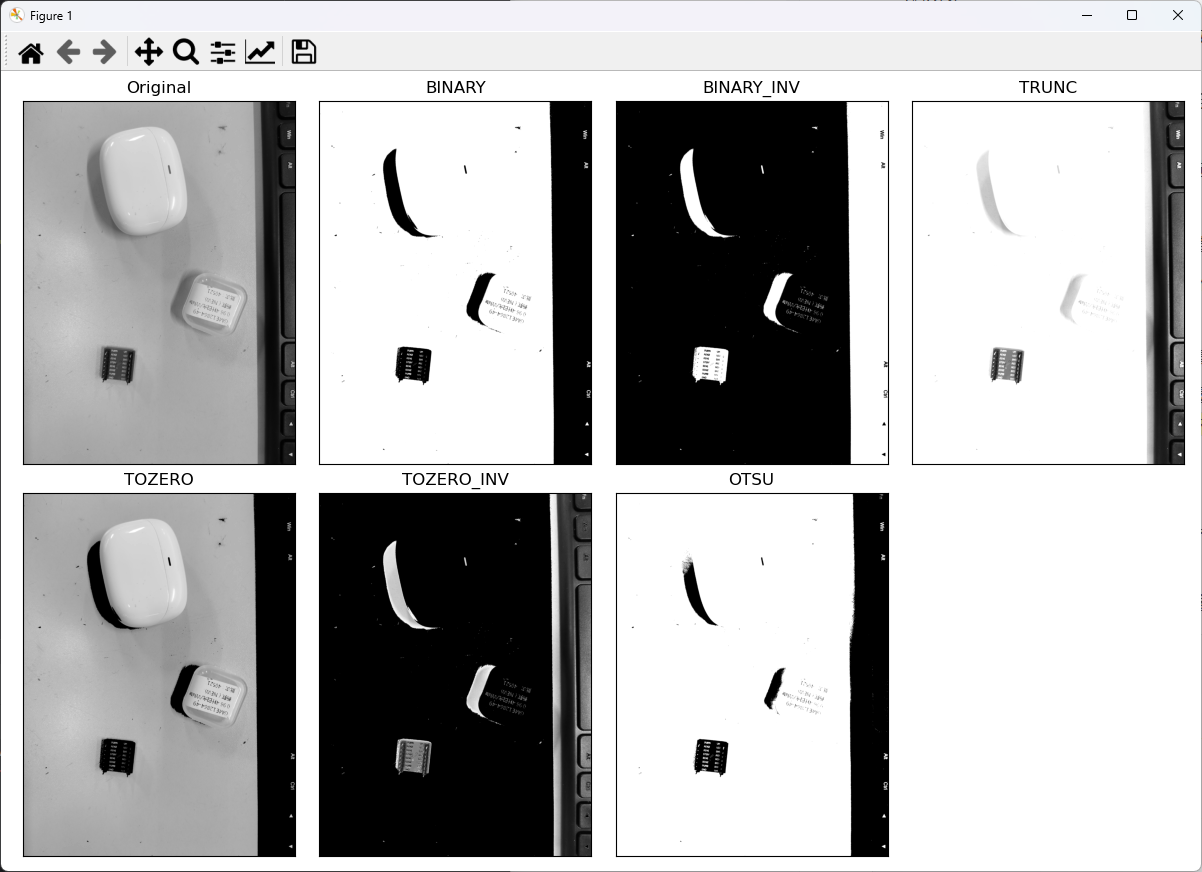
4.图像阈值
函数
python
cv2.threshold(src, thresh, maxval, type)函数作用
cv2.threshold() 函数的主要功能是将灰度图像转换为二值图像。在转换过程中,会把图像中每个像素的值与设定的阈值进行比较,再依据比较结果为该像素赋予新的值。
参数解析
cv2.threshold(src, thresh, maxval, type) 函数包含 4 个参数,下面分别介绍:
-
src:这是输入的图像,要求必须是单通道的灰度图像。如果传入的是彩色图像,需要先将其转换为灰度图。
-
thresh:即设定的阈值,是一个浮点数或者整数。在比较时,会用图像中每个像素的值与这个阈值作对比。
-
maxval:当像素值满足阈值条件时,会将该像素的值设为这个
maxval。它也是一个浮点数或者整数。 -
type:表示阈值处理的类型,有多种选择,具体如下:
-
cv2.THRESH_BINARY:二值阈值,若像素值大于阈值,则设为
maxval,否则设为 0。 -
cv2.THRESH_BINARY_INV:反二值阈值,像素值大于阈值时设为 0,否则设为
maxval。 -
cv2.THRESH_TRUNC:截断阈值,像素值大于阈值时设为阈值,否则保持原像素值。
-
cv2.THRESH_TOZERO:归零阈值,像素值大于阈值时保持不变,否则设为 0。
-
cv2.THRESH_TOZERO_INV:反归零阈值,像素值大于阈值时设为 0,否则保持不变。
-
cv2.THRESH_OTSU:大津法自动阈值,会自动计算最优阈值,使用时需将该标志和前面的阈值类型结合,例如
cv2.THRESH_BINARY + cv2.THRESH_OTSU。
-
返回值
该函数会返回两个值:
-
ret:返回计算得到的阈值。如果使用了 OTSU 或 TRIANGLE 方法,就会返回自动计算出的阈值,否则返回设定的阈值。
-
dst:是处理后的输出图像,为二值图像。
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 读取图像并转换为灰度图
image = cv2.imread('example.jpg')
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 应用不同的阈值处理
ret1, thresh1 = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
ret2, thresh2 = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY_INV)
ret3, thresh3 = cv2.threshold(gray, 127, 255, cv2.THRESH_TRUNC)
ret4, thresh4 = cv2.threshold(gray, 127, 255, cv2.THRESH_TOZERO)
ret5, thresh5 = cv2.threshold(gray, 127, 255, cv2.THRESH_TOZERO_INV)
# 使用 OTSU 方法自动计算阈值
ret6, thresh6 = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
# 显示结果
titles = ['Original', 'BINARY', 'BINARY_INV', 'TRUNC', 'TOZERO', 'TOZERO_INV', 'OTSU']
images = [gray, thresh1, thresh2, thresh3, thresh4, thresh5, thresh6]
plt.figure(figsize=(12, 8))
for i in range(7):
plt.subplot(2, 4, i+1)
plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]), plt.yticks([])
plt.tight_layout()
plt.show()物体检测适合用 BINARY 类型,而图像降噪可考虑 TOZERO 类型。